
As there are  such partitions (there are
such partitions (there are  ways of choosing a nonempty proper subset
ways of choosing a nonempty proper subset  and, as the partition
and, as the partition  is the same as
is the same as  , we must divide by 2) there are therefore this number of minimal cut sets.
, we must divide by 2) there are therefore this number of minimal cut sets.
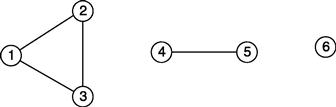
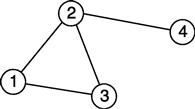
To determine the minimal path sets, we must characterize a minimal set of arcs that results in a connected graph. The graph in Figure 9.13 is connected but it would remain connected if any one of the arcs from the cycle shown in Figure 9.14 were removed. In fact it is not difficult to see that the minimal path sets are exactly those sets of arcs that result in a graph being connected but not having any cycles (a cycle being a path from a node to itself). Such sets of arcs are called spanning trees (Figure 9.15). It is easily verified that any spanning tree contains exactly  arcs, and it is a famous result in graph theory (due to Cayley) that there are exactly
arcs, and it is a famous result in graph theory (due to Cayley) that there are exactly  of these minimal path sets.
of these minimal path sets.
Because of the large number of minimal path and minimal cut sets ( and
and  , respectively), it is difficult to obtain any useful bounds without making further restrictions. So, let us assume that all the
, respectively), it is difficult to obtain any useful bounds without making further restrictions. So, let us assume that all the  equal the common value
equal the common value  . That is, we suppose that each of the possible arcs exists, independently, with the same probability
. That is, we suppose that each of the possible arcs exists, independently, with the same probability  . We shall start by deriving a recursive formula for the probability that the graph is connected, which is computationally useful when
. We shall start by deriving a recursive formula for the probability that the graph is connected, which is computationally useful when  is not too large, and then we shall present an asymptotic formula for this probability when
is not too large, and then we shall present an asymptotic formula for this probability when  is large.
is large.
Let us denote by  the probability that the random graph having
the probability that the random graph having  nodes is connected. To derive a recursive formula for
nodes is connected. To derive a recursive formula for  we first concentrate attention on a single node—say, node 1—and try to determine the probability that node 1 will be part of a component of size
we first concentrate attention on a single node—say, node 1—and try to determine the probability that node 1 will be part of a component of size  in the resultant graph. Now, for a given set of
in the resultant graph. Now, for a given set of  other nodes these nodes along with node 1 will form a component if
other nodes these nodes along with node 1 will form a component if
(i) there are no arcs connecting any of these  nodes with any of the remaining
nodes with any of the remaining  nodes;
nodes;
(ii) the random graph restricted to these  nodes (and
nodes (and  potential arcs—each independently appearing with probability
potential arcs—each independently appearing with probability  ) is connected.
) is connected.
The probability that (i) and (ii) both occur is

where  . As there are
. As there are  ways of choosing
ways of choosing  other nodes (to form along with node 1 a component of size
other nodes (to form along with node 1 a component of size  ) we see that
) we see that
Now, since the sum of the foregoing probabilities as  ranges from 1 through
ranges from 1 through  clearly must equal 1, and as the graph is connected if and only if node 1 is part of a component of size
clearly must equal 1, and as the graph is connected if and only if node 1 is part of a component of size  , we see that
, we see that
 (9.9)
(9.9)
Starting with  , Equation (9.9) can be used to determine
, Equation (9.9) can be used to determine  recursively when
recursively when  is not too large. It is particularly suited for numerical computation.
is not too large. It is particularly suited for numerical computation.
To determine an asymptotic formula for  when
when  is large, first note from Equation (9.9) that since
is large, first note from Equation (9.9) that since  , we have
, we have
As it can be shown that for  and
and  sufficiently large,
sufficiently large,

we have that for  large
large
 (9.10)
(9.10)
To obtain a bound in the other direction, we concentrate our attention on a particular type of minimal cut set—namely, those that separate one node from all others in the graph. Specifically, define the minimal cut set  as
as

and define  to be the event that all arcs in
to be the event that all arcs in  are not working (and thus, node
are not working (and thus, node  is isolated from the other nodes). Now,
is isolated from the other nodes). Now,

since, if any of the events  occur, then the graph will be disconnected. By the inclusion–exclusion bounds, we have
occur, then the graph will be disconnected. By the inclusion–exclusion bounds, we have

As  and
and  are just the respective probabilities that a given set of
are just the respective probabilities that a given set of  arcs and a given set of
arcs and a given set of  arcs are not in the graph (why?), it follows that
arcs are not in the graph (why?), it follows that
and so
Combining this with Equation (9.10) yields that for  sufficiently large,
sufficiently large,

and as
as  , we see that, for large
, we see that, for large  ,
,
Thus, for instance, when  and
and  , the probability that the random graph will be connected is approximately given by
, the probability that the random graph will be connected is approximately given by




9.4.2 Second Method for Obtaining Bounds on r(p)
Our second approach to obtaining bounds on  is based on expressing the desired probability as the probability of the intersection of events. To do so, let
is based on expressing the desired probability as the probability of the intersection of events. To do so, let  denote the minimal path sets as before, and define the events,
denote the minimal path sets as before, and define the events,  by
by

Now since the system will have failed if and only if at least one component in each of the minimal path sets has failed we have
 (9.11)
(9.11)Now it is quite intuitive that the information that at least one component of  is down can only increase the probability that at least one component of
is down can only increase the probability that at least one component of  is down (or else leave the probability unchanged if
is down (or else leave the probability unchanged if  and
and  do not overlap). Hence, intuitively
do not overlap). Hence, intuitively

To prove this inequality, we write
 (9.12)
(9.12)and note that
Hence, from Equation (9.12) we see that

or

By the same reasoning, it also follows that

and so from Equation (9.11) we have

or, equivalently,
To obtain a bound in the other direction, let  denote the minimal cut sets and define the events
denote the minimal cut sets and define the events  by
by

Then, since the system will function if and only if all of the events  occur, we have
occur, we have

where the last inequality is established in exactly the same manner as for the  . Hence,
. Hence,
and we thus have the following bounds for the reliability function:
 (9.13)
(9.13)
It is to be expected that the upper bound should be close to the actual  if there is not too much overlap in the minimal path sets, and the lower bound to be close if there is not too much overlap in the minimal cut sets.
if there is not too much overlap in the minimal path sets, and the lower bound to be close if there is not too much overlap in the minimal cut sets.
Example 9.19
For the three-out-of-four system the minimal path sets are  , and
, and  ; and the minimal cut sets are
; and the minimal cut sets are  ,
,  , and
, and  . Hence, by Equation (9.13) we have
. Hence, by Equation (9.13) we have

where  . For instance, if
. For instance, if  for all
for all  , then the preceding yields
, then the preceding yields

The exact value for this structure is easily computed to be

9.5 System Life as a Function of Component Lives
For a random variable having distribution function  , we define
, we define  to be the probability that the random variable is greater than
to be the probability that the random variable is greater than  .
.
Consider a system in which the  th component functions for a random length of time having distribution
th component functions for a random length of time having distribution  and then fails. Once failed it remains in that state forever. Assuming that the individual component lifetimes are independent, how can we express the distribution of system lifetime as a function of the system reliability function
and then fails. Once failed it remains in that state forever. Assuming that the individual component lifetimes are independent, how can we express the distribution of system lifetime as a function of the system reliability function  and the individual component lifetime distributions
and the individual component lifetime distributions  ?
?
To answer this we first note that the system will function for a length of time  or greater if and only if it is still functioning at time
or greater if and only if it is still functioning at time  . That is, letting
. That is, letting  denote the distribution of system lifetime, we have
denote the distribution of system lifetime, we have

But, by the definition of  we have
we have

where
Hence, we see that
 (9.14)
(9.14)Example 9.20
In a series system,  and so from Equation (9.14)
and so from Equation (9.14)

which is, of course, quite obvious since for a series system the system life is equal to the minimum of the component lives and so will be greater than  if and only if all component lives are greater than
if and only if all component lives are greater than  . ■
. ■
Example 9.21
In a parallel system  and so
and so

The preceding is also easily derived by noting that, in the case of a parallel system, the system life is equal to the maximum of the component lives. ■
For a continuous distribution  , we define
, we define  , the failure rate function of
, the failure rate function of  , by
, by

where  . In Section 5.2.2, it is shown that if
. In Section 5.2.2, it is shown that if  is the distribution of the lifetime of an item, then
is the distribution of the lifetime of an item, then  represents the probability intensity that a
represents the probability intensity that a  -year-old item will fail. We say that
-year-old item will fail. We say that  is an increasing failure rate (IFR) distribution if
is an increasing failure rate (IFR) distribution if  is an increasing function of
is an increasing function of  . Similarly, we say that
. Similarly, we say that  is a decreasing failure rate (DFR) distribution if
is a decreasing failure rate (DFR) distribution if  is a decreasing function of
is a decreasing function of  .
.
Example 9.22
The Weibull Distribution
A random variable is said to have the Weibull distribution if its distribution is given, for some  , by
, by

The failure rate function for a Weibull distribution equals

Thus, the Weibull distribution is IFR when  , and DFR when
, and DFR when  ; when
; when  , the exponential distribution, which is both IFR and DFR. ■
, the exponential distribution, which is both IFR and DFR. ■
Example 9.23
The Gamma Distribution
A random variable is said to have a gamma distribution if its density is given, for some  , by
, by

where
For the gamma distribution,

With the change of variables  , we obtain
, we obtain

Hence,  is IFR when
is IFR when  and is DFR when
and is DFR when  . ■
. ■
Suppose that the lifetime distribution of each component in a monotone system is IFR. Does this imply that the system lifetime is also IFR? To answer this, let us at first suppose that each component has the same lifetime distribution, which we denote by  . That is,
. That is,  . To determine whether the system lifetime is IFR, we must compute
. To determine whether the system lifetime is IFR, we must compute  , the failure rate function of
, the failure rate function of  . Now, by definition,
. Now, by definition,
where

Hence,
 (9.15)
(9.15)
Since  is a decreasing function of
is a decreasing function of  , it follows from Equation (9.15) that if each component of a coherent system has the same IFR lifetime distribution, then the distribution of system lifetime will be IFR if
, it follows from Equation (9.15) that if each component of a coherent system has the same IFR lifetime distribution, then the distribution of system lifetime will be IFR if  is a decreasing function of
is a decreasing function of  .
.
Example 9.24
The k  -out-of-
-out-of-n  System with Identical Components
System with Identical Components
Consider the  -out-of-
-out-of- system, which will function if and only if
system, which will function if and only if  or more components function. When each component has the same probability
or more components function. When each component has the same probability  of functioning, the number of functioning components will have a binomial distribution with parameters
of functioning, the number of functioning components will have a binomial distribution with parameters  and
and  . Hence,
. Hence,
which, by continual integration by parts, can be shown to be equal to

Upon differentiation, we obtain

Therefore,
Letting  yields
yields
Since  is increasing in
is increasing in  , it follows that
, it follows that  is decreasing in
is decreasing in  . Thus, if a
. Thus, if a  -out-of-
-out-of- system is composed of independent, like components having an increasing failure rate, the system itself has an increasing failure rate. ■
system is composed of independent, like components having an increasing failure rate, the system itself has an increasing failure rate. ■
It turns out, however, that for a  -out-of-
-out-of- system, in which the independent components have different IFR lifetime distributions, the system lifetime need not be IFR. Consider the following example of a two-out-of-two (that is, a parallel) system.
system, in which the independent components have different IFR lifetime distributions, the system lifetime need not be IFR. Consider the following example of a two-out-of-two (that is, a parallel) system.
Example 9.25
A Parallel System That Is Not IFR
The life distribution of a parallel system of two independent components, the  th component having an exponential distribution with mean
th component having an exponential distribution with mean  , is given by
, is given by
Therefore,
It easily follows upon differentiation that the sign of  is determined by
is determined by  , which is positive for small values and negative for large values of
, which is positive for small values and negative for large values of  . Therefore,
. Therefore,  is initially strictly increasing, and then strictly decreasing. Hence,
is initially strictly increasing, and then strictly decreasing. Hence,  is not IFR. ■
is not IFR. ■
Remark
The result of the preceding example is quite surprising at first glance. To obtain a better feel for it we need the concept of a mixture of distribution functions. The distribution function  is said to be a mixture of the distributions
is said to be a mixture of the distributions  and
and  if for some
if for some  ,
,
 (9.16)
(9.16)
Mixtures occur when we sample from a population made up of two distinct groups. For example, suppose we have a stockpile of items of which the fraction  are type 1 and the fraction
are type 1 and the fraction  are type 2. Suppose that the lifetime distribution of type 1 items is
are type 2. Suppose that the lifetime distribution of type 1 items is  and of type 2 items is
and of type 2 items is  . If we choose an item at random from the stockpile, then its life distribution is as given by Equation (9.16).
. If we choose an item at random from the stockpile, then its life distribution is as given by Equation (9.16).
Consider now a mixture of two exponential distributions having rates  and
and  where
where  . We are interested in determining whether or not this mixture distribution is IFR. To do so, we note that if the item selected has survived up to time
. We are interested in determining whether or not this mixture distribution is IFR. To do so, we note that if the item selected has survived up to time  , then its distribution of remaining life is still a mixture of the two exponential distributions. This is so since its remaining life will still be exponential with rate
, then its distribution of remaining life is still a mixture of the two exponential distributions. This is so since its remaining life will still be exponential with rate  if it is type 1 or with rate
if it is type 1 or with rate  if it is a type 2 item. However, the probability that it is a type 1 item is no longer the (prior) probability
if it is a type 2 item. However, the probability that it is a type 1 item is no longer the (prior) probability  but is now a conditional probability given that it has survived to time
but is now a conditional probability given that it has survived to time  . In fact, its probability of being a type 1 is
. In fact, its probability of being a type 1 is

As the preceding is increasing in  , it follows that the larger
, it follows that the larger  is, the more likely it is that the item in use is a type 1 (the better one, since
is, the more likely it is that the item in use is a type 1 (the better one, since  ). Hence, the older the item is, the less likely it is to fail, and thus the mixture of exponentials far from being IFR is, in fact, DFR.
). Hence, the older the item is, the less likely it is to fail, and thus the mixture of exponentials far from being IFR is, in fact, DFR.
Now, let us return to the parallel system of two exponential components having respective rates  and
and  . The lifetime of such a system can be expressed as the sum of two independent random variables, namely,
. The lifetime of such a system can be expressed as the sum of two independent random variables, namely,

The first random variable whose distribution is exponential with rate  represents the time until one of the components fails, and the second, which is a mixture of exponentials, is the additional time until the other component fails. (Why are these two random variables independent?)
represents the time until one of the components fails, and the second, which is a mixture of exponentials, is the additional time until the other component fails. (Why are these two random variables independent?)
Now, given that the system has survived a time  , it is very unlikely when
, it is very unlikely when  is large that both components are still functioning, but instead it is far more likely that one of the components has failed. Hence, for large
is large that both components are still functioning, but instead it is far more likely that one of the components has failed. Hence, for large  , the distribution of remaining life is basically a mixture of two exponentials—and so as
, the distribution of remaining life is basically a mixture of two exponentials—and so as  becomes even larger its failure rate should decrease (as indeed occurs). ■
becomes even larger its failure rate should decrease (as indeed occurs). ■
Recall that the failure rate function of a distribution  having density
having density  is defined by
is defined by
By integrating both sides, we obtain

Hence,
 (9.17)
(9.17)
where
The function  is called the hazard function of the distribution
is called the hazard function of the distribution  .
.
Definition 9.1
A distribution  is said to have increasing failure on the average (IFRA) if
is said to have increasing failure on the average (IFRA) if
 (9.18)
(9.18)
increases in  for
for  .
.
In other words, Equation (9.18) states that the average failure rate up to time  increases as
increases as  increases. It is not difficult to show that if
increases. It is not difficult to show that if  is IFR, then
is IFR, then  is IFRA; but the reverse need not be true.
is IFRA; but the reverse need not be true.
Note that  is IFRA if
is IFRA if  whenever
whenever  , which is equivalent to
, which is equivalent to

But by Equation (9.17) we see that  , and so the preceding is equivalent to
, and so the preceding is equivalent to

or equivalently,

which, since log  is a monotone function of
is a monotone function of  , shows that
, shows that  is IFRA if and only if
is IFRA if and only if
 (9.19)
(9.19)
For a vector  we define
we define  . We shall need the following proposition.
. We shall need the following proposition.
Proposition 9.2
Any reliability function  satisfies
satisfies

Proof
We prove this by induction on  , the number of components in the system. If
, the number of components in the system. If  , then either
, then either  . Hence, the proposition follows in this case.
. Hence, the proposition follows in this case.
Assume that Proposition 9.2 is valid for all monotone systems of  components and consider a system of
components and consider a system of  components having structure function
components having structure function  . By conditioning upon whether or not the
. By conditioning upon whether or not the  th component is functioning, we obtain
th component is functioning, we obtain
 (9.20)
(9.20)
Now consider a system of components 1 through  having a structure function
having a structure function  . The reliability function for this system is given by
. The reliability function for this system is given by  ; hence, from the induction assumption (valid for all monotone systems of
; hence, from the induction assumption (valid for all monotone systems of  components), we have
components), we have

Similarly, by considering the system of components 1 through  and structure function
and structure function  , we obtain
, we obtain

Thus, from Equation (9.20), we obtain

which, by using the lemma to follow (with  ,
,  ), implies that
), implies that

which proves the result. ■
Lemma 9.3
If  , then
, then

for all  .
.
We are now ready to prove the following important theorem.
Proof
The distribution of system lifetime  is given by
is given by

Hence, since  is a monotone function, and since each of the component distributions
is a monotone function, and since each of the component distributions  is IFRA, we obtain from Equation (9.19)
is IFRA, we obtain from Equation (9.19)

which by Equation (9.19) proves the theorem. The last inequality followed, of course, from Proposition 9.2. ■
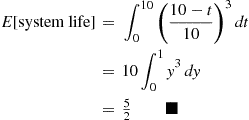
9.6 Expected System Lifetime
In this section, we show how the mean lifetime of a system can be determined, at least in theory, from a knowledge of the reliability function  and the component lifetime distributions
and the component lifetime distributions  .
.
Since the system’s lifetime will be  or larger if and only if the system is still functioning at time
or larger if and only if the system is still functioning at time  , we have
, we have

where  . Hence, by a well-known formula that states that for any nonnegative random variable
. Hence, by a well-known formula that states that for any nonnegative random variable  ,
,
we see that*
 (9.21)
(9.21)
Example 9.26
A Series System of Uniformly Distributed Components
Consider a series system of three independent components each of which functions for an amount of time (in hours) uniformly distributed over ( ). Hence,
). Hence,  and
and
Therefore,
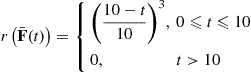
and so from Equation (9.21) we obtain
Example 9.27
A Two-out-of-Three System
Consider a two-out-of-three system of independent components, in which each component’s lifetime is (in months) uniformly distributed over ( ). As was shown in Example 9.13, the reliability of such a system is given by
). As was shown in Example 9.13, the reliability of such a system is given by

Since
we see from Equation (9.21) that