Changing gears from linear motion to rotational motion
Calculating tangential speed and acceleration
Understanding angular acceleration and velocity
Identifying the torque involved in rotational motion
Maintaining rotational equilibrium
This chapter is the first of two on handling objects that rotate, from space stations to marbles. Rotation is what makes the world go round — literally — and if you know how to handle linear motion and Newton’s laws (see the first two parts of the book if you don’t), the rotational equivalents we present in this chapter and in Chapter 12 are pieces of cake. And if you don’t have a grasp on linear motion, no worries. You can get a firm grip on the basics of rotation here. You see all kinds of rotational ideas in this chapter: angular acceleration, tangential speed and acceleration, torque, and more. Kinetics deals not only with the motions of objects but also the forces behind those motions. Rotational kinetics deals with rotational motions and the forces behind them (torque). But enough spinning the wheels. Read on!
Going from Linear to Rotational Motion
You need to change equations when you go from linear motion to rotational motion. Here are the angular equivalents (or analogs) for the linear motion equations:
Linear
Angular
Velocity
Acceleration
Displacement
Motion with time canceled out
In all these equations, t stands for time, means “change in,” f means final, and i means initial. In the linear equations, v is velocity, s is displacement, and a is acceleration. In the angular equations, is angular velocity (measured in radians per second), is angular displacement in radians, and is angular acceleration (in radians per second2).
You know that the quantities displacement, velocity, and acceleration are all vectors; well, their angular equivalents are vectors, too. First, consider angular displacement, — this is a measure of the angle through which an object has rotated. The magnitude tells you the size of the angle of the rotation, and the direction is parallel to the axis of the rotation. Similarly, angular velocity, , has a magnitude equal to the angular speed and a direction that defines the axis of rotation. The angular acceleration, , has a magnitude equal to the rate at which the angular velocity is changing; it’s also directed along the axis of rotation.
If you consider only motion in a plane, then you have only one possible direction for the axis of rotation: perpendicular to the plane. In this case, these vector quantities have only one component — this vector component is just a number, and the sign of the number indicates all you need to know about the direction. For example, a positive angular displacement may be a clockwise rotation, and a negative angular displacement may be a counterclockwise rotation.
Just as the magnitude of the velocity is the speed, the magnitude of the angular velocity is the angular speed. Just as the magnitude of a displacement is a distance, the magnitude of an angular displacement is an angle — that is, the magnitude of the vector quantity is a scalar quantity.
Note: In the next section, we begin by looking at the motion in a plane considering only the single component of the vectors — which are scalar numbers (we identify the vector with its single component). So for that section, the quantities, , , and don’t appear in bold type because they represent the single component of a rotation in a plane. In the section “Applying Vectors to Rotation,” we take a closer look at the vector nature of the angular displacement, velocity, and acceleration.
Understanding Tangential Motion
Tangential motion is motion that’s perpendicular to radial motion, or motion along a radius. Given a central point, vectors in the surrounding space can be broken into two components: radial direction, which points directly away from the center of the circle, and tangential direction, which follows the circle and is directed perpendicular to the radial direction. Motion in the tangential direction is referred to as tangential motion.
Tip: You can tie angular quantities such as angular displacement , angular velocity , and angular acceleration to their associated tangential quantities. All you have to do is multiply by the radius, using these equations:
Warning: These equations rely on using radians as the measure of angles; they don’t work if you try to use degrees.
Say you’re riding a motorcycle, for example, and the wheels’ angular speed is radians per second. What does this mean in terms of your motorcycle’s speed? To determine your motorcycle’s velocity, you need to relate angular velocity, , to linear velocity, v. The following sections explain how you can make such relations.
Finding tangential velocity
At any point on a circle, you can pick two special directions: The direction that points directly away from the center of the circle (along the radius) is called the radial direction, and the direction that’s perpendicular to this is called the tangential direction.
When an object moves in a circle, you can think of its instantaneous velocity (the velocity at a given point in time) at any particular point on the circle as an arrow drawn from that point and directed in the tangential direction. For this reason, this velocity is called the tangential velocity. The magnitude of the tangential velocity is the tangential speed, which is simply the speed of an object moving in a circle.
Remember: Given an angular velocity of magnitude , the tangential velocity at any radius is of magnitude . The idea that the tangential velocity increases as the radius increases makes sense, because given a rotating wheel, you’d expect a point at radius r to be going faster than a point closer to the hub of the wheel.
Take a look at Figure 11-1, which shows a ball tied to a string. The ball is whipping around with angular velocity of magnitude .
Figure 11-1: A ball in circular motion has angular speed with respect to the radius of the circle.
Tip: You can easily find the magnitude of the ball’s velocity, v, if you measure the angles in radians. A circle has radians; the complete distance around a circle — its circumference — is , where r is the circle’s radius. In general, therefore, you can connect an angle measured in radians with the distance you cover along the circle, s, like this:
where r is the radius of the circle. Now, you can say that , where v is magnitude of the velocity, s is the distance, and t is time. You can substitute for s to get
Because , you can say that
In other words,
Example
Q. The wheels of a motorcycle are turning with an angular velocity of radians per second What is the motorcycle’s speed if the radius of one of the motorcycle’s wheels is 40 centimeters?
A. The correct answer is 27 meters per second.
Use the equation v = rω.
Plug in the numbers:
Practice Questions
1. If a satellite is orbiting Earth, which has an average radius of 3,960 miles, at an altitude of 150 miles and an angular speed of 1.17 × 10–3 radians per second, what is the satellite’s tangential speed in miles per hour?
2. You’re flying a toy plane on a string, and it’s going around at 20.0 miles per hour, 100.0 feet from you. What is its angular speed in radians per second?
Practice Answers
1.17,300 mph. Use the equation v = rω.
Convert 1.17 × 10–3 radians per second into radians per hour:
The radius at which the satellite orbits is 150 miles added to the radius of Earth, which is about 3,960 miles, making that radius 4,110 miles. That makes the satellite’s tangential speed
2.0.29 radians/s. Use the equation v = rω.
Solve for ω:
Convert 20.0 miles per hour to feet per hour:
Convert from feet per hour to feet per second:
Solve for ω:
Finding tangential acceleration
Tangential acceleration is a measure of how the tangential velocity of a point at a certain radius changes with time. Tangential acceleration is just like linear acceleration (see Chapter 3), but it’s particular to the tangential direction, which is relevant to circular motion. Here, you look at the magnitude of the angular acceleration, , which tells you how the speed of the object in the tangential direction is changing.
For example, when you start a lawn mower, a point on the tip of one of its blades starts at a tangential velocity of zero and ends up with a tangential velocity with a pretty large magnitude. So how do you determine the point’s tangential acceleration? You can use the following equation from Chapter 3, which relates velocity to acceleration (where is the change in velocity and is the change in time) to relate tangential quantities like tangential velocity to angular quantities such as angular velocity:
Tangential velocity, v, equals (as you see in the preceding section), so you can plug in this information:
Because the radius is constant here, the equation becomes
However, , the angular acceleration, so the equation becomes
Translated into layman’s terms, this says tangential acceleration equals angular acceleration multiplied by the radius.
Example
Q. A set of helicopter blades has a radius of 4.3 meters. If a point on the tip of one blade starts at 0 meters per second and ends up 60 seconds later with a speed of 400 meters per second, what was the angular acceleration?
A. The correct answer is 1.6 radians per second2.
Use this equation:
Plug in the numbers:
Divide both sides by r:
Do the math:
Practice Questions
1. If a point on the edge of a tire with a radius of 0.50 meters starts at rest and ends up 3.5 minutes later at 88 meters per second (about 197 miles per hour), what was the magnitude of its average angular acceleration?
2. You’re flying a toy plane on a string, and it’s going around at 20.0 meters per second, 10.0 meters from you. If it accelerates to a final velocity of 30.0 meters per second in 80.0 seconds, what is its angular acceleration?
Practice Answers
1.0.84 radians/s2. Use this equation:
Plug in the numbers:
Divide both sides by r:
Do the math:
2.1.25 × 10–2 radians/s2. Use this equation:
Plug in the numbers:
Divide both sides by r:
Do the math:
Finding centripetal acceleration
Newton’s first law says that when there are no net forces, an object in motion will continue to move uniformly in a straight line (see Chapter 5). For an object to move in a circle, a force has to cause the change in direction — this force is called the centripetal force. Centripetal force is always directed toward the center of the circle.
The centripetal acceleration is proportional to the centripetal force (obeying Newton’s second law; see Chapter 5). This is the component of the object’s acceleration in the radial direction (directed toward the center of the circle), and it’s the rate of change in the object’s velocity that keeps the object moving in a circle; this force doesn’t change the magnitude of the velocity, only the direction.
You can connect angular quantities, such as angular velocity, to centripetal acceleration. Centripetal acceleration is given by the following equation (for more on the equation, see Chapter 7):
where v is the velocity and r is the radius. Linear velocity is easy enough to tie to angular velocity because (see the earlier section “Finding tangential velocity”). Therefore, you can rewrite the acceleration formula as
Remember: The centripetal-acceleration equation simplifies to
Nothing to it. The equation for centripetal acceleration means that you can find the centripetal acceleration needed to keep an object moving in a circle given the circle’s radius and the object’s angular velocity.
Example
Q. What is the centripetal acceleration of the moon around the Earth? The average radius of the moon’s orbit is meters, and the moon orbits the Earth about once every 28 days.
A. The correct answer is .
Start with the new equation:
Because the moon makes a complete orbit around the Earth in about 28 days, it travels 2π radians around the Earth in that period, so its angular velocity is
Convert 28 days to seconds:
Find the angular velocity:
Plug the numbers into the centripetal-acceleration formula:
Practice Questions
1. An ant hitches a ride on the second hand of a clock, 7.4 centimeters away from the center of the clock. What is the centripetal acceleration of the ant?
2. What is the gravitational force that the sun exerts on the Earth? The mass of the Earth is kilograms, and the distance between the Earth and the sun is about 150,000,000 kilometers.
Practice Answers
1.m/s2. Use the centripetal-acceleration equation:
Plug in the numbers:
2.N. Convert 1 year to seconds:
Use Newton’s second law with the centripetal-acceleration equation:
Plug in the numbers:
Applying Vectors to Rotation
Angular displacement, angular velocity, and angular acceleration are each vector quantities. When you consider circular motion in a plane, these vectors have only one component, which is a scalar number; in that case, you don’t have to consider the direction very much. However, when you have circular motion in more than one plane (as with the motions of the planets, which orbit on very slightly different planes) or when the plane of rotation changes (like in a wobbling spinning top, for example), then the direction of these vectors becomes significant.
Remember: Angular velocity and angular acceleration are vectors that are directed along the axis of the rotation.
In this section, you hear more about the directions of the angular vectors. For the rest of this section, the quantities ,, and appear in bold type because you’re explicitly dealing with vectors.
Calculating angular velocity
When a wheel is spinning, it has not only an angular speed but also a direction. Here’s what the angular velocity vector tells you:
The size of the angular velocity vector tells you the angular speed.
The direction of the vector tells you the axis of the rotation as well as whether the rotation is clockwise or counterclockwise.
Say that a wheel has a constant angular speed, ; which direction does its angular velocity, , point? It can’t point along the rim of the wheel, as tangential velocity does, because its direction would then change every second. In fact, the only real choice for its direction is perpendicular to the wheel.
The direction of the angular velocity always takes people by surprise: Angular velocity, , points along the axle of a wheel (see Figure 11-2). Because the angular velocity vector points the way it does, it has no component along the wheel. The wheel is spinning, so the tangential (linear) velocity at any point on the wheel is constantly changing direction — except for at the very center point of the wheel, where the base of the angular velocity vector sits. If the wheel is lying flat on the ground, the vector’s head points up or down, away from the wheel, depending on which direction the wheel is rotating.
Figure 11-2: Angular velocity points in a direction perpendicular to the wheel.
Tip: You can use the right-hand rule to determine the direction of the angular velocity vector. Wrap your right hand around the wheel so that your fingers point in the direction of the tangential motion at any point — the fingers on your right hand should go in the same direction as the wheel’s rotation. When you wrap your right hand around the wheel, your thumb points in the direction of the angular velocity vector, .
Figure 11-2 shows a wheel lying flat, turning counterclockwise when viewed from above. Wrap your fingers in the direction of rotation. Your thumb, which represents the angular velocity vector, points up; it runs along the wheel’s axle. If the wheel were to turn clockwise instead, your thumb — and the vector — would have to point down, in the opposite direction.
Example
Q. A helicopter’s blades are rotating in a horizontal plane, and they’re going counterclockwise when viewed from above. Which way does ω point?
A. The correct answer is upward.
Curl your right hand in the direction of rotational motion — counterclockwise.
Your right thumb points upward, indicating the direction of the ω vector.
Practice Questions
1. Suppose that you’re flying a toy plane on a string, and it’s going around clockwise as viewed from above. Which way does ω point?
2. Suppose that you’re driving forward. Which way does ω point for the left front tire?
Practice Answers
1.Downward. Curl your right hand in the direction of rotational motion — clockwise. Your right thumb points downward, indicating the direction of the ω vector.
2.To the left. Curl your right hand in the direction of rotational motion. Your right thumb points to the left, indicating the direction of the ω vector.
Figuring angular acceleration
In this section, you find out how the angular acceleration and angular velocity relate to each other in terms of their magnitude and direction. You first see what happens in the simplest case, where the angular acceleration and velocity are in the same direction or in opposite directions. Then you look at a situation in which angular acceleration and angular velocity are at an angle to each other, leading to a tilting of the rotational axis.
Changing the speed and reversing direction
If the angular velocity vector points out of the plane of rotation (see the preceding section), what happens when the angular velocity changes — when the wheel speeds up or slows down? A change in velocity signifies the presence of angular acceleration. Like angular velocity, , angular acceleration, , is a vector, meaning it has a magnitude and a direction. Angular acceleration is the rate of change of angular velocity:
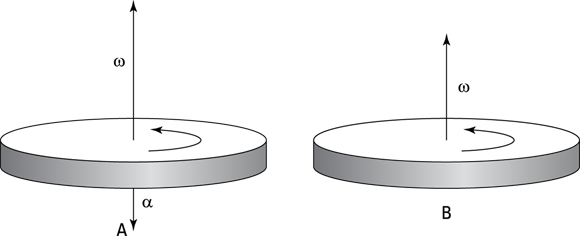
For example, look at Figure 11-3, which shows what happens when angular acceleration affects angular velocity. In this case, points in the same direction as in Figure 11-3a. When the angular acceleration vector, , points along the angular velocity, , the magnitude of will increase as time goes on, as Figure 11-3b shows.
Figure 11-3: Angular acceleration in the same direction as the angular velocity.
Remember: Just as an object’s linear velocity and linear acceleration may be in opposite directions, the angular acceleration also doesn’t have to be in the same direction as the angular velocity vector (as Figure 11-4a shows). If the angular acceleration is directed in the opposite direction of the angular velocity, then the magnitude of the angular velocity decreases at a rate given by the magnitude of the angular acceleration.
Figure 11-4: Angular acceleration in the direction opposite the angular velocity reduces the angular speed.
Just as in the case of linear velocity and acceleration, the angular acceleration gives the rate of change of angular velocity: The magnitude of the angular acceleration gives the rate at which the angular velocity changes, and the direction gives the direction of the change. You can see a decreased angular velocity in Figure 11-4b.
Tilting the axle
The angular acceleration is the rate of change of angular velocity — the change can be to the direction instead of the magnitude. For example, suppose you take hold of the axle of the spinning wheel in Figure 11-3 and tilt it. You’d change the angular velocity of the wheel but not by changing its magnitude (the angular speed of the wheel would remain constant); rather, you’d change the direction of the angular velocity by changing the axis of rotation — this is an angular acceleration that’s directed perpendicular to the angular velocity, as in Figure 11-5.
Figure 11-5: Angular acceleration perpendicular to the angular velocity tilts the axis of rotation.
Example
Q. A helicopter’s blades are rotating in a horizontal plane, and they’re going counterclockwise when viewed from above. As they slow down, which way does α point?
A. The correct answer is downward.
Curl your right hand in the direction of rotational motion — counterclockwise.
Your right thumb points upward, indicating the direction of the ω vector.
The ω vector is decreasing in magnitude with time while staying in the same direction, which means α points in the opposite direction — downward.
Practice Questions
1. Suppose that you’re flying a toy plane on a string, and it’s going around clockwise as viewed from above. In time, the plane is slowing down. Which way does α point?
2. A flying disc tossed from one player to another spins as it flies and slows down. If it’s spinning counterclockwise when viewed from above, which way does α point?
Practice Answers
1.Upward. Curl your right hand in the direction of rotational motion. Your right thumb points downward, indicating the direction of the ω vector. In time, the rotation is slowing, so the ω vector must be decreasing in magnitude. That means α points in the opposite direction — upward.
2.Downward. Curl your right hand in the direction of rotational motion. Your right thumb points upward, indicating the direction of the ω vector. In time, the rotation is slowing, so the ω vector must be decreasing in magnitude. That means α points in the opposite direction — downward.
Doing the Twist: Torque
For extended objects (rods, disks, or cubes, for example), which, unlike point objects, have their mass distributed through space, you have to take into account where the force is applied. Enter torque. Torque is a measure of the ability of a force to cause rotation. In physics terms, the torque exerted on an object depends on the force itself (its magnitude and direction) and where you exert the force. You go from the strictly linear idea of force as something that acts in a straight line (such as when you push a refrigerator up a ramp) to its angular counterpart, torque.
Tip: Just as force causes acceleration, torque causes angular acceleration, so you can think of torque as the angular equivalent of force (see Chapter 12 for more info on that aspect of torque).
Torque brings forces into the rotational world. Most objects aren’t just points or rigid masses, so if you push them, they not only move but also turn. For example, if you apply a force tangentially to a merry-go-round, you don’t move the merry-go-round away from its current location — you cause it to start spinning. Rotational motions and the forces behind them are the focus of this chapter and Chapter 12.
Look at Figure 11-6, which shows a seesaw with a mass m on it. If you want to balance the seesaw, you can’t have a larger mass, M, placed on a similar spot on the other side of the seesaw. Where you put the larger mass M determines whether the seesaw balances. As you can see in Figure 11-6a, if you put the mass M on the pivot point — also called the fulcrum — of the seesaw, you don’t have balance. The larger mass exerts a force on the seesaw, but the force doesn’t balance it.
Figure 11-6: A seesaw demonstrates torque in action.
As you can see in Figure 11-6b, as you increase the distance you put the mass M away from the fulcrum, the balance improves. In fact, if , you need to put the mass M exactly half as far from the fulcrum as the mass m is.
The torque is a vector. The magnitude of the torque tells you the ability of the torque to generate rotation; more specifically, the magnitude of the torque is proportional to the angular acceleration it generates. The direction of the torque is along the axis of this angular acceleration. This section starts by considering torques and forces that are in a plane, so you only need to think about the magnitude of the torque and not the full vector. Later, we explain a little more about the direction of the torque vector.
Mapping out the torque equation
Remember: How much torque you exert on an object depends on the following:
The force you exert, F.
Where you apply the force; the lever arm — also called the moment arm — is the perpendicular distance from the pivot point to the point at which you exert your force and is related to the distance from the axis, r, by , where is the angle between the force and a line from the axis to the point where the force is applied.
Assume that you’re trying to open a door, as in the various scenarios in Figure 11-7. You know that if you push on the hinge, as in Figure 11-7a, the door won’t open; if you push the middle of the door, as in Figure 11-7b, the door will open; but if you push the edge of the door, as in Figure 11-7c, the door will open more easily.
Figure 11-7: The torque you exert on a door depends on where you push it.
In Figure 11-7, the lever arm, l, is distance r from the hinge at which you exert your force. The torque is the product of the magnitude of the force multiplied by the lever arm. It has a special symbol, the Greek letter (tau):
The units of torque are force units multiplied by distance units, which is newton-meters in the MKS system and foot-pounds in the foot-pound-second system (see Chapter 2 for more on these measurement systems).
For example, the lever arm in Figure 11-7 is distance r (because this is the distance perpendicular to the force), so . If you push with a force of 200 newtons and r is 0.5 meters, what’s the torque you see in the figure? In Figure 11-7a, you push on the hinge, so your distance from the pivot point is 0, which means the lever arm is 0. Therefore, the magnitude of the torque is 0. In Figure 11-7b, you exert the 200 newtons of force at a distance of 0.5 meters perpendicular to the hinge, so
The magnitude of the torque here is 100 newton-meters. But now take a look at Figure 11-7c. You push with 200 newtons of force at a distance of 2r perpendicular to the hinge, which makes the lever arm 2r or 1.0 meter, so you get this torque:
Now you have 200 newton-meters of torque, because you push at a point twice as far away from the pivot point. In other words, you double the magnitude of your torque. But what would happen if, say, the door were partially open when you exerted your force? Well, you would calculate the torque easily, if you have lever-arm mastery.
Understanding lever arms
If you push a partially open door in the same direction as you push a closed door, you create a different torque because of the non-right angle between your force and the door.
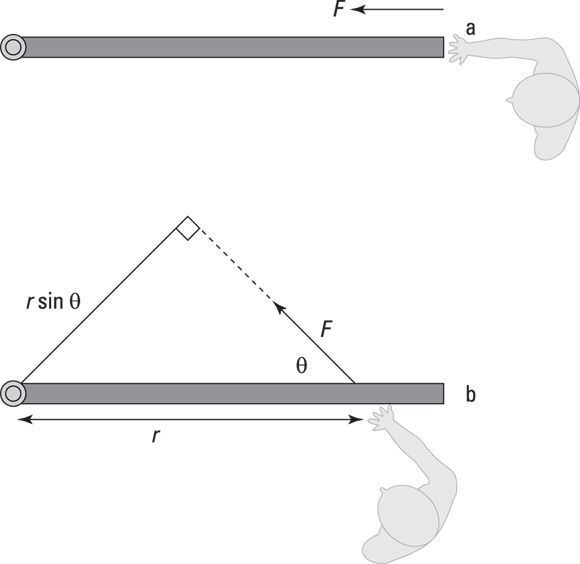
Take a look at Figure 11-8a to see a person obstinately trying to open a door by pushing along the door toward the hinge. You know this method won’t produce any turning motion, because the person’s force has no lever arm to produce the needed turning force. In this case, the lever arm is 0, so it’s clear that even if you apply a force at a given distance away from a pivot point, you don’t always produce a torque. The direction you apply the force also counts, as you know from your door-opening expertise.
Figure 11-8: You produce a useful angle of a lever arm by exerting force in the proper direction.
Figuring out the torque generated
If you apply a force F at a displacement r from a pivot point where the angle between that displacement and F is θ, the torque you produce is
Only the component of the distance perpendicular to the force contributes to the torque, which gives you the factor of r sin θ in the torque formula. (Alternatively, you can think of the sin θ as picking out the component of the force perpendicular to the distance.)
Example
Q. You push a merry-go-round at its edge, perpendicular to the radius. If the merry-go-round has a diameter of 3.0 meters and you push with a force of 200 newtons, what torque are you applying?
A. The correct answer is 300 newton-meters.
Use the equation τ = rF sin θ.
Plug in the numbers:
Practice Questions
1. You’re opening a door by pushing on its outer edge with a force of 100.0 newtons. If the door is 1.3 meters wide, what torque are you applying if you push perpendicular to the door?
2. The hot water tap in your shower is stuck. In anger, you apply 200.0 newtons of force to the outer edge of the handle, which has a turning radius of 10.0 centimeters. What torque are you applying?
3. You’re shoveling snow, holding the shovel handle in your right hand. Your left hand is placed halfway down the shovel’s shaft and is providing the lifting motion. If you apply 200.0 newtons of force at an angle of 78° to the shovel and the shovel is 1.5 meters long, how much torque are you applying?
4. You apply force on a wrench to loosen a pipe. If the wrench is 25 centimeters long and you apply 150 newtons at an angle of 67° with respect to the wrench, what torque are you applying?
Practice Answers
1.130 N ∙ m. Use the equation τ= rF sin θ.
Plug in the numbers:
2.20 N ∙ m. Use the equation τ= rF sin θ.
Plug in the numbers:
3.150 N ∙ m. Use the equation τ = rF sin θ.
Plug in the numbers:
which rounds to 150 newton-meters with significant digits.
4.35 N ∙ m. Use the equation τ = rF sin θ.
Plug in the numbers:
Recognizing that torque is a vector
Remember: Torque is a vector, so it has not only magnitude but also direction. The direction of the torque is the same as the angular acceleration that it causes. It’s perpendicular to the force and the lever arm in a right-hand fashion.
To get a little more technical, torque is given by the cross-product of the vector that points from the axis of rotation to the point at which the force is applied, r, and the force vector, F. The cross-product is written as an , so mathematically, the torque vector is the following:
This equation is really a fancy mathematical way of saying that the torque vector has a magnitude of and that the direction of the torque vector is as Figure 11-9 shows.
Figure 11-9: A turning motion toward larger positive angles indicates a positive vector.
The right-hand rule is a useful way of remembering the direction of torque. If you point the thumb of your right hand in the direction of the radius vector r (which points away from the axis of rotation) and your fingers in the direction of the force vector F, then your palm faces the direction of the torque vector (the torque vector is pointing out of your palm).
Example
Q. You give your little sister a northward push on a swing. What direction is the torque you produced?
A. The correct answer is east.
Draw a diagram of the swing set and compass points to orient yourself:
Point your right thumb downward in the direction of the radius.
Point your fingers northward in the direction of the force vector.
Your palm is facing west in the direction of the torque vector.
Practice Questions
1. You push a merry-go-round westward at its edge, perpendicular to the radius. If your push causes the merry-go-round to spin clockwise as viewed from above, what direction is the torque?
2. You pull south on the doorknob to open the door. If the doorknob is on the left side of the door, what direction is the torque you exerted on the door?
Practice Answers
1.Down. Draw a diagram of the merry-go-round and compass points to orient yourself. Point your right thumb southward in the direction of the radius. Point your fingers westward in the direction of the force vector. Your palm is facing upward in the direction of the torque vector.
2.Up. Draw a diagram of the door and compass points to orient yourself. Point your right thumb westward in the direction of the radius. Point your fingers southward in the direction of the force vector. Your palm is facing downward in the direction of the torque vector.
Spinning at Constant Velocity: Rotational Equilibrium
You may know equilibrium as a state of balance, but what’s equilibrium in physics terms? When you say an object has equilibrium, you mean that the motion of the object isn’t changing; in other words, the object has no acceleration (it can have motion, however, as in constant velocity and/or constant angular velocity). As far as linear motion goes, the vector sum of all forces acting on the object must be 0 for the object to be in equilibrium. The net force acting on the object is 0: .
Remember: Equilibrium occurs in rotational motion in the form of rotational equilibrium. When an object is in rotational equilibrium, it has no angular acceleration — the object may be rotating, but it isn’t speeding up or slowing down or changing directions (its tilt angle), which means its angular velocity is constant. When an object has rotational equilibrium, you see no net turning force on the object, which means that the net torque on the object must be 0:
This equation represents the rotational equivalent of linear equilibrium. Rotational equilibrium is a useful idea because given a set of torques operating on an extended object, you can determine what torque is necessary to stop the object from rotating. In this section, you try out some problems that involve objects in rotational equilibrium.
Examples
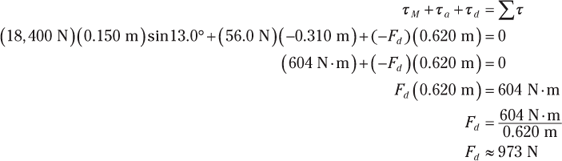
Q. Say that Hercules wants to lift a massive dumbbell using the deltoid (shoulder) muscle in his right arm and hold the weight at arm’s length. His arm, which has a weight of magnitude newtons, can exert a force F of 18,400 newtons. His deltoid muscle is attached to the arm at 13.0°, as the following figure shows. The figure also shows the distances between the pivot point and the points of application of the forces: The distance to the muscle is 0.150 meters, to the effective point of application of the weight of the arm is 0.310 meters (half the length of the arm), and to the dumbbell is 0.620 meters. The weight of the dumbbell has magnitude Fd.
What is the maximum weight of the dumbbell Hercules can hold at arm’s length?
A. The correct answer is 973 newtons.
Hercules’s arm isn’t moving, so and .
Three forces are acting on the arm to cause torques around the arm joint: the y component of F (the pull of Hercules’s deltoid muscle), Fa (the weight of his arm), and Fd (the weight of the dumbbell).
The component of F in the y direction is . The magnitude of the weight of Hercules’s arm is newtons.
The direction of the torque is in the direction perpendicular to the plane of the figure. If positive values correspond to counterclockwise-acting torques and negative values correspond to clockwise-acting torques, the torque from the y component of the muscle-pull F is the following:
This torque is positive because it leads to a turning force in the counterclockwise direction, as the figure shows.
The torque from the weight of Hercules’s arm is
This torque is negative because the lever arm is negative, so the force causes a clockwise torque, as the figure shows.
The torque due to the weight of the dumbbell is
This is negative for the same reason that is negative.
Use to solve for the weight of the dumbbell:
Q. Will the ladder in the following figure fall if θ is 45° and the static coefficient of friction with the floor is 0.70? (Assume that the frictional force between the wall and the ladder is insignificant.) Here are the forces involved:
FW = Force exerted by the wall on the ladder
WP = Weight of the person = 450 N
WL = Weight of the ladder = 200 N (you can assume it’s concentrated at the ladder’s center)
FF = Force of friction holding the ladder in place
A. The correct answer is that the ladder won’t slip.
You want the ladder to be in both linear (Σ F = 0) and rotational (Στ = 0) equilibrium. To be in linear equilibrium, the force exerted by the wall on the ladder, FW, must be the same as the force of friction in magnitude but opposite in direction because those are the only two horizontal forces. So if you can find FW, you know what the force of friction, FF , needs to be.
To find FW, take a look at the torques around the bottom of the ladder, using that point as the pivot point. All the torques around that point have to add up to 0. The torque due to the force from the wall against the ladder is
This torque is negative because it tends to produce a clockwise motion toward smaller angles.
The torque due to the person’s weight is
The torque due to the ladder’s weight is
Both torques are positive, so because Στ = 0, you get this result when you add all the torques together:
Solve for FW:
That means the force the wall exerts on the ladder is 437 newtons. Note that this force is also equal to the frictional force of the bottom of the ladder on the floor because FW and the frictional force are the only two horizontal forces in the whole system. So the force of friction needed is
What is the maximal force of friction possible given the static coefficient of friction between the ladder and the floor? Use this equation:
FN is the normal force of the floor pushing up on the ladder, and it must balance all the downward-pointing forces in this problem because of linear equilibrium. That means you have the following:
Plug in the numbers, using the value of μs 0.70:
That’s your answer — you need 437 newtons, and you actually have up to 455 newtons available, so the ladder isn’t going to slip.
Practice Questions
1. You’re opening a door by pushing on its outer edge with a force of 100 newtons at 90°, and someone is trying to keep the door shut by pulling on it one-third of the door’s width from the hinge. What force does the other person need to supply perpendicular to the door to keep the door in rotational equilibrium?
2. You’re on a teeter-totter with a total length of 2L with a person twice your weight. The other person’s sitting only one-third of the distance from the pivot point, however. Where must you sit to balance the person out?
3. A motor can provide 5,000 newton-meters of torque. If you can provide 33 newtons of force, how far away from the motor’s axle must you be to produce rotational equilibrium?
4. The cap on top of the oil well is frozen. If it takes 450 newton-meters of torque to free it and you have a wrench that’s 0.40 meters long, how much force must you apply?
Practice Answers
1.300 N. Use the equation Στ = 0.
Find the torque you apply by using this equation, where L is the width of the door:
Find the torque the other person applies by using this equation, where F is the force that person applies:
To have rotational equilibrium, set these two torques equal and solve for F:
2.2L/3. Use the equation Στ = 0.
Find the torque the other person applies by using this formula, where F is the force that person applies and m is your mass:
Find the torque you apply by using this equation, where x is your distance to the pivot:
To have rotational equilibrium, set these two torques equal and solve for x:
3.150 m. Use the equation Στ = 0.
Find the torque you apply:
Set that equal to the torque of the motor and solve for x:
which rounds to 150 meters with significant figures.
4.1,100 N. Use the equation Στ = 0.
Find the torque you apply:
Set that equal to the torque needed and solve for F:
which rounds to 1,100 newtons with significant figures.






 means “change in,” f means final, and i means initial. In the linear equations, v is velocity, s is displacement, and a is acceleration. In the angular equations,
means “change in,” f means final, and i means initial. In the linear equations, v is velocity, s is displacement, and a is acceleration. In the angular equations,  is angular velocity (measured in radians per second),
is angular velocity (measured in radians per second),  is angular displacement in radians, and
is angular displacement in radians, and  is angular acceleration (in radians per second2).
is angular acceleration (in radians per second2). — this is a measure of the angle through which an object has rotated. The magnitude tells you the size of the angle of the rotation, and the direction is parallel to the axis of the rotation. Similarly, angular velocity,
— this is a measure of the angle through which an object has rotated. The magnitude tells you the size of the angle of the rotation, and the direction is parallel to the axis of the rotation. Similarly, angular velocity,  , has a magnitude equal to the angular speed and a direction that defines the axis of rotation. The angular acceleration,
, has a magnitude equal to the angular speed and a direction that defines the axis of rotation. The angular acceleration,  , has a magnitude equal to the rate at which the angular velocity is changing; it’s also directed along the axis of rotation.
, has a magnitude equal to the rate at which the angular velocity is changing; it’s also directed along the axis of rotation. ,
,  , and
, and  don’t appear in bold type because they represent the single component of a rotation in a plane. In the section “
don’t appear in bold type because they represent the single component of a rotation in a plane. In the section “ , angular velocity
, angular velocity  , and angular acceleration
, and angular acceleration  to their associated tangential quantities. All you have to do is multiply by the radius, using these equations:
to their associated tangential quantities. All you have to do is multiply by the radius, using these equations:


 radians per second. What does this mean in terms of your motorcycle’s speed? To determine your motorcycle’s velocity, you need to relate angular velocity,
radians per second. What does this mean in terms of your motorcycle’s speed? To determine your motorcycle’s velocity, you need to relate angular velocity,  , to linear velocity, v. The following sections explain how you can make such relations.
, to linear velocity, v. The following sections explain how you can make such relations. , the tangential velocity at any radius is of magnitude
, the tangential velocity at any radius is of magnitude  . The idea that the tangential velocity increases as the radius increases makes sense, because given a rotating wheel, you’d expect a point at radius r to be going faster than a point closer to the hub of the wheel.
. The idea that the tangential velocity increases as the radius increases makes sense, because given a rotating wheel, you’d expect a point at radius r to be going faster than a point closer to the hub of the wheel. .
.
 radians; the complete distance around a circle — its circumference — is
radians; the complete distance around a circle — its circumference — is  , where r is the circle’s radius. In general, therefore, you can connect an angle measured in radians with the distance you cover along the circle, s, like this:
, where r is the circle’s radius. In general, therefore, you can connect an angle measured in radians with the distance you cover along the circle, s, like this:
 , where v is magnitude of the velocity, s is the distance, and t is time. You can substitute for s to get
, where v is magnitude of the velocity, s is the distance, and t is time. You can substitute for s to get
 , you can say that
, you can say that

 radians per second What is the motorcycle’s speed if the radius of one of the motorcycle’s wheels is 40 centimeters?
radians per second What is the motorcycle’s speed if the radius of one of the motorcycle’s wheels is 40 centimeters?






 , which tells you how the speed of the object in the tangential direction is changing.
, which tells you how the speed of the object in the tangential direction is changing. is the change in velocity and
is the change in velocity and  is the change in time) to relate tangential quantities like tangential velocity to angular quantities such as angular velocity:
is the change in time) to relate tangential quantities like tangential velocity to angular quantities such as angular velocity:
 (as you see in the preceding section), so you can plug in this information:
(as you see in the preceding section), so you can plug in this information:

 , the angular acceleration, so the equation becomes
, the angular acceleration, so the equation becomes











 (see the earlier section “
(see the earlier section “

 meters, and the moon orbits the Earth about once every 28 days.
meters, and the moon orbits the Earth about once every 28 days. .
.



 kilograms, and the distance between the Earth and the sun is about 150,000,000 kilometers.
kilograms, and the distance between the Earth and the sun is about 150,000,000 kilometers. m/s2. Use the centripetal-acceleration equation:
m/s2. Use the centripetal-acceleration equation:
 N. Convert 1 year to seconds:
N. Convert 1 year to seconds:

 ,
,  , and
, and  appear in bold type because you’re explicitly dealing with vectors.
appear in bold type because you’re explicitly dealing with vectors. ; which direction does its angular velocity,
; which direction does its angular velocity, 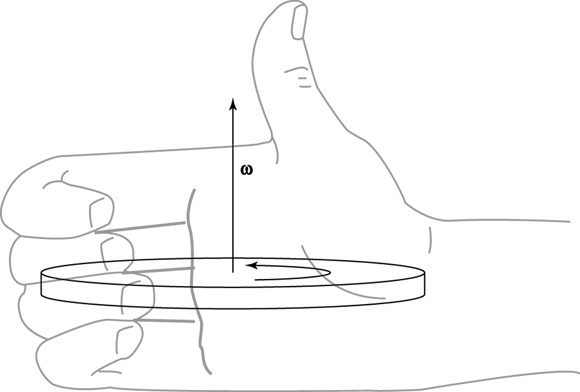
 .
. , angular acceleration,
, angular acceleration,  , is a vector, meaning it has a magnitude and a direction. Angular acceleration is the rate of change of angular velocity:
, is a vector, meaning it has a magnitude and a direction. Angular acceleration is the rate of change of angular velocity:
 points in the same direction as
points in the same direction as  in
in  , points along the angular velocity,
, points along the angular velocity,  , the magnitude of
, the magnitude of  will increase as time goes on, as
will increase as time goes on, as 


 , you need to put the mass M exactly half as far from the fulcrum as the mass m is.
, you need to put the mass M exactly half as far from the fulcrum as the mass m is. , where
, where  is the angle between the force and a line from the axis to the point where the force is applied.
is the angle between the force and a line from the axis to the point where the force is applied.
 (tau):
(tau):
 . If you push with a force of 200 newtons and r is 0.5 meters, what’s the torque you see in the figure? In
. If you push with a force of 200 newtons and r is 0.5 meters, what’s the torque you see in the figure? In 







 , so mathematically, the torque vector is the following:
, so mathematically, the torque vector is the following:
 and that the direction of the torque vector is as
and that the direction of the torque vector is as 
 (the torque vector is pointing out of your palm).
(the torque vector is pointing out of your palm).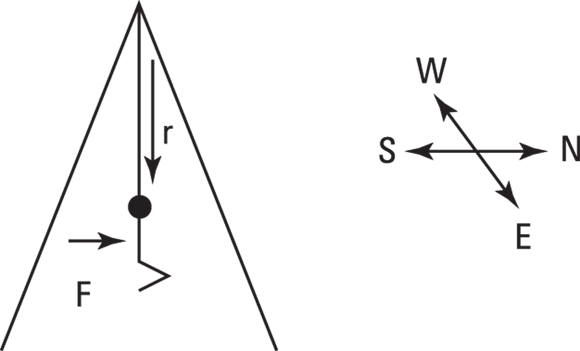


 .
.
 newtons, can exert a force F of 18,400 newtons. His deltoid muscle is attached to the arm at 13.0°, as the following figure shows. The figure also shows the distances between the pivot point and the points of application of the forces: The distance to the muscle is 0.150 meters, to the effective point of application of the weight of the arm is 0.310 meters (half the length of the arm), and to the dumbbell is 0.620 meters. The weight of the dumbbell has magnitude Fd.
newtons, can exert a force F of 18,400 newtons. His deltoid muscle is attached to the arm at 13.0°, as the following figure shows. The figure also shows the distances between the pivot point and the points of application of the forces: The distance to the muscle is 0.150 meters, to the effective point of application of the weight of the arm is 0.310 meters (half the length of the arm), and to the dumbbell is 0.620 meters. The weight of the dumbbell has magnitude Fd.
 and
and  .
. . The magnitude of the weight of Hercules’s arm is
. The magnitude of the weight of Hercules’s arm is  newtons.
newtons.


 is negative.
is negative. to solve for the weight of the dumbbell:
to solve for the weight of the dumbbell: