Figure 11
Mach 3.0 was the normal cruise speed. The cruise leg was where experience in the SR-71 really paid off. After three to four hundred hours in the Blackbird, it became instinctive where to position the forward and aft bypass doors, achieving optimum efficiency. A new pilot learned by listening to the old heads and by trial and error. The name of the game was being able to achieve the best cruise performance in any part of the world for that particular plane.
If the forward bypass doors were opened too far, the drag decreased aircraft performance, potentially to the point of having to abort the mission for insufficient fuel. However, keeping the forward bypass doors opened more than optimum was also the conservative way to keep from encountering unstarts.
If the forward bypass doors modulated between five and ten percent open, the drag from the exiting inlet air was minimized, and aircraft performance was optimized. This setup was the most fuel-efficient way to fly the SR-71. However, if one of the forward bypass doors closed, it created an unstart. The unstart and inlet recovery process would put the aircraft even further behind on fuel consumption. It was hard to win!
At Mach 3.0, it often worked out that putting the aft bypass doors in the CLOSE position opened the forward bypass doors too much, and putting the aft bypass doors in the A position closed them down too tightly. The best solution was to keep the aft bypass doors in the CLOSE position and merely fly the SR-71 around Mach 3.05. By flying at a slightly high Mach number, the forward bypass doors typically closed down to an optimum setting.
When you think about fuel efficiency for any airplane, there is some finite rate of climb that will always keep the plane at its maximum-range cruise altitude, depending on its decreasing gross weight (i.e., rate of fuel consumption). For small planes, this might be a climb of ten feet per minute, but as the aircraft burns off fuel and reduces its gross weight, a slightly higher altitude will always keep the plane at a maximum-range cruise. However, because of air-traffic control (ATC) conflicts below sixty thousand feet with other aircraft, pilots have to fly at a constant altitude, burn down fuel to a given quantity, and then request a higher altitude.
Above sixty thousand feet, the SR-71 owned the airspace! On the rare occasion there was more than one SR-71 airborne or a possible U-2 conflict existed, the altitude separation with aircraft was discussed during the mission briefing. Since there were no other aircraft to consider above sixty thousand feet, crews flew the SR-71 in a cruise/climb profile for maximum fuel efficiency. To sustain supersonic cruise speeds, the SR-71 had to remain in afterburner with a correspondingly high rate of fuel consumption.
A check of the SR-71’s Mach 3.0 cruise performance chart shows that at seventy-one thousand feet with a typical level-off fuel load of fifty thousand pounds, the total fuel flow being consumed by both engines was 41,600 pounds per hour, or around seven hundred pounds every minute. A climb rate of 100 to 150 feet per minute kept the SR-71 at its maximum-range cruise profile throughout the mission.
Although crews flew maximum-range cruise nearly ninety-eight percent of the time, they had to be prepared to fly the following five profiles:
A. Min-AB cruise: This profile yielded the lowest cruise altitude for the Mach specified and usually resulted in less than maximum range.
B. Maximum range (optimum) cruise: This profile yielded maximum range for the Mach specified. Power settings were in the lower portion of the AB range.
C. Intermediate altitude cruise: This profile yielded altitudes above the maximum range profile but below the maximum altitude cruise profile. Specific range was less than optimum but reasonably efficient.
D. Maximum altitude cruise: This profile resulted in altitudes approximately one thousand feet below the max-AB ceiling for the Mach specified.
E. Max-AB ceiling: This profile required continuous operation at max-AB and the Mach specified. In the Mach 2.8 to 3.2 range, the max-AB ceiling profile was four to five thousand feet above the altitude schedule for maximum range. The use of the max-AB ceiling profile was restricted to nonturning flight. A descent of approximately two thousand feet had to be completed prior to a turn entry.
Just below the airspeed indicator was the triple display indicator (TDI), displaying KEAS, altitude, and Mach number. The selection of any two of these three values automatically defined the value of the third. Cruise charts in the checklist provided data for all three inputs (see Appendix D, page 201). For instance, if you had twenty thousand pounds of fuel remaining at Mach 3.0 maximum-range cruise, then your altitude should have been around 77,600 feet and your KEAS reading 346 knots.
The large attitude directional indicator (ADI), horizontal situation indicator (HSI), and moving map display were dead center on the pilot’s cockpit display. These were the three main instruments telling the pilot everything he needed to know about flying and navigating the SR-71 at Mach 3+ speeds. The ADI and HSI worked similarly to the displays in a T-38 but with minor modifications. The major difference was their tie-in with the ANS to provide navigational inputs. In the NAV position of the mode selector switch, the bank steering bar gave commands to keep the aircraft on track. It worked just like flying an ILS approach in the T-38: by keeping the bank steering bar centered, you were either on course or heading back to course.
The pitch steering bar, however, became very unique. In the ANS display mode setting of the attitude indicator, the pitch steering bar indicated rate of climb or descent from the input of sensitive ANS gyros. The pitch steering bar vertical velocity indications were used to maintain precise control of altitude at high Mach. The minimum vertical velocity sensed by the ANS gyros and displayed by the pitch steering bar was around fifty-five feet per minute. The bar indicated zero vertical velocity when aligned with the small airplane symbol on the ADI. The displacement of the steering bar was opposite in direction to the vertical velocity indicator in order to show the direction of pitch attitude change required to offset the climb or descent. To achieve maximum-range cruise/climb profile, the pilot flew the SR-71 so that the top of the pitch steering bar barely touched the bottom of the small airplane symbol on the ADI. This technique put the plane in a climb of around 100 to 150 feet per minute.
In order to understand unstarts, you first have to understand the air inlet system itself. When most aviators think of supersonic jets, they focus on the tremendous thrust the aircraft’s engine(s) puts out to reach such high speeds. In the case of the SR-71, it was not the sixty-eight thousand pounds of thrust the J58s produced that allowed the aircraft to attain speeds in excess of Mach 3.0; it was the inlets. Kelly Johnson and Lockheed Skunk Works engineers like Ben Rich knew if they could somehow capture and harness the high-speed airflow going over and around the SR-71, it could provide additional thrust.
Kelly Johnson was often quoted as saying: “At Mach 3.2 (its design Mach number) cruise, the J58 engines produced approximately twenty percent of the thrust, while the inlet produced around eighty percent of the thrust.” Kelly once gave a tour of the Blackbird to then Secretary of Defense Robert McNamara. One of the generals on his staff took Ben Rich (Kelly’s deputy, and considered the father of the inlets) aside and said he didn’t understand the large spikes. He thought they would block out air coming inside the inlet and assumed Ben would want the air unimpeded. Ben told him the object was to build up pressure at high altitudes. The analogy would be like squirting water from a garden hose and then placing your thumb over the opening. The result is high-velocity water or, in the case of the SR-71, high-velocity air. The general understood.
Arnie Gunderson, who worked for Pratt & Whitney and is known in Blackbird circles as “Mr. J58,” was the technical representative manager of all the SR-71’s engines. He wrote the following explanation, which sheds light on how the SR-71 gained additional thrust by utilizing the Mach 3.2 air entering the inlet:
What is ram? It is an aspect of airflow over and through a moving object. We know that air creates drag or friction as it flows over the airplane. But when the flow goes into an opening in the airplane, such as an engine inlet, and is slowed down, its static pressure increases. Think about sticking your hand out the window of a car while it is moving at highway speeds. You hold your hand flat, like a wing and can move it up and down with slight movements of your wrist. That shows lift. But the force that is pulling your hand backward is drag. Close your hand into a fist. The only thing you feel is drag. Open your hand into a cup shape to capture the air. The force in your palm can be called ram air. The air is slowed down (relative to your hand), and the pressure has increased.
The same thing happens in the nacelle of the SR-71. Air enters the inlet and is slowed down to about 0.6 Mach (relative to its Mach 3.2 entry speed). It gains a lot of pressure and temperature in that process. That’s energy that can be recovered and used, if you’re smart. The SR-71 nacelle flows that air around and through the engine, and then it is finally expanded through the exhaust ejector at the very end of the nacelle. That final expansion recovers about eighty-eight percent of the original energy imparted to the air as it first entered the nacelle a few milliseconds earlier. So the bottom line for the SR is not ram, but ram recovery. In a few words, ram recovery is capturing the supersonic shock wave and using it to create additional thrust.
Gunderson also provided the following statistics about the J58 engine: “The engine is twenty feet long, four and half feet in diameter, weighs six thousand five hundred pounds, and puts out thirty-four thousand pounds of thrust while consuming sixty-five thousand pounds of JP-7 per hour and flowing three hundred twenty-six pounds of air per second. These are all sea-level parameters.”
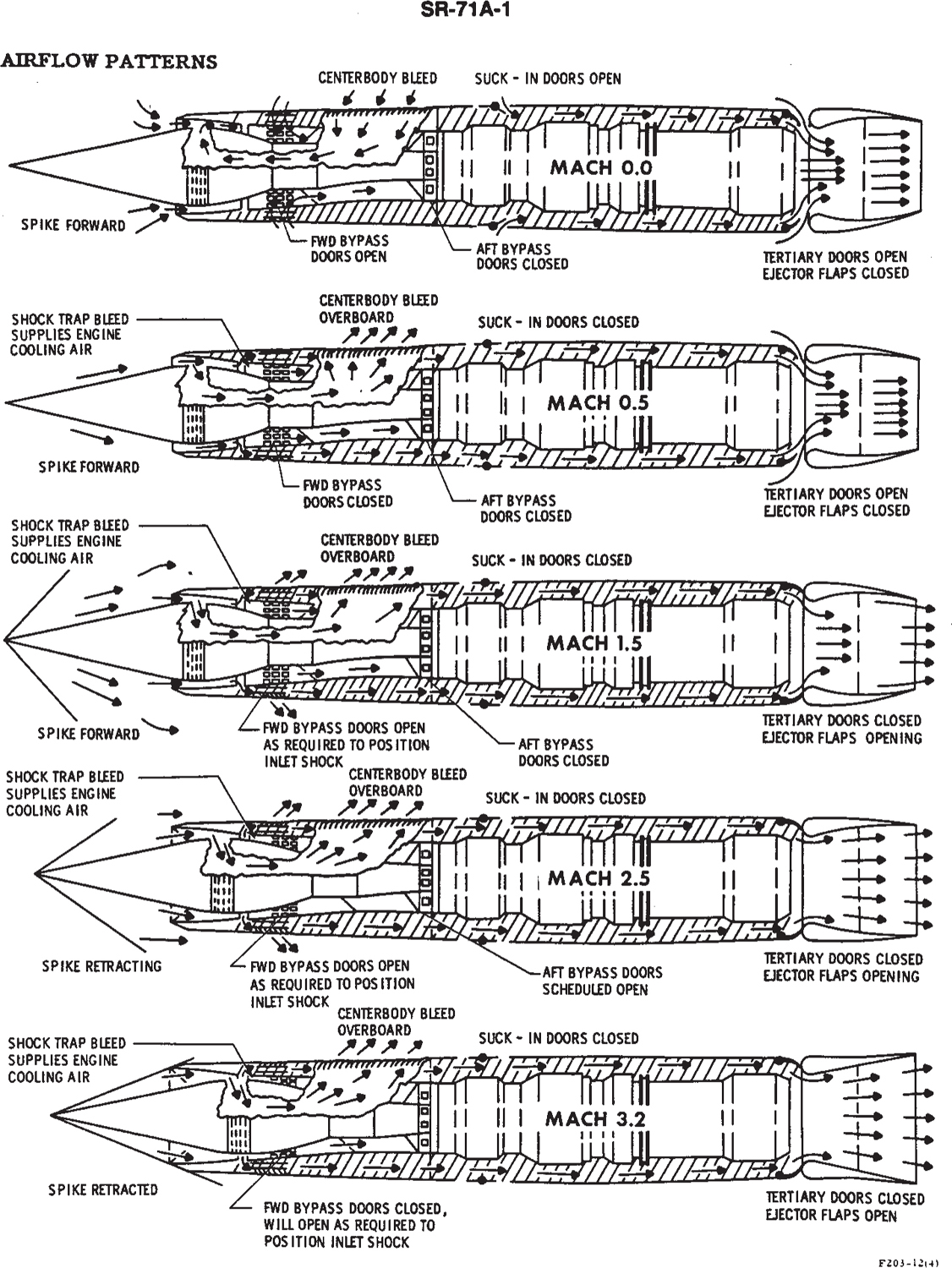
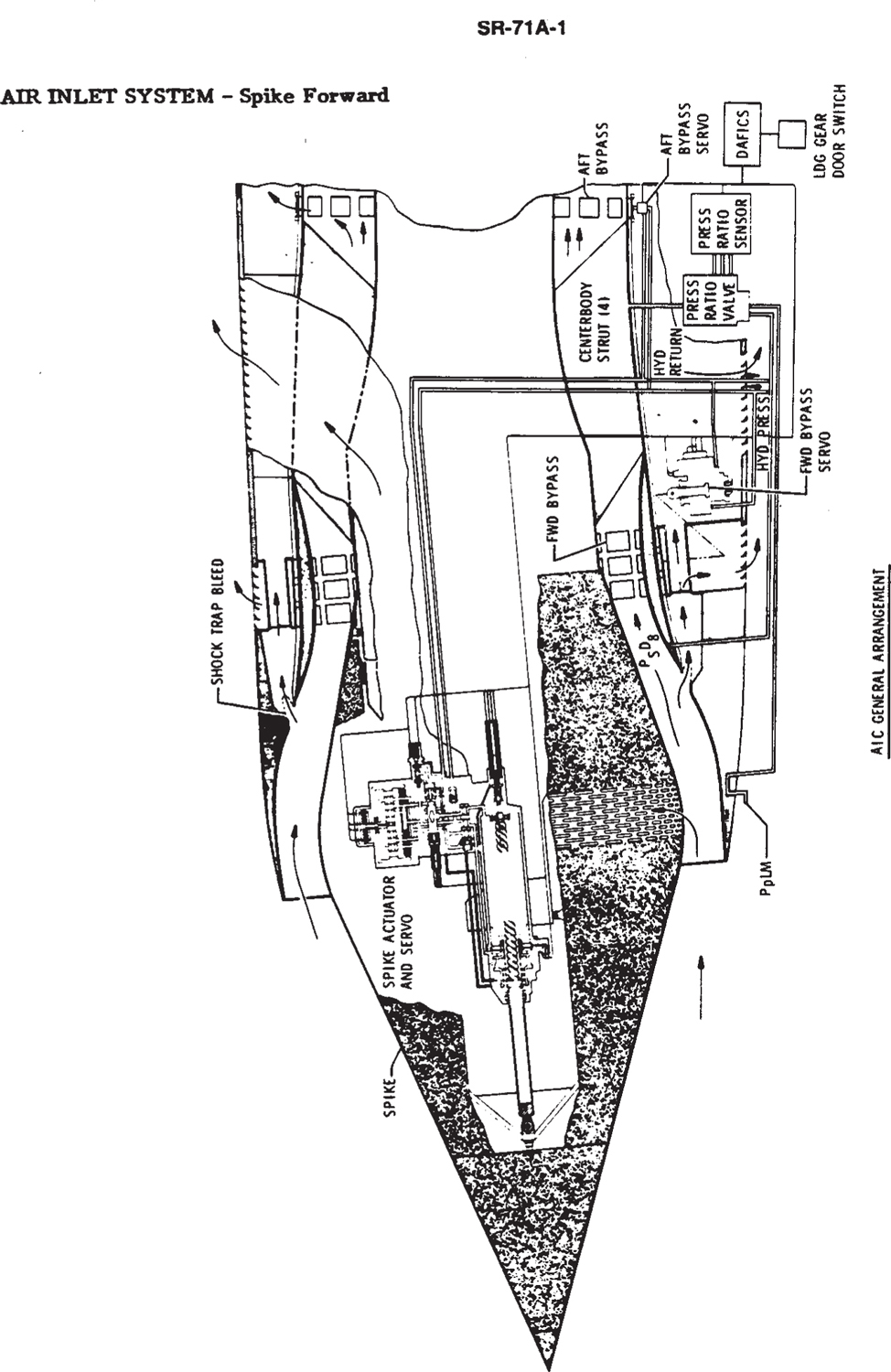
To understand inlet unstarts, it would be most helpful to reference the air inlet diagrams (see figure 11, Air Inlet System; and figure 12, Airflow Patterns) while reading this section. The air inlet consisted of the cowl structure, a moving spike to provide optimum internal airflow characteristics, the variable forward and aft bypass openings, a spike porous centerbody bleed, and an internal shock trap bleed for internal shock wave positioning. Each inlet was canted slightly inboard and downward to align with the supersonic airflow pattern over the plane.
Both the forward and aft bypass openings controlled airflow characteristics within the inlet and airflow to the engine. Normally, the spike and forward bypass were operated automatically and the aft bypass manually. However, manual controls were also provided for the spike and forward bypass doors in the event the pilot needed to override the automatic system. The forward and aft bypass openings and the spikes were operated by the left and right hydraulic systems, respectively.
The spike centerbody was equipped with a porous bleed (small slots) that removed spike boundary-layer air and prevented flow separation. The boundary-layer air passed through the spike’s interior to the four supporting struts and vented overboard through nacelle louvers. Visualize the tulip bulb–shaped spike as it moved aft into the inlet. At the spike’s full aft position, the captured airstream area at the entrance to the inlet increased 112 percent, from 8.7 square feet to 18.5 square feet. At the same time, as the spike moved full aft, the throat closed down to 4.16 square feet—fifty-four percent of the area at Mach 1.6. While the capture area increased with speed, the throat area closed down, all because of the spike’s unique tulip-bulb shape.
The forward bypass doors in each inlet provided overboard exhausts for inlet air that the engine did not require. The forward bypass doors were automatically modulated by computers to control inlet pressure aft of the normal shock wave, which in turn positioned the shock properly near the throat.
The term “unstart” implies that something must be started to begin with. The conical supersonic shock wave formed at the very tip of each spike and narrowed down the faster the aircraft went, eventually entering the inlet. When the shock wave first entered the inlet, that inlet was considered to be started. An inlet unstart could only occur when an aircraft was supersonic and the shock wave was established inside the inlet. An unstart occurred when the shock wave was rapidly ejected back outside the inlet.
Any time the inlet air pressure became unacceptable, a phenomenon known as an aerodynamic disturbance, or unstart, took place. Habus shortened aerodynamic disturbance to “AD” and used the terms “unstart” and “AD” interchangeably during their discussions. Computers maintained very tight air pressure parameters inside the inlet. An aerodynamic disturbance took place if air pressure parameters got out of kilter.
The inlets usually started between Mach 1.6 and Mach 1.8, when the shock wave moved from in front of the inlet to a position near the shock trap bleed in the throat. The shock trap bleed was a circular exhaust port, located around the inside perimeter of the inlet, designed to prevent the supersonic air from going any further into the inlet. The shock trap bleed air joined the aft bypass airflow to help cool the engine and provide additional thrust to the ABs.
An unstart was the expulsion of the supersonic shock wave inside the inlet to outside in a fraction of a second; the inlet was no longer started. Unstarts are a phenomena of airflow in a supersonic inlet when the inlet pressure behind the shock wave becomes too great or the spike position too far aft. Improper spike and/or bypass door positions could result from inlet control errors, computer failures, loss of hydraulic pressure, electrical glitches, or mechanical failures. Any of these malfunctions could cause an unstart.
Unstarts were characterized by a loud bang, airframe roughness, aircraft yawing and rolling, and a decrease of the CIP rapidly to four psi. Fuel flow decreased quickly, and the afterburner could have blown out, although the engine continued to run. EGT usually rose, with the rate of increase being faster when operating near limit Mach and altitude. A distinct increase in drag and loss of thrust occurred because of increased air spillage around the inlet and reduced airflow through the engine. All of these events happened instantly as the shock wave was expelled.
The aircraft yawed rapidly toward the unstarted inlet. The yaw created a roll in the same direction. A pitch-up tendency occurred due to yaw and roll rates developing during the unstart. Roll control was critical if the unstart occurred on the down-wing inlet during a turn. At altitudes above seventy-five thousand feet, roll control might be ineffective during an unstart unless the AOA was immediately reduced. Elevon effectiveness increased rapidly as the AOA was reduced and only moderate roll inputs were required.
An unstart was usually very unpredictable and violent, mainly because the inlets and engines were located so far away from the centerline of the aircraft. Unstarts generally occurred when pilots least expected them—all relaxed and taking in the magnificent view from seventy-five thousand feet. The instant an unstart occurred, the first step in the pilot’s boldface emergency procedures was to keep the AOA within limits (see Appendix D, page 201).
An experienced pilot could sometimes feel that an unstart was about to occur if the forward bypass door was closing down too tightly. A very subtle inlet duct rumble manifested itself throughout the airframe—a hint that an unstart was imminent unless the pilot soon took corrective action.
The most severe unstarts occurred right at IGV shift and were often accompanied by an AB blowout, creating additional pitch, yaw, and roll of the aircraft. When the SR-71 taxied in from a mission, maintenance personnel and the mobile crew could visually tell if the flyers experienced a hard unstart by looking at the engine exhaust “turkey feathers”—the overlapping slats of metal surrounding the exhaust, which opened and closed according to the afterburner’s output pressure. A hard unstart caused the turkey feathers to open beyond their limits and, consequently, jump out of their overlapping tracks and become visibly tangled. Unstarts at cruise were the second most severe, and unstarts during the decel were more like mild compressor stalls.
Now that you know all about unstarts, how did pilots handle them? Some of the early Blackbirds (A-12s) were lost in the 1960s, as pilots experienced unstarts for the first time. Working closely with their test pilots, Lockheed Skunk Works engineers began to understand unstarts better and came up with a solution to minimize the extreme yawing created by unstarts.
Each engine incorporated an automatic restart feature to aid the pilot in recovering from an unstart. Not only was there an immediate large loss of thrust during an unstart but also a tremendous amount of drag created by the automatic restart cycle. To keep the drag as symmetrical as possible during the automatic restart cycle, the Skunk Works engineers came up with a cross-tie system. It was enabled once the aircraft was above Mach 2.3. If an unstart occurred above Mach 2.3, the cross-tie feature sympathetically restarted the good inlet as well. This balanced restart system helped to minimize the extreme rolling and yawing of the aircraft and prevented the good inlet from unstarting as well. The downside to the cross-tie feature was that total induced drag now doubled, as both inlets went through the restart cycle; this was the lesser of two evils.
An inlet control system called the shock expulsion sensor (SES) used compressor inlet pressure as its reference. A rapid CIP decrease was characteristic of an impending unstart, which meant that the shock wave inside the inlet was about to be expelled outside. Whenever the CIP rapidly dropped below twenty-three percent (an unstart condition), the SES actuated and initiated the automatic restart cycle on the offending inlet, or both inlets if the plane was above Mach 2.3.
To recapture the supersonic shock wave and airflow after an unstart above Mach 2.3, the automatic restart cycle went through the following sequence on both inlets: the forward bypass doors drove full open; the spikes rapidly moved forward as much as fifteen inches, attempting to capture the shock wave; the spikes then retracted to their scheduled position; and the forward bypass doors returned to automatic operation and began to close down to satisfy the amount of air to bypass.
If the unstart didn’t clear (correct) itself after one restart cycle, the cycle would repeat itself until it affected a restart or the pilot took over manually. One complete restart cycle took around six seconds. In that short time, the speed could easily decrease from Mach 3.0 to 2.9 or lower. If the inlet went into subsequent automatic restart cycles, the Mach decreased even further.
During an unstart, the pilot’s primary concern was aircraft control. Once he had taken care of that, the pilot had to figure out which inlet had unstarted and why. It was extremely important for the pilot to identify which inlet had unstarted so he could apply corrective actions on the offending inlet and not the good one! With the addition of DAFICS, an “L UNST” or “R UNST” light illuminated on the pilot’s instrument panel to indicate which inlet was the culprit.
Prior to DAFICS, there were no lights to tell the pilot which inlet unstarted. He had to figure it out, and that was not always easy. Below Mach 2.3, it was obvious. Above Mach 2.3 with cross-tie active, the pilot could tell by watching the spike and door indicator needles. Whichever spike and door needle (left or right) was moving to its restart position first was the unstarted inlet; the lagging needle was the good inlet. The initial yawing motion was another clue as to which inlet had unstarted.
If only the forward bypass door had caused an unstart, it was possible to run a manual forward bypass door by itself and leave the spike in the automatic mode of operation. However, if the spike was the problem, both the spike and forward bypass door had to be manually operated by the pilot. Running a manual spike and door kept the pilot very busy! Depending on the phase of flight (climb, cruise, turns, or descent), the pilot had to constantly adjust the spike and forward bypass door. The manual spike and door schedules are listed in Appendix D, Page 201.
It really became confusing if you were already flying with a manual spike and door and experienced an unstart. The automatic restart and cross-tie feature did not override any manually positioned inlet control. If an unstart occurred on an inlet in manual spike operation, neither that inlet nor the opposite inlet responded. Therefore, if the inlet still in the automatic setting went through a restart cycle, it was obviously the offending inlet.
With only one forward bypass door in manual control, an unstart on either inlet would result in automatic actuation of both spikes and only the door in automatic control. If the manually controlled door was not fully opened by the pilot, an unstart and possible engine stall could be expected on that inlet, even if the opposite inlet unstarted. Imagine trying to comprehend all of this as it was happening at Mach 3, and you still have to fly the plane!
Just below the spike indicators were the left and right restart switches. They were used to override the automatic restart cycle if the inlet wouldn’t clear. When turned ON, they would override all other spike and door settings for that inlet. Turning on either restart switch drove the respective spike full forward and its bypass door full open, creating tremendous drag on the aircraft but providing the most conservative means of clearing an inlet. The spike and door remained there until the pilot turned off the restart switch. However, prior to turning off the restart switch, the pilot placed the manual forward bypass door control knob to the one-hundred-percent-open position. Now, he controlled where the bypass door would be rather than the computer.
Next, he reached down and turned the restart switch OFF and watched as the spike began to retract into the inlet. The forward bypass door remained one hundred percent open manually. Recall that the automatic restart cycle only drove the spike forward a maximum of fifteen inches, and that might not have been enough to recapture the shock wave. Turning on a restart switch drove the spike full forward and offered the best chance of capturing the shock wave out in front of the inlet, particularly at high Mach numbers.
By trial-and-error logic in the above scenario, if the unstart did not repeat itself when the pilot turned the restart switch OFF, he assumed the spike was good and the forward bypass door was the culprit and had to be controlled manually. If the unstart repeated itself when the pilot turned off the restart switch, he assumed the spike was at fault and would have to run both a manual spike and door on that inlet. Every time the pilot reached down with his left hand to turn off the restart switch, he gritted his teeth in preparation for another unstart as he watched the spike needle moving aft. He let out a big sigh of relief if he didn’t hear the bang again!
Depending on where their heads were located at the time of an unstart, some crew members have actually cracked their pressure suit helmets by hitting them on the side of the canopy from the force of the unstart. The vast majority of unstarts cleared themselves after one automatic restart cycle and were considered transient events. The crew pressed on with the mission and paid more attention to the inlet parameters. If a forward bypass door caused the unstart, it was simply a matter of taking over manually and positioning the door where the checklist indicated.
Occasionally, unstarts didn’t clear easily and repeatedly went through the unstart/restart cycle until the pilot took manual control of the spike and/or forward bypass doors. Continual unstarts that wouldn’t clear were generally caused by hydraulic actuator problems with the spike’s positioning or a major malfunction of the air inlet computer, requiring the crew to take over manual control of the inlet(s) and possibly abort the mission.
Manual operation of the inlet placed operational restrictions on the crew. Running manual inlets, the maximum speed above seventy thousand feet was Mach 3.0, maximum altitude was eighty thousand feet, and maximum bank angle above seventy-five thousand feet was twenty degrees. The crew members had to decide quickly if they could complete the mission with the new flying restrictions. Suddenly, fuel became a major consideration. An unstart/restart cycle gobbled up precious fuel, and running in the manual mode was not as fuel efficient as the automatic mode. In the simulator, crews were constantly bombarded with unstarts and flying manual inlets, making operational decisions based on compounding problems and emergencies.
On the right throttle, a two-detent slide switch (similar to a speed brake switch in fighters) was also used to control the inlets. It was called the throttle restart switch and was purposely located on the throttle for quick, easy access when everything else had failed and the pilot immediately needed stable inlets. Sliding the switch back with the pilot’s left thumb to its first detent drove both forward bypass doors full open. Sliding it further back to the second detent kept the doors open and drove both spikes full forward. The increased drag from having both spikes forward and the forward bypass doors open gave the crew no choice but to slow down and descend. The descent rate in this configuration was extremely rapid and was also used for emergency descents necessitated by other serious aircraft malfunctions.
Over the history of the Blackbird program, many improvements reduced the severity and frequency of unstarts and provided a better cockpit presentation of what was going on with the inlets. In the very early days of the Blackbird program, the A-12 cockpit did not have spike or door indicators. Better and faster computers, the cross-tie system, and learning to understand and deal with unstarts vastly improved the SR-71’s reliability and safety.
The SR-71’s mission-planning branch developed all our missions. The group of highly experienced Air Force officers knew how to plan SR-71 missions down to the finest details. Many former RSOs worked as mission planners. For every new mission, the planners had to do what was called a “feasibility study.” The process entailed looking at the area of interest, ensuring it could be covered adequately by the SR-71, and determining the intended route of flight, foreign country overflight considerations, placement of air refueling tracks, and where best to originate the mission. Once the mission proved feasible and approval was given to develop it, planners went into high gear. It was essential to plan in excruciating detail specifics like: what suite of sensors to use, where and when each sensor should be on/off, where to position the air refueling tracks, fuel requirements, where the JP-7 was coming from, timing of the mission, and so forth.
The mission route was defined in terms of destination points (DP), control points (CP), and fix points (FP). A continuous series of numbered DPs delineated the prescribed mission track from takeoff to landing. Control points allowed automatic activation of imaging sensors at specific locations during flight, and fix points defined preferred navigational references for the RSO to crosscheck the accuracy of the ANS throughout the flight. Mission planners could load up to 127 each of DPs, CPs, and FPs onto the mission tape—381 in total.
The heart of the ANS was a large, self-contained unit about half the size of a large refrigerator called the “guidance group.” The guidance group computed autonavigation, guidance, and avionics control and maintained a continuously updated account of navigational status and coordinate values. The computer also stored instrument and mathematical coefficients—predetermined data references that defined the stars and the mission flight plan. For continuous accuracy, the computer initiated and evaluated self-tests periodically throughout the flight. Software corrections to the star data were provided for the supersonic shock wave over the star tracker window that refracts the starlight and for pressure and temperature gradients acting on the window, causing optical lens effects.
The SR-71’s flight plan, with the DPs, CPs, and FPs for the entire mission, was contained on a 3/4-inch-wide Mylar tape punched with holes and loaded inside the guidance group computer memory. The tape was made by the mission planners. As the roll of tape ran inside the guidance group, the sequential pattern of holes told the aircraft what bank angle to use for each turn, when each sensor was on/off, and where to have the sensors look for targets to gather intelligence.
Prior to every flight, ANS maintenance personnel loaded the tape and ran the guidance group in their shop to ensure the programming was correct. The guidance group was delivered to the aircraft several hours before flight, hoisted up by a crane, and slowly lowered into its air-conditioned bay, located directly in front of the air refueling door. Once inside its bay, numerous electrical, air-conditioning, and computer connections were completed, mating the guidance group to the aircraft. An exterior fuselage panel containing the star tracker window bolted over the guidance group. The round window was about ten inches in diameter and made of highly polished quartz glass for optimum clarity. A star-tracking telescope was situated on the guidance group and, with a seventy-eight-degree cone of vision, peered through the quartz glass window searching for stars.
The RSO’s cockpit contained all the ANS controls. On his ANS panel, the RSO had a constant digital readout of longitude and latitude, wind direction and velocity, and the time and distance to the next DP. By using his keyboard, he could access a variety of other information from the ANS display panel, such as ground speed and true airspeed. As long as everything was working satisfactorily, the RSO monitored the readouts, ensuring accuracy. If required, the RSO was able to manually override the ANS’s preprogrammed flight path and sensor action points.
It was an automatic abort if the ANS wasn’t working properly. My RSO, Don Emmons, had first-hand knowledge of this and had total responsibility for making abort decisions concerning our navigational accuracy. If there were clouds or the star tracker couldn’t achieve a satisfactory star lock-on, the SR-71 navigated by the inertial guidance system. The inertial system was aligned on the ground and updated automatically by the ANS when it was navigating normally. By using fix points every hour, the inertial system maintained an accuracy of two nautical miles per hour. It was accurate enough to get you home, but not accurate enough for navigating through the sensitive area.
The mission planners used small-scale maps called operational navigational charts (ONCs, scale 1:1,000,000) to draw the route of flight. Each crew member carried a mission map as well as the computer flight plan. Once familiar with all the flight planning materials, most pilots flew the mission solely by reference to the map projector. It was much easier that way with a pressure suit on. The moving map displayed not only the black line but, at each DP, listed the precomputed elapsed time, fuel remaining, Mach, altitude, heading, bank angle, coordinates, and distance to the DP: all the information that was on the computer flight plan.
The mission-planning branch prepared the flight plans and maps for all the missions. Appendix E is a pilot’s computer-generated flight plan for a training sortie flown out of Beale called “Becky.” Appendix F is the route map for Becky. All of the training sorties were named after females; it helped crews remember the sorties better! Following along with the flight plan and map will help you understand how the SR-71 navigated around its route.
Looking at the front page of the flight plan, you will notice it contains summary information for the entire flight. For Becky, the fuel load was forty-five thousand pounds, with a total mission time of two hours and twenty-two minutes, covering 2,207 nautical miles. DP-4 was the location of the ARCP. At a speed of 0.9 Mach, the aircraft was programmed to reach the ARCP twenty-six minutes after takeoff, with 28,300 pounds of fuel remaining. Becky landed at DP-14 (Beale) with 21,400 pounds of fuel at touchdown. The times shown at Mach 2.6, 3.0, and 3.15 were for maintenance records. If there were any high-bank-angle turns (over thirty-five degrees), they would be listed on the summary page.
The flight plan itself displayed important data at each DP and at other important locations (like level-off and start-descent points) along the route of flight. Looking at the map, DP-1 is the takeoff leg out of Beale. DP-2 and DP-3 comprised the instrument departure climbing out from Beale. The flight plan shows level-off (L/O) occurring 2.6 minutes after brake release at twenty-five thousand feet and a cruising speed of 0.9 Mach.
To crosscheck the accuracy of the navigation system throughout flight, every DP and significant event had an associated checkpoint using the TACAN. For DP-3, the checkpoint was the 035 degree radial at twenty-five NM from the BAB TACAN station (channel twenty-three). True heading (TH) and magnetic heading (MH) were also listed at each point to check against the aircraft’s headings. Fuel onboard at DP-3 should have been 35,800 pounds at standard day temperatures. The estimated time en route (ETE) and total en route time (TET) were listed for timing accuracy. The distances for each leg and to the next air refueling, along with the distance remaining to landing, were listed in the first column after the DP.
The flight plan contains a column titled “back set” and requires some explanation. Reference the map and page four of the flight plan. At DP-9 under the back set column, you will find the letters TSA (turn start automatic) with the number seventy-one directly beneath it. That tells the pilot flying from DP-8 to DP-9 that once his ANS distance from DP-9 reads seventy-one nautical miles, the aircraft will automatically roll into a right turn. The bank angle will be thirty-two degrees, and with an estimated temp dev of +3 degrees, the TAS (true airspeed) will be 1,724 knots.
If you look at DP-9 on the map, note that it’s located outside the turn radius. In fact, all SR-71 turns initiated by the ANS are computed from outside the turn radius. Here’s how: If you drew an extension of the straight leg (black line) from DP-8 to DP-9, and likewise from DP-10 to DP-9, the point outside the turn where the two lines intersect is the center of each numbered DP circle on the map. The small (perpendicular) black lines drawn on the map prior to and after each turn indicate where the aircraft starts to roll into and out of each turn, respectively. The distance from that perpendicular black line to the center of the DP-9 circle is seventy-one nautical miles. Once the aircraft reaches the back set distance of seventy-one nautical miles from DP-9, the aircraft rolls into the turn. Simultaneously, the distance changes to reflect the next leg distance to DP-10 (including the turning distance throughout DP-9).
The Habus had a saying: “You’ve never been lost until you’re lost at Mach 3.” This statement stressed the importance of crews anticipating every turn. As the plane approached each DP on the moving map display, the pilot double checked that his bank steering bar was centered and he was at the correct altitude and Mach number.
From a pilot’s standpoint, it took some adjustment learning to have the AUTO NAV fly the programmed track while he controlled pitch with the serrated wheel and Mach number with the throttles. This complicated technique was precisely how the Mach 3+ cruising was accomplished. The pilot needed to anticipate what the ANS was about to do in order to coordinate pitch and power going into, and coming out of, every turn.
Although pilots practiced hand-flying the SR-71 at Mach 3, it was not easy. Flying straight and level, the pilot could hold track accurately, but turns presented a greater challenge to stay on the black line. After hand-flying a ninety-degree turn, the pilot would be doing well to be within a mile of his track. One mile might not sound very far off track considering the aircraft was traveling at Mach 3, but it could make a significant difference on the intelligence the SR-71 was sent to gather.
It was practically impossible to hand-fly the aircraft smoothly and precisely enough to obtain good imagery when the sensors were operating, particularly for radar imagery. We had a requirement that the bare-minimum pitch-and-roll autopilot had to be engaged during all sensor operations. When pilots flew their annual check ride in the SR-71B model, it was generally all hand-flown; it was a pride thing between seasoned pilots to show the evaluator they could fly without an autopilot.
The manner in which the ANS turned the aircraft was truly unique. All supersonic turns made by the ANS were constant-radius turns. A typical thirty-two-degree bank turn at Mach 3.0 has a turn radius of seventy nautical miles. The mission planners chose bank angles to achieve the desired sensor results and remain within the required geographical airspace. If the mission planners scheduled a bank angle of thirty-five degrees or less, the ANS could command a bank up to thirty-five degrees maximum if needed. If the turn was planned for bank angles between thirty-five and forty-two degrees, the ANS could command up to its maximum bank angle of forty-five degrees to keep the SR-71 on course. Once on course, the ANS kept the aircraft within three hundred feet of the black line.
In AUTO NAV, if the aircraft was considerably off the black line, the ANS would steer toward the desired track at a thirty-degree intercept angle. Depending on the ground speed, the ANS computed where to lead a turn to discontinue the intercept and smoothly roll out, back onto the black line. Talk about leading a turn to rollout on course: at Mach 3 cruise, the lead point was approximately twenty nautical miles off course.
The Giant Scale missions flown out of Okinawa were not as demanding as the Giant Reach missions flown out of Mildenhall, although both had their challenges. Hot temp devs, high altitude winds, and tight geographical confines in Europe made flying there more difficult. For that reason, new crews flew their first operational missions out of Okinawa before setting off to Mildenhall.
Intelligence requirements of the Vietnam War dominated Det 1’s early Giant Scale activities, starting in 1968. Flight durations varied from two hours and thirty minutes to five hours and thirty minutes, depending on the number of targets scheduled on the mission and the number of refuelings. Around 1970, Det 1 began to broaden its area of interest to include North Korea by flying the SR-71 directly over the Korean DMZ, gathering intelligence far to the north. Giant Scale sorties were also flown off the coast of China and the Soviet Union. Primary targets were the Soviets’ largest naval base at Vladivostok and their nuclear testing facility at Petropavlovsk, located on the Kamchatka Peninsula. Those sorties ranged between two and four hours duration. Between late 1987 and early 1988, four long-endurance missions were flown into the Arabian Gulf, two of them lasting well over eleven hours.
The Giant Reach missions out of RAF Mildenhall gathered intelligence on three basic areas of interest. The Barents Sea missions were flown primarily to gather intelligence on the Soviet Union’s second largest naval facility near Murmansk. In the Baltic Sea, the SR-71 was able to glean intelligence on the then Warsaw Pact countries of Poland, Lithuania, Latvia, and Estonia. Flying in West Germany, the SR-71 gathered intelligence on East Germany, Poland, and the Czech Republic (then Czechoslovakia). Crews flew any combination of the three areas of interest, sometimes all three on a single mission. Long-endurance missions into the Arabian Gulf region have been flown out of Det 4, as well as post-strike reconnaissance missions over Libya in 1986.
The primary imaging sensor for the SR-71 was located in the nose of the aircraft. The nose contained either a photographic camera or a radar imaging sensor. Prior to each operational mission with a camera onboard, the detachments had to obtain target weather approval from SAC headquarters in order to launch. It was necessary to have a certain percentage of cloud-free coverage, usually around seventy percent, in the target area before headquarters gave approval to fly a photo mission. The radar sensor was originally used as the fallback sensor in case the target weather was not suitable for photographic coverage. As the radar sensor became more sophisticated and produced greater resolution, it quickly became a primary sensor.
If often seemed as if the weather personnel at SAC could never get it right. There were times after the SR-71 was already airborne when clouds moved into the area of interest and the cameras gathered little intelligence. On the other hand, many crews had flown with the radar sensor onboard when the weather turned out to be ideal for photographic imagery. Most crews liked radar missions because they were not dependent on target weather and were always a go.
There were times when the entire detachment went through the complete drill of preparing the aircraft, loading sensors, briefing the mission, getting the tankers airborne, and then canceling at the last minute because of a poor target weather forecast by SAC headquarters’ global weather department. The total effort that went into preparing for each sortie was tremendous.
Originally, the two primary sensors were either the optical bar camera, used for taking panoramic photography, or the side-looking radar system known as the CAPRE (capability reconnaissance, pronounced “caper”). The nose section of the SR-71 contained either sensor, and it was removed and replaced after every operational mission.
The OBC utilized a continuous moving roll of film. In operation, the camera took photographs while scanning from left to right across the SR-71’s flight path. Camera operations were automatic. However, the RSO could manually control camera settings if necessary. The OBC’s terrain coverage was two nautical miles along the ground track and extended thirty-six nautical miles to each side of the aircraft (further if banked). Sufficient film was on board to cover approximately 2,952 nautical miles or 1,476 nautical miles in the stereo mode.
Crews always had the high-resolution, technical-objective cameras (TEOCs, pronounced “techs”) on board for imaging specific target areas. The TEOCs were installed in the left and right mission bays and could be pointed from zero to forty-five degrees to the side of the aircraft. The ANS automatically controlled the TEOC camera operation. At zero pointing angle, the TEOCs covered a 2.4 square-nautical-mile area; at a forty-five degrees pointing angle, the TEOCs covered a five-by-six-nautical-mile diamond-shaped area, fourteen nautical miles from the side of the SR-71. Each TEOC had enough film for approximately 1,428 nautical miles of coverage. The TEOCs produced excellent photographs of MiGs falling out of the sky after attempted intercepts on the SR-71 as they ran out of airspeed and ideas!
When we flew with the radar sensor, the RSO used the recorder correlator display (RCD) to aid in navigation and check the quality of the radar image being produced. The correlator developed the actual radar imagery in flight by use of lasers and displayed the imagery on the RSO’s large RCD screen, located directly below his viewsight. However, it took sixty seconds for the correlator to develop and display the imagery. Thus, the RSO was always looking at a moving radar picture of where the SR-71 was sixty seconds prior, or about thirty-three miles behind the plane.
By 1986, a new state-of-the-art, high-resolution radar imaging system called the ASARS was developed. The ASARS views terrain by means of radar to the left and right of the ground track, at selected ranges. The ASARS sensor required the nose section of the SR-71 to be slightly modified in the shape of a duck’s bill, with obvious dimples on each side of the nose chine. An improved version of the ASARS was flight tested on the SR-71 during July 1983 in the United States and was later tested operationally at Mildenhall. The test data from those missions provided the means to enhance even further the radar capability of the equipment. ASARS and its associated support equipment and personnel were deployed to Det 4 at RAF Mildenhall in 1987 to begin flying operational missions. The system’s bugs had to be worked out, but after about six months, it was declared fully operational and began to provide day/night, all-weather reconnaissance imagery in extreme clarity.
ASARS had the capability for search, acquisition (navigation update), and two high-resolution spotlight modes. In the search and spotlight modes, the imaged area was perpendicular to the ground track, or the system could squint forward or aft up to thirty degrees. The ASARS could also operate in turns.
In the search mode of operation, the ASARS terrain coverage was a ten-nautical-mile swath, positioned twenty to one hundred nautical miles to the left and right of the ground track. In the large spotlight mode, the terrain coverage was approximately one square nautical mile; small spotlight mode, a rectangle approximately one nautical mile by one-third nautical mile. Both spotlight modes could be positioned twenty to eighty-five nautical miles to the side of the ground track. The search, acquisition, and spotlight modes were controlled automatically by the ANS.
An in-flight processor and display (IPD) produced onboard radar images from the ASARS as well. With all sensors operating, the SR-71 was originally advertised to gather intelligence over 100,000 square miles every hour. This increased to over 125,000 square miles of intelligence as sensors became more capable.
Another form of intelligence gathering is called ELINT (pronounced “E-lint”) and stands for electronic intelligence—the recording of electronic signals covering a broad range of the electromagnetic frequency spectrum. ELINT includes collecting signals from the low end of the frequency spectrum (e.g., radar acquisition, tracking, and guidance signals) to the very high frequencies of the Soviet SA-10 missile.
The SR-71 was excellent at stimulating the enemy’s electronic environment. Every time crews flew in a sensitive area, all kinds of radars and other electronic wizardry were turned on to see if they could find out what was flying so fast through the airspace. In fact, our missions were not ELINT productive unless the target was looking for the SR-71 with its electronic signals.
The electromagnetic reconnaissance (EMR) system received and recorded all the signals. It was later upgraded to the EMR improvement program (EIP, pronounced “eep”). Prior to the EIP upgrade, the EMR recorded signals from hundreds of miles around the aircraft. It had no discretion on which signals it received, making it very difficult to find specific frequencies out of the thousands recorded on one mission. The EIP had a highly sophisticated and programmable scanning system (called “smart scan”) capable of receiving only specific signals. It also had the electronic logic to key off specific signals it found, then move on to search for another associated radar frequency. For instance, having once found the SA-10’s long-range acquisition radar signal, the EIP would then look specifically for the SA-10’s associated tracking and fire-control frequencies. In another mode of operation, the EIP would let the electronic environment orchestrate the signal parameters for which it searched. The EIP was very efficient at its job. It often recorded over five hundred emitters on a single operational sortie from Mildenhall because of the large number of Soviet and Warsaw Pact electronic emitters. It was a Star Wars version of eavesdropping.
The EIP continuously recorded signals from horizon to horizon along the SR-71’s flight path, a distance of around 1,200 nautical miles. If the system recorded a specific frequency for a short period of time, computers could plot the precise location of the transmitter on the ground within approximately one-half mile at a distance of three hundred nautical miles from the SR-71. Two electronic signals that were very elusive to intelligence gathering were that of the SA-5 and SA-10 Soviet surface-to-air missiles (SAM). The Soviets didn’t turn them on very often, knowing their electronic signals would be recorded. Once recorded, future Air Force electronic defensive jamming (DEF) systems could be developed and software programmed to counter the missile threats electronically.
Although the SR-71 was good at gathering ELINT, other reconnaissance assets were even better. The 55th Wing at Offutt AFB, Nebraska, flew four reconnaissance versions of the Boeing C-135 cargo/transport aircraft—the RC-135M, RC-135S, RC-135U, and RC-135V—each with its own unique capabilities for gleaning valuable intelligence. SR-71 crews sometimes flew sorties in concert with the RC-135s, called “coordinated” missions. On coordinated sorties, the SR-71 played a dual role, not only gathering intelligence but also stimulating the electronic environment of the foreign country of interest, primarily the former Soviet Union.
The sorties were timed so that the RC-135 would be flying well outside the borders of a foreign country at about thirty thousand feet with all its sophisticated electronic equipment up and running, while the SR-71 flew at Mach 3+ much closer to the border. Many early-warning radar and SAM radar operators attempted to locate, track, and lock onto the SR-71 while the RC-135 was recording all their electronic signals. One coordinated mission flown in 1978 out of Mildenhall with an RC-135 was the first time significant ELINT was ever recorded from the Soviets’ SA-5 missile. At Det 4, the SR-71 also flew coordinated sorties with the British RAF Nimrod aircraft and the German Atlantiques aircraft, gathering ELINT.
No SR-71 has ever been lost or damaged due to hostile action. The aircraft was extremely difficult for enemy radars to find. Featuring the original stealth technology, the SR-71’s wings, tail, and fuselage were coated with iron ferrites to absorb radar energy rather than returning it to the sender. In effect, the SR-71 became the first stealth airplane. Its radar cross-section (a measure of radar reflectivity) was significantly lower than the numbers the B-1B bomber was able to achieve more than twenty-five years later. At cruise speed and altitude, the radar cross-section of the SR-71 represented a target the size of a J-3 Piper Cub. For comparison purposes, the radar cross-section of an F-15 fighter is somewhere around one hundred square meters. Even if the SR-71 could be found on radar, its detection was so late that there was simply not enough time for a missile to compute the lead for a successful kill.
The only published and Air Force–acknowledged missile firing at an SR-71 occurred on 26 August 1981. SR-71 pilot Major Maury Rosenberg and RSO Major E. D. McKim were making their final pass through the Korean DMZ, heading southwest, when North Korea fired two Soviet SA-2 SAMs at their aircraft. Major McKim was the first to notice anything out of the ordinary by his DEF indications in the cockpit. He looked to the right just in time to see the missiles go by in the distance. The incident caused quite an uproar in the press, and Habus became much more cautious in future passes through the Korean DMZ. The former head of Lockheed’s Skunk Works, Ben Rich, states in his book, Skunk Works, that over one hundred missiles have been fired unsuccessfully at the SR-71 throughout its history.
Even though the aircraft was difficult to find and track on radar, the SR-71 carried very sophisticated electronic countermeasures (ECM) equipment to electronically jam and deny the enemy our range and bearing. All the DEF systems were on the RSO’s left console. He could control the jammers manually or let them run in the automatic mode to electronically jam a specific threat frequency.
The DEF systems were constantly updated to counter the latest enemy early-warning radars, SAMs, and air-to-air radar-guided missiles. Each DEF upgrade on the SR-71 was assigned an increasing letter of the alphabet. Throughout my time with the program, we used DEFs A, B, C, E/F, G, A2, C2, H, M, and the very latest, A2C. Depending in what part of the world the SR-71 flew, the DEF software was modified to counter the changing electronic threats. Whenever the United States acquired the latest Soviet radar technology, SR-71 sorties were flown against the Soviet radar for evaluation purposes. These sorties were flown over the highly classified area north of Las Vegas, Nevada, known popularly as Groom Lake, Area 51, or the Ranch.
Turning the DEF system on made some Habus apprehensive and for good reasons. On two occasions, turning the DEF systems on at Mach 3 created problems for which no one was prepared. In the mid-1970s, Colonel (Ret.) Bob Helt and Colonel (Ret.) Larry Elliot were flying an SR-71 out of Det 1 on a night operational sortie. When Larry turned on the DEF set, the aircraft immediately experienced an electrical power surge that disengaged all of the SAS channels. Bob experienced severe unstarts and large excursions of the aircraft in pitch and roll. Fortunately, Larry instinctively realized the cause-and-effect relationship and quickly turned off the DEF system. After a wild night ride, consisting of unusual attitude recoveries and restarting the inlets, Bob finally brought the aircraft under control, re-engaged the SAS, and aborted the mission. A similar situation occurred with the crew of majors “Stormy” Boudreaux and Ted Ross, flying an operational sortie out of Beale in 1985. When Ted turned on the DEF set, all three DAFICS computers shut down, leaving Stormy with his hands full of a Mach 3 airplane. In both cases, the sudden, large electrical demands created perturbations, causing the computers and their associated SAS and inlet controls to shut down.
On 6 September 1976, Soviet pilot Lieutenant Viktor Belenko defected to Japan in a MiG-25. Subsequently, he wrote a book titled MiG Pilot in which he described the intercept problem:
[The Soviets] had a master plan to intercept an SR-71 by positioning a MiG-25 in front of it and one below it, and when the SR-71 passed they would fire missiles. But it never occurred. Soviet computers were very primitive, and there is no way that mission can be accomplished.
First of all, the SR-71 flies too high and too fast. The MiG-25 cannot reach it or catch it. Secondly, as I mentioned, the missiles are useless above twenty-seven thousand meters, and as you know, the SR-71 cruises much higher. But even if we could reach it, our missiles lack the velocity to overtake the SR-71 if they are fired in a tail chase. And if they are fired head-on, their guidance systems cannot adjust quickly enough to the high closing speed.
Many Habus flew Tomcat Chase and Eagle Bait training sorties against our best fighters, the Navy’s F-14 and the Air Force’s F-15. They flew the SR-71 to provide the fighters practice at finding, tracking, locking on, intercepting, and simulated firing of their sophisticated missiles—the F-14’s Phoenix missile and the F-15’s AIM-7M Sparrow—at a high-altitude, high-speed target. The Tomcat Chase missions were flown over the Pacific Ocean and Eagle Bait missions in the Nellis AFB training area.
In order to maximize scarce, high-altitude/high-speed intercept practice for the fighters against the SR-71, we stacked the deck in their favor to avoid a multitude of missed intercepts and, consequently, wasted time. The practice intercepts were conducted in a highly controlled environment, favoring a successful outcome by the fighters. Both the SR-71 and fighters were on a common ground control intercept (GCI) frequency so the fighters could be vectored for the head-on intercept and the crews could talk to each other to help set it up. Habus flew a precise straight-line track that was made known to the GCI controller and the fighters well in advance of our arrival. All aircraft had their transponders on for positive radar identification and were not allowed to use DEF systems. On the initial missions, the SR-71s even had visual-identification white stripes painted on the bottom of the fuselages, could not exceed Mach 2.8, and announced over the radio the distance to go for the interceptors.
Crews kept the SR-71 at a constant altitude, airspeed, and heading as the fighters maneuvered for their head-on attack. GCI controllers provided constant range and bearing for the fighters to their target SR-71 so they could begin searching on their aircraft radar. Even under these highly controlled flying conditions, the F-14s and F-15s had extreme difficulty achieving a satisfactory kill. All we ever heard on the radios from the fighters as they raced by well below us was, “Ah, dammit, we’re too late!”
The majority of missed intercepts from the fighters were because of two parameters that greatly influence the intercept geometry: the altitude difference between the SR-71 and the fighters, and the extreme closing velocity between the two aircraft. At the start of the Eagle Bait missions, the F-15s discovered that their fire control system (FCS) speed gate (the computed closing velocity between the interceptor and the target) was not large enough to accommodate their extreme closing velocity against the SR-71. Software changes to the FCS computers solved the problem. If the fighters didn’t climb and remain at twenty-five thousand feet, for example, their missiles found it extremely difficult to climb up fifty-five thousand feet against gravity to achieve a kill against the SR-71.
Several factors further complicated matters for the fighters. Air-to-air missiles are aerodynamically optimized for maneuvering in the thicker air below fifty thousand feet. Their small aerodynamic fins do not provide sufficient maneuverability to make tight turns in the thin air of eighty thousand feet. As a missile races toward the SR-71 at Mach 3 or greater, the closing velocity between the two approaches Mach 6, or about one mile every second! The missile’s impact point in front of the SR-71 has to be perfectly predicted early on by the fighter’s computers. As they race toward each other, it becomes increasingly difficult for the missile to do any last-minute maneuvering. Proximity fusing of missiles, like the Mach 3 AIM-7M Sparrow, requires the missile to explode in front of its target, projecting the force of its exploding warhead forward for the kill.
Until the latest technology of air-to-air missiles came along (like the AMRAAM, a fire-and-forget missile with a range of about thirty-five miles), all long-range Soviet and U.S. missiles required the aircraft’s radar to continue tracking the SR-71 after the missiles were launched. The radar had to remain locked onto the SR-71 in order for the aircraft’s FCS to relay tracking information back to the missile so it could make appropriate corrections as it raced toward its target. By turning DEF systems on, Habus could easily deny most fighters the meaningful radar information needed to guide their missiles.
When military pilots fly, they focus primarily on the mission rather than the plane itself. That mission might be bombs on target, delivering cargo, transferring fuel, or even training student pilots. Most military pilots worry little about their aircraft. Not so with the SR-71! The primary focus of an SR-71 pilot was on the plane, not the mission. Getting the Blackbird to Mach 3+ cruise was paramount, and once there, it was vital to maintain the speed. Many flying parameters had to be taken into account and overcome to keep the plane flying efficiently at Mach 3+.
The pilot’s objective throughout all turns was to fly as close as possible to a constant ground speed. If the ground speed remained constant, the bank angle should remain constant as well. If the crew didn’t pay close attention during turns and the ground speed increased, the bank angle increased up to the ANS limits of thirty-five or forty-five degrees, keeping the SR-71 on track. If that didn’t do it, the aircraft slid outside the turn radius. Quite often, the sensors were working during turns and required a specific bank angle to cover the area of interest. By varying bank angles from those programmed or sliding outside the turn, it was possible to miss imaging the target(s) completely.
Wind velocity in the typical cruising altitude range of seventy to eighty thousand feet probably averaged five to ten knots for the majority of the Northern Hemisphere. However, in 1976, while flying SR-71 missions out of Mildenhall into the Barents Sea area, crews discovered wind velocities well over one hundred knots at seventy-five thousand feet! The flight tracks required Habus to hold a constant ground speed during turns. One hundred knots of wind could easily drift the SR-71 off the black line and into airspace that had major political consequences . . . such as the Soviet Union!
As the SR-71 entered each turn, the pilot increased each throttle an additional three thousand pounds per hour on the engine’s fuel-flow gauge to hold the Mach. Constant altitude turns of up to thirty-five degrees of bank could normally be made at maximum-range cruise altitude by merely adding power. Once established in the turn, very small throttle movements held the Mach constant.
During steep bank turns (more than thirty-five degrees), it was not always possible to maintain cruise altitude. Whenever the aircraft became power limited during a steep banked turn, it was better to lose altitude to maintain the Mach than to lose Mach and maintain altitude. Pilots anticipated and evaluated the possible need for a descent prior to every forty-five-degree bank turn, particularly if temp devs were hotter than standard. Generally, a descent of two to three thousand feet from the maximum-range cruise altitude would sustain a level forty-five-degree banked turn at Mach 3.0. After rolling out, the pilot climbed back up to the maximum-range cruise altitude unless he was approaching another forty-five-degree banked turn soon.
Each inlet was biased by the AIC to a slightly more conservative spike and door position during turns at supersonic speeds, reducing the possibility of unstarts. Each inlet was specifically biased for increased load factors (g-loading), increased AOA, and sideslip (yaw). As the aircraft entered each turn, the forward bypass doors were biased slightly more open, and the spikes moved forward a small amount. Every time the Blackbird went into a turn, the biasing was evident by watching the forward bypass doors open up, as indicated on the gauges.
If the pilot saw the forward bypass doors open further than he liked (creating excessive drag), he placed the aft bypass doors to the A position, closing down the forward bypass doors and increasing fuel efficiency throughout the turn. There was one major problem in using this fuel-saving technique. The pilot had to pay close attention to when the plane was about to roll out of the turn. If he didn’t move the aft bypass back to the CLOSE position during the rollout, he was setting himself up for a possible unstart.
After the initial level-off, it was a good time to look in the periscope to see if the rudders were centered. Looking at the left rudder, the pilot moved the rudder trim switch on the stick either left or right to streamline the rudder so it was perfectly aligned with the fixed base of the rudder mounted on the engine nacelle. Then he rotated the periscope to look at the right rudder and moved the right-hand rudder synchronizer switch to align it as well. It was necessary to check the rudders periodically throughout the mission to make sure they were still aligned. Heating of the hydraulic fluid and rudder actuators would often cause the rudders to become misaligned during the mission.
The automatic fuel sequencing was designed to keep the center of gravity aft. However, during the later stages of cruise, the pilot typically had to manually control the CG by transferring fuel to keep the CG as close as possible to the supersonic aft limit of twenty-five percent. This minimized drag caused by elevon deflection if the CG was too far forward.
The SR-71’s cruise performance was not like that of any other jet aircraft. In other jets, fuel consumption increased dramatically the faster you went, particularly if you lit the ABs. The SR-71 was just the opposite: the faster you flew the more fuel efficient it became. For example, the range charts show for a standard day temperature (-56 degrees Celsius), a 100,000-pound gross weight SR-71 flying at Mach 3.0 maximum-cruise range has a total fuel flow of thirty-eight thousand pounds per hour. Accelerate to Mach 3.15, and the total fuel flow drops down to thirty-six thousand pounds per hour. The faster you flew the SR-71, the more it became a ramjet, utilizing the high-Mach air to augment the thrust of the engines.
The only weather that crews had to contend with above sixty thousand feet was wind and temp devs. Throughout the accel and cruise, pilots paid attention to temp devs because they either dramatically helped or hindered aircraft performance. The biggest influence on aircraft performance was hot temp devs during the accel. During the accel, the inlets were not as efficient, because the forward bypass doors opened more and decreased the rate of climb. You could literally feel the Blackbird slow down its rate of climb and acceleration.
To illustrate the effect temperatures have on the climb, we’ll assume the SR-71 has just refueled to full tanks and used about five thousand pounds of fuel for the subsonic climb and dipsy doodle maneuver, leaving a gross weight of approximately 135,000 pounds to begin its accel to Mach 3. Taking a 135,000-pound gross weight aircraft from Mach 1.25 at thirty thousand feet to Mach 3.0 at seventy thousand feet with a +10 degrees Celsius temp dev burns around twenty-eight thousand pounds of fuel. Under the same parameters, but with the climb temp dev now at -10 degrees Celsius, the SR-71 only burns around sixteen thousand pounds of fuel. That’s twelve thousand pounds of fuel difference from a twenty-degree Celsius temperature spread!
At cruise, temp devs had a similar effect on performance, although not as dramatic as during the climb. For example, a 100,000-pound SR-71 at Mach 3 and a temp dev of -10 degrees Celsius has a total fuel flow of around thirty-five thousand pounds per hour. With a temp dev of +10 degrees Celsius, the total fuel flow jumps to around forty-four thousand pounds per hour. That adds a total fuel flow increase of about nine thousand pounds per hour for a temperature change of twenty degrees Celsius. On a one-hour cruise leg at Mach 3.0, you could not afford to be down nine thousand pounds of fuel.
Fortunately, the accel and cruise temp devs were seldom as large as the above examples. In many of our flying locations, it was impossible for weather forecasters to obtain accurate temp devs. In-flight temperatures also changed as the SR-71 cruised over long distances, hitting pockets of hot and cold air masses at seventy thousand feet and above. Temp devs climbing out of one refueling track could be considerably different from another refueling two thousand miles away. Needless to say, Habus monitored the CIT gauge to compute the outside air temperature and compared it against fuel consumption. If the crew members found themselves behind on the fuel curve, they tried every trick in the book to catch up.
Although the SR-71’s cruise fuel flows were quite large, the range of the aircraft compared favorably with some commercial jet airliners. Jet aircraft compare cruise fuel efficiency in terms of how many nautical miles an airplane can fly burning one thousand pounds of fuel. At Mach 3.2 and standard day temperatures, the range of the SR-71 at a gross weight of ninety thousand pounds is 54.1 nautical miles per one thousand pounds of fuel at an altitude of 78,700 feet. By way of comparison, a McDonnell Douglas DC-10 (three engines) cruising at forty-one thousand feet and Mach 0.84 at an average gross weight has a range of only 38.4 nautical miles per one thousand pounds of fuel.
After the SR-71 cruised at Mach 3+ for around twenty minutes, the aircraft had heated up to cruise temperatures, which ranged from 500 degrees Fahrenheit on all the leading edges up to 1,100 degrees Fahrenheit at the exhaust nozzle area. Many of the emergencies crews had to deal with stemmed from heating problems. It might have been a wire bundle getting too hot, creating stray electrons to computers, or heat associated within the fuel hydraulic system.
The SR-71 was one of the few (possibly the only) aircraft that actually used its fuel as hydraulic fluid to actuate certain engine components. Each engine utilized a fuel-hydraulic system for actuation of the afterburner exhaust nozzles and several engine bleed valves, as well as shifting of the inlet guide vanes. As fuel became hotter during flight, it often created problems with the fuel-hydraulic components. The primary culprits were the afterburner exhaust nozzles. Sometimes the nozzles would fully open up or close down completely and not move as they should in response to the afterburner throttle position. Once the plane air-refueled, cold fuel from the tanker often made the afterburner nozzle problem disappear.
As a general rule, if the aircraft performed satisfactorily after twenty or thirty minutes of Mach 3 flight, it typically continued to do so for the remainder of the mission. Shortly after level-off, with everything squared away, the crew could relax (slightly!) for the first time and take in the sights of Mach 3 cruise at seventy-two thousand feet. However, just about the time you thought the aircraft was running perfectly, it would turn around and bite, grabbing your attention!
Above eighty thousand feet, the horizon-to-horizon view of the ground beneath was tremendous, providing a pronounced view of the curvature of the earth. Colors in the sky were deeper and more vivid—the sun so brilliant that it washed out cockpit instrumentation as it moved across the panel during turns. In the daytime, the horizon was a deep blue. Looking above the horizon, it changed to a deep purple, slowly changing to the black of night as the crew looked higher and higher. Peering upward into the dark sky, stars were visible in the daytime.
Some of the most notable sights occurred at night crossing the North Atlantic Ocean en route to RAF Mildenhall. The Aurora Borealis (Northern Lights) viewed from eighty thousand feet on a clear night was a spectacle of brilliant green and blue colors. It surrounded the Blackbird in what appeared to be colorful sheets, moving and waving about the entire time, then disappearing rapidly as the sun began to appear in the east. At night, all the stars were much brighter, appearing to be three-dimensional against their black background. It seemed as if you could actually reach out and touch one. To enjoy the Northern Lights and stars even more, crews found that dimming the cockpit lights heightened the visual experience.
At Mach 3 cruising altitudes, there was very little sensation of traveling at 2,100 miles per hour. There was a much greater sensation of speed when flying one of the T-38s on a low-level navigation route at 360 KIAS at one thousand feet above the ground. The only sense of speed was watching the distance-measuring equipment (DME) click off at thirty-three miles every minute. More than a speed sensation, Habus gained a deep appreciation of time and distance relationships. To be able to fly from California to England in only four hours, or to Japan in five hours, was a remarkable feat for any aircraft.
As the Blackbird approached the sensitive area, each crew member became more focused and gained an increased sense of awareness. The sensitive area was that airspace where anything and everything was possible. It might be Soviet MiGs trying to intercept the plane or SAMs launched in an attempt to shoot us down. It could also be the airspace where nothing at all happened; you just never knew. Time in the sensitive area varied with every mission but was normally between five and fifteen minutes.
Prior to entering the sensitive area, the crew had a checklist to accomplish. The first item was disarming the parachute emergency locator beacon plunger on the right shoulder harness by pulling it downward. If the crew ejected, the locator beacon automatically activated to alert rescue forces as to their where-abouts—not good if coming down over unfriendly territory! The next item was to place the TACAN set to receive only. This was not the time to be transmitting anything. The last item was to set the interphone as desired, generally to hot mike.
Flying in hostile areas, crews had a higher set of limits, which they could apply in an emergency, called the “tactical limits.” If they found the normal operating restrictions unacceptable because of a hostile environment (direct threat to the aircraft), the pilot was authorized to use the tactical limits spelled out in the Dash-1. The margin of safety provided by the tactical limits was substantially reduced, and exposure to these limits had to be as brief as possible. They were to be used only when adherence to normal or emergency restrictions would place the aircraft in a more hazardous situation because of possible hostile actions. By applying the tactical limits, the crew could exit a hostile area at high Mach and altitude for a brief time.
On all operational missions, crews monitored a specific HF radio frequency, listening for important information. On a few occasions, the SR-71 had to be called back to the det because of impending or rapidly deteriorating weather conditions. If other national reconnaissance systems thought the SR-71 was straying off the black line, the crews were issued a coded HF warning telling them to recheck their navigation system for accuracy. If the coded message authenticated properly and all the navigational systems checked out, Habus pressed on.
Other than the HF radio crackling in the background, the only communication was between the pilot and RSO. Flying as a formed crew paid off in that situation. Most Habus were go-oriented and instinctively knew neither one would abort a mission unless it was absolutely necessary. There could be no confusion about aborting or pressing on.
After exiting the sensitive area, the crews reversed the checklist procedures, and the RSO made his coded “ops normal” call on the HF radio to let everyone know the mission was successful thus far and everything was going smoothly. The HF radio was continuously used by aircraft all around the world, sending out coded messages; our transmissions didn’t sound different from any others.
Night-flying training at Beale was basically an orientation in flying the aircraft at night. All the credit for the start of our aggressive entry into operational reconnaissance sorties at night is due to the work of Lieutenant Colonel Bob Cunningham, one of the Det 1 commanders in the late 1970s. Bob had the foresight and vision necessary to keep the SR-71 viable for the future. He knew eventually the Blackbird would have to compete with other national reconnaissance systems that were starting to gather intelligence twenty-four hours a day. Bob’s thinking and probing were exactly what the program needed at the time. He tried to get away from the traditional ways of employing the plane and to stimulate new thoughts and ideas. As radical as his ideas seemed at the time, he was always thinking about what was best for the program.
Habus were not overjoyed about operational night flying. Crews resisted Bob’s initiatives toward night flying by trying to show just how dangerous it was. However, as Bob predicted, operational night flying would become a routine part of our worldwide reconnaissance-collection capability.