MÖBIUS TRANSFORMATIONS
23. THE GROUP PROPERTY OF MOBIUS TRANSFORMATIONS
It follows from Theorems 4.3 and 4.4 that the rational function of order 1, i. e., the fractional linear transformation or Möbius transformation
![]()
is the only rational function which maps the extended plane onto itself in a one-to-one fashion. Here, we assume that the quantity ad — bc, called the determinant of the function L(z), is nonzero, since otherwise L(z) is identically equal to a constant mapping the extended plane into a single point. As we know from Sec. 17, the mapping w = L(z) is conformal at all points of the extended plane. This mapping (or its various special cases) plays an important role in a variety of problems encountered in the theory of functions of a complex variable, and it therefore merits a detailed study (to which we devote the present chapter).
Let ![]() denote the set of all Möbius transformations. Two such transformations
denote the set of all Möbius transformations. Two such transformations
![]()
are regarded as identical if and only if L1(z) = L2(z) for all z.
THEOREM 5.1 A necessary and sufficient condition for the two Möbius transformations (5.1) to be identical is that
![]()
Proof. The sufficiency of the condition is obvious. To prove the necessity, suppose L1(z) ≡ L2(z). Then, in particular,
![]()
which means that1
![]()
Substituting
![]()
into the second of the equations (5.3), we obtain
![]()
or
![]()
But q ≠ p, since otherwise
![]()
contrary to hypothesis, and therefore
![]()
Together with (5.3), this implies (5.2), as required.
Remark. A Möbius transformation is not characterized by the value of its determinant, since the determinant is multiplied by λ2 when the coefficients change as described by (5.2). It can only be asserted that the determinant remains nonzero under any substitution (5.2).
![]()
which obviously belongs to the set ![]() , is called the unit transformation (or the identity transformation). By the inverse of a given transformation
, is called the unit transformation (or the identity transformation). By the inverse of a given transformation
![]()
we mean the transformation which assigns to each w its inverse image z under the transformation (5.4). Thus the transformation
![]()
(whose coefficients are unique only to within a multiplicative constant, as in Theorem 5.1) is the inverse of the transformation (5.4), We denote the inverse of the transformation L by L–1.
Given two arbitrary Möbius transformations
![]()
we define the product of L1 and L2 as the result of first carrying out one transformation and then carrying out the other. There are two possible products corresponding to the two orders in which the transformations can be carried out. One product, written L1 L2(z), equals
and the other, written L1L2(z), is obtained from (5.5) by permuting the indices 1 and 2. Moreover, since
![]()
each of the transformations L1L2(z) and L2L1(z) belongs to the set ![]() . In general L1L2(z) ≠ L2L1(z), but obviously
. In general L1L2(z) ≠ L2L1(z), but obviously
![]()
and
![]()
for any L(z) ∈ ![]() .
.
Example. If
![]()
then
![]()
Multiplication of transformations, as just defined, is an associative operation, i.e.,
![]()
To see this, we merely write z3 = L3(z), and then both sides of (5.6) reduce at once to L1L2(z3). This associative property generalizes immediately to the product of an arbitrary number of transformations, and makes it unnecessary to use parentheses when writing products. For example, we have
![]()
Thus we have shown that the set ![]() of Möbius transformations has the following properties:2
of Möbius transformations has the following properties:2
1. ![]() is closed under multiplication, i.e., if L1∈
is closed under multiplication, i.e., if L1∈ ![]() , L2 ∈
, L2 ∈ ![]() , then L1L2∈
, then L1L2∈ ![]() , L2L1∈
, L2L1∈ ![]() .
.
2. Multiplication is associative.
3. There is an element U ∈ ![]() such that LU = UL = L for any L ∈
such that LU = UL = L for any L ∈ ![]() .
.
4. For each L ∈ ![]() , there is an element L–1 ∈
, there is an element L–1 ∈ ![]() such that LL–1 = L–1L = U.
such that LL–1 = L–1L = U.
In algebraic language, these four properties are summarized by saying that ![]() is a group of transformations3.
is a group of transformations3.
Problem. Prove that the Möbius transformations of the special form
form a group.
Comment. This fact is summarized by saying that the transformations (5.7) are a subgroup of ![]() .4
.4
24. THE CIRCLE-PRESERVING PROPERTY OF MÖBIUS TRANSFORMATIONS
We now prove that any Möbius transformation carries a straight line or a circle into another straight line or circle. We call this the circle-preserving property, since a straight lines can be regarded as a limiting case of a circle (corresponding to infinite radius). The entire linear transformation L(z) = αz + β(α ≠ 0) is obviously circle-preserving, since the mapping w = L(z) is just a shift (if α = 1), or a shift combined with a rotation and a uniform magnification (if α ≠ 1).
LEMMA. The transformation
![]()
is circle-preserving.
Proof. The equation of any straight line or circle in the z-plane can be written in the form
![]()
where we have a straight line if A = 0 and at least one of the numbers B, C is nonzero, and a circle if A ≠ 0 and B2 + C2 — AD > 0. Since
![]()
where ![]() = x — iy is the complex conjugate of z = x + iy, we can rewrite (5.9) as
= x — iy is the complex conjugate of z = x + iy, we can rewrite (5.9) as
![]()
where E = B + iC. It is easy to see that equation (5.10), where A and D are real and E is complex, is the equation of a straight line if and only if A = 0, E ≠ 0, and the equation of a circle if and only if A ≠ 0, E![]() – AD > 0.
– AD > 0.
We now find the image of the curve with equation (5.10) under the transformation (5.8). Replacing z by 1/w in (5.10), we obtain
![]()
or
![]()
Equation (5.11) has the same form as equation (5.10), with D, ![]() and A substituted for A, E and D, respectively. It follows that (5.11) is the equation of a straight line if D = 0, since then either A = 0 and E ≠ 0 if (5.10) is the equation of a straight line, or else A ≠ 0 and E
and A substituted for A, E and D, respectively. It follows that (5.11) is the equation of a straight line if D = 0, since then either A = 0 and E ≠ 0 if (5.10) is the equation of a straight line, or else A ≠ 0 and E![]() — AD = E
— AD = E![]() > 0 (so that E ≠ 0 again) if (5.10) is the equation of a circle. Moreover, (5.11) is the equation of a circle if D ≠ 0, since then either A ≠ 0 and E
> 0 (so that E ≠ 0 again) if (5.10) is the equation of a circle. Moreover, (5.11) is the equation of a circle if D ≠ 0, since then either A ≠ 0 and E![]() — AD > 0 if (5.10) is the equation of a circle, or else A = 0 and E ≠ 0 (so that E
— AD > 0 if (5.10) is the equation of a circle, or else A = 0 and E ≠ 0 (so that E![]() — AD = E
— AD = E![]() > 0 again) if (5.10) is the equation of a straight line.
> 0 again) if (5.10) is the equation of a straight line.
THEOREM 5.2. Every Möbius transformation
![]()
is circle-preserving.
Proof. If c = 0, (5.12) reduces to an entire linear transformation and hence is circle-preserving. If c ≠ 0, (5.12) can be written in the form
![]()
![]()
Setting
![]()
we can write L(z) as a product
![]()
of three transformations which are all circle-preserving (use the lemma). It follows that L itself is circle-preserving.
COROLLARY. Let δ = —d/c be the pole of the (rational) function (5.12). Then (5.12) transforms every straight line or circle which passes through δ into a straight line, and every other straight line or circle into a circle.
Proof. If the circle or straight line passes through δ, its image under (5.12) contains the point at infinity, and hence must be a straight line, since it cannot be a circle (no circle contains ∞). Similarly, if the circle or straight line does not pass through δ, its image does not contain the point at infinity, and hence must be a circle, since it cannot be a straight line (every straight line contains ∞).
Remark. Let w = L(z) be any Möbius transformation, let γ be a straight line or circle in the z-plane, and let Γ = L(γ) be the image of γ in the w-plane (Γ is itself a straight line or a circle). The two domains G1 and G2 with boundary γ are either two half-planes or the interior and exterior of a circle. Let L(G1) and L(G2) be the images of these two domains under the mapping w = L(z). We now show that L(G1) and L(G2) are the two domains whose common boundary is the curve Γ.
First suppose z1 ∈ Gl, z2 ∈ G2, and let w1 = L(z1), w2 = L(z2). Then w1 ∉ Γ, w2 ∉ Γ, since z1 ∉ γ, z2 ∉ Γ, and hence w1 and w2 must belong to the union of the two (disjoint) domains into which Γ divides the extended w-plane. If w1 and w2 both belong to one of these two domains, we can join w1 to w2 by a line segment or circular arc Δ which does not intersect Γ (see Figure 5.1). The inverse image of Δ in the z-plane must be a line segment or circular arc δ, which joins z1 to z2 and does not intersect γ. But the existence of δ contradicts the assumption that z1 and z2 belong to different domains G1 and G2. Therefore, if z1 and z2 belong to different domains with boundary γ, their images w1 and w2 must belong to different domains with boundary Γ.
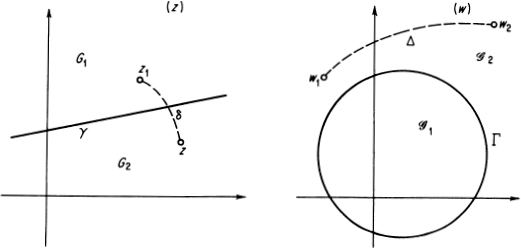
FIGURE 5.1
We now denote the domains containing w1 and w2 by ![]() and
and ![]() , respectively. If z is an arbitrary point in G1 then, since z and z2 belong to different domains and G1 and G2. their images w and w2 belong to different domains
, respectively. If z is an arbitrary point in G1 then, since z and z2 belong to different domains and G1 and G2. their images w and w2 belong to different domains ![]() and
and ![]() . But w2 ∈
. But w2 ∈ ![]() , and hence w ∈
, and hence w ∈ ![]() , i.e., L(z) ∈
, i.e., L(z) ∈ ![]() if z ∈ G1. Similarly, L(z) ∈
if z ∈ G1. Similarly, L(z) ∈ ![]() if z ∈ G2, and hence
if z ∈ G2, and hence
![]()
Conversely, let w be an arbitrary point in ![]() . Then w must be the image of a point z in G1 or G2. But z ∈ G2 implies w ∈
. Then w must be the image of a point z in G1 or G2. But z ∈ G2 implies w ∈ ![]() , contrary to hypothesis, and hence z ∈ Gl, i.e.,
, contrary to hypothesis, and hence z ∈ Gl, i.e., ![]() ⊂ L(G1). Similarly, we find that
⊂ L(G1). Similarly, we find that ![]() ⊂ L(G2). It follows by comparison with (5.13) that
⊂ L(G2). It follows by comparison with (5.13) that
![]()
i.e., the two domains with boundary Γ are just the images of the two domains G1 and G2, as asserted. Moreover, to determine which of the two domains with boundary Γ is actually the image of a given domain G1 with boundary γ, it is sufficient to locate the image w1 of any point z1 ∈ G1, for then the domain ![]() containing w1 is the image of G1.
containing w1 is the image of G1.
Problem. Find the images of the following domains under the indicated Möbius transformations:
25. FIXED POINTS OF A MÖBIUS TRANSFORMATION. INVARIANCE OF THE CROSS RATIO
By a fixed point of a transformation or mapping w = f(z), we mean a point which is carried into itself by the transformation. Obviously, every such point is a solution of the equation
![]()
Moreover, every point of the z-plane is trivially a fixed point of the unit transformation U(z) = z.
THEOREM 5.3. Every Möbius transformation different from the unit transformation has two fixed points, which in certain cases coalesce into a single fixed point.
Proof. First let c = 0 (d ≠ 0), so that L(z) reduces to the entire linear transformation
![]()
Then, since L(∞) = ∞, one fixed point is the point at infinity. If α ≠ 1, there is another fixed point determined from the equation
![]()
i. e., the point β/(1 — α), but if α = 1, β ≠ 0, there is no finite fixed point. Moreover, if α ≠ 1, β ≠ 0, the finite fixed point β/(1 — α) approaches ∞ as α → 1. Therefore, in the case of the transformation
![]()
the point at infinity can be regarded as two fixed points which have coalesced.
Now let c ≠ 0, so that
![]()
i. e., the point at infinity is not a fixed point5. Similarly, the pole δ = –d/c of the transformation is not a fixed point, since
![]()
Assuming that z ≠ ∞ and z ≠ δ, we solve the equation
![]()
or
![]()
obtaining
![]()
If (a — d)2 + 4bc ≠ 0, we obtain two different finite fixed points; if (a — d)2 + 4bc = 0, these two points coalesce to form a single finite fixed point (a — d)/2c.
COROLLARY. The only Möbius transformation with more than two fixed points is the unit transformation U(z) = z, for which all points are fixed points.
THEOREM 5.4. A sufficient condition for two Möbius transformations L(z) and ∧(z) to be identical is that the equation
![]()
hold for three distinct points z1, z2 and z3. In particular, there cannot exist two distinct Möbius transformations taking three given values w1, w2, w3 at three given distinct points z1, z2, z3.
![]()
that
![]()
and hence
![]()
Therefore the transformation ∧–1L has three distinct fixed points, which, according to the corollary, implies
![]()
where U is the unit transformation. Multiplying both sides of (5.14) by ∧ from the left, we obtain
![]()
which implies
![]()
as asserted.
We now set about determining the (unique) Möbius transformation w = L(z) carrying the points z1, z2, z3 into the points w1, w2, w3. First we consider the problem of finding the special Möbius transformation w = ∧(z) carrying three finite points zl, z2, z3 into the points 0, ∞, 1. Since the function
![]()
vanishes for z = z1 and becomes infinite for z = z2 if and only if z1 is a zero of the numerator and z2 is a zero of the denominator, it follows that
![]()
But w must equal 1 for z = z3, i.e.,
![]()
which implies6
![]()
Therefore the Möbius transformation carrying z1, z2, z3 into 0, ∞, 1 is
![]()
Next we determine the more general Möbius transformation w = L(z) satisfying
![]()
where w1, w2, w3 are three arbitrary (but distinct) finite points. As we have just seen, the transformation
![]()
carries the points wl, w2, w3 into the points 0, ∞, 1. Therefore the transformation ∧1L carries the points z1, z2, z3 into the points 0, ∞, 1, so that
![]()
Multiplying both sides of the equation
![]()
by ∧–11 from the left, we obtain
![]()
This solves the problem, since the functions ∧(z) and ∧1(z), and hence ∧–11(z), are known [cf. (5.17) and (5.16)]. However, it is more convenient to use (5.18) directly, after writing w = L(z). The result is
![]()
or
![]()
which expresses the Möbius transformation w = L(z) in implicit form.
Remark. In finding the Möbius transformation carrying the points z1, z2, z3 into the points w1, w2, w3, it was assumed that all six points are finite. However, the case of infinite points is easily handled. For example, the transformation carrying the points ∞, z2, z3 into the points 0, ∞, 1 has the form
![]()
which can be found by inspection or by writing (5.15) in the form
and then taking the limit as z1 → ∞. Therefore (5.19) is replaced by
![]()
where it is assumed that the points w1, w2, w3 are finite. Similarly, the transformation carrying the points z1, ∞, z3 into the points 0, ∞, 1 has the form
![]()
and hence we have
![]()
instead of (5.19). Finally, the transformation carrying the points z1, z2, ∞ into the points 0, ∞, 1 has the form
![]()
and hence we have
![]()
instead of (5.19).
In just the same way, we have to replace the left-hand side of (5.19) by
![]()
depending on whether w1 = ∞, w2 = ∞ or w3 = ∞. As a result, we arrive at the following mnemonic rule: If zk = ∞ or wl = ∞ (k, l = 1, 2, 3), the differences involving zk or wl have to be replaced by 1. The reader can easily verify this rule by taking the appropriate limits (as zk → ∞ or wl → ∞) in equation (5.19).
Equation (5.19) implies an important general property of Möbius transformations. If a, b, c and d are arbitrary distinct finite complex numbers, then the ratio
![]()
denoted by (a, b, c, d), is called the cross ratio (or anharmonic ratio) of the four numbers (or points) a, b, c and d. If one of the four points a, b, c, d is the point at infinity, we define the cross ratio as the limit of the cross ratio of four finite points, three of which coincide with the three given finite points, as the fourth point approaches infinity. Thus, according to this definition, we have
Now let w = L(z) be an arbitrary Möbius transformation, and let A, B, C, D be the points into which L(z) maps four arbitrary (but distinct) points a, b, c, d. Since the points A, B and D are the images of the points a, b and d, it follows from (5.19) that the relation between z and w = L(z) is given by
![]()
where differences involving the point at infinity have to be replaced by 1. Moreover, since the point C is the image of the point c, we have
![]()
(where again differences involving the point at infinity have to be replaced by 1), or equivalently
![]()
In other words, the cross ratio of any four distinct points is invariant under a Möbius transformation.
Problem 1. Prove that every Möbius transformation w = L(z) with a single finite fixed point z0 satisfies a relation of the canonical form
![]()
Problem 2. Prove that every Möbius transformation w = L(z) with two distinct finite fixed points z1 and z2 satisfies a relation of the canonical form
![]()
Problem 3. Suppose the Möbius transformation L(z) has two distinct finite fixed points z1 and z2. Prove that
![]()
Hint. Use the preceding problem.
Problem 4.Find the Möbius transformation which carries the points – 1, i, 1 + i into the points
a) 0, 2i, 1 – i; b) i, ∞, 1.
Ans. ![]()
Problem 5. Find the Möbius transformation which carries the points —1, ∞, i into the points
a) i, 1, 1 + i; b) ∞, i, 1; c) 0, ∞, 1.
Ans. ![]()
Problem 6. Find the Möbius transformation such that
a) The points 1 and i are fixed, but the point 0 goes into the point – 1;
b) The points ![]() and 2 are fixed, but the point
and 2 are fixed, but the point ![]() goes into ∞;
goes into ∞;
c) The point i is the only fixed point and the point 1 goes into ∞.
![]()
26. MAPPING OF A CIRCLE ONTO A CIRCLE7
Using the circle-preserving property of Möbius transformations and the possibility of mapping any given triple of distinct points z1, z2, z3 into any other given triple of distinct points w1, w2, w3, we obtain the following basic
THEOREM5.5. Let γ and Γ be any two straight lines or circles, and let z1, z2, z3 and w1, w2, w3 be any two triples of distinct points belonging to γ and Γ, respectively. Then there exists a Möbius transformation w = L(z) mapping γ onto Γ in such a way that
![]()
Proof. Construct the Möbius transformation w = L(z) satisfying the conditions (5.20), which according to Theorem 5.4 and the subsequent construction, exists and is unique. According to Theorem 5.2, w = L(z) maps the straight line or circle γ onto another straight line or circle Γ*. But since γ goes through the points z1, z2 and z3, Γ* must go through the points w1, w2 and w3. Moreover, since two different straight lines or circles cannot be drawn through the same three points, Γ* must coincide with Γ, as asserted.
Remark. Again consider two arbitrary straight lines or circles γ and Γ (which may coincide). Let G be one of the two domains with boundary γ, and let ![]() be one of the two domains with boundary Γ, so that G is either a half-plane, the interior of a circle or the exterior of a circle, and the same is true of
be one of the two domains with boundary Γ, so that G is either a half-plane, the interior of a circle or the exterior of a circle, and the same is true of ![]() . We now show how to map G onto
. We now show how to map G onto ![]() . Choose an arbitrary triple of distinct points z1, z2, z3 on γ, and suppose an observer moving along γ in the direction from z1 to z3 through z2 finds the domain G on his left, say. Next choose a triple of distinct points w1, w2, w3 on Γ such that an observer moving along Γ in the direction from w1 to w3 through w2 finds the domain
. Choose an arbitrary triple of distinct points z1, z2, z3 on γ, and suppose an observer moving along γ in the direction from z1 to z3 through z2 finds the domain G on his left, say. Next choose a triple of distinct points w1, w2, w3 on Γ such that an observer moving along Γ in the direction from w1 to w3 through w2 finds the domain ![]() on his left, but let w1, w2, w3 be otherwise arbitrary. As in Theorem 5.5, we form the Möbius transformation w = L(z) which satisfies the conditions (5.20) and hence maps γ onto Γ. Then w = L(z) also maps G onto
on his left, but let w1, w2, w3 be otherwise arbitrary. As in Theorem 5.5, we form the Möbius transformation w = L(z) which satisfies the conditions (5.20) and hence maps γ onto Γ. Then w = L(z) also maps G onto ![]() , i.e.,
, i.e., ![]() = L(G). In fact, if δ is a segment of the normal to the curve γ drawn from the point z2 and pointing into the interior of G, so that an observer at z2 facing in the direction established on γ finds δ on his left, then, since the mapping w = L(z) is conformal, an observer at w2 facing in the direction established on Γ will also find the image Δ = L(δ), which is a line segment or circular arc, on his left (see Figure 5.2.)8 Therefore Δ ∩
= L(G). In fact, if δ is a segment of the normal to the curve γ drawn from the point z2 and pointing into the interior of G, so that an observer at z2 facing in the direction established on γ finds δ on his left, then, since the mapping w = L(z) is conformal, an observer at w2 facing in the direction established on Γ will also find the image Δ = L(δ), which is a line segment or circular arc, on his left (see Figure 5.2.)8 Therefore Δ ∩ ![]() ≠ 0 and hence
≠ 0 and hence ![]() contains images of certain points belonging to G (i.e., points of the segment δ). But, according to the remark on pp. 94–96, L(G) is one of the two domains with boundary Γ = L(γ), in fact just the domain containing the image of any point in G. In other words
contains images of certain points belonging to G (i.e., points of the segment δ). But, according to the remark on pp. 94–96, L(G) is one of the two domains with boundary Γ = L(γ), in fact just the domain containing the image of any point in G. In other words ![]() = L(G), as asserted.
= L(G), as asserted.
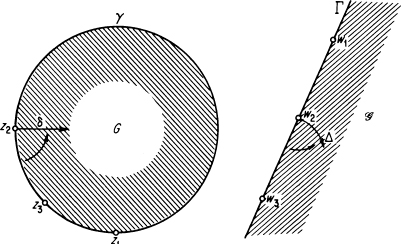
FIGURE 5.2
Example. Find a conformal mapping of the upper half plane Im z > 0 onto the interior of the unit circle.
To solve this problem, we choose z1 = — 1, z2 = 0, z3 = 1, say, so that the upper half-plane is on the left of an observer moving along the real axis in the direction from z1 to z3 through z2. We also choose three points w1, w2, w3 on the unit circle, such that the interior of the circle is on the left of an observer moving along the circle in the direction from w1 to w3 through w2. For simplicity, let w1 = 1, w2 = i, w3 = — 1. Then the desired Möbius transformation satisfies the conditions L(zk) = wk, k = 1, 2, 3 and can be represented in the form
![]()
or
![]()
where we have used (5.19).
Problem. Find the Möbius transformation w = L(z) mapping the upper half-plane Im z > 0 onto itself and satisfying the conditions w(0) = 1, w(l) = 2, w(2) = ∞.
27. SYMMETRY TRANSFORMATIONS
Let z1 and z2 be two points which are symmetric with respect to a given straight line γ, i.e., such that γ is the perpendicular bisector of the line segment joining z1 and z2. By definition, the straight line passing through z1 and z2 is orthogonal to γ. Moreover, the center of any circle δ passing through z1 and z2 lies on γ, and hence δ is also orthogonal to γ. It is easy to see that the converse is true as well, i.e., if every straight line or circle passing through a pair of points z1 and z2 is orthogonal to a given straight line γ, then z1 and z2 are symmetric with respect to γ. Generalizing the concept of symmetry with respect to a straight line, we introduce the following definition: Two points z1 and z2 are symmetric with respect to a given circle γ if and only if every straight line or circle passing through z1 and z2 is orthogonal to γ.
THEOREM 5.6. Let z1 and z2 be any two points symmetric with respect to a given straight line or circle γ, and let w = L(z) be any Möbius transformation. Then the points w1 = L(z1) and w2 = L(z2) are symmetric with respect to the straight line or circle Γ = L(γ)9.
Proof. We have to show that an arbitrary straight line or circle Δ passing through w1 and w2 is orthogonal to Γ. Let z = L–1(w) be the inverse of the transformation w = L(z). Clearly, L–1 is also a Möbius transformation, and
![]()
Moreover, δ = L–1(Δ) is a straight line or circle passing through z1 and z2. Since z1 and z2 are symmetric with respect to γ, by hypothesis, it follows that δ is orthogonal to γ. But then, since the mapping w = L(z) is conformal, Δ = L(δ) is orthogonal to Γ, and the proof is complete.
COROLLARY. There is only one point z2 symmetric to a given point z1 with respect to a given straight line or circle γ.
Proof. If γ is a straight line, the statement is obvious. Thus let γ be a circle, and suppose that besides z2, there is another point z′2 ≠ z2 symmetric to z1 with respect to γ. Choosing a Möbius transformation w = L(z) mapping γ onto a straight line Γ, we find that w2 = L(z2) and w′2 = L(z′2) are two distinct points symmetric with respect to Γ, which is impossible.
Remark. Suppose w = L(z) maps a straight line or circle γ onto a circle Γ with center w1, and let z1 be the inverse image of w1. Then the point z2 symmetric to z1 with respect to γ must be mapped into the point at infinity. To see this, we note that w2 = ∞ is symmetric to w1 with respect to the circle Γ, since any straight line or circle passing through 0 and ∞, i.e., any straight line passing through the center of Γ, is orthogonal to Γ. The uniqueness of w2 follows from the corollary.
Let γ be an arbitrary straight line or circle. A transformation of the extended plane into itself, which carries each point z into the point z* symmetric to z with respect to γ is called a symmetry transformation with respect to γ or a reflection in γ. In the case where γ is a circle, the transformation is also called an inversion in γ. We now derive analytical expressions for symmetry transformations.
First let γ be a straight line with an assigned direction, and consider reflection in γ. The straight line γ is completely characterized by one of its points a and by the unit vector
![]()
pointing in the direction of γ. Suppose we carry out the entire linear transformation
![]()
which obviously maps the real axis onto γ, since (5.21) corresponds to a shift by the vector a (carrying the origin of coordinates into the point a), followed by a rotation through the angle θ about the point a. Since the inverse transformation w = L–1(z) maps γ onto the real axis, it maps every pair of points z and z* symmetric with respect to γ into a pair of points w and w* symmetric with respect to the real axis. But the points w and w* are represented by two conjugate complex numbers, i.e.,
![]()
Therefore z — a = τt, and
![]()
Eliminating t from (5.23), we obtain
![]()
According to (5.24), reflection in a straight line γ going through a point a at an angle θ with the real axis can be accomplished by first constructing the vector ![]() which is the reflection of the vector z — a the real axis, and then rotating
which is the reflection of the vector z — a the real axis, and then rotating ![]() through the angle 2θ about the point a.
through the angle 2θ about the point a.
Next let γ be a circle, and consider inversion in γ. Let R (0 < R < ∞) be the radius and a the center of γ. We begin by finding a Möbius transformation which maps γ onto the real axis. The simplest approach is to choose the transformation
![]()
which maps the three points w1 = — 1, w2 = 0, w3 = 1 of the real axis into the points z1 = a — iR, z2 = a + R, z3 = a + iR of the circle γ. The inverse transformation w = L–1(z) maps γ onto the real axis, and maps every pair of points z and z* symmetric with respect to γ into a pair of points w and w* symmetric with respect to the real axis. As before, the points w and w* are represented by two conjugate complex numbers (5.22). Therefore
![]()
and
![]()
Multiplying the two equations (5.25), we obtain
![]()
or
![]()
In particular, it follows from (5.26) that
![]()
and
![]()
Therefore the points z and z* lie on the same ray emanating from the center of γ, and the product of their distances from the center of γ equals the square of the radius of γ. These two conditions, equivalent to formula (5.26), determine the position of one of the points z, z* with respect to the other, and completely characterize the operation of inversion in the circle γ with equation |z — a| = R.
Remark. We note that any symmetry transformation reduces to consecutive application of a linear transformation (entire or fractional), followed by reflection in the real axis. In fact, according to (5.24), reflection in a straight line can be represented in the form
![]()
while, according to (5.26), reflection in a circle can be represented in the form
![]()
Since any Möbius transformation is conformal and circle-preserving, and since reflection in the real axis has the same properties, except that while preserving the magnitudes of angles it reverses the directions in which they are measured, we see that the most general symmetry transformation is a conformal mapping of the second kind (see p. 57) which is also circle- preserving.
Problem 1. Find the point symmetric to the point 2 + i with respect to
a) The circle |z| = 1; b) The circle |z — i| = 3.
Problem 2. Invert each of the following curves in the unit circle:
![]()
g) The boundary of the triangle with nonzero vertices z1, z2, z3.
28. EXAMPLES
We now give two examples illustrating the use of the symmetry-preserving property of Möbius transformations.
Example 1. Find a conformal mapping of the upper half plane ∏ U: Im z > 0 onto the disk K: |w| < R, such that a given point α ∈ ∏ U is mapped into the center of K.10
Any such mapping
![]()
provided it exists, vanishes for z = α, and hence α is the zero of L(z). But the point ![]() symmetric to α with respect to the real axis must be mapped into the point symmetric to the center w = 0 of K with respect to the boundary of K, i.e., the circle C: |w| = R. Therefore
symmetric to α with respect to the real axis must be mapped into the point symmetric to the center w = 0 of K with respect to the boundary of K, i.e., the circle C: |w| = R. Therefore ![]() must be mapped into the point at infinity (see the remark on p. 105), so that L(
must be mapped into the point at infinity (see the remark on p. 105), so that L(![]() ) = ∞ and
) = ∞ and ![]() is the pole of L(z). It follows that L(z) has the form
is the pole of L(z). It follows that L(z) has the form
![]()
where λ is a nonzero complex number.
We now show that (5.27) maps ∏U onto K, with z = α going into w = 0, if we choose |λ| = R. Since L(α) = 0 for any λ, by construction, it is sufficient to show that (5.27) maps the real axis onto the circle C. If z = x is an arbitrary real number, then x — α and x — ![]() are complex conjugates, and hence
are complex conjugates, and hence
![]()
Therefore (5.27) maps the real axis into C. But since any three distinct points of the real axis are mapped into three distinct points of C, it follows from Theorem 5.5 that the real axis is mapped onto C.
In (5.27) the argument of λ is left unspecified. The geometric reason for this indeterminacy is clear: Going from one value of λ to another in (5.27), while keeping |λ| = R fixed, is equivalent to changing the arguments of all points w by the same quantity, i.e., to rotating the disk K about its center w = 0. Such a rotation transforms K into itself while leaving its center fixed, and hence does not violate the conditions of the problem. Thus, if the problem is to have a unique solution, we must impose an extra condition on L(z). For example, we might require either that
1. A given point x = x0 of the real axis should go into the point w = R of the circle C, or that
2. The derivative L′(α) should be a positive real number. (Geometrically, this means that the mapping does not change the slopes of tangents to curves passing through the point α.)
Imposing condition 1, we find from (5.27) that
![]()
so that
![]()
and hence
![]()
![]()
as required. Imposing condition 2, with ![]() we have
we have
![]()
so that λ/i is a positive real number. But, on the other hand, |λ| must equal R. Therefore λ = iR, and
![]()
Example 2. Find a conformal mapping of the disk K: |z| < R onto itself such that a given point α ∈ K is mapped into the center of K.
Any such mapping
![]()
provided it exists, vanishes for z = α, and hence α is the zero of L(z). But the point α* symmetric to α with respect to the boundary of K, i.e., the circle C: |z| = R, must be mapped into a point symmetric to the center w = 0 of K with respect to C. Therefore α* must be mapped into the point at infinity, so that L(α*) = ∞ and α* is the pole of L(z). It follows that L(z) has the form
![]()
[cf. (5.27)], where λ is a nonzero complex number. According to (5.26), the point α* symmetric to α with respect to C is
![]()
and hence (5.28) becomes
![]()
We now show that (5.29) maps K onto K, with z = α going into w = 0, if we choose |μ| = R2. Since L(α) = 0 for any μ, by construction, it is sufficient to show that (5.29) maps the circle C:|z| = R onto itself. If
![]()
is an arbitrary point of C, where
![]()
then
![]()
and hence
![]()
Therefore (5.29) maps C into C, and hence onto C, by the same argument as before. This example is considered further in Probs. 4–6.
Problem 1. Map the upper half-plane Im z > 0 onto the unit disk |w| < 1 in such a way that
a) w(i) = 0, arg w′(i) = –π/2;
b) w(2i) = 0, arg w′(2i) = 0;
c) w(α) = 0, arg w′(α) = θ (Im α > 0).
![]()
Problem 2. Map the disk |z| < 2 onto the half-plane Re w > 0 in such a way that w(0) = 1, arg w′(0) = π/2.
Problem 3. Map the disk |z – 4i| < 2 onto the half-plane v > u in such a way that the center of the disk goes into the point –4, while the point 2i on the circumference of the disk goes into the origin.
Problem 4. In formula (5.29), the argument of μ is left unspecified. If the problem is to have a unique solution, we must impose an extra condition on L(z). Find the form of the mapping (5.29) if
a) A given point a on the circle C: |z| = R goes into the point w = R on C;
b) The derivative L′(α) is a positive real number.
Comment. Cf. the corresponding conditions on p. 108 for the mapping (5.27).
Problem 5. Find the Möbius transformation w = L(z) mapping the unit disk |z| < 1 onto itself in such a way that
![]()
Problem 6. Find the Möbius transformation mapping the unit disk |z| < 1 onto itself in such a way that two given points z1 and z2 of the disk go into the points ±α (|α| < 1). Find the expression for α in terms of z1 and z2.
1 Here we allow p or q to take the improper value ∞
2 Henceforth, for simplicity, we shall often omit the argument z, writing L1 instead of L1(z), U instead of U(z), etc.
3 See e.g., G. Birkhoff and S. MacLane, op. cit., Chap. 6, Sec. 2.
4 See e.g., G. Birkhoff and S. MacLane, op. cit., Chap. 6, Sec. 7.
5 Therefore, in the class of Möbius transformations, an entire linear transformation is characterized by the fact that at least one of its fixed points is the point at infinity.
6 By x:y is meant the ratio of x to y, i.e., the quantity x/y.
7 As usual, a straight line is regarded as a limiting case of a circle (cf. p. 93).
8 Note that the assertion that the observer at z2 finds G on his left is equivalent to the assertion that in order to enter G along the segment δ at the point z2, the observer must make a “left turn,” i.e., a counterclockwise rotation through 90°. But w = L(z) has a nonzero derivative at z2, and hence is a conformal mapping of the first kind which preserves not only angles but also the directions in which they are measured (recall p. 57). Therefore, in order to enter ![]() along the arc Δ at the point w2, the observer at w2 must also make a left turn and hence finds
along the arc Δ at the point w2, the observer at w2 must also make a left turn and hence finds ![]() on his left.
on his left.
9 It is in this sense that Möbius transformations are said to be symmetry-preserving.
10 In expressions like ΠU: Im z > 0 and K:|w| < R, the colon means “defined by the condition.”