8 Artificial Sensing: Prosthetic and Robotic Hands
The principal instrument we use to perceive the world haptically is our hands, and therefore understanding the haptic sense is intimately related to knowing how hands function, as discussed in chapter 2. The sensory and motor properties of the human hand are also relevant to the design of artificial devices such as prosthetic and robotic hands. In this chapter, we examine how prosthetic and robot hands have developed over the years, and the issues associated with imparting a sense of touch to them. Although the technology required for these two applications is fundamentally different, it is interesting to observe that haptic sensing remains a challenging prospect for both.
Because the human hand is the primary structure used to explore the world haptically, it is the standard against which artificial devices are often compared. For prosthetic hands, this makes sense, since the artificial hand is coupled to the body and can make use of the remaining sensory and motor capabilities of the amputated limb and of the higher cortical centers involved in the control of limb movements. There has also been a strong bias in the robotics community toward building anthropomorphic (human-like) robotic hands when dexterous manipulation is required or when it is envisaged that the robotic arm and hand will be controlled by a master device worn by a human operator.1 Of course, the 200 million years of evolutionary “R and D” that fine-tuned the properties of the human hand should not be overlooked. Nevertheless, as noted by the comparative anatomist Wood Jones, “it is not the hand that is perfect, but the whole nervous mechanism by which movements of the hand are evoked, co-ordinated and controlled.”2 For both prosthetic and robotic hands the benchmarks for performance are often derived from the human hand.
Prosthetic Hands
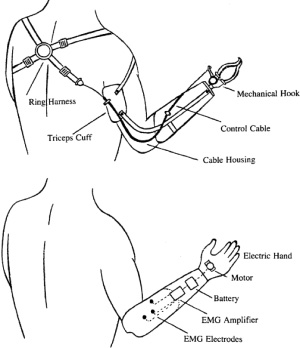
The development of artificial hands dates back many years. One of the first recorded prosthetic hands was that of the Roman general Marcus Sergius, who was fitted with an iron-made prosthesis after losing his hand during the second Punic war in 218 BCE. This enabled him to return to the battlefield, holding a shield in the prosthesis. In the sixteenth century, the French military surgeon Ambroise Paré designed and built an artificial hand that enabled different types of grasps as well as independent movement of the fingers, using a system of levers and gears. This prosthetic hand was controlled by movement of the opposite limb or the chest. Many years later, in the 1940s, body-powered prostheses were developed in response to the high incidence of war-related upper-extremity amputations. Body-powered prostheses are usually cable-driven via a harness that is strapped around the shoulder of the intact arm and then travels down the prosthetic arm to the end effector, which can be used to grasp objects. The end effector may be a mechanical hook or appendage that is shaped like a hand with one or two movable fingers (see figure 15). The cable control system uses movements and forces generated primarily by shoulder flexion and abduction to control the elbow joint and artificial hand. The orientation of the hand can be controlled by rotating a friction joint at the wrist using the intact hand. Since the majority of upper-extremity amputees have an intact arm, the prosthetic device is not usually used for very precise movements like picking up small objects, but mainly for stabilizing or positioning objects.
Despite their rather primitive structure, body-powered prostheses have remained popular over the years, partly because of their ease of use and the incidental kinesthetic feedback they provide. As the shoulder moves and the cable is pulled through the harness, users come to associate the extent of shoulder movement with the elbow angle in the prosthetic arm. Forces acting on the hand are in turn transmitted through the cable to the body and are perceived remarkably accurately, as reflected in the ability of amputees to duplicate small grasping forces using these devices.3 The disadvantages of body-powered prostheses are that the configuration of the harness often necessitates extreme body movements, such as rotating the torso in order to turn a heavy object, and that it is difficult to operate the end effector when it is positioned behind the back.
In the late 1940s and early 1950s we saw the development of prosthetic hands controlled by the electrical signals originating in the muscles in the stump of the amputated limb, called myoelectrically controlled hands. Electromyographic (EMG) activity was recorded with electrodes on the skin surface over the muscles within the residual limb, and used to control an electrically powered end effector (see figure 15). These systems varied with respect to the number of electrode sites used for control, the movements that could be executed by the prosthetic hand, and the feedback systems implemented. Although the movements executed by myoelectrically controlled prosthetic hands are considerably slower than those made by the intact hand, the maximum pinch forces they generate can equal, and for some devices exceed, those produced by the intact human hand.
Figure 15 Upper: Bowden cable control system with a mechanical hook. Lower: Myoelectrically controlled below-elbow prosthesis with an electromechanical hand actuated by EMG signals. From Billock (1986)4 with permission of the American Orthotic and Prosthetic Association.
Myoelectric prostheses are now used by many upper-extremity amputees in the developed world and are particularly useful for those with below-elbow amputations, for whom they have a high level of acceptance. They have a greater range of functional movement than cable-controlled systems and require less effort to operate. However, they are not faster than cable-driven systems, and for many activities of daily living they are slower. One of the major issues associated with their use is the absence of a sense of touch, which necessitates visually monitoring the prosthetic hand to ensure it is performing the required task. The dexterity with which these prosthetic hands are used at present does not arise from any inherent dexterity in the hand itself, but from the amputee, who uses visual cues and subtle changes in the sounds of motors or vibrations to guide the hand.
A considerable amount of research has been done on how to provide tactile and kinesthetic feedback to prosthetic hands, since the absence of such cues places a considerable burden on the user. Research efforts have focused on developing tactile sensors that can be attached to the prosthetic hand to detect contact, and displacement sensors that measure movements of the end effectors. Such sensors have to be durable and robust given the conditions under which they must operate. The signals from these sensors are then processed and presented to the user via electrodes connected to peripheral nerves in the residual limb. The feedback to the amputee may be via an implanted electrode cuff that encircles a nerve so that when electrical pulses are sent by a computer to the cuff, the user feels sensations at particular locations on the hand.5
It is clear that as yet there is no prosthesis that can simulate the function and sensibility of the human hand. A number of design constraints related to the acceptable size, weight, and shape of the prosthetic hand have limited the development of a versatile hand. With respect to the weight of a prosthetic arm, it is important to note that although a typical arm, from the midpoint of the humerus bone in the upper arm to the hand, weighs around 3 kg, a prosthetic arm that weighs in excess of 1 or 1.5 kg is considered too heavy to wear by most amputees. This means that less than half of the normal weight is available to a designer to replicate the performance capacities of the human hand. In addition, for users to find it acceptable any control system implemented has to be relatively easy to learn to use, and once mastery is acquired, the prosthetic hand cannot require a high level of concentration to operate.
Recent research on the development of fluidically powered soft actuators opens up exciting possibilities for the future of prosthetic hands. This technology enables deformable digits with embedded tactile sensors to be fabricated for prosthetic hands. These devices have powerful motors and versatile sensing capabilities, as reflected in their capacity to resolve different shapes and surface textures.6 They are capable of conforming to surfaces or objects and can incorporate rigid elements for structural support or for the integration of components. The use of soft and deformable materials such as these actuators is pushing the boundaries of robotics technologies and their potential areas of application.
Robotic Hands
The human hand has often been used as the “gold standard” when designing robotic hands because of its dexterity and remarkable sensory capabilities.1 In many situations, robotic hands use the same tools and manipulate the same objects as human hands and may be controlled remotely by human operators. Anthropomorphic robotic hands therefore make sense in terms of ease of use and controllability. As noted in chapter 1, the human hand is controlled by 38 muscles, has 21 degrees of freedom of movement, and has thousands of sensors embedded in the skin and muscles that provide information about contact, interaction forces, temperature, and vibration. The fingers can work together in close proximity and even overlap each other if needed. Most of the major muscles that control finger movements reside in the forearm, which results in a very compact structure that significantly reduces the mass of the hand itself and provides an impressive workspace for each digit. Replicating these capabilities in a robotic hand is a formidable engineering and scientific challenge, particularly given the constraints on size and mass.
A large variety of robotic hands have been developed over the years, ranging from those that are now used extensively in industry, with claw-like grippers that can grasp objects and perform simple manipulations or highly repetitive actions, to anthropomorphic hands with a number of articulated fingers, capable of grasping and manipulating a diverse range of objects. The latter were initially built as research tools to advance our understanding regarding the control and design of multifingered hands. There are now commercially available robotic hands (e.g., the Barrett hand)7 that incorporate many of the features of these early research prototypes in a single hand that has the flexibility to operate in a variety of domains. Their use extends from handling hazardous materials, such as nuclear and biohazardous waste, to remote manipulation and parts assembly.
Dexterous robotic hands are typically powered using high-torque, low-mass brushed DC motors, and have three or four articulated fingers, often with one digit placed in opposition to the other fingers (like a thumb) to enable stable grasping. Each finger has three or four degrees of freedom of movement, and in some designs a digit can rotate around a base to enable a greater range of grips. Force/torque and displacement sensors measure the forces produced and movements of the joints. Precision measurement of joint angles allows the accuracy with which the position of robotic fingers can be controlled to exceed that of human fingers. In addition, a few of these hands are capable of moving considerably faster than their human counterparts. Some of the earlier robotic hands, like the Utah/MIT hand designed and built in the 1980s, were developed with the objective of using them in teleoperated environments, and so various types of force-reflecting hand masters (i.e., haptic displays) were built concurrently. Such systems have the advantage that task planning and correcting for errors are the responsibility of the human controlling the hand master. This makes the robotic device computationally less expensive since the controller need not be included in the device.
A more recent example of such a teleoperated system that has achieved commercial success is the da Vinci Surgical System (Intuitive Surgical, Inc.). With this robotic device, a surgeon uses a telemanipulator to perform movements, which are reproduced by robotic arms holding surgical instruments that operate on a patient.8 In this system, any undesirable features, such as tremor in the surgeon’s hands, can be filtered out. The precision with which such movements can be executed and controlled by the robotic arms surpasses that of the surgeon. The da Vinci Surgical System does not at present include any tactile or haptic feedback, although there is ongoing research on how best to incorporate these features in its design.
The recent growth in soft robotics technologies and devices has engendered a new class of robotic hands and grippers that exploit the inherent compliance of the materials to create adaptable systems.9 Soft grippers can readily deform to the shape of the object being grasped, so they are able to hold a much greater range of objects than rigid grippers can. Similarly, variable-stiffness technologies, in which granular material encased in an elastic membrane can change from very soft to completely stiff when a vacuum is applied, have been used to create grippers that adapt to the shape of objects and then alter their stiffness to hold them securely. Because these soft-body robots are able to stretch, squeeze, and change shape, they open new avenues of application for robotics and human-robot interactions.
Effective grasping by robotic hands requires sensing the contact conditions on the hand, as with human hands, and so tactile sensors that measure pressure and skin deformation are important to their functionality. There have been substantial advances in tactile sensing technology over the past 20 years, and this is reflected in the sensing capabilities of robot hands. However, the development of robotic tactile sensors has not matched the level of sophistication of robotic visual systems, which are used widely in industrial and mobile robot applications. A variety of technologies have been used to create tactile sensors, including capacitive, magnetic, piezoresistive, piezoelectric, and optical, each of which has advantages and limitations. One of the main limitations of many of these sensors is their fragility. When they are attached to fingertips they must be sufficiently robust to withstand the repeated impacts and abrasions associated with making contact with and manipulating objects made from a variety of materials.
The focus in many applications of robotic tactile sensing has been on detecting contact and movement during manipulation of an object, and measuring the distribution of normal and tangential forces across the hand.10 For rigid grippers and robotic hands, tactile array sensors distributed across the fingers and palm enable the contact force and area to be measured and controlled, which is important for detecting slippage of objects and for monitoring interaction forces. In contrast to the speed and accuracy of robotic finger movements, which surpass those of the human hand, the tactile sensing capabilities of all robotic hands are still markedly inferior to those of the human hand. The development of multipurpose sensors that can be embedded in compliant artificial skin surfaces remains a technological challenge to the field of robotic tactile sensing. The soft materials and deformable structures being developed for soft robots require novel approaches to providing sensing capabilities. The emergence of flexible and stretchable electronics and sensors offers exciting opportunities for enhancing tactile sensing in robotic hands.