A series of advances in the 1920s led to the introduction of the quartz oscillator to replace the mechanisms of traditional chronometers.1 Pendulum clocks typically had one beat every two seconds. Traditional mechanical chronometers used so-called “escapement” wheels that oscillated at two to five beats per second. Quartz oscillators operated in the kilohertz range: thousands of beats per second. When properly calibrated, they offered orders-of-magnitude increases of accuracy.2 It had been long known that supplying energy to a quartz crystal caused it to oscillate at a frequency determined mainly by the crystal’s thickness. Other factors caused the frequency to drift, including variations in temperature, contamination of the crystal, and mechanical shock. One by one, these problems were addressed. By the late 1930s, the US National Bureau of Standards (in 1988 renamed the National Institute of Standards and Technology) was providing time services to the nation with quartz clocks that neither gained nor lost 0.004 seconds a day.3
Radio
Concurrent with the introduction of quartz oscillators was the development of radio, or the “wireless.” Just as the Morse telegraph coevolved with the US railroad network in the nineteenth century, so too did the growth of aviation coevolve with radio. Radio’s first impact on navigation was to provide accurate time, supplied by ground-based quartz oscillators, to supplement the onboard equipment used by navigators. Radio also provided homing or direction-finding navigation signals.
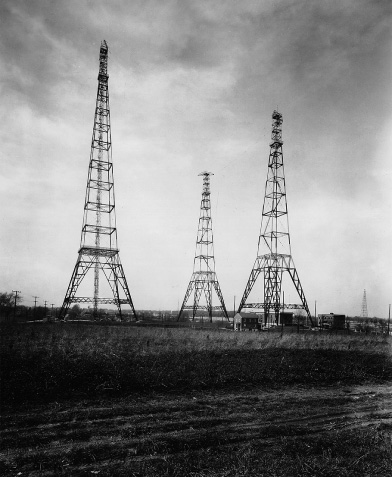
From as early as 1913, the US Navy, operating from the Naval Observatory in Washington, DC, provided time signals to the nation by telegraph. In that year the Navy began experiments to broadcast time signals from towers located in nearby Arlington, Virginia (see figure 4).
Figure 4 Transmitting towers of radio station NAA, Arlington, Virginia, erected in 1913. Operated by the Navy in the longwave band, the towers were among the tallest manmade structures in the world. Amateur radio operators have stated that the descriptions of this station were the first to use the term “radio” in place of “wireless.” The station established the precedent of transmitting accurate time over radio, a practice later taken over by the National Bureau of Standards. (Source: US Navy)
The Navy became the de facto timekeeper for the United States, but the National Bureau of Standards also took on responsibility for accurate timekeeping. In 1920, the bureau established a radio station, WWV, in Washington, DC, and after experimenting with several types of programming, settled on the broadcast of the time of day and other related information around the clock. In 1931, WWV moved to a site in College Park, and later to nearby Greenbelt, Maryland. Since 1966 the station’s transmitters have been located in Fort Collins, Colorado, where they continue to broadcast time on frequencies in the high-frequency bands (2.5–20 MHz).4
An aircraft or ship within range of these stations could obtain Greenwich Mean Time and use that to calibrate the onboard chronometers. Transmission of signals on the high-frequency bands allowed reception over long distances due to the reflection of the signals by the ionosphere. At the same time, however, these reflections introduced variable time delays, which the navigator had to account for. Users of modern satellite positioning systems also have to account for ionospheric effects, although not for the same reason. Satellite positioning systems transmit signals at much higher frequencies that pass through, but are not reflected by, the ionosphere. The passage does introduce delays, for which GPS and other satellite positioning systems make corrections.
A second, unrelated use of radio for navigation was to employ it as an extension of the classic aid to navigation used by seafarers for centuries: the lighthouse. A radio station broadcasting from a fixed location could serve as a beacon to aircraft and ships within its range. Aircraft flying over land could tune in to commercial broadcast stations on the AM band. By using a loop antenna and rotating it until the signal was weak, or nulled, the loop’s position would indicate the direction of the transmitter from the aircraft. The US government formalized this technique by building a network of stations installed near airports in the 1930s and 1940s. These transmitters went a step further from simple beacons: they broadcast signals in the four quadrants of the compass. On one side of a direct heading to the station, the pilot heard the Morse code signal for “A”: dot-dash. On the other side, the signal for “N”: dash-dot. When the aircraft was “on the beam,” the pilot heard a continuous tone: the merging of the two codes. That did not tell the crew whether they were approaching or receding from the airport, but one could use other techniques, or other transmissions, to resolve that.
A classic image of a lighthouse is of a bright beam sweeping across the sky. After World War II, the four-course stations described above were replaced by radio-based versions of the lighthouse. Called the “Very-High-Frequency Omnidirectional Range,” or VOR, these radio transmitters broadcasted signals that swept across the sky. An aircraft receiving the signal could determine its location by the timing of the received signal. VOR stations were established as waypoints along the major air routes in the United States and elsewhere, forming established highways in the sky (see figure 5). These highways consisted of straight-line segments from one waypoint to another, resulting in a journey that is longer than a direct, point-to-point course, but VOR had the advantages of reliability, robustness, and reasonably low cost. It was further augmented by a system that told the pilot the aircraft’s distance from the transmitter. This “distance-measuring equipment” required a transmission from the aircraft to the ground station. Commercial and private pilots were comfortable using this combination, and it has proven itself over decades of daily use. Its replacement by satellite-based navigation systems is currently underway. Because it operates in very high frequencies, VOR’s range is limited to line-of-sight—no more than about 300 km.
Figure 5 VOR installation, Table Rock, Oregon. (Source: Wikimedia Commons)
LORAN, Omega
Radio systems like VOR worked well over land, with frequent stations along well-traveled routes. Across the oceans was another matter. In the mid-twentieth century, three techniques emerged to address that gap: inertial navigation, Omega, and LORAN. Omega and LORAN were both radio-based; inertial navigation operates on a different principle. Inertial navigation remains in use today, Omega has been shut down, and LORAN is no longer used in the United States. All three had an indirect but significant role in the development of satellite-based systems.
LORAN—short for long-range navigation—was a ground-based radio system that had its origins in World War II. It was similar to several British radio-navigation systems, although it had a greater scope. The Tizard Mission, in the summer of 1940, brought a device called the “cavity magnetron” from the United Kingdom to the United States. This top-secret electron tube allowed radar transmitters to operate at high power at short wavelengths and made radar practical. The Tizard Mission also brought details of a system known as Gee, a radio navigation system that helped guide British pilots back to home bases, regardless of weather, after bombing runs over Continental Europe. Gee used radio frequencies that had a more limited range, but they were adequate for use in the comparatively small area of northern and central Europe.
The American adaptation of these technologies became LORAN. An American banker, Alfred Loomis, supported the adaptation at his private research laboratory on his Tuxedo Park estate north of New York City. This research later moved to the Massachusetts Institute of Technology’s Radiation Laboratory.5 LORAN operated on the principle of having pairs of radio transmitters located along coastlines, each broadcasting signals synchronized by quartz oscillators. A ship or aircraft would receive these signals, and the navigator would note the time difference between the reception of each. That difference placed the craft along a hyperbola, defined as a line of constant difference between two points. By repeating this process using another pair of transmitters, the ship’s or aircraft’s location could be determined by consulting charts overlaid with hyperbolas related to the stations. LORAN required training and exotic equipment onboard, custom maps with hyperbolas printed on them, and constant staffing of transmitting stations in remote locations (see figure 6). The need for such advanced training gave the United States confidence that the enemy would not be able to take advantage of it, even though its signals were easy to detect.
Figure 6 LORAN required continuously staffed transmitting stations, often in remote coastal locations, such as this station in Adak, Alaska, established during the Second World War. (Source: National Archives and Records Administration 80-G 211852)
LORAN worked in any weather and did not require any transmission from the user that could give away position.6 Satellite positioning systems like GPS retain LORAN’s fundamental concepts of transmitting synchronized time signals from widely separated transmitters, and of not requiring any transmission from user equipment. LORAN could not have worked without precise, quartz-based frequency standards and a means to synchronize them among the various stations. LORAN initially operated at 30 MHz, then lowered to around 2 MHz, just above the AM broadcast radio band. The 2 MHz frequency allowed for skywave transmission, in which the ionosphere bent the signal and greatly extended its range beyond line-of-sight. That came at a cost of reduced accuracy, as the reflected signals could vary based on the conditions of the ionosphere. LORAN was designed and used to great advantage over the Atlantic and Pacific as the United States waged a war on two fronts.
By 1945, LORAN stations provided coverage over the great circle routes of the north Atlantic and north Pacific. In the 1960s, the United States built stations in southeast Asia to assist forces in the Vietnam conflict. LORAN-C, the post-war improvement to the World War II system, operated at 100 kHz, hence a longer wavelength. It was further improved, and the United States made it available to commercial shipping and aircraft as well. By the 1960s, its cumbersome charts, with their mazes of hyperbolic lines, were replaced by solid-state electronic receivers that directly gave the navigators latitude and longitude. The New England fishing boats chronicled in the best-selling book and movie The Perfect Storm, for example, were equipped with compact, capable LORAN receivers.7 LORAN-C was decommissioned in 2010, when it was replaced by GPS.
Omega
Omega, the second radio-based long-range navigation system, had a short life. Work on it began in the late 1960s and achieved an initial operational capability in 1971, at a time when satellite technology was advancing rapidly. Mainly for that reason, it did not last long, and Omega ceased operations by 1977. In some respects it was an extension of LORAN: widely spaced transmitters sent synchronized signals to receivers on ships and aircraft, whose position was determined by comparison of the signals sent from different sources. The system operated in the part of the spectrum known as very low frequency, far below the 100 kHz band used by LORAN. Omega transmitted signals from eight high-powered transmitters, feeding signals into tall towers widely spaced across the globe. Like LORAN, it could provide a position in only two dimensions, with no better than two kilometers accuracy. The US Navy, which designed and built the system, found that useful for navigating across the open seas. Despite its global coverage, Omega’s modest accuracy, plus the need to establish and maintain expensive transmitters and tall antennas in remote areas of the globe not all under US control, led to its demise. Omega’s low frequencies (10–14 kHz) had very long wavelengths (up to 30 kilometers). At those wavelengths, the signals were not so much reflected by the ionosphere as guided, with the Earth acting as one side of a waveguide and the ionosphere as the other. The timing of transmissions was thus more consistent. Those eight stations provided continuous, global coverage—the first radio navigation system to have that property. Global coverage is another defining attribute of GPS. Like GPS, Omega was passive: the receiving aircraft or ship did not need to transmit any signal and thus give away its position.
Inertial Navigation
Inertial navigation systems emerged from the development of the German V-2 ballistic missile and were refined to a high degree of sophistication in the Cold War years by the United States and the USSR. Although inertial navigation operated on a fundamentally different principle from the systems described thus far, its central role in Cold War military strategy and policy ties it closely to satellite navigation.
During the early development of the V-2, German engineers at Peenemünde incorporated gyroscopes and accelerometers to stabilize the rocket as it ascended from the launch pad. Onboard gyroscopes and accelerometers controlled flight attitude: pitch, roll, and yaw.8 Once the rocket achieved the desired velocity, its engine was cut off and the missile traveled, unpowered, to its target. This point of cut-off—in German, Brennschluss—was crucial to the accuracy of the weapon and to all the ballistic missiles that are the V-2’s descendants. Early V-2s used a radio beam to control drift and determine the point of cut-off; later rockets used internal gyros, which were impervious to jamming or outside interference. But the V-2 never achieved the accuracy necessary to make it an effective weapon. After World War II, the United States and Soviet Union both mounted an intensive effort to improve the accuracy of these systems, called “inertial” because they relied on an application of Newton’s laws relating to acceleration, velocity, and position.9 Charles Stark Draper, a professor at MIT’s Instrumentation Laboratory, was especially influential in driving the accuracy of these systems to a degree thought impractical in the immediate postwar years. Draper and his students not only provided inertial guidance systems for ballistic missiles, but the Instrumentation Laboratory also designed the inertial guidance system for the Apollo spacecraft, which carried astronauts to the moon between 1968 and 1972.
Inertial navigation’s ability to determine velocity without interaction with the outside world made it desirable for ballistic missiles, whose trajectory could not be jammed by an enemy, and for nuclear-powered submarines, which went to great lengths to hide their location under the sea. Practical inertial navigation for these applications was expensive, but that ability made the cost worthwhile.
Beginning in the mid-1960s, suppliers developed inertial systems at much lower cost, with a relaxation of accuracy. Most of these were a response to the difficulties and high manual skills required to manufacture precision gyroscopes based on a spinning mass. The new designs were also in response to a perception that inertial guidance and navigation, with the proper balance of cost versus accuracy, could find a wide market beyond missile and submarine systems. Engineers explored alternatives to the spinning mass of a classic gyroscope.10 One was to circulate a laser beam on a triangular path using mirrors, rather than using a rotating mass. Another circulated a beam of light along a ring of fiber-optic cable. One mechanical system, the “hemispherical resonant gyro,“ used a cup-shaped piece of material that did not rotate but vibrated at a specific frequency, just as a wine glass hums at a specific tone when someone rubs a wet finger across it. A pick-off circuit measured the change in the phase of the vibration as the device accelerated. Decades later, micro-miniature gyroscopes and accelerometers were developed that could be fitted into such products as smartphones and “smart” military weapons. These MEMS (microelectromechanical systems) will be discussed in detail later, as they became tightly integrated with GPS chips and other positioning devices in both civil and military devices.
In the 1960s, Delco, a division of General Motors, developed an inertial system for commercial aircraft flying transcontinental routes in areas without ground-based radio coverage. It used classic mechanical gyroscopes derived from Charles Stark Draper’s research at MIT. To compensate for errors that might accumulate in the accelerometers, the platform rotated slowly. Delco called the unit a “Carousel” system. It was reliable and accurate enough to navigate the aircraft to a point where it could receive radio navigation signals as it approached landfall. Pan Am and other airlines installed carousels on Boeing 747s for flights across the Atlantic and Pacific oceans. Each aircraft carried three units, for redundancy. In an inaugural flight in October 1969, Finnair flew a commercial airliner from Finland to New York with the Carousel navigating in place of a human navigator onboard. At its arrival in the vicinity of New York, the three units had drifted, but the errors were well within the range of ground-based VOR units installed in the New York vicinity, which then guided the aircraft to the runway. Carousels became standard equipment on 747s and other commercial (and a few military) aircraft and worked well, with increasing accuracy and, as Delco pointed out, no need to tax the ground controllers along the way (if there were any within range).11 The system’s fundamental principle of operation has little to do with GPS or other satellite-based navigation, but it must be included in any discussion of GPS for at least two reasons. One is technical: modern positioning and navigation systems, especially those used by the military, incorporate both inertial and satellite techniques. The other is historical: in 1983, a Korean Air Lines passenger plane navigating with a Carousel was downed by a Soviet jet. That tragedy, which will be discussed later, had a dramatic effect on the adoption of GPS.12