1 |
Prerequisites |
REVIEW LECTURE A |
These three optional lectures are going to be dull: they go over the same material that we went over before, adding absolutely nothing. So I’m very surprised to see so many people here. Frankly, I had rather hoped there would be fewer of you, and that these lectures wouldn’t be necessary.
The purpose of relaxing at this time is to give you time to think about things, to piddle around with the things that you heard about. That’s by all odds the most effective way of learning the physics: it’s not a good idea to come in and listen to some review; it’s better to make up the review for yourself. So I’d advise you—if you’re not too far lost, completely befuddled and confused—that you forget about these lectures and piddle around by yourself, and try to find out what’s interesting without grinding down some particular track. You’ll learn infinitely better and easier and more completely by picking a problem for yourself that you find interesting to fiddle around with—some kind of a thing that you heard that you don’t understand, or you want to analyze further, or want to do some kind of a trick with—that’s the best way to learn something.
The lectures that we have been giving so far are a new course, and have been designed to answer a problem we presumed existed: nobody knows how to teach physics, or to educate people—that’s a fact, and if you don’t like the way it’s being done, that’s perfectly natural. It’s impossible to teach satisfactorily: for hundreds of years, even more, people have been trying to figure out how to teach, and nobody has ever figured it out. So if this new course is not satisfactory, that’s not unique.
At Caltech we are always changing the courses in the hope of improving them, and this year we changed the physics course again. One of the complaints in the past was that the students who are nearer the top find the whole subject of mechanics dull: they would find themselves grinding along, doing problems, studying reviews, and doing examinations, and there was no time to think about anything; there was no excitement in it; there was no description of its relation to modern physics, or anything like that. And so this set of lectures was designed to be better that way, to a certain extent, to help out those fellows, and to make the subject more interesting, if possible, by connecting it to the rest of the universe.
On the other hand, this approach has the disadvantage that it confuses many people, because they don’t know what it is they’re supposed to learn—or, rather, that there’s so much stuff that they can’t learn all of it, and they haven’t got enough intelligence to figure out what is interesting to them, and to pay attention only to that.
Therefore, I’m addressing myself to those people who have found the lectures very confusing, very annoying, and irritating, in the sense that they don’t know what to study, and they’re kind of lost. The other people, who don’t feel as lost, shouldn’t be here, so I now give you the opportunity to go out . . .1
I see nobody has the nerve. Or I guess I’m a great failure, then, if I got everybody lost! (Maybe you’re just here for entertainment.)
Now, I am therefore imagining that one of you has come into my office and said, “Feynman, I listened to all the lectures, and I took that midterm exam, and I’m trying to do the problems, and I can’t do anything, and I think I’m in the bottom of the class, and I don’t know what to do.”
What would I say to you?
The first thing I would point out is this: to come to Caltech is an advantage in certain ways, and in other ways a disadvantage. Some of the ways that it’s an advantage you probably once knew, but now forget, and they have to do with the fact that the school has an excellent reputation, and the reputation is well deserved. There are pretty good courses. (I don’t know about this particular physics course; of course I have my own opinion about it.) The people who have come out the other end of Caltech, when they go into industry, or go to do work in research, and so forth, always say that they got a very good education here, and when they compare themselves with people who have gone to other schools (although many other schools are also very good) they never find themselves behind and missing something; they always feel they went to the best school of them all. So that’s an advantage.
But there is also a certain disadvantage: because Caltech has such a good reputation, almost everybody who’s the first or second in his high school class applies here. There are lots of high schools, and all the very best men2 apply. Now, we have tried to figure out a system of selection, with all kinds of tests, so that we get the best of the best. And so you guys have been very carefully picked out from all these schools to come here. But we’re still working on it, because we’ve found a very serious problem: no matter how carefully we select the men, no matter how patiently we make the analysis, when they get here something happens: it always turns out that approximately half of them are below average!
Of course you laugh at this because it’s self-evident to the rational mind, but not to the emotional mind—the emotional mind can’t laugh at this. When you’ve lived all the time as number one or number two (or even possibly number three) in high school science, and when you know that everybody who’s below average in the science courses where you came from is a complete idiot, and now you suddenly discover that you are below average—and half of you guys are—it’s a terrible blow, because you imagine that it means you’re as dumb as those guys used to be in high school, relatively. That’s the great disadvantage of Caltech: that this psychological blow is so difficult to take. Of course, I’m not a psychologist; I’m imagining all this. I don’t know how it would really be, of course!
The question is what to do if you find you’re below average. There are two possibilities. In the first place, you could find that it’s so difficult and annoying that you have to get out—that’s an emotional problem. You can apply your rational mind to that and point out to yourself what I just pointed out to you: that half of the guys in this place are going to be below average, even though they’re all tops, so it doesn’t mean anything. You see, if you can stick out that nonsense, that funny feeling, for four years, then you’ll go out into the world again, and you’ll discover that the world is just like it used to be—that when, for example, you get a job somewhere, you’ll find you’re Number One Man again, and you’ll get the great pleasure of being the expert they all come running to in this particular plant whenever they can’t figure out how to convert inches to centimeters! It’s true: the men who go out into industry, or go to a small school that doesn’t have an excellent reputation in physics, even if they’ve been in the bottom third, the bottom fifth, the bottom tenth of the class—if they don’t try to drive themselves (and I’ll explain that in a minute), then they’ll find themselves very much in demand, that what they learned here is very useful, and they’re back where they were before: happy, Number One.
On the other hand you can make a mistake: some people may drive themselves to a point where they insist they have to become Number One, and in spite of everything they want to go to graduate school and they want to become the best Ph.D. in the best school, even though they’re starting out at the bottom of the class here. Well, they are likely to be disappointed and to make themselves miserable for the rest of their lives being always at the bottom of a very first-rate group, because they picked that group. That’s a problem, and that’s up to you—it depends on your personality. (Remember, I’m talking to the guy who came into my office because he’s in the lowest tenth; I’m not talking to the other fellows who are happy because they happen to be in the upper tenth—that’s a minority anyway!)
So, if you can take this psychological blow—if you can say to yourself, “I’m in the lower third of the class, but a third of the guys are in the lower third of the class, because it’s got to be that way! I was the top guy in high school, and I’m still a smart son-of-a-gun. We need scientists in the country, and I’m gonna be a scientist, and when I get out of this school I’ll be all right, damn it! And I’ll be a good scientist!”—then it’ll be true: you will be a good scientist. The only thing is whether you can take the funny feelings during these four years, in spite of the rational arguments. If you find you can’t take the funny feelings, I suppose the best thing to do is to try to go somewhere else. It’s not a point of failure; it’s simply an emotional thing.
Even if you’re one of the last couple of guys in the class, it doesn’t mean you’re not any good. You just have to compare yourself to a reasonable group, instead of to this insane collection that we’ve got here at Caltech. Therefore, I am making this review purposely for the people who are lost, so that they have still a chance to stay here a little longer to find out whether or not they can take it, okay?
I make now one more point: that this is not a preparation for an examination, or anything like that. I don’t know anything about the examinations—I mean, I have nothing to do with making them up, and I don’t know what’s going to be on them, so there’s no guarantee whatsoever that what’s on the examination is only going to deal with the stuff reviewed in these lectures, or any nonsense of that kind.
So, this guy comes into my office and asks me to try to make everything straight that I taught him, and this is the best I can do. The problem is to try to explain the stuff that was being taught. So I start, now, with the review.
I would tell this guy, “The first thing you must learn is the mathematics. And that involves, first, calculus. And in calculus, differentiation.”
Now, mathematics is a beautiful subject, and has its ins and outs, too, but we’re trying to figure out what the minimum amount we have to learn for physics purposes are. So the attitude that’s taken here is a “disrespectful” one towards the mathematics, for sheer efficiency only; I’m not trying to undo mathematics.
What we have to do is to learn to differentiate like we know how much is 3 and 5, or how much is 5 times 7, because that kind of work is involved so often that it’s good not to be confounded by it. When you write something down, you should be able to immediately differentiate it without even thinking about it, and without making any mistakes. You’ll find you need to do this operation all the time—not only in physics, but in all the sciences. Therefore differentiation is like the arithmetic you had to learn before you could learn algebra.
Incidentally, the same goes for algebra: there’s a lot of algebra. We are assuming that you can do algebra in your sleep, upside down, without making a mistake. We know it isn’t true, so you should also practice algebra: write yourself a lot of expressions, practice them, and don’t make any errors.
Errors in algebra, differentiation, and integration are only nonsense; they’re things that just annoy the physics, and annoy your mind while you’re trying to analyze something. You should be able to do calculations as quickly as possible, and with a minimum of errors. That requires nothing but rote practice—that’s the only way to do it. It’s like making yourself a multiplication table, like you did in elementary school: they’d put a bunch of numbers on the board, and you’d go: “This times that, this times that,” and so on—Bing! Bing! Bing!
In the same way you must learn differentiation. Make a card, and on the card write a number of expressions of the following general type: for example,
and so on. Write, say, a dozen of these expressions. Then, every once in a while, just take the card out of your pocket, put your finger on an expression, and read out the derivative.
In other words, you should be able to see right away:
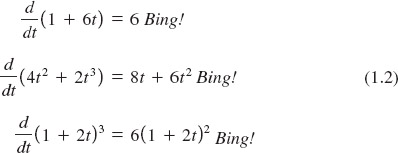
See? So the first thing to do is to memorize how to do derivatives—cold. That’s a necessary practice.
Now, for differentiating more complicated expressions, the derivative of a sum is easy: it’s simply the sum of the derivatives of each separate summand. It isn’t necessary at this stage in our physics course to know how to differentiate expressions any more complicated than those above, or sums of them, so that in the spirit of this review, I shouldn’t tell you any more. But there is a formula for differentiating complicated expressions, which is usually not given in calculus class in the form that I’m going to give it to you, and it turns out to be very useful. You won’t learn it later, because nobody will ever tell it to you, but it’s a good thing to know how to do.
Suppose I want to differentiate the following:

Now, the question is how to do it with dispatch. Here’s how you do it with dispatch. (These are just rules; it’s the level to which I’ve reduced the mathematics, because we’re working with the guys who can barely hold on.) Watch!
You write the expression down again, and after each summand you put a bracket:
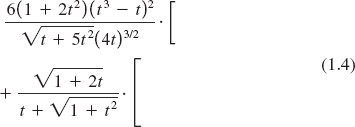
Next, you’re going to write something inside the brackets, such that when you’re all finished, you’ll have the derivative of the original expression. (That’s why you write the expression down again, in case you don’t want to lose it.)
Now, you look at each term and you draw a bar—a divider—and you put the term in the denominator: The first term is 1 + 2t2; that goes in the denominator. The power of the term goes in front (it’s the first power, 1), and the derivative of the term (by our practice game), 4t, goes in the numerator. That’s one term:
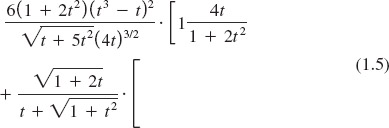
(What about the 6? Forget it! Any number in front doesn’t make any difference: if you wanted to, you could start out, “6 goes in the denominator; its power, 1, goes in front; and its derivative, 0, goes in the numerator.”)
Next term: t3 − t goes in the denominator; the power, +2, goes in front; the derivative, 3t2 − 1, goes in the numerator. The next term, t + 5t2, goes in the denominator; the power, −1/2 (the inverse square root is a negative half power), goes in front; the derivative, 1 + 10t, goes in the numerator. The next term, 4t, goes in the denominator; its power, −3/2, goes in front; its derivative, 4, goes in the numerator. Close the bracket. That’s one summand:

Next summand, first term: the power is +1/2. The object whose power we’re taking is 1 + 2t; the derivative is 2. The power of the next term,  , is −1. (You see, it’s a reciprocal.) The term goes in the denominator, and its derivative (this is the only hard one, relatively) has two pieces, because it’s a sum:
, is −1. (You see, it’s a reciprocal.) The term goes in the denominator, and its derivative (this is the only hard one, relatively) has two pieces, because it’s a sum:  . Close the bracket:
. Close the bracket:
That’s the derivative of the original expression. So, you see, that by memorizing this technique, you can differentiate anything—except sines, cosines, logs, and so on, but you can learn the rules for those easily; they’re very simple. And then you can use this technique even when the terms include tangents and everything else.
I noticed when I wrote it down you were worried that it was such a complicated expression, but I think you can appreciate now that this is a really powerful method of differentiation because it gives the answer—boom—without any delay, no matter how complicated.
The idea here is that the derivative of a function f = k · ua · vb · wc . . . with respect to t is

(where k and a, b, c . . . are constants).
However, in this physics course, I doubt any of the problems will be that complicated, so we probably won’t have any opportunity to use this. Anyway, that’s the way I differentiate, and I’m pretty good at it now, so there we are.
Now, the opposite process is integration. You should equally well learn to integrate as rapidly as possible. Integration is not as easy as differentiation, but you should be able to integrate simple expressions in your head. It isn’t necessary to be able to integrate every expression; for example, (t + 7t2)1/3 is not possible to integrate in an easy fashion, but the others below are. So, when you choose expressions to practice integration, be careful that they can be done easily:
I have nothing more to tell you about calculus. The rest is up to you: you have to practice differentiation and integration—and, of course, the algebra required to reduce horrors like Eq. (1.7). Practicing algebra and calculus in this dull way—that’s the first thing.
The other branch of the mathematics that we’re involved in as a pure mathematical subject is vectors. You first have to know what vectors are, and if you haven’t got a feel for it, I don’t know what to do: we’d have to talk back and forth a while for me to appreciate your difficulty—otherwise I couldn’t explain. A vector is like a push that has a certain direction, or a speed that has a certain direction, or a movement that has a certain direction—and it’s represented on a piece of paper by an arrow in the direction of the thing. For instance, we represent a force on something by an arrow that is pointing in the direction of the force, and the length of the arrow is a measure of the magnitude of the force in some arbitrary scale—a scale, however, which must be maintained for all the forces in the problem. If you make another force twice as strong, you represent that by an arrow twice as long. (See Fig. 1-1.)
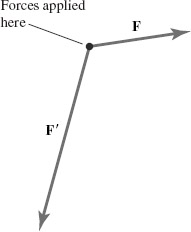
Now, there are operations that can be done with these vectors. That is, if there are two forces acting at the same time on an object—say, two people are pushing on a thing—then the two forces can be represented by two arrows F and F′. When we draw a diagram of something like this, it is often convenient to place the tails of the arrows where the forces are applied, even though in general there’s no meaning to the location of vectors. (See Fig. 1-2.)
FIGURE 1-1Two vectors, represented by arrows.
FIGURE 1-2Representation of two forces applied at the same point.
If we want to know the net resultant force, or total force, that corresponds to adding the vectors, and we can draw this by moving the tail of one onto the head of the other. (They’re still the same vectors after you move them because they have the same direction and the same length.) Then F + F′ is the vector drawn from the tail of F to the head of F′ (or from the tail of F′ to the head of F), as shown in Figure 1-3. This way of adding vectors is sometimes called the “parallelogram method.”
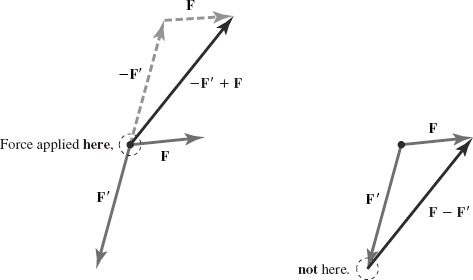
On the other hand, suppose there are two forces acting on an object, but we only know one of them is F′; the other one, which we don’t know, we’ll call X. Then, if the total force on the object is known to be F, we have F′ + X = F. And so, X = F − F′. Thus to find X you have to take the difference of two vectors, and you can do that in either of two ways: you can take −F′, which is a vector in the opposite direction as F′, and add it to F. (See Fig. 1-4.)
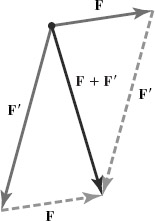
FIGURE 1-3Vector addition by the “parallelogram method.”
Otherwise, F − F′ is simply the vector drawn from the head of F′ to the head of F.
Now, the disadvantage of the second method is that you may have a tendency to draw the arrow as shown in Figure 1-5; although the direction and length of the difference is right, the application of the force is not located at the tail of the arrow—so watch out. In case you’re nervous about it, or there’s any confusion, use the first method. (See Fig. 1-6.)
We can also project vectors in certain directions. For example, if we would like to know what the force is in the ‘x’ direction (called the component of the force in that direction) it’s easy: we just project F down with a right angle onto the x axis, and that gives the component of the force in that direction, which we call Fx. Mathematically, Fx is the magnitude of F (which I’ll write |F|) times the cosine of the angle that F makes with the x axis; this comes from the properties of the right triangle. (See Fig. 1-7.)
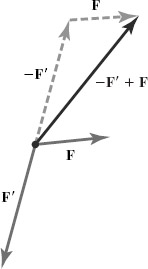
FIGURE 1-4Vector subtraction, first method.

FIGURE 1-5Vector subtraction, second method.
FIGURE 1-6Subtraction of two forces applied at the same point.

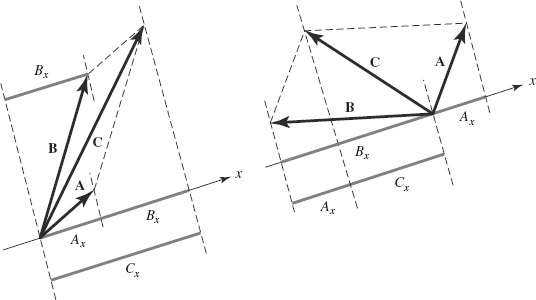
Now, if A and B are added to make C, then the projections that are brought down to form a right angle in a given direction ‘x’, evidently add. So the components of the vector sum are the sum of the vector components, and that’s true of components in any direction. (See Fig. 1-8.)
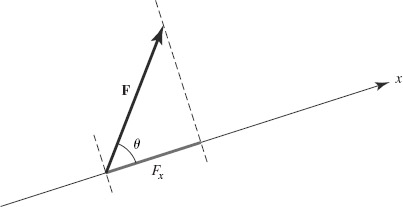
FIGURE 1-7The component of vector F in direction x.
FIGURE 1-8A component of a vector sum equals the sum of the corresponding vector components.

Particularly convenient is the description of vectors in terms of their components on perpendicular axes, x and y (and z—there’s three dimensions in the world; I keep forgetting that, because I’m always drawing on a blackboard!). If we have a vector F that is in the x-y plane, and we know its component in the x direction, that doesn’t completely define F, because there are many vectors in the x-y plane that have the same component in the x direction. But if we also know F’s component in the y direction, then F is completely specified. (See Fig. 1-9.)
The components of F along the x, y, and z axes can be written as Fx, Fy, and Fz; summing vectors is equivalent to summing their components, so if the components of another vector F′ are  , and
, and  , then F + F′ has the components
, then F + F′ has the components  , and
, and 
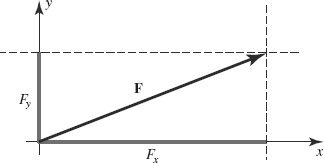
FIGURE 1-9A vector in the x-y plane is completely specified by two components.
That’s the easy part; now it gets a bit more difficult. There’s a way of multiplying two vectors to produce a scalar—a number that is the same in any coordinate system. (In fact, there’s a way of making a scalar out of one vector, and I’ll come back to that.) You see, if the coordinate axes change, then the components change—but the angle between vectors and their magnitudes stay the same. If A and B are vectors, and the angle between them is θ, I can take the magnitude of A, times the magnitude of B times the cosine of θ, and call this number A · B (“A dot B”). (See Fig. 1-10.) That number, called a “dot product” or a “scalar product,” is the same in all coordinate systems:

It is evident that since |A| cos θ is the projection of A onto B, A · B is equal to the projection of A onto B times the magnitude of B. Similarly, since |B| cos θ is the projection of B onto A, A · B also equals the projection of B onto A times the magnitude of A. However, I find for myself that A · B = |A| |B| cos θ is the easiest way to remember what the dot product is; then I can always see the other relations immediately. The trouble is, of course, you have so many ways of saying the same thing that it’s no good to try to remember them all—a point that I’ll make, in a few minutes, more completely.
We can also define A · B in terms of the components of A and B on an arbitrary set of axes. If I were to take three mutually perpendicular axes, x, y, z, in some arbitrary orientation, then A · B will turn out to be

It is not immediately self-evident how you get from |A| |B| cos θ to AxBx + AyBy + AzBz. Although I can prove it when I want to,3 it takes me too long, so I remember them both.
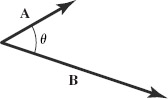
FIGURE 1-10The vector dot product |A| |B| cos θ is the same in all coordinate systems.
When we take the dot product of a vector with itself, θ is 0, and the cosine of 0 is 1, so A · A = |A| |A| cos 0 = |A|2. In terms of components, it’s  . The positive square root of that number is the magnitude of the vector.
. The positive square root of that number is the magnitude of the vector.
Now, we can do what’s called differentiating the vectors. The derivative of a vector with respect to time is meaningless unless the vector depends on the time, of course. That means we have to imagine some vector that is different all the time: as time goes on, the vector keeps changing, and we want the rate of change.
For example, the vector A(t) might be the position, at time t, of an object that’s flying around. At the next moment, t′, the object has moved from A(t) to A(t′); we would like to calculate the rate of change of A at time t.
The rule is the following: that in the interval Δt = t′ − t, the thing has moved from A(t) to A(t′), so the displacement is ΔA = A(t′) − A(t), a difference vector from the old position to the new position. (See Fig. 1-11.)
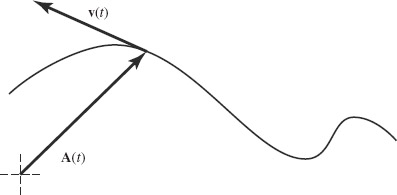
Of course, the shorter the interval Δt, the closer A(t′) is to A(t) .If you divide ΔA by Δt and then take the limit as they both approach zero—that’s the derivative. In this case, where A is position, its derivative is a velocity vector; the velocity vector is in a direction tangent to the curve, because that’s the direction of the displacements; its magnitude you can’t get by looking at this picture, because it depends on how fast the thing is going along the curve. The magnitude of the velocity vector is the speed; it tells you how far the thing moves per unit time. So, that’s a definition of the velocity vector: it’s tangent to the path, and its magnitude is equal to the speed of motion on the path. (See Fig. 1-12.)
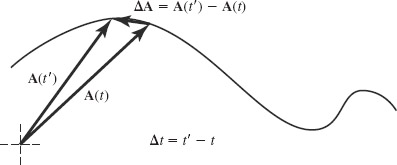
FIGURE 1-11Position vector A and displacement ΔA during interval Δt.
FIGURE 1-12Position vector A and its derivative v at time t.

Incidentally, it is dangerous to draw both the position vector and the velocity vector in the same diagram, unless you’re being very careful—and since we’re having a little trouble understanding these things, I point out all the possible pitfalls that I can think of, because the next thing you might want to do is add A to v for some purpose. That’s not legitimate, because in order to really draw the velocity vector, you have to know the scale of time: the velocity vector is in a different scale than the position vector; in fact, they have different units. You can’t add positions and velocities together in general—and you can’t add them here.
In order for me to actually draw the picture of any vector, I have to make a decision as to the scale. When we talked about forces, we said that so-and-so many newtons were going to be represented by 1 inch (or 1 meter, or whatever). And here, we have to say that so-and-so many meters per second is going to be represented by 1 inch. Someone else could draw the picture with position vectors the same lengths as ours, but with the velocity vector one-third as long as ours—he’s just using a different scale for his velocity vector. There’s no unique way to draw the length of a vector because the choice of scale is arbitrary.
Now, the velocity in terms of x, y, and z components is very easy, because, for example, the rate of change of the x component of position is equal to the x component of velocity, and so on. This is simply because the derivative is really a difference, and since the components of a difference vector equal the differences of the corresponding components, we have

and then taking limits we have the components of the derivative:

This is true for any direction: if I take the component of A(t) in any direction, then the velocity vector component in that direction is the derivative of the component of A(t) in that direction, with one serious warning: the direction must not change with time. You can’t say, “I’m gonna take the component of A in the direction of v,” or something like that, because v is moving. It’s only true that the derivative of the position component is equal to the velocity component if the direction in which you take the component is itself fixed. So equations (1.15) and (1.16) are only true for x, y, z, and other fixed axes; if the axes are turning while you’re trying to take the derivative, the formula is much more complicated.
Those are some of the deviations and difficulties of differentiating vectors.
Of course, you can differentiate the derivative of a vector, then differentiate that, and so on. I called the derivative of A “velocity,” but that’s only because A is the position; if A is something else, its derivative is something other than velocity. For example, if A is the momentum, the time derivative of momentum equals the force, so the derivative of A would be the force. And if A were the velocity, the time derivative of the velocity is the acceleration, and so on. What I’ve been telling you is generally true of differentiating vectors, but here I’ve given only the example of positions and velocities.
Finally, there’s only one more thing that I have to talk about for vectors, and that is a horrible, complicated thing, called a “line integral”:

We’ll take as an example that you have a certain vector field F, which you want to integrate along a curve S from point a to point z. Now, in order for this line integral to mean something, there must be some way of defining the value of F at every point on S between a and z. If F is defined as the force applied to an object at point a, but you can’t tell me how the force changes as you move along S, at least between a and z, then “the integral of F along S from a to z” makes no sense. (I said “at least,” because F could be defined anywhere else too, but at least you must define it on the part of the curve that you are integrating along.)
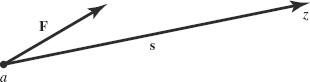
FIGURE 1-13A constant force F defined on the straight-line path a-z.
In a moment I’ll define the line integral of an arbitrary vector field along an arbitrary curve, but first let’s consider the case where F is constant, and S is a straight-line path from a to z—a displacement vector, which I’ll call s. (See Fig. 1-13.) Then, since F is constant, we can take it outside the integral (just like ordinary integration), and the integral of ds from a to z is just s, so the answer is F · s. That’s the line integral for a constant force and a straight-line path—the easy case:

(Remember that F · s is the component of the force in the direction of the displacement times the magnitude of the displacement; in other words, it’s simply the distance along the line times the component of force in that direction. There are a lot of other ways to look at it, too: it’s the component of the displacement in the direction of the force, times the magnitude of the force; it’s the magnitude of the force times the magnitude of the displacement, times the cosine of the angle between them. These are all equivalent.)
More generally, the line integral is defined as follows. First, we break up the integral by dividing S between a and z into N equal segments: ΔS1, ΔS2 . . . ΔSN. Then the integral along S is the integral along ΔS1 plus the integral along ΔS2 plus the integral along ΔS3, and so on. We choose N large so that we can approximate each ΔSi by a little displacement vector, Δsi, over which F has an approximately constant value, Fi. (See Fig. 1-14.) Then, by the “constant force straight-line path” rule, segment ΔSi contributes approximately Fi · Δsi to the integral. So, if you add together Fi · Δsi for i equals 1 to N, that’s an excellent approximation to the integral. The integral is exactly equal to this sum only if we take the limit as N goes to infinity: you take the segments as fine as you can; you take them a little finer than that, and you get the correct integral:
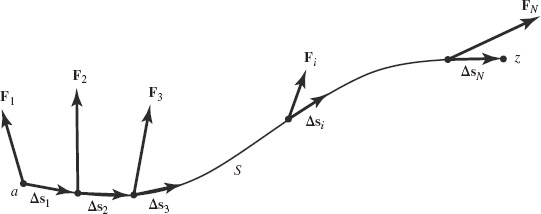
FIGURE 1-14A variable force F defined on the curve S.

(This integral, of course, depends upon the curve—generally—though sometimes it doesn’t in the physics.)
Well, then, that’s all there is to the mathematics that you have to know to do the physics—for now, at least—and these things, most particularly the calculus and the early parts of the vector theory, should become second nature. Some things—like the line integral—may not be second nature now, but they will be, eventually, as you use them more; they aren’t so vital yet, and that’s harder. The things you “gotta get into your head good,” right now, are the calculus, and the little things about taking the components of vectors in various directions.
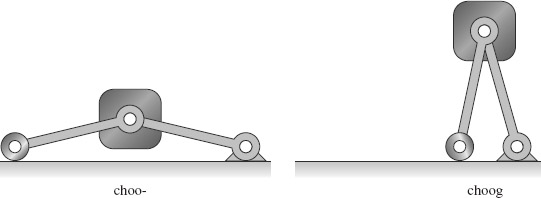
I’ll give one example—just a very simple one—to show how to take components of vectors. Suppose we have a machine of some kind, as illustrated in Figure 1-15: it’s got two rods connected by a pivot (like an elbow joint) with a big weight on it. The end of one rod is connected to the floor by a stationary pivot, and the end of the other rod has a rolling pivot that rolls along the floor in a slot—it’s part of a machine, see, and it’s going choo-choog, choo-choog—the roller’s going back and forth, the weight’s going up and down, and so on.
FIGURE 1-15A simple machine.
Let’s say the weight is 2 kg, the rods are 0.5 meters long, and at a certain moment when the machine is standing still, the distance from the weight to the floor just happens to come out, luckily, to 0.4 meters—so that we have a 3-4-5 triangle, to make the arithmetic easier. (See Fig. 1-16.) (The arithmetic shouldn’t make any difference; the real difficulty is to get the ideas right.)
The problem is to figure out what horizontal push P you have to make on the roller in order to hold that weight up. Now, I’m going to make an assumption that we will need in order to do the problem. We make the assumption that when a rod has pivots at both ends, then the net force is always directed along the rod. (It turns out to be true; you may feel it’s self-evident.) It would not necessarily be true if there were a pivot only at one end of the rod, because then I could push the rod sideways. But if there’s a pivot at both ends, I can only push along the rod. So let’s suppose that we know that—that the forces must lie in the directions of the rods.
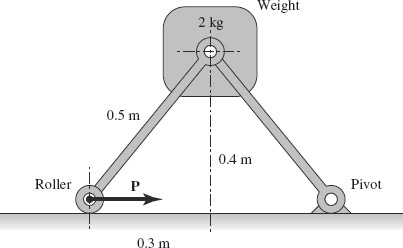
FIGURE 1-16What force, P, is required to hold up the weight?
We also know something else from the physics: that the forces are equal and opposite at the ends of the rods. For example, whatever force is exerted by the rod on the roller must also be exerted by that rod, in the opposite direction, on the weight. So, that’s the problem: with these ideas about the properties of rods, we try to figure out what’s the horizontal force on the roller.
I think the way I’d like to try to do it is this: the horizontal force exerted on the roller by the rod is a certain component of the net force on it. (Of course, there’s also a vertical component due to the “confining slot,” which is unknown and uninteresting; it’s part of the net force on the roller, which is exactly opposite the net force on the weight.) Therefore I can get the components of the force exerted on the roller by the rod—in particular, the horizontal component I want—if I can get the components of the force exerted by the rod on the weight. If I call the horizontal force on the weight Fx, then the horizontal force on the roller is −Fx, and the force needed to hold the weight up is equal and opposite to that, so |P| = Fx.
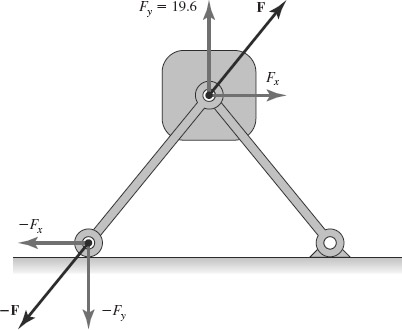
The vertical force on the weight from the rod, Fy, is very easy: it’s simply equal to the weight of the thing, which is 2 kg, times g, the gravitational constant. (Something else you have to know from physics—g is 9.8, in the mks system.) Fy is 2 times g, or 19.6 newtons, so the vertical force on the roller is −19.6 newtons. Now, how can I get the horizontal force? Answer: I get it by knowing that the net force must lie along the rod. If Fy is 19.6, and the net force lies along the rod, then how much must Fx be? (See Fig. 1-17.)
Well, we have the projections of the triangles, which have been designed very nicely, so that the ratio of the horizontal to the vertical sides is 3 to 4; that’s the same ratio as Fx is to Fy, (I don’t care about the net force, F, here; I only need the force in the horizontal direction) and I already know what the vertical force is. So, the magnitude of the horizontal force—unknown—is to 19.6 as 0.3 is to 0.4. Therefore I multiply 3/4 by 19.6 and I get:

We conclude that |P| the horizontal force on the roller needed to hold the weight up, is 14.7 newtons. That’s the answer to this problem.
FIGURE 1-17The force on the weight and the force on the roller from one rod.
Or is it?
You see, you can’t do physics just by plugging in the formulas: you’ll never get anywhere without having something else besides knowing the rules, the formulas for projections, and all that stuff; you have to have a certain feeling for the real situation! I’ll make some more remarks about that in a minute, but here, in this particular problem, the difficulty is the following: the net force on the weight is not only from one rod, there’s also a force exerted on it by the other rod, in some direction, and I left that out when I made the analysis—so it’s all wrong!
I also have to worry about the force that the rod with the stationary pivot exerts on the weight. Now it’s getting complicated: how can I figure out what that force is? Well, what is the net force of everything on the weight? Just the gravity—it just balances the gravity; there is no force horizontally on the weight. So the clue by which I can find out how much “juice” there is along the rod with the stationary pivot, is to notice that it must exert just enough horizontally to balance the horizontal force that the other rod is exerting.
Therefore, if I were to draw the force that the rod with the stationary pivot exerts, its horizontal component would be exactly opposite the horizontal component that the rod with the roller exerts, and the vertical components would be equal because of the identical 3-4-5 triangles the rods make: both rods are pushing up the same amount because their horizontal components must balance—if the rods were different lengths, you’d have a little more work to do, but it’s the same idea.
So, let’s start out with the weight again: the forces from the rods on the weight are the first things to get straightened out. So, let’s look at the forces from the rods on the weight. The reason I keep repeating this to myself is because otherwise I get the signs all mixed up: The force from the weight on the rods is the opposite of the force from the rods on the weight. I always have to start over after I get all balled up like this; I have to think it out again, and make up my mind as to what I want to talk about. So I say, “Look at the forces from the rods on the weight: there’s a force F, which is in the direction of one rod. Then there’s a force F′, in the direction of the other rod. Those are the only two forces, and they are in the directions of the rods.”
Now, the net of these two forces—ahhhh! I’m beginning to see the light! The net of these two forces has no horizontal component, and a vertical component of 19.6 newtons. Ah! Let me draw the picture again, since I did it wrong before. (See Fig. 1-18.)
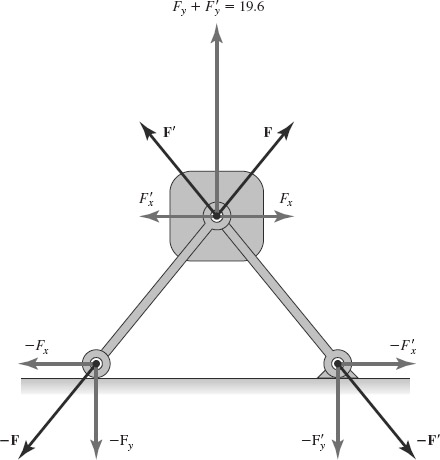
FIGURE 1-18The force on the weight and the forces on the roller and pivot, from both rods.
The horizontal forces balance, therefore the vertical components add, and the 19.6 newtons is not just the vertical component of the force from one rod, but the total from both; since each rod contributes half, the vertical component from the rod with the roller is only 9.8 newtons.
Now when we take the horizontal projection of this force, multiplying it by 3/4 as we did before, we get the horizontal component of force from the rod with the roller on the weight, and that takes care of that:
I have a few moments left, so I’d like to make a little speech about the relation of the mathematics to the physics—which, in fact, was well illustrated by this little example. It will not do to memorize the formulas, and to say to yourself, “I know all the formulas; all I gotta do is figure out how to put ’em in the problem!”
Now, you may succeed with this for a while, and the more you work on memorizing the formulas, the longer you’ll go on with this method—but it doesn’t work in the end.
You might say, “I’m not gonna believe him, because I’ve always been successful: that’s the way I’ve always done it; I’m always gonna do it that way.”
You are not always going to do it that way: you’re going to flunk—not this year, not next year, but eventually, when you get your job, or something—you’re going to lose along the line somewhere, because physics is an enormously extended thing: there are millions of formulas! It’s impossible to remember all the formulas—it’s impossible!
And the great thing that you’re ignoring, the powerful machine that you’re not using, is this: suppose Figure 1-19 is a map of all the physics formulas, all the relations in physics. (It should have more than two dimensions, but let’s suppose it’s like that.)
Now, suppose that something happened to your mind, that somehow all the material in some region was erased, and there was a little spot of missing goo in there. The relations of nature are so nice that it is possible, by logic, to “triangulate” from what is known to what’s in the hole. (See Fig. 1-20.)
FIGURE 1-19Imaginary map of all the physics formulas.
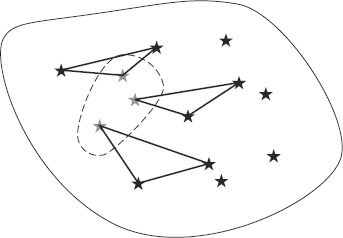
FIGURE 1-20Forgotten facts can be recreated by triangulating from known facts.
And you can re-create the things that you’ve forgotten perpetually—if you don’t forget too much, and if you know enough. In other words, there comes a time—which you haven’t quite got to, yet—where you’ll know so many things that as you forget them, you can reconstruct them from the pieces that you can still remember. It is therefore of first-rate importance that you know how to “triangulate”—that is, to know how to figure something out from what you already know. It is absolutely necessary. You might say, “Ah, I don’t care; I’m a good memorizer! I know how to really memorize! In fact, I took a course in memory!”
That still doesn’t work! Because the real utility of physicists—both to discover new laws of nature, and to develop new things in industry, and so on—is not to talk about what’s already known, but to do something new—and so they triangulate out from the known things: they make a “triangulation” that no one has ever made before. (See Fig. 1-21.)
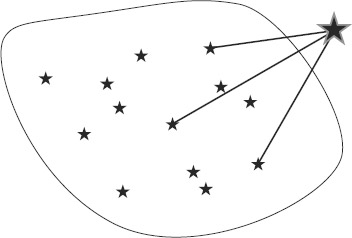
FIGURE 1-21New discoveries are made by physicists triangulating from the known to the previously unknown.
In order to learn how to do that, you’ve got to forget the memorizing of formulas, and to try to learn to understand the interrelationships of nature. That’s very much more difficult at the beginning, but it’s the only successful way.
1No one went out.
2Only men were admitted to Caltech in 1961.
3See The Feynman Lectures on Physics (FLP) Vol. I, Section 11-7.