4.1 Introduction
- 1.
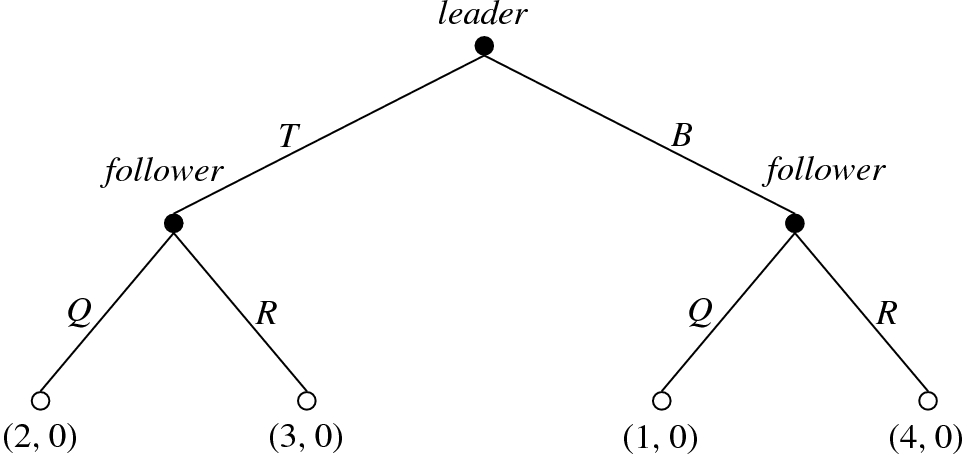
in the first stage: one player, henceforth called the leader, chooses an action x in his action set X;
- 2.
in the second stage: one player, henceforth called the follower, observes the action x chosen by the leader in the first stage and then chooses an action y in his action set Y ;
- 3.
after the two-stage interaction: the leader receives L(x, y) where
 is the leader’s payoff function, and the follower receives F(x, y) where
is the leader’s payoff function, and the follower receives F(x, y) where  is the follower’s payoff function.
is the follower’s payoff function.
Assume that players aim to minimize their payoff functions, as traditionally used in optimization literature where the payoff functions embed players’ costs. However, since  , we could assume equivalently that players maximize their payoff functions (which usually appears in economics contexts, where payoff functions represent players’ profits). At the moment, we set no assumptions on the structure of the actions sets X and Y : they could be of finite or infinite cardinalities, subsets of finite or infinite dimensional spaces, strict subsets or whole spaces, etc. Their nature will be specified each time in the sequel of the chapter.
, we could assume equivalently that players maximize their payoff functions (which usually appears in economics contexts, where payoff functions represent players’ profits). At the moment, we set no assumptions on the structure of the actions sets X and Y : they could be of finite or infinite cardinalities, subsets of finite or infinite dimensional spaces, strict subsets or whole spaces, etc. Their nature will be specified each time in the sequel of the chapter.


 that assigns to any action x of the leader the set M(x) defined above is the follower’s best reply correspondence. For sake of brevity, it will be also called argmin map.
that assigns to any action x of the leader the set M(x) defined above is the follower’s best reply correspondence. For sake of brevity, it will be also called argmin map.The leader, if he can foresee the optimal response  chosen for any action x by the follower, will pick an action in the set
chosen for any action x by the follower, will pick an action in the set  according to such a forecast.
according to such a forecast.
Given the informative structure of the game, predicting the follower’s optimal responses (or, equivalently, the response function y(⋅) of the follower) is typically a hard task for the leader, unless some additional information is available. Therefore, depending on the additional information of the leader about the single-valuedness of M or, when M is not single-valued, about how the follower chooses an optimal response in the set M(x) for any x ∈ X, one can associate to the Stackelberg game Γ different kinds of mathematical problems.
In Sect. 4.2 such mathematical problems and the related solution concepts are presented, together with illustrative examples and their possible roles in bilevel optimization.
In Sect. 4.3 we describe and discuss the main crucial issues arising in the just mentioned problems, focusing on the following ones: existence of solutions, “variational” stability, well-posedness, approximation, numerical approximation and selection of solutions. The crucial issues negatively answered are illustrated by counterexamples.
Regularizing the follower’s optimal reaction sets;
Regularizing the follower’s payoff function.
In Sect. 4.5 we investigate the second approach, that enables both to overcome the non-uniqueness of the follower’s optimal response and to select among the solutions. To get these goals, we construct sequences of Stackelberg games with a unique second-stage solution which approximate in some sense the original game by exploiting first the Tikhonov regularization and then the proximal regularization, two well-known regularization techniques in convex optimization.
A conclusive section concerns various extensions of the Stackelberg game notion considered in this chapter.
4.2 Models and Solution Concepts
We will illustrate five problems and solution concepts connected to the Stackelberg game defined in the previous section. The first one appears if the follower’s best reply correspondence M is assumed to be single-valued (and the leader knows it), whereas the others concern situations where M is not single-valued. Their connections will be emphasized and illustrated by examples. In this section, we only refer to seminal papers and to the first ones on regularization and approximation methods.
4.2.1 Stackelberg Problems

Let us recall the solution concepts associated to (SP).
The infimum value infx ∈ XL(x, m(x)) is the Stackelberg value of (SP).
- A leader’s action
 is a Stackelberg solution to (SP) if
is a Stackelberg solution to (SP) if 
An action profile
 is a Stackelberg equilibrium of (SP) if
is a Stackelberg equilibrium of (SP) if  is a Stackelberg solution and
is a Stackelberg solution and  . △
. △

 with a, b ∈ ]0, +∞[ and linear cost functions C
i(q
i) = cq
i for any i ∈{1, 2} with c ∈ ]0, a[. Hence, the optimal response of firm 2 to any quantity chosen by firm 1 is unique and given by
with a, b ∈ ]0, +∞[ and linear cost functions C
i(q
i) = cq
i for any i ∈{1, 2} with c ∈ ]0, a[. Hence, the optimal response of firm 2 to any quantity chosen by firm 1 is unique and given by 
 , the quantities produced at equilibrium are
, the quantities produced at equilibrium are 

 . In such a problem the leader’s constraints depend also on the follower’s best reply function m, which makes it harder to manage than (SP) from the mathematical point of view. In the sequel of the chapter we will consider only constraints for the leader which do not depend on the actions of the follower.
. In such a problem the leader’s constraints depend also on the follower’s best reply function m, which makes it harder to manage than (SP) from the mathematical point of view. In the sequel of the chapter we will consider only constraints for the leader which do not depend on the actions of the follower.From now on, in the next subsections of this section we assume that M is not single-valued.
4.2.2 Pessimistic Leader: Weak Stackelberg Problem

The infimum value w =infx ∈ Xsupy ∈ M(x)L(x, y) is the security (or pessimistic) value of (PB).
- A leader’s action
 is a weak Stackelberg (or pessimistic) solution to (PB) if that is,
is a weak Stackelberg (or pessimistic) solution to (PB) if that is,
 .
. An action profile
 is a weak Stackelberg (or pessimistic) equilibrium of (PB) if
is a weak Stackelberg (or pessimistic) equilibrium of (PB) if  is a weak Stackelberg solution and
is a weak Stackelberg solution and  . △
. △
For first investigations about regularization and approximation of problem (PB) see [51, 69, 71, 89].
4.2.3 Optimistic Leader: Strong Stackelberg Problem

The infimum value s =infx ∈ Xinfy ∈ M(x)L(x, y) is the optimistic value of (OB).
- A leader’s action
 is a strong Stackelberg (or optimistic) solution to (OB) if that is,
is a strong Stackelberg (or optimistic) solution to (OB) if that is,
 .
. An action profile
 is a strong Stackelberg (or optimistic) equilibrium of (OB) if
is a strong Stackelberg (or optimistic) equilibrium of (OB) if  is a strong Stackelberg solution and
is a strong Stackelberg solution and  . △
. △
The use of terms “weak Stackelberg” and “strong Stackelberg” goes back to [20] where a concept of sequential Stackelberg equilibrium in a general dynamic games framework is introduced. For a first investigation on regularization and approximation of problem (OB) see [52].
 is a strong Stackelberg equilibrium of (OB) if and only if it is a (global) solution of the following problem:
is a strong Stackelberg equilibrium of (OB) if and only if it is a (global) solution of the following problem: 
 ,
,  and
and  . Moreover, the value s
′ =infx ∈ X,y ∈ M(x)L(x, y) coincides with s, the optimistic value of (OB), and the problem is frequently called “bilevel optimization problem” (for first results, see for example [14, 26, 85, 96, 108, 111]).
. Moreover, the value s
′ =infx ∈ X,y ∈ M(x)L(x, y) coincides with s, the optimistic value of (OB), and the problem is frequently called “bilevel optimization problem” (for first results, see for example [14, 26, 85, 96, 108, 111]).The following examples show that the pessimistic and the optimistic behaviours of the leader can design different solutions, values and equilibria.


![$$\displaystyle \begin{aligned} L(x,y)=-x-y\quad \text{and}\quad F(x,y)=\begin{cases} (x+7/4)y, & \mbox{if } x\in[-2,-7/4[ \\ 0, & \mbox{if } x\in [-7/4,7/4[ \\ (x-7/4)y, & \mbox{if } x\in[7/4,2]. \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equq.png)
![$$\displaystyle \begin{aligned} M(x)=\begin{cases} \{1\}, & \mbox{if } x\in [-2,-7/4[ \\ {} [-1,1], & \mbox{if } x\in [-7/4,7/4] \\ \{-1\}, & \mbox{if } x\in ]7/4,2]. \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equr.png)
![$$\displaystyle \begin{aligned} \sup_{y\in M(x)}L(x,y)=\begin{cases} -x-1, & \mbox{if } x\in[-2,-7/4[ \\ -x+1, & \mbox{if } x\in[-7/4,2], \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equs.png)
![$$\displaystyle \begin{aligned} \inf_{y\in M(x)}L(x,y)=\begin{cases} -x-1, & \mbox{if } x\in[-2,7/4] \\ -x+1, & \mbox{if } x\in]7/4,2], \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equt.png)
4.2.4 Intermediate Stackelberg Problem


Let us recall the solution concepts related to (IS D).
The infimum value
 is the intermediate value of (IS
D).
is the intermediate value of (IS
D).- A leader’s action
 is an intermediate Stackelberg solution with respect to D if
is an intermediate Stackelberg solution with respect to D if 
An action profile
 is an intermediate Stackelberg equilibrium with respect to D if
is an intermediate Stackelberg equilibrium with respect to D if  is an intermediate Stackelberg solution with respect to D and
is an intermediate Stackelberg solution with respect to D and  . △
. △
Depending on the probability distribution D(x) on M(x) for any x ∈ X, problem (IS D) could become (PB) or (OB). Examples on the connections among weak, strong and intermediate Stackelberg solutions are illustrated in [83], one of which is presented below for the sake of completeness.
![$$\displaystyle \begin{aligned} \operatorname*{\mbox{Arg min}}_{x\in X}\left(\alpha L(x,x^2)+(1-\alpha)L(x,-x^2)\right)=\begin{cases} \{-1\}, & \mbox{if } \alpha\in[0,{3}/{4}] \\ \{-{1}/{2(2\alpha-1)}\}, & \mbox{if }\alpha\in]{3}/{4},1]. \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equx.png)
![$$\displaystyle \begin{aligned} v_D=\inf_{x\in X}\left(\alpha L(x,x^2)+(1-\alpha)L(x,-x^2)\right)=\begin{cases} 2\alpha-2, & \mbox{if } \alpha\in[0,{3}/{4}] \\ -{1}/{4(2\alpha-1)}, & \mbox{if }\alpha\in]{3}/{4},1], \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equy.png)

4.2.5 Subgame Perfect Nash Equilibrium Problem
The equilibrium concepts presented until now consist of action profiles, that is pairs composed by one action of the leader and one action of the follower and, moreover, they are focused primarily on the leader’s perspectives. Such concepts are broadly used in an engineering setting or by optimization practitioners, see for example [10, 28, 41, 81]. However, as traditional in a game-theoretical framework, we are now interested in an equilibrium concept which takes more into account the strategic aspects of the game. The equilibrium concept naturally fitting such goal is the subgame perfect Nash equilibrium (henceforth SPNE), which represents the most widely employed solution concept in an economic setting. The SPNE solution concept was introduced by the Nobel laureate Selten in [101] who suggested that players should act according to the so-called principle of sequential rationality: “the equilibria to select are those whereby the players behave optimally from any point of the game onwards”. For the notions of strategy, subgame and SPNE in a general game-theoretical framework and for further discussion on the behavioural implications and procedures to find SPNEs see, for example, [39, Chapter 3] and [87, Chapter 7].
We first recall the notion of player’s strategy only for a two-player Stackelberg game Γ = (X, Y, L, F). In such a game, the set of leader’s strategies coincides with the set of leader’s actions X, whereas the set of follower’s strategies is the set of all the functions from X to Y , i.e. Y X = {φ: X → Y }.
The set of strategy profiles is X × Y X and the definition of subgame perfect Nash equilibrium is characterized in the following way.
 is an SPNE of Γ if the following conditions are satisfied:
is an SPNE of Γ if the following conditions are satisfied: - (SG1)
- for each choice x of the leader, the follower minimizes his payoff function,

- (SG2)
- the leader minimizes his payoff function taking into account his hierarchical advantage, i.e.

Note that the denomination “subgame perfect Nash equilibrium” is due to the following key features: first the SPNE notion is a refinement of the Nash equilibrium solution concept (introduced by the Nobel laureate Nash in [95]), secondly the restriction of an SPNE to any subgame constitutes a Nash equilibrium.
We emphasize that an SPNE consists of a strategy profile, that is a pair composed by one strategy of the leader (or equivalently one action of the leader) and one strategy of the follower (which is a function from the actions set of the leader to the actions set of the follower), as illustrated in Definition 4.2.5 and differently from all the equilibrium concepts defined before where only action profiles are involved. However, we can connect SPNEs and the equilibrium notions described above in this section, as pointed out in the following examples.
The set of SPNEs of a Stackelberg game Γ = (X, Y, L, F) where the follower’s optimal response to any choice of the leader is unique can be fully characterized in terms of the solutions to the associate problem (SP) defined in Sect. 4.2.1.


 where
where  and
and  are given by
are given by 
 is the unique Stackelberg solution and, moreover,
is the unique Stackelberg solution and, moreover,  is the unique Stackelberg equilibrium.
is the unique Stackelberg equilibrium.In the case where the follower’s best reply correspondence is not single-valued, the solutions to the associate problem (PB) as well as to the associate problem (OB) defined in Sects. 4.2.2 and 4.2.3, respectively, can be part of an SPNE.
 and
and  where
where  and
and  are the functions defined by
are the functions defined by 
 and
and  where
where  and
and  are the functions defined by
are the functions defined by 
 and
and  , since
, since 
Therefore, having also in mind to deal with the issue of how reducing the number of SPNEs, we will take into account these latter types of SPNEs “induced” by weak or strong Stackelberg solutions.
- A strategy profile
 is an SPNE of Γ induced by a weak Stackelberg solution if
is an SPNE of Γ induced by a weak Stackelberg solution if  is an SPNE of Γ which satisfies
is an SPNE of Γ which satisfies 
- A strategy profile
 is an SPNE of Γ induced by a strong Stackelberg solution if
is an SPNE of Γ induced by a strong Stackelberg solution if  is an SPNE of Γ which satisfies
is an SPNE of Γ which satisfies 
△
Coming back to the second example on page 13,  is an SPNE induced by a weak Stackelberg solution,
is an SPNE induced by a weak Stackelberg solution,  is an SPNE induced by a strong Stackelberg solution,
is an SPNE induced by a strong Stackelberg solution,  and
and  are SPNEs that are not induced either by a weak or by a strong Stackelberg solution and the game has no further SPNEs.
are SPNEs that are not induced either by a weak or by a strong Stackelberg solution and the game has no further SPNEs.
Let us provide below an example where the SPNEs induced by weak or strong Stackelberg solutions are derived in a continuous setting, differently from the above example.
 and
and  where
where ![$$\bar \varphi \colon [-2,2]\to [-1,1]$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_IEq59.png) and
and ![$$\bar \psi \colon [-2,2]\to [-1,1]$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_IEq60.png) are defined respectively by
are defined respectively by ![$$\displaystyle \begin{aligned} \bar\varphi(x)=\begin{cases} 1, & \mbox{if } x\in [-2,-7/4[ \\ -1, & \mbox{if } x\in [-7/4,2] \end{cases}\quad \text{and}\quad \bar\psi(x)=\begin{cases} 1, & \mbox{if } x\in [-2,7/4] \\ -1, & \mbox{if } x\in ]7/4,2], \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equak.png)
 where
where ![$$\bar \vartheta \colon [-2,2]\to [-1,1]$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_IEq62.png) is defined by
is defined by ![$$\displaystyle \begin{aligned} \bar\vartheta(x)=\begin{cases} 1, & \mbox{if } x\in[-2,-7/4[ \\ -4x/7, & \mbox{if } x\in[-7/4,7/4[ \\ -1, & \mbox{if } x\in [7/4,2]. \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equal.png)
4.3 Crucial Issues in Stackelberg Games
Existence: do the solutions of the problem exist under not too restrictive assumptions on the actions sets and on the payoff functions (possibly discontinuous, as not unusual in economic frameworks)?
“Variational” stability: the data of the problem could be affected by uncertainty, hence given a perturbation of the original problem acting on the actions sets and/or on the payoff functions, does a sequence of solutions of the perturbed problems converge to a solution of the original problem? And what about the values? Such analysis, which helps to predict the “behaviour” of the game when one is not able to deal with exact equilibria, and similar analyses that compare outcomes before and after a change in exogenous parameters are known in economics as comparative statics.
Well-posedness: does the problem have a unique solution? And does any method which constructs an “approximating sequence” automatically allow to approach a solution?
Approximation: how constructing appropriate concepts of approximate solutions in order to both obviate the lack of solutions of a problem and to manage problems where infinite dimensional spaces are involved?
Approximation via numerical methods: how transforming the original problem into a better-behaved equivalent problem? And how overcoming the numerical difficulties which derive from the possible non-single-valuedness of the follower’s best reply correspondence?
Selection: if the problem has more than one solution, is it possible to construct a procedure which allows to reduce the number of solutions or, better yet, to pick just one solution? Which are the motivations that would induce the players to act according to such a procedure in order to reach the designed solution?
Now, we discuss which of the issues displayed above can be positively or negatively answered.
4.3.1 Stackelberg Problems
Problem (SP) is well-behaved regarding all the topics just summarized. In particular, by applying the maximum theorem in [6, 16], the existence of Stackelberg solutions and Stackelberg equilibria is guaranteed provided that the action sets X and Y are compact subsets of two Euclidean spaces and that the payoff functions L and F are continuous over X × Y .
L is lower semicontinuous over X × Y ,
F is lower semicontinuous over X × Y ,
- for any (x, y) ∈ X × Y and any sequence (x n)n converging to x in X, there exists a sequence
 in Y such that
in Y such that 



- for any sequence
 such that
such that
 and
and
 converges to
converges to
 in X for a selection of integers (n
k)k, we have
in X for a selection of integers (n
k)k, we have

 .
.
 is a Stackelberg equilibrium of (SP)
nfor any
is a Stackelberg equilibrium of (SP)
nfor any
 , then any convergent subsequence of the sequence
, then any convergent subsequence of the sequence
 in X × Y has a limit
in X × Y has a limit
 which is a Stackelberg equilibrium of (SP) and satisfies
which is a Stackelberg equilibrium of (SP) and satisfies

△
- the continuous convergence of (L n)n to L can be substituted by the following two conditions:
- (a)for any (x, y) ∈ X × Y and any sequence (x n, y n)n converging to (x, y) in X × Y , we have

- (b)for any x ∈ X there exists a sequence
 converging to x in X such that, for any y ∈ Y and any sequence (y
n)n converging to y in Y , we have
converging to x in X such that, for any y ∈ Y and any sequence (y
n)n converging to y in Y , we have 
- (a)
- whereas, the continuous convergence of (F n)n to F can be substituted by the following two conditions:
- (c)for any (x, y) ∈ X × Y and any sequence (x n, y n)n converging to (x, y) in X × Y , we have

- (d)for any (x, y) ∈ X × Y and any sequence (x n)n converging to x in X, there exists a sequence
 in Y such that
in Y such that 
- (c)
△
Results on well-posedness of (SP) can be found in [68, 91], whereas in [28, Chapter 6] numerical approximation and algorithmic issues are widely investigated.
Concerning problem (GSP) defined in Sect. 4.2.1, we mention that in [103] a first approximation technique based on a barrier method has been proposed, then in [67] a general approximation scheme involving conditions of minimal character has been introduced together with applications to barrier methods, whereas in [72] also external penalty methods have been considered.
4.3.2 Weak Stackelberg (or Pessimistic Bilevel Optimization) Problem
Problem (PB) is the worst-behaved among the problems illustrated in Sect. 4.2. In fact, the compactness of the action sets and the continuity of the payoff functions do not guarantee, in general, the existence of weak Stackelberg solutions and weak Stackelberg equilibria even in a finite dimensional setting, as proved in many folk examples in literature (see [15, 80] and [10, Remark 4.3]) and in the following one.
![$$\displaystyle \begin{aligned} M(x)=\begin{cases} \{-1\}, & \mbox{if } x\in[-1,0[ \\ {} [-1,1], & \mbox{if } x=0 \\ \{1\}, & \mbox{if } x\in ]0,1]. \end{cases} \end{aligned} $$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equ1.png)
![$$\displaystyle \begin{aligned} \sup_{y\in M(x)}L(x,y)=\begin{cases} -x-1, & \mbox{if } x\in[-1,0[ \\ -x+1, & \mbox{if } x\in [0,1], \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equaw.png)
 . Hence such a (PB) has no solution and no weak Stackelberg equilibrium.
. Hence such a (PB) has no solution and no weak Stackelberg equilibrium.Nevertheless, existence results for very special classes of problem (PB) can be found in [2, 3, 80].
In a more general framework, to overcome the lack of solutions, for any 𝜖 > 0 the concept of 𝜖-approximate solution of (PB) has been investigated in a sequential setting by Loridan and Morgan in [71], where the existence of such solutions is analyzed under mild convexity assumptions on the follower’s payoff function, and in [74] where quasi-convexity assumptions are considered.
Then, in [76] the notion of strict 𝜖-approximate solution has been introduced and related existence results have been provided without requiring convexity assumptions. A crucial property of these two concepts is the convergence of the approximate pessimistic values towards the pessimistic value of (PB) as 𝜖 tends to zero. We point out that all the results in the papers just mentioned have been obtained in the case of non-parametric constraints.
Afterwards, Lignola and Morgan in [51] extensively investigated all the possible kinds of constraints (including those defined by parametric inequalities) in a topological setting. More recently, new notions of approximate solutions have been introduced in [63, 64] in an easier-to-manage sequential setting which allow to construct a surrogate for the solution of (PB) called viscosity solution. Such concepts will be presented in Sect. 4.4 together with their properties.

Consider X = Y = [−1, 1], L(x, y) = x + y, F(x, y) = 0 and let L
n(x, y) = x + y + 1∕n and F
n(x, y) = y∕n for any  .
.
Although the sequence of functions (L n)n continuously converges to L and the sequence (F n)n continuously converges to F, the sequence of pessimistic values of (PB)n does not converge to the pessimistic value of (PB).


However, convergence results of the exact solutions to (PB)n towards a solution to (PB) have been obtained in [69] for a special class of problems.
In a more general framework, in order to obviate the lack of stability, a first attempt to manage the stability issue (intended in the Hausdorff’s sense) of (PB) can be found in [89] by means of approximate solutions. Afterwards, “variational” stability (in the sense of the above example) for such approximate solutions has been investigated under conditions of minimal character and assuming non-parametric constraints in [71] (under mild convexity assumptions on the follower’s payoff function) and in [74] (under quasi-convexity assumptions). For applications to interior penalty methods see [70, Section 5] and to exterior penalty methods see [74, Section 5].
Then, a comprehensive analysis on all the types of follower’s constraints has been provided in [51] for a general topological framework. Such results will be presented in Sect. 4.4.
Furthermore, (PB) is hard to manage even regarding well-posedeness properties, investigated in [91].
Concerning the numerical approximation issue of (PB), various regularization methods involving both the follower’s optimal reaction set and the follower’s payoff function have been proposed in order to approach problem (PB) via a sequence of Stackelberg problems; for first results, see [29, 75, 77, 78, 88]. These methods, their properties and the results achieved will be presented in Sect. 4.5.
4.3.3 Strong Stackelberg (or Optimistic Bilevel Optimization) Problem
Problem (OB) is ensured to have strong Stackelberg solutions under the same assumptions stated for the existence of solutions of (SP), i.e. by assuming that the action sets X and Y are compact subsets of two Euclidean spaces and that the payoff functions L and F are continuous over X × Y .
The continuity assumptions can be weakened as in Remark 4.3.1, by applying Proposition 4.1.1 in [49] about the lower semicontinuity of the marginal function. △
We remind that results concerning the existence of strong Stackelberg solutions have been first obtained in [53].

We point out that problem (OB), as well as (PB), can exhibit under perturbation a lack of convergence of the strong Stackelberg solutions and of the optimistic values, as illustrated in Example 4.1 in [52], rewritten below for the sake of completeness.
Consider X = Y = [0, 1], L(x, y) = x − y + 1, F(x, y) = x and let L
n(x, y) = L(x, y) and F
n(x, y) = y∕n + x for any  .
.
Though the sequences of functions (L n)n and (F n)n continuously converge to L and F, respectively, the sequence of optimistic values of (OB)n does not converge to the optimistic value of (OB).


However, notions of approximate solutions have been introduced and investigated in [52] in order to face the lack of stability in (OB), whereas achievements on well-posedness can be derived by applying results obtained in [54, 55].
Obviously, as well as in (PB), the non-single-valuedness of the follower’s best reply correspondence M gives rise to difficulties from the numerical point of view in (OB).
4.3.4 Intermediate Stackelberg Problem
Sufficient conditions for the existence of intermediate Stackelberg solutions of (IS D) are investigated in [83, Section 3] in the general case where M(x) is not a discrete set for at least one x ∈ X. However, we point out that problem (IS D) inherits all the difficulties illustrated for (PB) about existence, stability, well-posedness and approximation issues.
4.3.5 Subgame Perfect Nash Equilibrium Problem
When the follower’s best reply correspondence M is not a single-valued map, infinitely many SPNEs could come up in Stackelberg games, as shown in the following example.
![$$\displaystyle \begin{aligned} \varphi^\sigma(x)=\begin{cases} -1, & \mbox{if } x\in[-1,0[ \\ \sigma, & \mbox{if } x=0 \\ 1, & \mbox{if } x\in ]0,1], \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equbd.png)
 . Therefore, the strategy profile (−1, φ
σ) is an SPNE of Γ for any σ ∈ [−1, 1], so Γ has infinitely many SPNEs.
. Therefore, the strategy profile (−1, φ
σ) is an SPNE of Γ for any σ ∈ [−1, 1], so Γ has infinitely many SPNEs.Hence, restricting the number of SPNEs becomes essential and the selection issue arises. For further discussion on the theory of equilibrium selection in games, see [40].
We showed via the second example on page 13 and the example on page 14 that starting from a solution to the associated (PB) or to the associated (OB) one can induce an SPNE motivated according to each of the two different behaviours of the leader. Finding such SPNEs induced by weak or strong Stackelberg solutions, as defined in Definition 4.2.6, provides two methods to select an SPNE in Stackelberg games. Nevertheless such methods can be exploited only in the two extreme situations illustrated before. Anyway they require to the leader of knowing the follower’s best reply correspondence and, at the best of our knowledge, they do not exhibit a manageable constructive approach to achieve an SPNE. △
Furthermore, also the numerical approximation issue matters for the SPNEs in Stackelberg games since M can be not single-valued. Therefore, it would be desirable to design constructive methods in order to select an SPNE with the following features: relieving the leader of knowing M, allowing to overcome the difficulties deriving from the possible non-single-valuedness of M, providing some behavioural motivations of the players (different from the extreme situations described above). Results in this direction have been first obtained in [93], where an SPNE selection method based on Tikhonov regularization is proposed, and more recently in [22], where proximal regularization is employed.
In the rest of the chapter we will again present results under easy-to-manage continuity or convergence assumptions, but we point out that the papers quoted in the statements involve conditions of minimal character, as in Remarks 4.3.1 and 4.3.3.
4.4 Regularizing the Follower’s Optimal Reaction Set in Stackelberg Games
The first attempts for approximating a Stackelberg game Γ = (X, Y, L, F) by a general sequence of perturbed or regularized games have been carried out by Loridan and Morgan. They started in [67, 68, 73] with the case where the second-stage problem (P x) has a unique solution for any x and there is no difference between the optimistic and the pessimistic bilevel optimization problem; then, they extensively investigated in [69–71, 74–77] pessimistic bilevel problems in which the follower’s constraints do not depend on the leader’s actions.

 for i = 1, …, k, and we denote by:
for i = 1, …, k, and we denote by:  the set of solutions to the optimistic bilevel problem (OB), i.e. the set of strong Stackelberg solutions of (OB).
the set of solutions to the optimistic bilevel problem (OB), i.e. the set of strong Stackelberg solutions of (OB). the set of solutions to the pessimistic bilevel problem (PB), i.e. the set of weak Stackelberg solutions of (PB).
the set of solutions to the pessimistic bilevel problem (PB), i.e. the set of weak Stackelberg solutions of (PB).
4.4.1 Regularization of Pessimistic Bilevel Optimization Problems

Let X and Y be nonempty subsets of two Euclidean spaces.
 is lower semicontinuous over X if for any x ∈ X, for any sequence (x
n)n converging to x in X and any y ∈ T(x) there exists a sequence (y
n)n converging to y in Y such that y
n ∈ T(x
n) for n sufficiently large, that is
is lower semicontinuous over X if for any x ∈ X, for any sequence (x
n)n converging to x in X and any y ∈ T(x) there exists a sequence (y
n)n converging to y in Y such that y
n ∈ T(x
n) for n sufficiently large, that is 
 , one has y ∈ T(x), equivalent to
, one has y ∈ T(x), equivalent to 
 and
and  denote, respectively, the Painlevé-Kuratowski lower and upper limit of a sequence of sets.△
denote, respectively, the Painlevé-Kuratowski lower and upper limit of a sequence of sets.△Then, let us recall the well-known maximum theorem [6, 16].
the function L is lower semicontinuous over X × Y ;
the set-valued map
 is lower semicontinuous over X;
is lower semicontinuous over X;

is lower semicontinuous over X.△
4.4.1.1 Approximate and Strict Approximate Solutions
An attempt to present a complete discussion, which aimed to unify all previous results in a general scheme, was given in [51] in the setting of topological vector spaces and by analyzing the second-stage problem in the presence and in the absence of general or inequality constraints. Unfortunately, using Γ-limits and working in a topological setting have restricted the readability and the applicability of that paper, so, here we recall the main idea and the principal results in a simplified form but under more restrictive assumptions.

 the map
the map 
 is lower semicontinuous even if the maps M and M
ε are not.
is lower semicontinuous even if the maps M and M
ε are not. and
and  for every x ∈ ]0, 1];
for every x ∈ ]0, 1]; ;
; ;
;
 ,
,  solve the equation
solve the equation 


 is lower semicontinuous on whole X.
is lower semicontinuous on whole X.In order to prove the lower semicontinuity of  , a crucial role is played both by the lower semicontinuity and closedness of the constraints map K and by the continuity of the follower’s payoff function F, as shown by the next lemmas, which concern, respectively, the continuity and convexity properties of inequality constraints maps and the lower semicontinuity of
, a crucial role is played both by the lower semicontinuity and closedness of the constraints map K and by the continuity of the follower’s payoff function F, as shown by the next lemmas, which concern, respectively, the continuity and convexity properties of inequality constraints maps and the lower semicontinuity of  and M
ε. The first lemma can be found in [13, theorems 3.1.1 and 3.1.6].
and M
ε. The first lemma can be found in [13, theorems 3.1.1 and 3.1.6].
- (C1)
for every i = 1, …, k, the function g iis lower semicontinuous over X × Y ; then, the set-valued map K is closed on X.
If the following assumptions are satisfied:
- (C2)
for every i = 1, …, k and y ∈ Y , the function g i(⋅, y) is upper semicontinuous over X
- (C3)
for every i = 1, …, k and x ∈ X, the function g i(x, ⋅) is strictly quasiconvex (see [ 13]) and upper semicontinuous on Y , which is assumed to be convex;
- (C4)
for every x ∈ X there exists y ∈ Y such that
 ;
;then, the set-valued map K is lower semicontinuous and convex-valued over X. △

Under the assumptions (C
1) − (C
4), if the set X is closed, the set Y is convex and compact and the function F is continuous over X × Y , then the map
 is lower semicontinuous over X.△
is lower semicontinuous over X.△
In order to get the lower semicontinuity of M
ε, a crucial role is also played by suitable convexity properties of the data which guarantee that  for any x ∈ X.
for any x ∈ X.
- (H1)
the function F(x, ⋅) is strictly quasiconvex on K(x), for every x ∈ X
then, the map M εis lower semicontinuous over X.△

 and
and  , defined by
, defined by 
Assume that the set X is compact and the function L is lower semicontinuous over X × Y .
If assumptions of Lemma
4.4.5hold, then the approximate solutions set
 is nonempty for any ε > 0.
is nonempty for any ε > 0.
If assumptions of Lemma
4.4.6hold, then the approximate solutions set
 is nonempty for any ε > 0. △
is nonempty for any ε > 0. △
- do the approximate security values w ε and
 , defined respectively by converge towards the security value w of the original problem when ε tends to zero?
, defined respectively by converge towards the security value w of the original problem when ε tends to zero?
are such approximate solutions stable with respect to perturbations of the data, for any fixed ε > 0?

 . Let, for any n,
. Let, for any n,  is the ε-argmin map of F
n with constraints K
n. More specifically, given k sequences of real valued functions (g
i,n)n defined on X × Y , we set
is the ε-argmin map of F
n with constraints K
n. More specifically, given k sequences of real valued functions (g
i,n)n defined on X × Y , we set 
 the map
the map 
 the set
the set 
 of approximate solutions for (PB)n converges to
of approximate solutions for (PB)n converges to  and one has
and one has 

△
under the assumptions of Proposition 4.4.8, the map M ε may not be lower semicontinuous over X, so this property is not necessary for the approximate security values convergence;
no convexity assumption is made on g i, F and L.
 :
: - (C 3,n )
for every i = 1, …, k and x ∈ X, the function g i,n(x, ⋅) is strictly quasi-convex on Y ;
- (C 4,n )
for every x ∈ X there exists y ∈ Y such that
 ;
;- (H 2,n )
- for any (x, y) ∈ X × Y and any sequence (x n, y n)nconverging to (x, y) in X × Y one has

the ε-solutions are stable, i.e. inclusion in (4.4.3) holds,
the ε-values are stable, i.e.
 .△
.△
We stress that, in general, one cannot prove a result analogous to (4.4.3) also for the strict approximate solutions  , due to the open nature of them. A natural extension of the previous investigations was the research of possible candidates to substitute the lacking weak Stackelberg solutions to (PB), which will be presented in the next subsection.
, due to the open nature of them. A natural extension of the previous investigations was the research of possible candidates to substitute the lacking weak Stackelberg solutions to (PB), which will be presented in the next subsection.
We mention that the approximate solutions presented above have been afterwards employed in [1, 4] (about the strong-weak Stackelberg problem, which generalizes problems (PB) and (OB)) and in [45].
4.4.1.2 Inner Regularizations and Viscosity Solutions
defining regularizing problems which have solutions under not too restrictive conditions;
utilizing sequences of solutions to the regularizing problems admitting convergent subsequences;
considering a limit point of one of such subsequences as a surrogate solution to (PB) provided that the supremum values of the objective functions calculated in such approximating solutions converge to the security value w.
To accomplish the first step, we identify the set-valued map properties that are helpful in this regularization process.
 , where
, where 
 if the conditions below are satisfied:
if the conditions below are satisfied: - (R 1 )
 for every x ∈ X and 0 < ε < η;
for every x ∈ X and 0 < ε < η;- (R 2 )
- for any x ∈ X, any sequence (x n)n converging to x in X and any sequence of positive numbers (ε n)n decreasing to zero, one has

- (R 3 )
 is a lower semicontinuous set-valued map on X, for every ε > 0. △
is a lower semicontinuous set-valued map on X, for every ε > 0. △
The above definition is related to the pessimistic nature of the problem (PB) and we are aware that different problems at the upper level would require different definitions of inner regularizations for the family  .
.
The strict and large ε-argmin maps,  and
and  , constitute inner regularization classes under appropriate conditions.
, constitute inner regularization classes under appropriate conditions.
The family
 is an inner regularization whenever the assumptions of Lemma
4.4.5are satisfied.
is an inner regularization whenever the assumptions of Lemma
4.4.5are satisfied.
The family
 is an inner regularization whenever the assumptions of Lemma
4.4.6are satisfied. △
is an inner regularization whenever the assumptions of Lemma
4.4.6are satisfied. △

The family
 is an inner regularization whenever the assumptions of Lemma
4.4.5are satisfied.
is an inner regularization whenever the assumptions of Lemma
4.4.5are satisfied.
The family
 is an inner regularization whenever the assumptions of Lemma
4.4.6are satisfied. △
is an inner regularization whenever the assumptions of Lemma
4.4.6are satisfied. △
 and
and  could be the maps:
could be the maps: 
- the family
 is an inner regularization whenever assumptions (C
1)–(C
3) and the following hold:
is an inner regularization whenever assumptions (C
1)–(C
3) and the following hold:
- (C 5 )
for every ε > 0 and x ∈ X there exists y ∈ Y such that
 ;
;
the family
 is an inner regularization whenever the assumptions (C
1)–(C
3), (C
5) and (H
1) are satisfied.△
is an inner regularization whenever the assumptions (C
1)–(C
3), (C
5) and (H
1) are satisfied.△


The next steps consist in introducing the concept of viscosity solution for pessimistic bilevel optimization problems related to an inner regularization class and in stating a related existence result.
 be an inner regularization for the family
be an inner regularization for the family  . A point
. A point  is a
is a  -viscosity solution for (PB) if for every sequence (ε
n)n decreasing to zero there exists
-viscosity solution for (PB) if for every sequence (ε
n)n decreasing to zero there exists  ,
,  for any
for any  , such that:
, such that: - (V 1 )
a subsequence of
 converges to
converges to  ;
;- (V 2 )

- (V 3 )
 △
△
If
 is an inner regularization for the family
is an inner regularization for the family
 , the sets X and Y are compact and the function L is continuous over X × Y , then there exists a
, the sets X and Y are compact and the function L is continuous over X × Y , then there exists a
 -viscosity solution for the pessimistic problem (PB). △
-viscosity solution for the pessimistic problem (PB). △
Suitable existence results of viscosity solutions with respect to each of the families considered above can be derived from Theorem 4.4.15 and Propositions 4.4.11, 4.4.12, and 4.4.13.
The next example illustrates the above procedure in a simple case.
the argmin map M of the minima to (P x) is not lower semicontinuous at x = 0, since M(0) = Y and
 for every x ∈ ]0, 1];
for every x ∈ ]0, 1];the marginal function e(⋅) is not lower semicontinuous at x = 0, since e(0) = 1 and e(x) = x − 1 for every x ∈ ]0, 1];
the problem (PB) does not have a solution since
 but e(x) > −1 for every x ∈ [0, 1];
but e(x) > −1 for every x ∈ [0, 1];the map
 is lower semicontinuous over X since
is lower semicontinuous over X since ![$$\widetilde {M}^\varepsilon _d(x)= [-1,1]$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_IEq151.png) if x ∈ [0, ε∕2[ and
if x ∈ [0, ε∕2[ and  if x ∈ [ε∕2, 1];
if x ∈ [ε∕2, 1];- the minimum point of the marginal function
 is
is  and
and 
the family
 is an inner regularization even if the function g
1(x, ⋅) is not strictly quasiconvex (see Remark 4.4.4);
is an inner regularization even if the function g
1(x, ⋅) is not strictly quasiconvex (see Remark 4.4.4);the data satisfy the conditions in Theorem 4.4.15;
the
 -viscosity solution for (PB) is x = 0.
-viscosity solution for (PB) is x = 0.
4.4.2 Regularization of Optimistic Bilevel Optimization Problems
As we observed in Sect. 4.3.3, a strong Stackelberg equilibrium exists under not too restrictive conditions. However, when such a problem has to be approached by a sequence of perturbed problems (e.g. in discretization process of (OB) in an infinite dimensional setting), the perturbed solutions may not converge towards a solution of the original problem, that is such problems are lacking in stability in the sense specified in Sect. 4.4.1.1.

 and, for any n, K
n is defined as in (4.4.2) and M
n is the argmin map of F
n with constraints K
n. Then, denoted by
and, for any n, K
n is defined as in (4.4.2) and M
n is the argmin map of F
n with constraints K
n. Then, denoted by  the set of solutions to (OB)n, for any
the set of solutions to (OB)n, for any  , one asks if one has
, one asks if one has 
(F n)n and (L n)n uniformly converge, and therefore also continuously converge, to the functions defined by F(x, y) = 0 and L(x, y) = −xy respectively;
M(x) = [0, 1] and, for any
 ,
,  for every x ∈ [0, 1];
for every x ∈ [0, 1]; and, for any
and, for any  ,
, ![$$\mathcal {S}_n=[0,1]$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_IEq164.png) .
.

Nevertheless, also in the optimistic case, regularizing the follower’s reaction set turns out to be useful to obtain satisfactory approximation results for the strong Stackelberg values and solutions.


△
 :
: - (H 3,n )
- for any (x, y) ∈ X × Y and any sequence (x n, y n)nconverging to (x, y) in X × Y one has



△

(F n)n and (L n)n continuously converge on X × Y to the functions defined by F(x, y) = 0 and L(x, y) = x(x − y) respectively;
M(x) = M ε(x) = [0, 1] for every x ∈ X;
for any
 ,
, ![$$M^\varepsilon _n(x)= [0,n\varepsilon ]$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_IEq168.png) if nε ≤ 1 and
if nε ≤ 1 and ![$$M^\varepsilon _n(x)=[0,1]$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_IEq169.png) if nε > 1;
if nε > 1; and, for any
and, for any  ,
,  if nε ≤ 1 and
if nε ≤ 1 and  if nε > 1.
if nε > 1.

 if the sequence (ε
n)n is infinitesimal of the first order.
if the sequence (ε
n)n is infinitesimal of the first order.It would be interesting defining suitable viscosity solutions also for optimistic bilevel optimization problems aimed to reach an inclusion analogous to (4.4.4).
This is a still unexplored topic, but given an optimistic bilevel problem approached by a sequence of approximating optimistic bilevel problems (OB)n, it seems to be reasonable investigating the limit points of sequences of solutions to (OB)n that are not so far from the solution set to (OB).
We mention that algorithms to approach approximate solutions to (OB) have been developed in [66], where the reformulation of (OB) via the optimal value function is exploited, and in [44], where a reformulation of (OB) as a generalized Nash equilibrium problem is employed.
4.4.3 Regularization of Bilevel Problems with Equilibrium Constraints
Stackelberg games are models that can be naturally extended to the case where there are one leader and one, or more than one, follower who solve a second-stage problem described by a parametric variational inequality, Nash equilibrium, quasi-variational inequality or more generally quasi-equilibrium. The critical issues of pessimistic and optimistic approach are still present and regularizing the problem solved by the follower(s) is useful also in this case. First we present the case where one solves a variational inequality in the second stage. The set of solutions of such a parametric variational inequality can be considered as the follower’s constraints in the first stage, so traditionally the associate bilevel problem is called bilevel problem with variational inequality constraints, and analogously for the other problems considered in the second stage.
4.4.3.1 Variational Inequality Constraints
 , where any problem (V
x) consists in finding, see [12],
, where any problem (V
x) consists in finding, see [12], 


 is the set of solutions to the variational inequality (V
x).
is the set of solutions to the variational inequality (V
x).

 follows from using the Minty type variational inequality, which consists in finding
follows from using the Minty type variational inequality, which consists in finding 
The above regularizations have been employed for investigating, in a theoretical setting, well-posedness in [54] and stability properties in [50] of (OBV I) in Banach spaces; moreover, we mention that an exact penalization scheme has been proposed in [112] for deriving necessary optimality conditions of (OBV I). Convergence properties of the approximate weak Stackelberg values of (PBV I) can be found in [57] in finite dimensional spaces. They have been also considered, in applied framework as truss topology optimization in [36] or climate regulation policy in [34].
4.4.3.2 Nash Equilibrium Constraints
 and l real-valued functions F
1, …, F
l defined on X × Y . Then, for any x ∈ X, the Nash equilibrium problem
and l real-valued functions F
1, …, F
l defined on X × Y . Then, for any x ∈ X, the Nash equilibrium problem  consists in finding
consists in finding 


 is the set of solutions to the Nash equilibrium problem
is the set of solutions to the Nash equilibrium problem  .
.


4.4.3.3 Quasi-Variational Inequality Constraints
 , where any (Q
x) consists in finding, see [12],
, where any (Q
x) consists in finding, see [12], 


 is the set of solutions to the quasi-variational inequality (Q
x).
is the set of solutions to the quasi-variational inequality (Q
x).

Requiring that an approximate solution to (Q x) may violate the constraints, provided that it remains in a neighborhood of them, is quite necessary in quasi-variational inequality setting where a fixed-point problem is involved, as shown in [48, Ex. 2.1]. The above regularizations have been used in [59] for establishing convergence results of the weak Stackelberg values of (PBQI) in finite dimensional spaces, and in [61] for a complete investigation in infinite dimensional spaces of convergence properties of approximate solutions and values of (OBQI) problems, there called semi-quasivariational optimistic bilevel problems.
4.4.3.4 Quasi-Equilibrium Constraints
 (also called quasi-variational problem in [58]) consists in finding y ∈ Y such that
(also called quasi-variational problem in [58]) consists in finding y ∈ Y such that 
 was introduced and it was proved that the map
was introduced and it was proved that the map  defined by
defined by 
 may fail to be an inner regularization under the same hypotheses. The results were established in infinite dimensional Banach spaces, so it had been necessary to balance the use of weak and strong convergence in the assumptions, but, in finite dimensional spaces, the statements can be simplified and made more readable.
may fail to be an inner regularization under the same hypotheses. The results were established in infinite dimensional Banach spaces, so it had been necessary to balance the use of weak and strong convergence in the assumptions, but, in finite dimensional spaces, the statements can be simplified and made more readable.4.5 Regularizing the Follower’s Payoff Function in Stackelberg Games
The general non-single-valuedness of the follower’s best reply correspondence M brings out the difficulties in the numerical approximation of problems (PB) and (OB), as mentioned in Sect. 4.3.3, as well as the need to define constructive methods for selecting an SPNE in Stackelberg games, as emphasized in Sect. 4.3.5. For these reasons and possibly also for behavioural motivations (see, for example, [22]), regularization methods involving the follower’s payoff function have been introduced. Such methods allow to construct sequences of perturbed problems where the solution of the second-stage problem is unique by exploiting well-known regularization techniques in convex optimization. For the sake of brevity, we will present only two approaches for regularizing the follower’s payoff function: the first one is based on the Tikhonov regularization, the second one on the proximal regularization.
In this section we assume that the leader’s and follower’s action sets X and Y are subsets of the Euclidean spaces  and
and  , respectively, and we denote by
, respectively, and we denote by  and
and  the norm of
the norm of  and
and  , respectively. Furthermore, for the sake of brevity, both leader’s and follower’s constraints are assumed to be constant.
, respectively. Furthermore, for the sake of brevity, both leader’s and follower’s constraints are assumed to be constant.
4.5.1 Regularizing the Follower’s Payoff Function via Tikhonov Method
Let us recall preliminarily the Tikhonov regularization method for the approximation of solutions to convex optimization problems. Then, we illustrate how it has been employed to regularize bilevel optimization problems (PB) or (OB) and to select SPNEs.
4.5.1.1 Tikhonov Regularization in Convex Optimization

 with norm
with norm  . In [107] Tikhonov introduced, in an optimal control framework, the following perturbed minimization problems
. In [107] Tikhonov introduced, in an optimal control framework, the following perturbed minimization problems 
 and λ
n > 0, and he proved the connections between the solutions to problem
and λ
n > 0, and he proved the connections between the solutions to problem  and the solutions to problem (P), which are recalled in the next well-known result.
and the solutions to problem (P), which are recalled in the next well-known result.Assume that the set A is compact and convex, the function J is lower semicontinuous and convex over A and limn→+∞λ n = +∞.
 has a unique solution
has a unique solution
 , for any
, for any
 , and the sequence
, and the sequence
 is convergent to the minimum norm element of the set of the minimizers of J over A, so
is convergent to the minimum norm element of the set of the minimizers of J over A, so

where
 . △
. △
Therefore, the Tikhonov regularization method allows to approach a solution of a convex minimization problem by constructing a sequence of perturbed problems, in general better-behaved than the original problem, that have a unique solution. Furthermore, the limit of the sequence generated accordingly is uniquely characterized in the set of solutions to the original problem.
We mention that, afterwards, Tikhonov regularization has been broadly exploited for finding Nash equilibria in one-stage games where players move simultaneously: see [7, 47] for zero-sum games (with applications also to differential games) and [93, Section 4], [25, 43] for general N-players games.
4.5.1.2 Tikhonov Regularization of the Follower’s Payoff Function in Stackelberg Games

 and λ
n > 0. The next result states preliminarily properties about the connections between the perturbed problems
and λ
n > 0. The next result states preliminarily properties about the connections between the perturbed problems  and problem (P
x) as n goes to + ∞.
and problem (P
x) as n goes to + ∞.Assume that the set Y is compact and convex, the function F is continuous over X × Y and limn→+∞λ n = +∞.
 ;
; .△
.△
We highlight that the sequence of functions generated by Tikhonov-regularizing the follower’s payoff function satisfies assumptions (F1), (F2) and  in [71, Section 4], therefore additional results involving ε-solutions and strict ε-solutions hold by applying propositions 4.2, 4.4 and 6.1 in [71]. For instance, the inclusion stated in Proposition 4.5.2 above is still valid even when considering ε-argmin maps. △
in [71, Section 4], therefore additional results involving ε-solutions and strict ε-solutions hold by applying propositions 4.2, 4.4 and 6.1 in [71]. For instance, the inclusion stated in Proposition 4.5.2 above is still valid even when considering ε-argmin maps. △
More specific results concerning problems  and the connections with (P
x) are achieved by adding a convexity assumption, usual in a Tikhonov regularization framework.
and the connections with (P
x) are achieved by adding a convexity assumption, usual in a Tikhonov regularization framework.
Assume that the function F(x, ⋅) is convex over Y for any x ∈ X and hypotheses of Proposition 4.5.2are satisfied.
- problem
 has a unique solution
has a unique solution
 for any
for any
 , that is
, that is
 (4.5.1)
(4.5.1)  , where
, where
 is the minimum norm element of the set M(x), that is
is the minimum norm element of the set M(x), that is
 (4.5.2)
(4.5.2)
 and any sequence (x
k)kconverging to x in X, we have
and any sequence (x
k)kconverging to x in X, we have

△
Under the assumptions of Proposition 4.5.4 additional results regarding ε-solutions have been proved in [77, Proposition 3.3] for the Tikhonov-regularized problem  . △
. △
We point out that, in general, the sequence  is not continuously convergent to
is not continuously convergent to  (for the definition of continuous convergence see Proposition 4.3.2), as shown in [77, Remark 3.1] and in the example below.
(for the definition of continuous convergence see Proposition 4.3.2), as shown in [77, Remark 3.1] and in the example below.
 May Not Be Continuously Convergent
May Not Be Continuously Convergent
![$$\displaystyle \begin{aligned} \bar\varphi^{\mathcal{T}}_n(x)=\begin{cases} -1, & \mbox{if } x\in[-1,-1/n[ \\ nx, & \mbox{if } x\in[-1/n,1/n] \\ 1, & \mbox{if } x\in ]1/n,1] \end{cases}\quad \text{and}\quad \hat\varphi(x)=\begin{cases} -1, & \mbox{if } x\in[-1,0[ \\ 0, & \mbox{if } x=0 \\ 1, & \mbox{if } x\in ]0,1]. \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equdh.png)
 is not continuously convergent to
is not continuously convergent to  , as the function
, as the function  is not continuous at x = 0.
is not continuous at x = 0.
 is a Stackelberg problem for any
is a Stackelberg problem for any  since the solution to the second-stage problem is unique. Two questions arise:
since the solution to the second-stage problem is unique. Two questions arise: - 1.
Are there solutions to
 ?
? - 2.
What happens when n → +∞?
Assume that the set X is compact, Y is compact and convex, the functions L and F are continuous over X × Y and the function F(x, ⋅) is convex over Y for any x ∈ X.
Then, the Tikhonov-regularized Stackelberg problem
 has at least one solution, for any
has at least one solution, for any
 . △
. △
As regards to investigation on the connections between  and (PB) as n goes to + ∞, the second question is addressed in the following result.
and (PB) as n goes to + ∞, the second question is addressed in the following result.
Assume that limn→+∞λ
n = +∞ and hypotheses of Proposition
4.5.6are satisfied. Denote with
 a solution to
a solution to
 for any
for any
 .
.
 in X × Y has a limit
in X × Y has a limit
 which satisfies
which satisfies

where w is the security value of (PB) defined in Definition 4.2.2. △
An action profile  satisfying (4.5.3) is a lower Stackelberg equilibrium pair for problem (PB).△
satisfying (4.5.3) is a lower Stackelberg equilibrium pair for problem (PB).△
The lower Stackelberg equilibrium pair solution concept was introduced in [69, Remark 5.3] in the context of approximation of (PB) via ε-solutions. Note that a result analogous to Proposition 4.5.7 has been obtained in [75] for the least-norm regularization of the second-stage problem of (PB). In fact such a regularization, which is an adaptation of the method introduced in [104] and which involves the regularization both of the follower’s optimal reaction set and of the follower’s payoff function, generates sequences of action profiles whose limit points are lower Stackelberg equilibrium pairs, as proved in propositions 2.6 and 3.5 in [75].
We observe that if  is a weak Stackelberg equilibrium of (PB), then
is a weak Stackelberg equilibrium of (PB), then  is a lower Stackelberg equilibrium pair. The converse is not true, in general, as illustrated in the following example.
is a lower Stackelberg equilibrium pair. The converse is not true, in general, as illustrated in the following example.
![$$\displaystyle \begin{aligned} L(x,y)=-x-y\quad \text{and}\quad F(x,y)=\begin{cases} 0, & \mbox{if } x\in[1/2,1[ \\ (x-1)y, & \mbox{if } x\in [1,2]. \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equdj.png)
It is worth to emphasize that, in general, the sequence  , where
, where  is a solution to
is a solution to  , converges neither to a weak Stackelberg (or pessimistic) solution of (PB) nor to a strong Stackelberg (or optimistic) solution of (OB); analogously, the sequence
, converges neither to a weak Stackelberg (or pessimistic) solution of (PB) nor to a strong Stackelberg (or optimistic) solution of (OB); analogously, the sequence  converges, in general, neither to a weak Stackelberg equilibrium nor to a strong Stackelberg equilibrium, as illustrated in the next example also used in [93]. △
converges, in general, neither to a weak Stackelberg equilibrium nor to a strong Stackelberg equilibrium, as illustrated in the next example also used in [93]. △
 May Converge Neither to a Weak Stackelberg Equilibrium Nor to a Strong Stackelberg Equilibrium
May Converge Neither to a Weak Stackelberg Equilibrium Nor to a Strong Stackelberg Equilibrium
![$$\displaystyle \begin{aligned} L(x,y)=-x-y\quad \text{and}\quad F(x,y)=\begin{cases} (x+1/4)y, & \mbox{if } x\in[-1/2,-1/4[ \\ 0, & \mbox{if } x\in[-1/4,1/4] \\ (x-1/4)y, & \mbox{if } x\in ]1/4,1/2]. \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equdk.png)
 and
and  converge to − 1∕4 and (−1∕4, 1), respectively. Instead, the strong Stackelberg solution is 1∕4 and the strong Stackelberg equilibrium is (1∕4, 1), whereas the weak Stackelberg solution and the weak Stackelberg equilibrium do not exist.
converge to − 1∕4 and (−1∕4, 1), respectively. Instead, the strong Stackelberg solution is 1∕4 and the strong Stackelberg equilibrium is (1∕4, 1), whereas the weak Stackelberg solution and the weak Stackelberg equilibrium do not exist.Afterwards, the Tikhonov regularization approach illustrated up to now has been employed in [27] where, by requiring stronger assumptions on the payoff functions, further regularity properties for the Tikhonov-regularized second-stage problem  have been shown. Moreover, an algorithm have been designed for the solutions of the Tikhonov-regularized Stackelberg problem
have been shown. Moreover, an algorithm have been designed for the solutions of the Tikhonov-regularized Stackelberg problem  as n goes to + ∞.
as n goes to + ∞.
 consists in considering the following perturbed second-stage problems
consists in considering the following perturbed second-stage problems 
 , provided that the function L(x, ⋅) is strongly convex on Y for any x ∈ X. In [29] such a Tikhonov-like approach has been investigated for problem (OB), in order to circumvent the non-uniqueness of the solutions to the second-stage problem, and an algorithm has been proposed. Further discussions on this kind of regularization can be found in [28, Subsection 7.3.2].
, provided that the function L(x, ⋅) is strongly convex on Y for any x ∈ X. In [29] such a Tikhonov-like approach has been investigated for problem (OB), in order to circumvent the non-uniqueness of the solutions to the second-stage problem, and an algorithm has been proposed. Further discussions on this kind of regularization can be found in [28, Subsection 7.3.2].We highlight that the idea of using the leader’s payoff function in the regularization of the second-stage problem goes back to Molodtsov in [88]: he introduced a “mixed” regularization method, by combining both the regularization of the follower’s reaction set and the regularization of the follower’s payoff function, which allows to approximate problem (PB) via a sequence of strong Stackelberg problems. Then, more general properties of the Molodtsov regularization have been obtained in [78], where perturbations of the data of problem (PB) have been also considered.
4.5.1.3 Selection of SPNEs via Tikhonov Regularization
A Stackelberg game where the follower’s best reply correspondence M is not single-valued could have infinitely many SPNEs, as illustrated in the example on page 23. Therefore, let us focus on how restricting the number of SPNEs or, better yet, picking just one. The first attempt to select an SPNE via a constructive approach that allows to overcame the non-single-valuedness of M is due to Morgan and Patrone in [93], where the Tikhonov regularization approach presented in Sect. 4.5.1.2 was exploited.

 is defined on X × Y by
is defined on X × Y by 
 , i.e.
, i.e.  is the game obtained from Γ by replacing the follower’s payoff function F with the objective function of the Tikhonov-regularized problem
is the game obtained from Γ by replacing the follower’s payoff function F with the objective function of the Tikhonov-regularized problem  . Propositions 4.5.4 and 4.5.6 imply the following properties for
. Propositions 4.5.4 and 4.5.6 imply the following properties for  .
. ,
, the follower’s best reply correspondence in
 is single-valued;
is single-valued;
the game
 has at least one SPNE: the strategy profile
has at least one SPNE: the strategy profile
 , where
, where
 is defined in (4.5.1) and
is defined in (4.5.1) and
 is a solution to
is a solution to
 , is an SPNE of
, is an SPNE of
 .
.
Moreover, the sequence of strategies
 is pointwise convergent to the function
is pointwise convergent to the function
 defined in (4.5.2). △
defined in (4.5.2). △
It is natural to ask if the limit of the sequence of SPNEs  , associated to the sequence of perturbed Stackelberg games
, associated to the sequence of perturbed Stackelberg games  , is an SPNE of the original game Γ. The answer is negative, in general, as displayed in the example below.
, is an SPNE of the original game Γ. The answer is negative, in general, as displayed in the example below.
 May Not Converge to an SPNE of the Original Game
May Not Converge to an SPNE of the Original Game
 is
is  where
where  and the function
and the function  is derived in the example on page 43; moreover
is derived in the example on page 43; moreover 





In order to achieve an SPNE of Γ we need to take into account the limit of the sequence of action profiles  .
.
Assume that limn→+∞λ
n = +∞ and hypotheses of Proposition
4.5.6are satisfied. Denote with
 an SPNE of
an SPNE of
 , as defined in Corollary
4.5.10, for any
, as defined in Corollary
4.5.10, for any
 .
.
 converges to
converges to
 in X × Y , then the strategy profile
in X × Y , then the strategy profile
 where
where

with
 defined in (4.5.2), is an SPNE of Γ. △
defined in (4.5.2), is an SPNE of Γ. △
 for any
for any  and
and  . Therefore, the SPNE selected according to Theorem 4.5.11 is
. Therefore, the SPNE selected according to Theorem 4.5.11 is  where the function
where the function  is defined on X by
is defined on X by ![$$\displaystyle \begin{aligned} \widetilde\varphi^{\mathcal{T}}(x)=\begin{cases} -1, & \mbox{if } x\in [-1,0] \\ 1, & \mbox{if } x\in ]0,1]. \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equdq.png)
 for any x ∈ X and
for any x ∈ X and  . △
. △The following example shows that the SPNE selected according to Theorem 4.5.11 does not coincide, in general, with the SPNEs induced by a weak or a strong Stackelberg solution, as defined in Definition 4.2.6.
 converges to (7∕4, 0), so the SPNE selected according to Theorem 4.5.11 is the strategy profile
converges to (7∕4, 0), so the SPNE selected according to Theorem 4.5.11 is the strategy profile  where
where ![$$\displaystyle \begin{aligned} \widetilde\varphi^{\mathcal{T}}(x)=\begin{cases} 1, & \mbox{if } x\in[-2,-7/4[ \\ 0, & \mbox{if } x\in[-7/4,7/4] \\ -1, & \mbox{if } x\in]7/4,2]. \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equdr.png)
The Tikhonov approach to select SPNEs presented in this subsection has been extended also to the class of one-leader two-follower Stackelberg games in [93, Section 4]. In this case the two followers, after having observed the action x chosen by the leader, face a parametric two-player Nash equilibrium problem  (see Sect. 4.4.3.2). By Tikhonov-regularizing the followers’ payoff functions in problem
(see Sect. 4.4.3.2). By Tikhonov-regularizing the followers’ payoff functions in problem  , a sequence of perturbed one-leader two-follower Stackelberg games has been defined where the solution to the Nash equilibrium problem in the second-stage is unique. This allows to select an SPNE similarly to Theorem 4.5.11, as proved in theorems 4.1 and 4.2 in [93].
, a sequence of perturbed one-leader two-follower Stackelberg games has been defined where the solution to the Nash equilibrium problem in the second-stage is unique. This allows to select an SPNE similarly to Theorem 4.5.11, as proved in theorems 4.1 and 4.2 in [93].
4.5.2 Regularizing the Follower’s Payoff Function via Proximal Method
Let us recall firstly the proximal regularization method for approximating the solutions of a convex optimization problem. Then, we show how it can be employed to regularize bilevel optimization problems (PB) or (OB) and to select SPNEs involving behavioural motivations.
4.5.2.1 Proximal-Point Algorithm in Convex Optimization

 with norm
with norm  . The algorithm defined below has been introduced by Martinet in [86] for regularizing variational inequalities and by Rockafellar in [99] for finding zeros of maximal monotone operators.
. The algorithm defined below has been introduced by Martinet in [86] for regularizing variational inequalities and by Rockafellar in [99] for finding zeros of maximal monotone operators.
The well-definedness of algorithm (PA) and its convergence properties are recalled in the following well-known result stated in [99].
Assume that the set A is compact and convex, the function J is lower semicontinuous and convex over A and
 .
.
 is convergent to a solution of problem (P), that is
is convergent to a solution of problem (P), that is

△
![$$J_{\gamma }^{\mathcal {P}}\colon A\to [-\infty ,+\infty ]$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_IEq297.png) defined on A by
defined on A by 

the proximal-regularized problems
 are recursively defined, differently from the Tikhonov-regularized problems
are recursively defined, differently from the Tikhonov-regularized problems  in Sect. 4.5.1.1;
in Sect. 4.5.1.1;the limit of the sequence generated by (PA) is “just” a minimizer of J over A, while in the Tikhonov approach the limit point is characterized as the minimum norm element in the set of minimizers of J over A;
as regards to the assumptions ensuring the convergence of algorithm (PA) and of Tikhonov method, the hypothesis on the sequence of parameters (γ n)n in Theorem 4.5.13 is weaker than the corresponding hypothesis on (λ n)n in Theorem 4.5.1.
4.5.2.2 Proximal Regularization of the Follower’s Payoff Function in Stackelberg Games
 , define for any
, define for any 

 and
and  for any x ∈ X.
for any x ∈ X.Assume that Y is compact and convex, the function F is continuous over X × Y , the function F(x, ⋅) is convex over Y for any x ∈ X and  . From Theorem 4.5.13 it straightforwardly follows that, for any x ∈ X, the sequence
. From Theorem 4.5.13 it straightforwardly follows that, for any x ∈ X, the sequence  is well-defined and
is well-defined and  . △
. △


 is unique for any
is unique for any  . Analogously to Sect. 4.5.1.2, we are interested in two questions.
. Analogously to Sect. 4.5.1.2, we are interested in two questions. - 1.
Are there solutions to
 ?
? - 2.
What happens when n → +∞?
 defined in (4.5.4) is continuous over X, so the next proposition provides the answer to the first question.
defined in (4.5.4) is continuous over X, so the next proposition provides the answer to the first question.Assume that the set X is compact, Y is compact and convex, the functions L and F are continuous over X × Y and the function F(x, ⋅) is convex over Y for any x ∈ X.
Then, the proximal-regularized Stackelberg problem
 has at least one solution, for any
has at least one solution, for any
 . △
. △
Concerning the second question, the limit of the sequence generated by the solutions to  for any
for any  has no connections, in general, either with weak Stackelberg (or pessimistic) solutions to (PB) or with strong Stackelberg (or optimistic) solutions to (OB), as illustrated in the following example also used in [22].
has no connections, in general, either with weak Stackelberg (or pessimistic) solutions to (PB) or with strong Stackelberg (or optimistic) solutions to (OB), as illustrated in the following example also used in [22].
 May Not Converge to Weak or to Strong Stackelberg Solutions
May Not Converge to Weak or to Strong Stackelberg Solutions
![$$\displaystyle \begin{aligned} L(x,y)=x+y\quad \text{and}\quad F(x,y)=\begin{cases} 0, & \mbox{if } x\in[1/2,1[ \\ (x-1)y, & \mbox{if } x\in [1,2]. \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equdy.png)
 and γ
n = n, we obtain
and γ
n = n, we obtain ![$$\displaystyle \begin{aligned} \bar\varphi^{\mathcal{P}}_n(x)=\begin{cases} 1, & \mbox{if } x\in [{1}/{2},1] \\ c_n-c_nx+1, & \mbox{if } x\in ]1,1+{2}/{c_n}] \\ -1, & \mbox{if } x\in ]1+{2}/{c_n},2], \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equdz.png)
 is
is 
 converges to 1, which is neither a weak nor a strong Stackelberg solution. In fact, a solution to (PB) does not exist, whereas the solution to (OB) is 1∕2. Consequently, even the sequence
converges to 1, which is neither a weak nor a strong Stackelberg solution. In fact, a solution to (PB) does not exist, whereas the solution to (OB) is 1∕2. Consequently, even the sequence  does not converge either to a weak or to a strong Stackelberg equilibrium.
does not converge either to a weak or to a strong Stackelberg equilibrium. is not continuously convergent. In fact, coming back to such an example, it is sufficient to note that the pointwise limit of
is not continuously convergent. In fact, coming back to such an example, it is sufficient to note that the pointwise limit of  defined by
defined by ![$$\displaystyle \begin{aligned} \lim_{n\to+\infty}\bar\varphi^{\mathcal{P}}_n(x)=\begin{cases} 1, & \mbox{if } x\in[1/2,1] \\ -1, & \mbox{if } x\in ]1,2], \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equeb.png)

 and l and f real-valued convex functions defined on
and l and f real-valued convex functions defined on  . Such a problem, firstly studied in [106] and labelled as “simple” in [30], involves a non-parametric second-stage problem differently from the general definitions of (PB) and (OB), and its solutions clearly coincide with the weak and strong Stackelberg solutions. Consequently, problem (SBP) does not entail the same kind of inherent difficulties that bilevel optimization problems (PB) and (OB) exhibit regarding the regularization issue, as illustrated in this subsection and in Sect. 4.5.1.2.
. Such a problem, firstly studied in [106] and labelled as “simple” in [30], involves a non-parametric second-stage problem differently from the general definitions of (PB) and (OB), and its solutions clearly coincide with the weak and strong Stackelberg solutions. Consequently, problem (SBP) does not entail the same kind of inherent difficulties that bilevel optimization problems (PB) and (OB) exhibit regarding the regularization issue, as illustrated in this subsection and in Sect. 4.5.1.2.4.5.2.3 Selection of SPNEs via Proximal Regularization
Let us present now how proximal regularization has been employed in Stackelberg games in order to select SPNEs. Caruso, Ceparano and Morgan introduced in [22] a behavioural motivated constructive method which involves the proximal regularization both in the second-stage and in the first-stage problem (the additional regularization of the leader’s payoff function has been done in order to strongly motivate the behavioural interpretation of the method). Anyway, if the proximal regularization is carried out only in the second-stage problem, by arguing analogously as in the proofs in [22], a selection result for SPNEs can be proved even in such a case.
Let Γ = (X, Y, L, F) be a Stackelberg game and consider the following procedure.
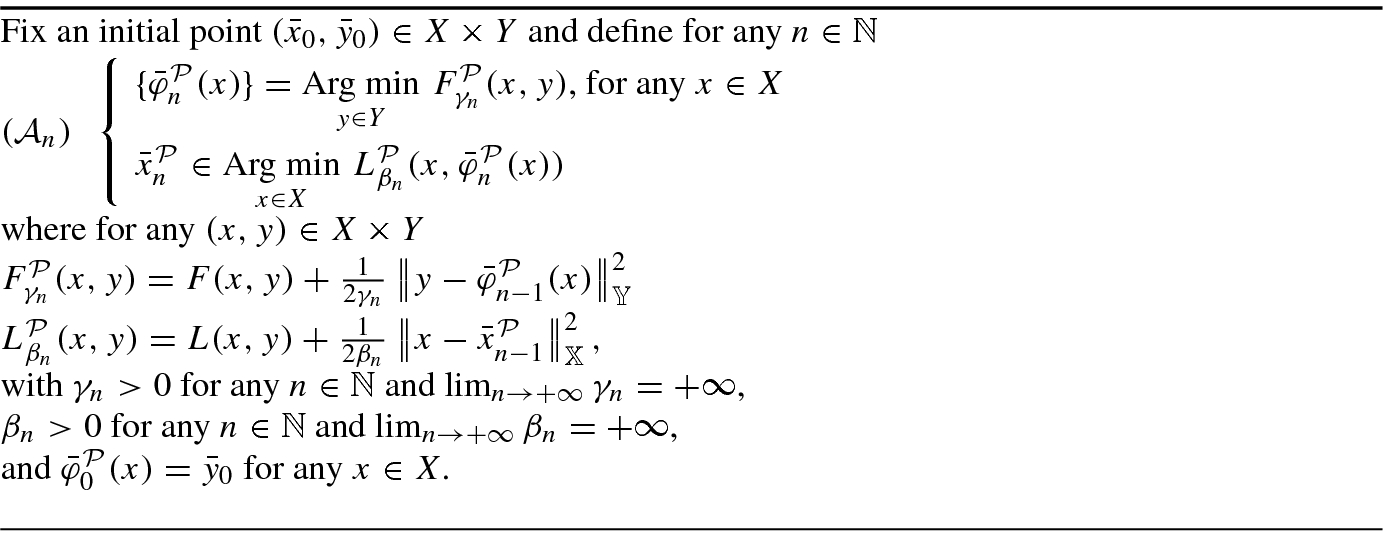
Procedure (SGP) allows to construct recursively a sequence of strategies  , where
, where  is a function from X to Y , and a sequence of leader’s actions
is a function from X to Y , and a sequence of leader’s actions  , where
, where  . We point out that looking only at the follower’s stage in procedure (SGP), one can recognize the same approach illustrated in Sect. 4.5.2.2 (for this reason here we kept unchanged the notation
. We point out that looking only at the follower’s stage in procedure (SGP), one can recognize the same approach illustrated in Sect. 4.5.2.2 (for this reason here we kept unchanged the notation  used previously).
used previously).
In the next proposition, the well-definedness of procedure (SGP) and its regularity and convergence properties are stated.
procedure (SGP) is well-defined;
- for any sequence (x k)kconverging to x in X, we have

for any x ∈ X the sequence
 is convergent in Y to a solution of problem (P
x).△
is convergent in Y to a solution of problem (P
x).△
 where
where 
 and
and  and υ
n = (β
n, γ
n). Then, Proposition 4.5.17 shows in particular that for any
and υ
n = (β
n, γ
n). Then, Proposition 4.5.17 shows in particular that for any  the follower’s best reply correspondence in
the follower’s best reply correspondence in  is single-valued and that the strategy profile
is single-valued and that the strategy profile  generated at step
generated at step  of procedure (SGP) is an SPNE of
of procedure (SGP) is an SPNE of  obtained as update of
obtained as update of  , SPNE of
, SPNE of  .
.Before stating the SPNE selection result, we highlight that procedure (SGP) has a behavioural interpretation linked to the costs that players face when deviating from their current actions, which is presented below.
At the generic step  of procedure (SGP), the follower chooses his strategy
of procedure (SGP), the follower chooses his strategy  taking into account his previous strategy
taking into account his previous strategy  . In making such a choice, he finds an action that compromises between minimizing F(x, ⋅) and being near to
. In making such a choice, he finds an action that compromises between minimizing F(x, ⋅) and being near to  , for any x ∈ X. The latter purpose is motivated according to an anchoring effect, explained in [5, Subsection 1.4], which is formulated by adding a quadratic slight cost to move that reflects the difficulty of changing the previous action. The coefficient γ
n is linked to the per unit of distance cost to move of the follower and it is related to the trade-off parameter between minimizing F(x, ⋅) and minimizing the distance from
, for any x ∈ X. The latter purpose is motivated according to an anchoring effect, explained in [5, Subsection 1.4], which is formulated by adding a quadratic slight cost to move that reflects the difficulty of changing the previous action. The coefficient γ
n is linked to the per unit of distance cost to move of the follower and it is related to the trade-off parameter between minimizing F(x, ⋅) and minimizing the distance from  . Since the same arguments apply for the preceding steps until going up to step
. Since the same arguments apply for the preceding steps until going up to step  , it follows that
, it follows that  as well as the limit of
as well as the limit of  embed the willingness of being near to
embed the willingness of being near to  . Analogous observations hold also for the leader, who chooses an action having in mind to be near to his previous choices, and therefore even with the purpose of being near to
. Analogous observations hold also for the leader, who chooses an action having in mind to be near to his previous choices, and therefore even with the purpose of being near to  .
.
By taking into account the limit of the sequence of action profiles  , the following existence result of an SPNE’s selection holds.
, the following existence result of an SPNE’s selection holds.
Assume that hypotheses of Proposition
4.5.16are satisfied and let
 be the sequence of strategy profiles generated by procedure (SGP).
be the sequence of strategy profiles generated by procedure (SGP).
 converges to
converges to
 in X × Y , then the strategy profile
in X × Y , then the strategy profile
 where
where

is an SPNE of Γ. △
 of SPNEs of the proximal-regularized games
of SPNEs of the proximal-regularized games  could not converge to an SPNE of Γ. This happens because the follower’s strategy
could not converge to an SPNE of Γ. This happens because the follower’s strategy  in the SPNE defined according to Theorem 4.5.18 could differ from the pointwise limit, whose existence is ensured by Proposition 4.5.17, of sequence
in the SPNE defined according to Theorem 4.5.18 could differ from the pointwise limit, whose existence is ensured by Proposition 4.5.17, of sequence  in one point. In fact, denoted with
in one point. In fact, denoted with  such a pointwise limit, if the two limits
such a pointwise limit, if the two limits 
 , coincide, then
, coincide, then  for any x ∈ X and the strategy profile
for any x ∈ X and the strategy profile  is an SPNE of Γ in light of Theorem 4.5.18. Instead, if the two limits in (4.5.5) do not coincide, then
is an SPNE of Γ in light of Theorem 4.5.18. Instead, if the two limits in (4.5.5) do not coincide, then  and the strategy profile
and the strategy profile  could be not an SPNE of Γ, hence we need the follower’s strategy
could be not an SPNE of Γ, hence we need the follower’s strategy  as in statement of Theorem 4.5.18 in order to get an SPNE. Examples 2 and 3 in [22] illustrate the two cases described above: in the first one the two limits in (4.5.5) are equal, whereas, in the second one the two limits in (4.5.5) are different and the pair
as in statement of Theorem 4.5.18 in order to get an SPNE. Examples 2 and 3 in [22] illustrate the two cases described above: in the first one the two limits in (4.5.5) are equal, whereas, in the second one the two limits in (4.5.5) are different and the pair  comes out to be not an SPNE of the game. Such examples show also that, in general, the sequence
comes out to be not an SPNE of the game. Such examples show also that, in general, the sequence  is not continuously convergent to
is not continuously convergent to  .
.As regards to the connections with other methods for selecting SPNEs, the following example (examples 3, 5 and 6 in [22]) shows that the selection method based on proximal regularization presented in this subsection, the selection method relying on Tikhonov regularization described in Sect. 4.5.1.3 and the way of selecting via weak and strong Stackelberg solutions illustrated in Remark 4.3.5 do not generate, in general, the same SPNE.
- the SPNE selected via proximal regularization is
 , where
, where ![$$\displaystyle \begin{aligned} \widetilde\varphi^{\mathcal{P}}(x)=\begin{cases} 1, & \mbox{if } x \in\left[{1}/{2},1\right[ \\ -1, & \mbox{if } x\in[1,2]; \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equeg.png)
- the SPNE selected by using the Tikhonov regularization is
 , where
, where ![$$\displaystyle \begin{aligned} \widetilde\varphi^{\mathcal{T}}(x)=\begin{cases} 0, & \mbox{if } x\in[1/2,1[ \\ -1, & \mbox{if } x\in[1,2]; \end{cases} \end{aligned}$$](../images/480569_1_En_4_Chapter/480569_1_En_4_Chapter_TeX_Equeh.png)
there are no SPNEs induced by a weak Stackelberg solution, as problem (PB) has no solutions;
there exists one SPNE induced by the (unique) strong Stackelberg solution: the pair
 where
where  for any x ∈ [1∕2, 2].
for any x ∈ [1∕2, 2].
Finally, we mention that convergence results involving “costs of change” and proximal methods in Stackelberg games have been recently investigated in [37, Section 5].
4.6 Conclusion
In this chapter we considered two-stage Stackelberg games, the natural environment for different kinds of mathematical problems that can arise depending on the leader’s information about the optimal responses of the follower. We discussed crucial issues related to such problems and we provided two approaches for managing them. The first one consists in regularizing the follower’s optimal reaction set via the introduction of appropriate solution concepts which allowed to obviate both the lack of existence and stability of the weak Stackelberg (or pessimistic bilevel) problem and the lack of stability of the strong Stackelberg (or optimistic bilevel) problem. The second one consists in regularizing the follower’s payoff function by employing the Tikhonov and the proximal regularizations which enabled both to overcome the non-single-valuedness of the follower’s best reply correspondence and to select subgame perfect Nash equilibria.
We note that the issues and the approaches (for facing such issues) we focused in this chapter are not the unique ones. For instance, the question of sensitivity analysis for problems (PB) and (OB), has been recently investigated in [31, 32]. Moreover, beyond the two regularizing approaches examined in this chapter, one can construct classes of mixed regularization methods which exploit simultaneously both the idea of regularizing the follower’s optimal reaction set and of regularizing the follower’s payoff function; first approximation schemes of this type have been defined in [75, 78, 88].
Dynamic: players’ actions are functions depending on time. First results on dynamic Stackelberg games can be found in [10, 20, 24, 68, 105, 110], while applications to economic models are described in [11, 33].
Multiobjective: the follower has a vector-valued payoff function or solves vector (quasi-)variational inequalities. Methods for solving (optimistic) multiobjective bilevel optimization problems have been investigated in [35] (where scalarization techniques are used) and in [113] (where a model based on set-valued optimization is firstly proposed to manage strong Stackelberg problems and then extended to a multiobjective setting). Concerning results on approximate solutions which could be useful in the analysis of Stackelberg games with second stage described by vector problems, we remind [56, 65, 79, 92]. Furthermore, a penalty scheme has been introduced to approach (optimistic) semivectorial bilevel optimization problems in [18] and, in a dynamic framework, existence results have been first obtained for the (optimistic and pessimistic) semivectorial bilevel optimal control problems in [19].
Multileader: more than one leader acts in the first stage. For general multi-leader-follower games see, for example, [42, 98]. The situation where each follower can observe the action of one leader has been investigated in [97] for an economic model and in [23] for deriving a selection result. An increasing literature is also devoted to the class of multi-leader-common-follower games and to its applications to electricity markets, see for example [8, 9].