1 Introduction
There are a number of new memory technologies that are impacting, or likely to impact, computing architectures in the near future. One example of such a technology is so called high bandwidth memory, already featured on Intel’s latest many-core processor, the Xeon Phi Knights Landing [1], and NVIDIA’s latest GPU, Volta [2]. These contain MCDRAM [1] and HBM2 [3] respectively, memory technologies built with traditional DRAM hardware but connected with a very wide memory bus (or series of buses) directly to the processor to provide very high memory bandwidth when compared to traditional main memory (DDR channels).
This has been enabled, in part, by the hardware trend for incorporating memory controllers and memory controller hubs directly onto processors, enabling memory to be attached to the processor itself rather than through the motherboard and associated chipset. However, the underlying memory hardware is the same, or at least very similar, to the traditional volatile DRAM memory that is still used as main memory for computer architectures, and that remains attached to the motherboard rather than the processor.
Non-volatile memory, i.e. memory that retains data even after power is turned off, has been exploited by consumer electronics and computer systems for many years. The flash memory cards used in cameras and mobile phones are an example of such hardware, used for data storage. More recently, flash memory has been used for high performance data input/output (I/O) in the form of Solid State Disk (SSD) drives, providing higher bandwidth and lower latency than traditional Hard Disk Drives (HDD).
Whilst flash memory can provide fast I/O performance for computer systems, there are some drawbacks. It has limited endurance when compare to HDD technology, restricted by the number of modifications a memory cell can undertake and thus the effective lifetime of the flash storage [29]. It is also generally more expensive than other storage technologies. However, SSD storage, and enterprise level SSD drives, are heavily used for I/O intensive functionality in large scale computer systems because of their random read and write performance capabilities.
Byte-addressable random access persistent memory (B-APM), also known as storage class memory (SCM), NVRAM or NVDIMMs, exploits a new generation of non-volatile memory hardware that is directly accessible via CPU load/store operations, has much higher durability than standard flash memory, and much higher read and write performance. B-APM, with its very high performance access characteristics, and vastly increased capacity (compared to volatile memory), offers a potential hardware solution to enable the construction of a compute platform that can support high-performance computing (HPC) and high-performance data analytics (HPDA) use cases, addressing some of the performance imbalance systems currently have between memory and I/O performance.
In this paper, we outline the systemware and hardware required to provide such a system, and discuss preliminary performance results from just such a system. We start by describing persistent memory, and the functionality it provides, in more detail in Sect. 2. In Sect. 3 we discuss how B-APM could be exploited for scientific computation or data analytics. Following this we outline our systemware architecture in Sect. 4. We finish by presenting performance results on a prototype system containing Intel Optane DC Persistent memory, in Sect. 5, discussing related work in Sect. 6, and summarise the paper in the final section.
2 Persistent Memory
B-APM takes new non-volatile memory technology and packages it in the same form factor (i.e. using the same connector and dimensions) as main memory (SDRAM DIMM form factor). This allows B-APM to be installed and used alongside DRAM based main memory, accessed through the same memory controller. As B-APM is installed in a processor’s memory channels, applications running on the system can access B-APM directly in the same manner as main memory, including true random data access at byte or cache line granularity. Such an access mechanism is very different to the traditional block based approaches used for current HDD or SSD devices, which generally requires I/O to be done using blocks of data (i.e. 4 KB of data written or read in one operation), and relies on expensive kernel interrupts and context switches.
The first B-APM technology to make it to market is Intel’s Optane DC Persistent memory [5]. The performance of this B-APM is lower than main memory (with a latency
memory [5]. The performance of this B-APM is lower than main memory (with a latency  5–10x that of DDR4 memory when connected to the same memory channels), but much faster than SSDs or HDDs. It is also much larger capacity than DRAM, around 2–5x denser (i.e. 2–5x more capacity in the same form factor, with 128, 256, and 512 GB currently available DIMMs).
5–10x that of DDR4 memory when connected to the same memory channels), but much faster than SSDs or HDDs. It is also much larger capacity than DRAM, around 2–5x denser (i.e. 2–5x more capacity in the same form factor, with 128, 256, and 512 GB currently available DIMMs).
2.1 Data Access
This new class of memory offers very large memory capacity for servers, as well as long term persistent storage within the memory space of the servers, and the ability to undertake I/O in a new way. B-APM can enable synchronous, byte level, direct access (DAX) to persistent data, moving away from the asynchronous block-based file I/O applications currently rely on. In current asynchronous I/O user applications pass data to the operating system (OS) which then use driver software to issue an I/O command, putting the I/O request into a queue on a hardware controller. The hardware controller will process that command when ready, notifying the OS that the I/O operation has finished through an interrupt to the device driver.
B-APM, on the other hand, can be accessed simply by using a load or store instruction, as with any other memory operation from an application or program. However, because B-APM can provide persistence functionality (allowing data to be accessible after power loss), some further considerations are required if persistent is to be guaranteed. Applications must also ensure stored data has been flush from the volatile CPU caches and has arrived on the non-volatile medium (using new cache flush commands and fence instructions to ensure stores are ordered ordered before subsequent instructions) before they can confirm data has been persisted (although this flush may only be required to the memory controller, rather than the non-volatile medium, if using enhanced power supply functionality [6]).
With B-APM providing much lower latencies than external storage devices, the traditional I/O block access model, using interrupts, becomes inefficient because of the overhead of context switches between user and kernel mode (which can take thousands of CPU cycles [30]). Furthermore, in the future it may become possible to implement remote persistent access to data stored in the memory using RDMA technology over a suitable interconnect. Using high performance networks has the potential to enable access to data stored in B-APM in remote nodes faster than accessing local high performance SSDs via traditional I/O interfaces and stacks inside a node.
Therefore, it is possible to use B-APM to greatly improve I/O performance within a server; increase the memory capacity of a server; or provide a remote data store with high performance access for a group of servers to share. Such storage hardware can also be scaled up by adding more B-APM memory in a server, or adding more nodes to the remote data store, allowing the I/O performance of a system to scale as required. The use of B-APM in compute nodes also removes competition for I/O resources between jobs in a system, isolating application I/O traffic and removing the performance fluctuations associated with I/O users often experience on shared HPC systems [25]. However, if B-APM is provisioned in the servers, there must be software support for managing data within the B-APM. This includes moving data as required for the jobs running on the system, and providing the functionality to let applications run on any server and still utilise the B-APM for fast I/O and storage (i.e. applications should be able to access B-APM in remote nodes if the system is configured with B-APM only in a subset of all nodes).
As B-APM is persistent, it also has the potential to be used for resiliency, providing backup for data from active applications, or providing long term storage for databases or data stores required by a range of applications. With support from the systemware, servers can be enabled to handle power loss without experiencing data loss, efficiently and transparently recovering from power failure and resuming applications from their latest running state, and maintaining data with little overhead in terms of performance.
2.2 B-APM Modes of Operation
Ongoing developments in memory hierarchies, such as the high bandwidth memory in Xeon Phi manycore processors or NVIDIA GPUS, have provided new memory models for programmers and system designers. A common model that has been proposed includes the ability to configure main memory and B-APM in two different modes: Single-level and Dual-level memory [8].
Single-level memory, or SLM, has main memory (DRAM) and B-APM as two separate memory spaces, both accessible by applications, as outlined in Fig. 1. This is very similar to the Flat Mode [7] configuration of the high bandwidth, on-package, MCDRAM in Intel Knights Landing processor. The DRAM is allocated and managed via standard memory API’s such as malloc and represent the OS visible main memory size. The B-APM is be managed by programming APIs and presents the non-volatile part of the system memory. In order to take advantage of B-APM in SLM mode, systemware or applications have to be adapted to use these two distinct address spaces.
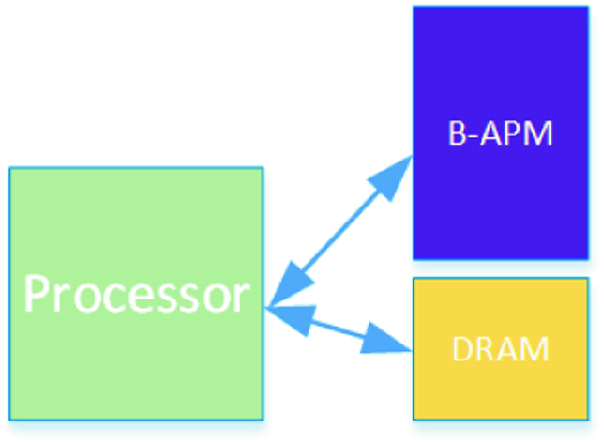
Single-level memory (SLM) configuration using main memory and B-APM
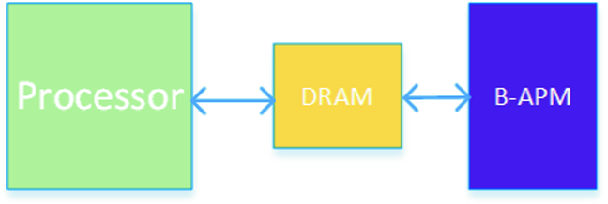
Dual-level memory (DLM) configuration using main memory and B-APM
This mode of operation does not require applications to be altered to exploit the capacity of B-APM, and aims to give memory access performance at main memory speeds whilst providing access to the large memory space of B-APM. However, exactly how well the main memory cache performs will depend on the specific memory requirements and access pattern of a given application. Furthermore, persistence of the B-APM contents cannot be longer guaranteed, due to the volatile DRAM cache in front of the B-APM, so the non-volatile characteristics of B-APM are not exploited. A hybrid mode is also supported, where only a part of the B-APM is used to extend the main memory and the remaining part is used for persistent operations. The sizes of B-APM used for memory extension and persistent memory can be set flexibly.
2.3 Non-volatile Memory Software Ecosystem
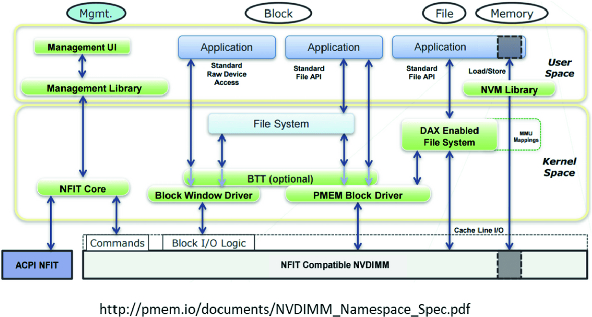
PMDK software architecture
Software stack exploiting B-APM in compute nodes
3 Opportunities for Exploiting B-APM for Computational Simulations and Data Analytics
Reading data from and writing it to persistent storage is usually not the most time consuming part of computational simulation applications. Analysis of common applications from a range of different scientific areas shows that around 5–20% of runtime for applications is involved in I/O operations [10, 11]. It is evident that B-APM can be used to improve I/O performance for applications by replacing slower SSDs or HDDs in external filesystems. However, such a use of B-APM would be only an incremental improvement in I/O performance, and would neglect some of the significant features of B-APM that can provide performance benefits for applications.
Firstly, deploying B-APM as an external filesystem would require provisioning a filesystem on top of the B-APM hardware. Standard storage devices require a filesystem to enable data to be easily written to or read from the hardware. However, B-APM does not require such functionality, and data can be manipulated directly on B-APM hardware simply through load/store instructions. Adding the filesystem and associated interface guarantees (i.e. POSIX interface [12]) adds performance overheads that will reduce I/O performance on B-APM.
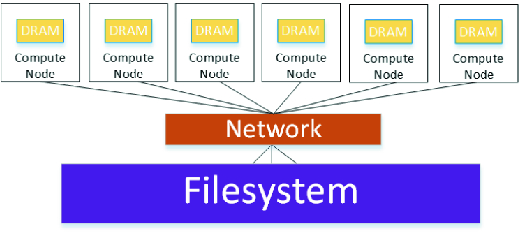
Current external storage for HPC and HPDA systems
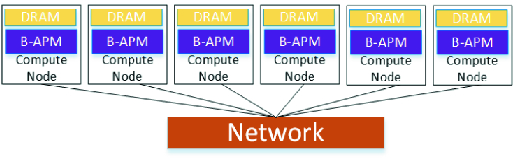
Internal storage using B-APM in compute nodes for HPC and HPDA systems
Our vision for exploiting B-APM for HPC and HPDA systems is to incorporate the B-APM into the compute nodes, as outlined in Fig. 6. This architecture allows applications to exploit the full performance of B-APM within the compute nodes they are using, by enabling access to B-APM through load/store operations at byte-level granularity, as opposed to block based, asynchronous I/O. Incorporating B-APM into compute nodes also has the benefit that I/O capacity and bandwidth can scale with the number of compute nodes in the system. Adding more compute nodes will increase the amount of B-APM in the system and add more aggregate bandwidth to I/O/B-APM operations.
For example, current memory bandwidth of a HPC system scales with the number of nodes used. If we assume an achievable memory bandwidth per node of 200 GB/s, then it follows that a system with 10 nodes has the potential to provide 2TB/s of memory bandwidth for a distributed application, and a system with 10000 nodes can provide 2PB/s of memory bandwidth. If an application is memory bandwidth bound and can parallelise across nodes then scaling up nodes in this fashion clearly has the potential to improve performance. For B-APM in nodes, and taking Intel®Optane DC persistent memory (DCPMM) as an example, we have measured 40 GB/s of memory bandwidth per node (read and write) or 80 GB/s (read) for the STREAMS benchmark using DCPMM (two sockets), then scaling up to 10 nodes provides 400 GB/s of (I/O) memory bandwidth and 10000 nodes provides 400 TB/s of(I/O) memory bandwidth. For comparison, the Titan system at ORNL has a Lustre file system with 1.4TB/s of bandwidth [26] and they are aiming for 50 TB/s of burst buffer [28] I/O by 2024 [27]. Furthermore, there is the potential to optimise not only the performance of a single application, but the performance of a whole scientific workflow, from data preparation, simulations, data analysis and visualisation. Optimising full workflows by sharing data between different stages or steps in the workflow has the scope to completely remove, or greatly reduce, data movement/storage costs (and associated energy costs) for large parts of the workflow altogether. Leaving data in-situ on B-APM for other parts of the workflow can significantly improve the performance of analysis and visualisation steps at the same time as reducing I/O costs for the application when writing the data out.
Finally, the total runtime of an application can be seen as the sum of its compute time, plus the time spent in I/O. Greatly reduced I/O costs therefore also has the beneficial side effect of allowing applications to perform more I/O within the same total cost of the overall application run. This will enable applications to maintain I/O costs in line with current behaviour whilst being able to process significantly more data. Furthermore, for those applications for which I/O does take up a large portion of the run time, including data analytics applications, B-APM has the potential to significantly reduce runtime.
3.1 Potential Caveats
However, utilising internal storage is not without drawbacks. Firstly, the benefit of external storage is that there is a single namespace and location for compute nodes to use for data storage and retrieval. This means that applications can run on any compute nodes and access the same data as it is stored external to the compute nodes. With internal storage, this guarantee is not provided, data written to B-APM is local to specific compute nodes. It is therefore necessary for applications to be able to manage and move data between compute nodes, as well as to external data storage, or for some systemware components to undertake this task, to reduce scheduling restrictions on applications sharing a system with a finite set of compute nodes.
Secondly, B-APM may be expensive to provision in all compute nodes. It may not be practical to add the same amount of B-APM to all compute nodes, meaning systems may be constructed with islands of nodes with B-APM, and islands of nodes without B-APM. Therefore, application or systemware functionality to enable access to remote B-APM and to exploit/manage asymmetric B-APM configurations will be required. Both these issues highlight the requirement for an integrated hardware and software (systemware) architecture to enable efficient and easy use of this new memory technology in large scale computational platforms.
4 Systemware Architecture
Systemware implements the software functionality necessary to enable users to easily and efficiently utilise the system. We have designed a systemware architecture that provides a number of different types of functionality, related to different methods for exploiting B-APM for large scale computational simulation or data analytics.
- 1.
Enable users to be able to request systemware components to load/store data in B-APM prior to a job starting, or after a job has completed. This can be thought of as similar to current burst buffer technology. This will allow users to be able to exploit B-APM without changing their applications.
- 2.
Enable users to directly exploit B-APM by modifying their applications to implement direct memory access and management. This offers users the ability to access the best performance B-APM can provide, but requires application developers to undertake the task of programming for B-APM themselves, and ensure they are using it in an efficient manner.
- 3.
Provide a filesystem built on the B-APM in compute nodes. This allows users to exploit B-APM for I/O operations without having to fundamentally change how I/O is implemented in their applications. However, it does not enable the benefit of moving away from file based I/O that B-APM can provide.
- 4.
Provide an object, or key value, store that exploits the B-APM to enable users to explore different mechanisms for storing and accessing data from their applications.
- 5.
Enable the sharing of data between applications through B-APM. For example, this may be sharing data between different components of the same computational workflow, or the sharing of a common dataset between a group of users.
- 6.
Ensure data access is restricted to those authorised to access that data and enable deletion or encryption of data to make sure those access restrictions are maintained
- 7.
Provide different memory modes if they are supported by the B-APM hardware.
- 8.
Enable job scheduling on the system that can optimise performance or energy usage by utilising B-APM functionality
The systemware architecture we have defined appear to have a large number of components and significant complexity, however the number of systemware components that are specific to a system that contains B-APM is relatively small. The new or modified components we have identified are required to support B-APM in a large scale, multi-user, multi-application, compute platforms are as follows; Job Scheduler, Data Scheduler, Object Store, and Filesystems. There are a number of object stores under development, of which some are focussed on efficiently exploiting B-APM hardware, such as DAOS [21] and dataClay [22]. As such we will not focus on object stores in this paper. Likewise, there are a plethora of filesystems that could be deployed on the hardware, both as local filesystems on each node (i.e. ext4) or as distributed filesystems spanning compute nodes (i.e. GekkoFS [33]). We will utilise some filesystems to test performance but not focus on the specifics of filesystems in this paper.
4.1 Job Scheduler
As the innovation in our proposed system is the inclusion of B-APM within nodes, one of the key components that must support the new hardware resource is the job scheduler. Job schedulers, or batch systems, are used to manage, schedule, and run user jobs on the shared resource that are the compute nodes. Standard job schedulers are configured with the number of nodes in a system, the number of cores per node, and possibly the amount of memory or whether there are accelerators (like GPUs) in compute nodes in a system. They then use this information, along with a scheduling algorithm and scheduling policies, to allocate user job request to a set of compute nodes. Users submit job requests specifying the compute resources required (i.e. number of nodes or number of compute cores a job will require) along with a maximum runtime for the job. This information is used by the job scheduler to accurately, efficiently, and fairly assign applications to resources.
Adding B-APM to compute nodes provides another layer of hardware resource that needs to managed by the job scheduler. As data can persist in B-APM, and one of our target use cases is the sharing of data between applications using B-APM, the job scheduler needs to be extended to both be aware of this new hardware resource, and to allow data to be retained in B-APM after an individual job has finished. This functionality is achieved through adding workflow awareness to the job scheduler, providing functionality to allow data to be retained and shared through jobs participating in the workflow, although not indefinitely [24]. The job scheduler also needs to be able to clean up the B-APM after a job has finished, ensuring no data is left behind or B-APM resources consumed, unless specifically as part of a workflow. Job schedulers already do support assigning resources to jobs, in the form of burst buffer allocations. They also can support workflows, with users able to specify dependencies between jobs submitted or running on a system. However, currently no schedulers support workflow locality, the association of specific nodes with workflow jobs, as is required when sharing data residing in compute nodes. The allocation of burst buffer resources through scheduler functionality also does not provide support for the local nature of data in B-APM, relying on the external nature of burst buffer placements in the storage hierarchy.
Furthermore, as the memory system can have different modes of operation, a supporting job scheduler will need to be able to query the current configuration of the memory hardware, and be able to change configuration modes if required by the next job that will be using a particular set of compute nodes. There are job schedulers that do have support for querying and modify hardware configurations, such as Slurm functionality to support different KNL processor configurations. However, the configuration of B-APM is significantly more complex that KNL MCDRAM, and requires the use of multiple system tools or interfaces to ensure valid memory configurations can be achieved. This requires significant extra on-node scheduler functionality for a job scheduler.
Finally, efficiently allowing users to exploit this new hardware resource will require data aware and energy aware scheduling algorithms. These will utilise the job scheduler’s awareness of B-APM functionality and compute job data requirements, and enable scheduling compute tasks to data rather than moving data to compute tasks (as is currently done with external filesystems), or moving data between compute nodes or external filesystems as required to maximise the utilisation or efficiency of the overall system.
4.2 Data Scheduler
The data scheduler is an entirely new component, designed to run on each compute node and provide data movement and shepherding functionality. This include functionality to allow users to move data to and from B-APM asynchronously (i.e. pre-loading data before a job starts, or moving data from B-APM after a job finishes), or between different nodes (i.e. in the case that a job runs on a node without B-APM and requires B-APM functionality, or a job runs and needs to access data left on B-APM in a different node by another job). To provide such support without requiring users to modify their applications we implement functionality in the data scheduler component. This component has interfaces for applications to interact with, and is also for job scheduler component on each compute node. Through these interfaces the data scheduler can be instructed to move data as required by a given application or workflow.
5 Performance Evaluation
To evaluate the performance and usability of our architectures we benchmarked on a prototype HPC system with B-APM installed in the compute nodes. We used a range of different benchmarks, from synthetic workflows, through large scale applications, and I/O benchmarks such as IOR [38].
Test System and Setup: All experiments were conducted using a prototype system composed of 34 compute nodes. Each node has two Intel® Xeon® Platinum 8260M CPU running at 2.40 GHz (i.e. 48 physical cores per node), 192 GiB of DDR4 RAM (12  16 GB DIMMs) and 3 TBytes of DCPMM memory (12
16 GB DIMMs) and 3 TBytes of DCPMM memory (12  256GB DCPMM DIMMs). A single rail Intel® Omni Path network connects the compute nodes through a 100 Gbps switch, as well as to a 270 TB external Lustre filesystem with 6 OSTs. The compute nodes are running Linux CentOS 7.5 and we use Slurm for job scheduling. To manage and configure the DCPMM we use Intel’s ipmctl and Linux’s ndctl [37] tools. Version 1.05 of the PMDK toolkit is installed, along with the Intel 19 compiler suite, and Intel’s MPI and MKL libraries.
256GB DCPMM DIMMs). A single rail Intel® Omni Path network connects the compute nodes through a 100 Gbps switch, as well as to a 270 TB external Lustre filesystem with 6 OSTs. The compute nodes are running Linux CentOS 7.5 and we use Slurm for job scheduling. To manage and configure the DCPMM we use Intel’s ipmctl and Linux’s ndctl [37] tools. Version 1.05 of the PMDK toolkit is installed, along with the Intel 19 compiler suite, and Intel’s MPI and MKL libraries.
Synthetic Workflow: We created a synthetic workflow benchmark that contains two components, a producer and a consumer of data. These components can be configured to produce and consume a number of files of different sizes, but then do no work other than reading or writing and verifying data. We ran this benchmark either targeting the Lustre filesystem or the B-APM in the compute node, and also using the job scheduler integration and data scheduler component to maintain data in B-APM between workflow component execution. Table 1 outlines the performance achieved when producing and consuming 200 GB (10  20 GB files) of data for each configuration. Each benchmark workflow ran 5 times and we report the mean time to complete the benchmark. Performance varied by
20 GB files) of data for each configuration. Each benchmark workflow ran 5 times and we report the mean time to complete the benchmark. Performance varied by 
 across runs when using Lustre and
across runs when using Lustre and  when using B-APM. When using B-APM we ran a job that reads and writes 200 GB of data between workflow components on the same node to ensure caching does not affect performance. Benchmarks were compiled using the Intel 19 compiler with the -O3 flag.
when using B-APM. When using B-APM we ran a job that reads and writes 200 GB of data between workflow components on the same node to ensure caching does not affect performance. Benchmarks were compiled using the Intel 19 compiler with the -O3 flag.
 45% faster overall runtime (172 vs 309 s) for the workflow compared to using Lustre.
45% faster overall runtime (172 vs 309 s) for the workflow compared to using Lustre.Synthetic workflow benchmark using Lustre or B-APM in acompute node
Component | Target | Runtime (seconds) |
|---|---|---|
Producer | Lustre | 197 |
Consumer | Lustre | 112 |
Producer | B-APM | 133 |
Consumer | B-APM | 60 |
OpenFOAM workflow benchmark using Lustre or B-APM with data staging
Workflow phase | Lustre | B-APM |
|---|---|---|
Decomposition | 1352 | 1323 |
Data-staging | – | 51 |
Solver | 747 | 95 |
Application Workflow: OpenFOAM [35] is a C++ library that provides computational fluid dynamics functionality that can easily be extended and modify by users. It is parallelised with MPI and is heavily used in academia and industry for large scale computational simulations. It often requires multiple stages to complete a simulation, from preparing meshes and decomposing them for the required number of parallel processes, to running the solver and processing results. It also, often, undertakes large amounts of I/O, reading in input data and producing data for analysis. It is common that the different stages require differing amounts of compute resources, with some stages only able to utilise one node, and others (such as the solver) requiring a large number of nodes to complete in a reasonable amount of time. OpenFOAM generally creates a directory per process that will be used for the solver calculations, necessitating significant amounts of I/O operations for a large simulation. It is also often useful to save data about the state of the simulation every timestep or every few timesteps. Given these features, OpenFOAM is a good target for both workflow functionality and improved I/O performance through node-local I/O hardware.
To evaluate the performance of our architectures using OpenFOAM we ran a low-Reynolds number laminar-turbulent transition modeling simulation of the flow over the surface of an aircraft [34], using a mesh with  43 million mesh points. We decomposed the mesh over 20 nodes enabling 960 MPI processes to be used for the solver step (picoFOAM). The decomposition step is serial, takes 1105 s, and requires 30 GB of memory.
43 million mesh points. We decomposed the mesh over 20 nodes enabling 960 MPI processes to be used for the solver step (picoFOAM). The decomposition step is serial, takes 1105 s, and requires 30 GB of memory.
We ran the solver for 20 timesteps, and compared running the full workflow (decomposing the mesh and then running the solver) entirely using the Lustre filesystem or using node-local B-APM with data staging between the mesh decomposition step and the solver. The solver produces 160 GB of output data when run in this configuration, with a directory per process. Running the solver using Lustre required 747 s, whereas running the solver using node-local B-APM storage required 95 s, more than seven times faster (see Table 2). Using node-local storage needs a redistribution of data from the storage on the single compute node used for decomposing the mesh to the 20 nodes needed for the solver. This data copy took 51 s, so even if not overlapped with other running tasks this approach would provide improved performance compared to directly using Lustre, more so when run for a full simulation, which would require many thousands of timesteps meaning the initial cost of copying the data would be negligible.
10 node IOR performance using B-APM and GekkoFS
Benchmark | Bandwidth (GB/s) |
|---|---|
FPP write | 24 |
SF write | 3 |
FPP read | 27 |
SF read | 7 |
Table 3 presents the performance achieved using 10 nodes using the GekkoFS distributed filesystem exploiting B-APM. We can see that using a single file per process, read and write bandwidth as around 24–27 GB/s. The bandwidth achieved using a shared file for all processes is low, at 3 GB/s for write and 7 GB/s for read (the B-APM is slower for writing than it is for reading). However, these tests are run with a prototype version GekkoFS using only TCP/IP for communication between the nodes, and only the B-APM on a single socket per node meaning communication performance and NUMA effects have reduced the achieved performance.
6 Related Work
There are existing technological solutions that are offering similar functionality to B-APM and that can be exploited for high performance I/O. E.g. Memory mapped files, which allows copy files into main memory and therefore byte level CPU instructions to modify data. In fact, the use of B-APM by the PMDK library is based on the memory mapped file concept and therefore allows an easy transition from this well-known I/O handling into the B-APM future. The major difference with B-APM usage is that it does not perform any I/O operations, only memory operation, removing the requirement for context switches, buffers management, programming scatter/gather lists, I/O interrupt handling and wait for external I/O devices to complete and ensure persistence (e.g. msync). A pointer to the requested B-APM address space is all that is required for CPU instructions to operate on persistence memory, and the use of the cflush instruction to ensure persistence of data.
In comparison the NVMe protocol requires thousands of CPU instructions to read data from the device or to make data persistent. In addition, even the fastest NVMe devices such as Intel’s NVMe Optane SSD or Samsung Z-NAND require tens of microseconds to respond while B-APM based on DCPMM will respond in 100 s of nanoseconds. This is especially true for access to small amounts of data located at random data locations in memory. With larger amounts of data, the overall performance effect is smaller (the proportion of I/O operation on the total amount of data is smaller), but traditional I/O still necessitates copying to buffers and I/O page caches instead of working directly on the data. B-APM is a natural fit for CPU operations to manage persistent data compared to the device driven block I/O traditional storage media requires.
We are proposing hardware and systemware architectures in this work that will integrate B-APM into large scale compute clusters, providing significant I/O performance benefits and introducing new I/O and data storage/manipulation features to applications. Our key goal is to create systems that can both exploit the performance of the hardware and support applications whilst they port to these new I/O or data storage paradigms.
Indeed, we recognise that there is a very large body of existing applications and data analysis workflows that cannot immediately be ported to new storage hardware (for time and resource constraint reasons). Therefore, our aims in this work are to provide a system that enables applications to obtain best performance if porting work is undertaken to exploit B-APM hardware features, but still allow applications to exploit B-APM and significantly improve performance without major software changes.
7 Summary
This paper outlines a hardware and systemware architecture designed to enable the exploitation of B-APM hardware directly by applications, or indirectly by applications using systemware functionality that can exploit B-APM for applications. This dual nature of the system provides support for existing application to exploit this emerging memory new hardware whilst enabling developers to modify applications to best exploit the hardware over time.
The system outlined provides a range of different functionality. Not all functionality will be utilised by all applications, but providing a wide range of functionality, from filesystems to object stores to data schedulers will enable the widest possible use of such systems. We are aiming for hardware and systemware that enables HPC and HPDA applications to co-exist on the same platform.
Whilst the hardware is novel and interesting in its own right, we predict that the biggest benefit in such technology will be realised through changes in application structure and data storage approaches facilitated by the byte-addressable persistent memory that will become routinely available in computing systems.
In time it could possible to completely remove the external filesystem from HPC and HPDA systems, removing hardware complexity and the energy/cost associated with such functionality. There is also the potential for volatile memory to disappear from the memory stack everywhere except on the processor itself, removing further energy costs from compute nodes. However, further work is required to evaluate the impact of the costs of the active systemware environment we have outlined in this paper, and the memory usage patterns of applications.
Moving data asynchronously to support applications can potentially bring big performance benefits but the impact such functionality has on applications running on those compute node needs to be investigated. This is especially important as with distributed filesystems or object stores hosted on node distributed B-APM such in-node asynchronous data movements will be ubiquitous, even with intelligent scheduling algorithms. We have demonstrated significant performance improvements using B-APM for applications and synthetic benchmarks, showing 7–8x performance improvements for a I/O intensive CFD solver, even using the slower file-based, rather than byte-access, I/O functionality.
Acknowledgements
The NEXTGenIO project1 and the work presented in this paper were funded by the European Union’s Horizon 2020 Research and Innovation programme under Grant Agreement no. 671951. All the NEXTGenIO Consortium members (EPCC, Allinea, Arm, ECMWF, Barcelona Supercomputing Centre, Fujitsu Technology Solutions, Intel Deutschland, Arctur and Technische Universität Dresden) contributed to the design of the architectures.