In his book The Unknown Tomorrow, published in 1910, Anglo-French journalist and writer William Tufnell Le Queux described a civilization where “nearly everybody possesses his own aeroplane.” It was a dream delayed by two world wars, but that vision may soon be coming true, if in rather a roundabout manner.
To understand the unmanned vertical takeoff electric airplane, we must follow two historical threads, both of which begin again in France. The origins of the controlled unmanned aircraft begin in Paris, with Octave Détable, general clerk at the Paris Law Courts and vice-president of the French Kite-Flying League. In 1894, Détable had built and flown a kite with divergent cones to give it stability, an innovation he improved in 1897 with his 19 m2 (200 ft2) kite. By 1914 Détable and his son Pierre had progressed to a low-powered flying machine with Lieutenant Max Boucher, trained by Louis Blériot in Etampes, as his test pilot. These tests were interrupted by the declaration of war, but three years later, Captain Boucher, following the advice of General Ferrie, a wireless pioneer, and in collaboration with a team of lieutenant engineers, installed a remote-control transmitter system into a 150 hp Voisin aeroplane. On July 2, 1917, the pilotless plane, carrying a sack of sand weighing 95 kg (210 lb.) to replace the pilot, made a test flight. With only 2 liters (½ gal.) of gas on board, after 1 kilometer, the plane landed, having run out of fuel.1
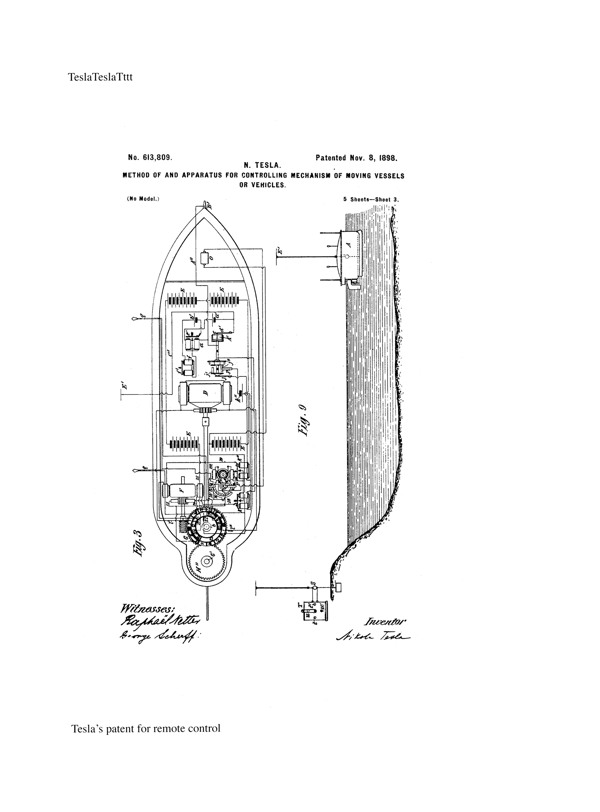
Given that UAVs are remote-controlled, mention should also be made that in the 1890s, hydrogen-filled model airships, controlled by a spark-emitted radio signal, were flown as a music-hall act around theater auditoriums.2 Then in 1898, watched by thousands of spectators, Croatian inventor Nikola Tesla had demonstrated the application of Herzian waves when he radio-controlled his 4-ft. (1.2 m) “teleautomaton” model electric boat up and down a pond at New York’s recently completed Madison Square Garden during an electrical exhibition. Tesla was able to control the boat’s motor, sending it zipping around the pond seemingly under its own control. He even installed lights on it that he could blink at a distance from his control box. Many observers, unfamiliar with radio waves, thought that the device must have a brain of its own or that somehow Tesla was controlling it with his mind. When it was first shown, “it created a sensation such as no other invention of mine has ever produced,” Tesla would later write. He had taken out U.S. and UK patents for it.3
Twelve years later, in 1910, an experiment was carried out with a full-scale boat on the Dutzendteich Lake near Nuremberg, Germany. Christoph Wirth, an electrophysicist, having patented a wireless-controlled current distributor, decided to test it out in a boat. Together with the manufacturer Beck and a merchant named Knauss, Wirth set up the demonstration of a 33-ft (10-m) boat called the Prinz Ludwig with a 3 kW motor and an accumulator battery of 80 volts and 300 ampere-hours. The experiment began with the pilotless boat positioned out in the center of the lake in front of the clubhouse of the Kaiserliche Marine (Imperial German Admiralty). At the given signal, a gunshot, the Prinz Ludwig silently accelerated to a speed of 10 mph (16 kmh). It was then made to turn right or left or to stop completely and start again by the controlling operator in obedience to the requests from members of the club. Each order was executed within one to five seconds, and signal lights flashed back the receipt of the impulses. The maneuvers were continued for several hours. In the weeks that followed, “das Geisterschiff” (“The Phantom Ship”) attracted many spectators—military, scientific, and the simply curious—who paid a small sum for admission to the immediate neighborhood of the operator on the bank. In 1912 a boat 50 feet (15 m) in length was exhibited in Berlin, again at the invitation of the Kaiserliche Marine Club. An antenna of four wires was stretched between the cupola of the Kaiser Pavilion and the restaurant on the shore of the Wannsee. The transmitting apparatus, which was installed at the restaurant, was of the induction coil type, and was of about 100 watts capacity. The various operations performed on the boat were accomplished by sending impulses by means of a Morse key. The boat was equipped with an antenna of four wires about 15 feet (4.5 m) high, a radio receiver capable of adjustment to different wavelengths from the transmitter, a distributor or selector, electric steering apparatus, signal guns, lights, and fireworks apparatus. The tuning of the apparatus could be altered by sending a long signal; this was for the purpose of evading interference. The implications of such a device for controlling the direction of a torpedo were not to be ignored.4
Nikola Tesla’s patent for the remote control of his 4-foot “teleautomaton” on a pond at the recently completed Madison Square Garden, New York, in 1898.
Over in Britain, Archibald Montgomery Low, a consulting engineer, was preparing his Aerial Target (AT), an unmanned flying machine remotely controlled by wireless telegraph. Its main task was to train apprentice pilots to shoot without risking shooting down the plane towing the target. Assisted by Captain Poole and Lieutenant Bowen, Low demonstrated a working prototype. Impressed, General Sir David Henderson (Director-General of Military Aeronautics) ordered that the Royal Flying Corps Experimental Works should be created to build the first proper Aerial Target, complete with explosive warhead. As head of the Experimental Works, Low was given about 30 picked men, including jewelers, carpenters and aircraftsmen in order to get the pilotless plane built as quickly as possible. The plane, named the Ruston Proctor AT from its manufacturer, was designed by H.P. Folland.
It had its first trial on March 21, 1917, at Upavon Central Flying School near Salisbury Plain, attended by 30 to 40 allied generals. The AT was launched from the back of a truck using compressed air (another first). Low and his team successfully demonstrated their ability to control the craft before engine failure led to its crash landing. A subsequent full trial on July 6, 1917, was cut short, as an aerial had been lost at takeoff. At a later date, an electrically driven gyro (yet another first) was added to the plane, but ultimately the Aerial Target project was not followed up after the war, due to the shortsightedness of military planning. Low later came to be known as the “father of radio guidance systems” due to his pioneering work on guided rockets, planes and torpedoes.
In the United States, Lawrence Sperry, a Curtiss Flying School graduate and son of Elmer Sperry, had developed a lightweight gyroscopic stabilizer apparatus that could be coupled to control surfaces to maintain the flight axes of aircraft. Having fitted it onto a Curtiss C-2 biplane with a hydroplane fuselage, in June 1914 Sperry Jr. entered and won the Concours de la Securité en Aéroplane (Airplane Safety Competition) held on the banks of the Seine River by the Aero Club of France. During World War I, Sperry Instruments Corporation introduced advanced aircraft instruments, including compass, air speed indicator, altimeter, bank indicator, angle of attack and stall warning. In 1917, with Peter Cooper Hewitt, Sperry worked on a radio-controlled airplane project, the Hewitt-Sperry Automatic Airplane. An adapted Curtiss C9 Seaplane, it included the Sperry automatic gyroscope to control and maintain an airplane in any desired position, and also to free a pilot for aiming and dropping bombs.
Back in France, Captain Boucher continued his experiments with automatic stabilization, controlled flight, programmed flight, and remote-controlled flight. On September 14, 1918, a Voisin BN3 plane was flown for 51 minutes on a journey of 100 km (60 mi). It flew from Chicheny, to Méréville, Pussay, Chicheny, Villesauvage, Chalou, and landed back at Chicheny. The following day Captain Boucher received the order to cease operations and to lay off his team. War was soon over. Despite this, George Clemenceau, then president of the Senate Commission of the Army, launched an unmanned airplane contest. So Boucher persisted. Working with engineer Maurice Percheron, on April 17, 1923, he succeeded in flying a new unmanned aircraft from a field in Etampes, but this was not enough to obtain continued support from the military. Boucher died, virtually forgotten, in 1929.5
Over in the USA, another unmanned aerial vehicle was developed in 1918 as a secret project supervised by Orville Wright and Charles F. Kettering. Kettering was an electrical engineer and founder of the Dayton Engineering Laboratories Company, known as Delco, which pioneered electric ignition systems for automobiles and was soon bought out by General Motors. At GM, Kettering continued to invent and develop improvements to the automobile, as well as portable lighting systems and refrigeration coolants, and he even experimented with harnessing solar energy. When the U.S. entered World War I, his engineering prowess was applied to the war effort. Under Kettering’s direction, the government developed the world’s first “self-flying aerial torpedo,” which eventually came to be known as the “Kettering Bug.” The bug was a simple, cheaply made 12-foot (3.66 m)long wooden biplane with a wingspan of nearly 15 feet (4.58 m) that, according to the National Museum of the U.S. Air Force, weighed just 530 pounds (240 kg), including a 180-lb. (80 kg) bomb. It was powered by a four-cylinder, 40-horsepower engine manufactured by Ford. Kettering believed that his Bugs could be calibrated for precision attacks against fortified enemy defenses up to 75 miles (120 km) away—a much greater distance than could be reached by any field artillery. During the 1920s, what had become the U.S. Army Air Service continued to experiment with the aircraft until funding was withdrawn.
The Royal Aircraft Establishment Larynx (from “Long Range Gun with Lynx engine”) was an early British pilotless aircraft, to be used as a guided anti-ship weapon. Started in September 1925, it was an early cruise missile guided by an autopilot.
Geoffrey de Havilland was not only an aircraft designer and builder. He was a passionate lepidopterist or lover of butterflies and moths. His airplanes, built at Stage Lane Aerodrome, Edgeware, North London, were therefore named Hermes Moth, Genet Moth, Gipsy Moth, Cirrus Moth and Giant Moth. In 1935, de Havilland produced a pilotless version of their Tiger Moth DH.82 which was called the Queen Bee. But their noisy, slow and heavy flight rather made them look like male drones rather than queen bees. These aircraft retained a normal front cockpit for test-flying or ferry flights, but a four-bladed wooden windmill in the propeller slipstream on the fuselage port side drove an air pump to provide compressed air for the gyro unit and servos. The Queen Bee was first flown, manned, at Hatfield in 1935, then remotely controlled at Farnborough later that year. A total of 412 were built between 1933 and 1943.
In December 1935, the Chief of U.S. Naval Operations, Admiral William H. Standley, attended the London Disarmament Conference, after which he was given a demonstration of the Queen Bee. On his return, Standley assigned an officer, Lieutenant Cmdr. Delmer S. Fahrney at the Radio Division of the Naval Research Laboratory, to develop a similar system for U.S. Navy gunnery training. Fahrney adopted the name “drone” to refer to these aircraft in homage to the Queen Bee. Drone became the official U.S. Navy designation for target drones for many decades.6
But this output pales into insignificance when compared to the U.S. Navy’s autonomous aircraft target, the U.S. Radiophone OQ-2, otherwise known as Target Drone Denny 1 (TDD-1), of which several thousand units were built. A follow-on version, the OQ-3, became the most widely used target aircraft in U.S. service, with over 9,400 being built during World War II. The U.S. Navy also launched a new program, called Operation Anvil, to target deep German bunkers using refitted B-24 bombers filled to double capacity with explosives and guided by remote control devices to crash at selected targets in Germany and Nazi-controlled France.
The Third Reich’s ground/air radio-controlled missiles V-1 and V-2 had a flight schedule preset before takeoff. But the “Wasserfall” V-2 could be remotely controlled by a microwave radar system called “Rheinland.” Other radio-controlled missiles with names such as Enzian and Rheintochter were also developed, as well as no fewer than 5 radio control systems (Burgund, Franken, Elsass, Brabant, Ganza). Air/ground radio-controlled missiles were also developed such as the Hs 293 and Fritz-X, which were piloted by a Strasburg-Kehl radio control system using a 48–50 MHz waveband.
Drones were also developed during the Korean War and the Vietnam War for observation and surveillance missions in enemy territory. In 1993 the Japanese cult Aum Shinriko looked at using a radio-controlled helicopter to spray nerve gas.
Our second thread, the vertical takeoff multi-rotor airplane, or copter, can be traced much further back. It was in 1493 that the Italian polymath Leonardo da Vinci, also cited in Chapter One of this history, made a sketch in his notebook of a screw-like machine, commenting: “If this instrument made with a screw be well made—that is to say, made of linen of which the pores are stopped up with starch and be turned swiftly, the said screw will make its spiral in the air and it will rise high.”7
Four hundred years later, in 1863, the Viscount Gustave du Ponton d’Amécourt, president of the Society for the Encouragement of Aerial Locomotion by Means of Heavier than Air Machines, published a forty-page monograph in Paris, titled “The Conquest of the air by propeller. Account of a new system of aviation.” In this he put together the Greek words helico and pteron, meaning “spiral” and “wing,” to make the word hélicoptère (helicopter). For d’Amécourt and his friends were among those very few who were passionately convinced that the future of flying was with heavier-than-air machines. To prove their point, having built a fragile flying machine model driven by clockwork springs, they watched it ascend vertically for a few seconds to a height of less than 3 meters (10 feet), only to crash back to the ground. Stimulated by the brief success of his clockwork models, in 1868, the Viscount built a hélicoptère powered by a small steam engine with an aluminum boiler. This model proved a failure inasmuch as it only lifted a third of its own weight.8
Still in France, forty years later, Louis Charles Bréguet and his younger brother Jacques were working on AC electric motors for submarines at the family business in Douai, France, when they came into contact with the respected physiologist Professor Charles Richet. He challenged them to design a gyroplane with flexible wings. The Bréguet-Richet had an uncovered open steel framework with a seat for the pilot and a 34 kW (46 hp) Antoinette water-cooled piston engine at the center. Radiating from the central structure were four wire-braced tubular steel arms, each bearing a superimposed pair of four-bladed rotors. In essence, a quadcopter. To eliminate the torque effect, two rotor sets were driven clockwise and two counterclockwise. On September 29, 1907, Gyroplane No. I was given a static test by engineer Maurice Volumard in the family factory and then flown in a field at La Brayelle, albeit to an elevation of only 0.6 meters (2.0 ft) for a couple of minutes! It was not a free flight, as four men were used to steady the structure. It was neither controllable nor steerable, but it was the first time a rotary-wing device had lifted itself and a pilot into the air. It later flew up to 1.52 m (4.99 ft) above the ground. The design was improved and Gyroplane No. II appeared the following year. No. II had two two-blade rotors of 7.85 m (25.75 ft) diameter and also had fixed wings. Powered by a 41 kW (55 hp) Renault engine, it was reported to have flown successfully more than once in 1908. No. II was damaged in a heavy landing and was rebuilt as the No. II bis. It flew at least once in April 1909 before being destroyed when the company’s works were badly damaged in a severe storm.
Papin and Rouilly’s “Gyroptère” of 1914, resembling a giant boomerang, was meant to work in reverse of a falling maple seed (©D.R. / Coll. musée de l’Air et de l’Espace, Le Bourget).
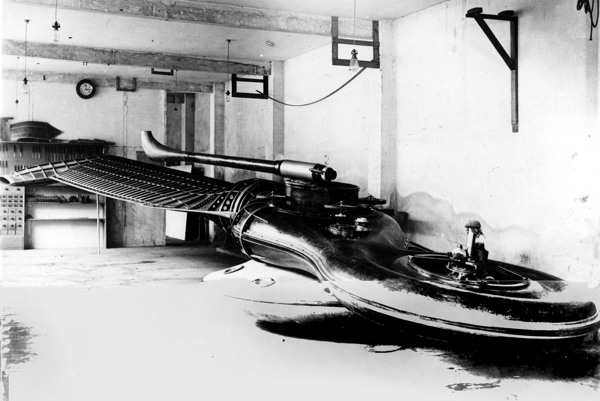
Another French flight design was inspired by the motion of the maple seed spinning as it falls to the round. In 1913, Alphonse Papin and Didier Rouilly of Paris obtained French and world patents for their “Gyroptère,” characterized in the contemporary French journal La Nature in 1914 as “un boomerang géant” (a giant boomerang).
The machine weighed 500 kg (1,100 lb.) including the float on which it was mounted. It had a single hollow blade with an area of 12 square meters (130 sq ft.), counterweighted by a fan driven by an 80 hp Le Rhone rotary engine spinning at 1,200 rpm, which produced an output of just over 7 cubic meters (250 cu ft.) of air per second. The fan also propelled air through the hollow blade, from which it escaped through an L-shaped tube at a speed of 100 m/s (330 ft/s). Directional control was to be achieved by means of a small auxiliary tube through which some of the air was driven and which could be directed in whatever direction the pilot wished. The pilot’s position was located at the center of gravity between the blade and the fan. Testing was delayed due to the outbreak of World War I and did not take place until March 31, 1915, on Lake Cercey on the Côte-d’Or. Due to the difficulty of balancing the craft, a rotor speed of only 47 rpm was achieved instead of the 60 rpm which had been calculated as necessary for takeoff. In addition, the rotary engine used was not powerful enough; it had originally been planned to use a 100 hp car engine, which proved unobtainable. Unfortunately, the aircraft became unstable and the pilot had to abandon it, after which it sank. As we will see, this design has also been resurrected by drone engineers.
Still in France, then the cradle of innovation, Etienne Edmond Oehmichen was a keen naturalist studying the flight of birds and insects. He earned his bread and butter as an electrical engineer, first at the Electrical Department of the Mechanical Construction Company of Alsace in Belfort, then with Peugeot at Beaulieu-Valentigney, where he innovated electric lighting and a starting system for automobiles. He also patented an electric stroboscope for inspecting auto parts. In 1920, Oehmichen published a book, Nos maîtres les oiseaux, étude sur le vol animal et la récupération de l’énergie dans les fluides, published by Dunod (Our masters, the birds, a study on animal flight and recovering energy in fluids).
In 1921, financed by Peugeot, Oehmichen assembled his first “hélicostat,” fitted with two large propellers and a hydrogen balloon to ensure stability, and on February 18, made a flight of 1 minute at a height of 10 meters. On November 11, 1922, he first flew Hélicoptère Oehmichen No. 2, fitted with twelve propellers (four for lifting and eight for direction). He then progressed to four vertical axis rotors distributed on either side of the fuselage, while five small propellers ensured horizontal stability, completed by a steering prop and two forward props propelled by an 88 kW Rhône motor. On May 4, 1924, Oehmichen made a flight of 1 km around a closed triangular circuit on the Arbouans flying field, next to Peugeot’s auto factory. The VTOL was born. The feat enabled him to obtain a grant of 90,000 francs from the Service Technique de l’Aéronautique (STAé) with which he was able to pay back Peugeot. The same year, he made a stationary flight of three minutes, then another with two passengers on board. Oehmichen continued to develop his hélicostats, integrating the technologies of rotary wing and airship, but was unable to win over those responsible for aeronautics. In his conference of May 20, 1937, at the French Colonial Institute, Oehmichen stated his firm belief that the hélicostat was the only solution to ensure aerial safety.
Across the Atlantic, at the same time, George de Bothezat and his assistant Ivan Jerome, both refugees from the Russian Revolution, were also working on an experimental quad-rotor helicopter. Having written and lectured extensively on rotorcraft theory, de Bothezat received a contract from the United States Army in 1921 for the construction of an experimental quadcopter they called the “Jerome-de Bothezat Flying Octopus.” Built by the U.S. Air Service, it made its first flight in October 1922. Although its four massive six-bladed rotors allowed the craft to successfully fly, it suffered from complexity, control difficulties, and high pilot workload, and was reportedly only capable of forward flight in a favorable wind. About 100 flights were made by the end of 1923. Designed to take a payload of three people in addition to the pilot, it was supposed to reach an altitude of 100 meters (330 feet), but the highest the Octopus ever reached was about 5 m (16 ft)! The Army canceled the program in 1924, and the aircraft was scrapped.
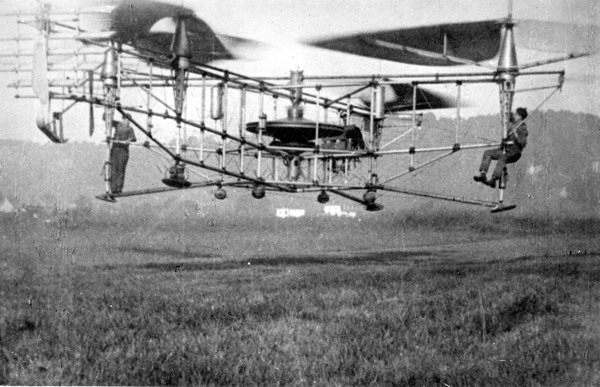
In 1922, Etienne Edmond Oehmichen designed and personally test flew his experimental “hélicostats” (©D.R. / Coll. musée de l’Air et de l’Espace, Le Bourget).
Both the Oemichen and Bothezat designs were propelled by propellers perpendicular to the main rotors and were therefore not true quad-rotors. Since these early designs suffered from poor engine performance and could only reach a couple of meters in height, not much was done to the quad-rotor design during the following three decades.
One rare example was the disc-copter, designed by a polymath sculptor, carpenter and blacksmith called Alexander G. Weygers of Oakland, California. Fascinated with the concept of flight from an early age, as Weygers watched dolphins skimming the waves at the bow of ships, he wondered how they could swim so fast, for such a long time. When he realized they were actually surfing the cushion of water pushed in front of the ship, he was inspired to apply this principle to the designs for his flying machine. The disc-copter was designed to float on a stream of air from internal rotors, housed within the body of the machine. He was working on his idea of what we now call a “flying saucer” from 1927 and sent detailed plans to all the branches of the U.S. military. He was eventually told that they were intrigued by the concept and the design of the craft, but were not prepared at that time because the war effort superseded its development. He was only granted U.S. Patent US2377835 in June 1945.
In January 1928, the U.S. Patent Office granted Nikola Tesla what would be his final patent, for a “novel method of transporting bodies through the air” (1,655,114). Calling it a helicopter-plane, he described and sketched an open box-type craft with a tilting propeller and wing that theoretically would enable the vehicle to rise vertically and fly horizontally, though he also suggested a design in which two propellers “coaxially or otherwise disposed” would “revolve in opposite directions,” powered by his turbine engine. By 1928, Tesla was without a laboratory or funding and headed toward impoverishment, passing much of his time tending to the pigeons in New York City’s Bryant Park. He died alone and penniless in 1943 at 86.
In 1938 during a Philadelphia Conference on VTOL, test pilot James G. Ray proposed that “A vehicle that can take you from your home to your office, to your country club, or your bank or to your friend’s house, by air or by road, whichever is most convenient, will have a vast usefulness.” In 1931, Ray, who later envisioned a convertiplane in every garage, landed his Pitcairn PCA-2 autogiro on the White House lawn, showed it to President Hoover, and took off in it again.
In May 1951, Modern Mechanix published a picture story, titled “Flying Saucer,” about another German, Walter Otto Galonska of Frankfurt-am Main, who, for advertising purposes only, had spent a year building a small oval flying machine powered by two contra-rotating props. Since the postwar building of free-flying machines was forbidden to Germans by the Western Powers, Galonska had tethered it with an electrical supply steel cable. Further research has revealed that some six years before, on April 2, 1945, Galonska, who had developed plans for a device for controlling unmanned airplanes on his estate in Breslau, was offered a contract by the Soviet Union to build a free-flying working model, but the Americans heard about it. Despite U.S. Military Government Law No. 23, Article III, Paragraph b: “Applied scientific research is prohibited in the fields of aerodynamics,” in July 1948 Golanska was allowed to build Germany’s first postwar model aircraft in Frankfurt, as seen in the American magazine. In 1958, Galonska received U.S. Patent 3059428 for an internal combustion engine supercharging turbine for liquid fuels and coal dust, although nothing more was heard of his unmanned helicopter design, or drone.
In 1956, David H. Kaplan designed and test flew the first true quad-rotor, the 1-ton heavy Convertawings Model “A,” which was able to hover and maneuver over Long Island using its two 90 horsepower engines. The four rotors were positioned in an “H” configuration, and the design incorporated simplified hubs with strap-mounted blades, a form of “hinge-less” rotor. Convertawings proposed a Model E that would have a maximum weight of 42,000 lb. (19 metric t) and to be able to fly with a payload of 10,900 lb. (4.9 metric t) to over 300 miles (480 km) and at up to 173 mph (278 kph). Despite successful testing and development, military support for the quad-rotor ceased following cutbacks in defense spending.
Also working on this configuration was Richard Vogt, former Nazi engineer and aircraft designer, recruited in post–Nazi Germany and taken to the U.S. for government employment, at the end of World War II. While working for Hamburger Flugszeugbau, Vogt had designed Seedrache (English: Sea Dragon), a long-range maritime reconnaissance flying boat. The aircraft was powered by three engines. The center engine was mounted above the “hanged” fuselage. By the late 1950s Vogt, in his sixties, was chief designer at Curtiss-Wright’s Santa Barbara Division (formerly the Aerophysics Development Corporation) when he was asked to design a flying jeep-type light VTOL utility vehicle, designated the VZ-7. It was of exceedingly simple design, essentially consisting of a 16-ft. (5-m) rectangular central airframe to which four vertically-mounted propellers were attached in a square pattern. The central fuselage carried the pilot’s seat, flight controls, fuel and lubricant tanks, and the craft’s single 425shp Turbomeca Artouste IIB shaft turbine engine. In essence, it was a quadcopter. The aircraft performed well during tests, but was not able to meet the Army’s standards; therefore it was retired and returned to the manufacturer in 1960. Vogt’s Patent U.S. D189462 S, granted in December 1960, would become the ancestor for today’s quadcopter innovations.
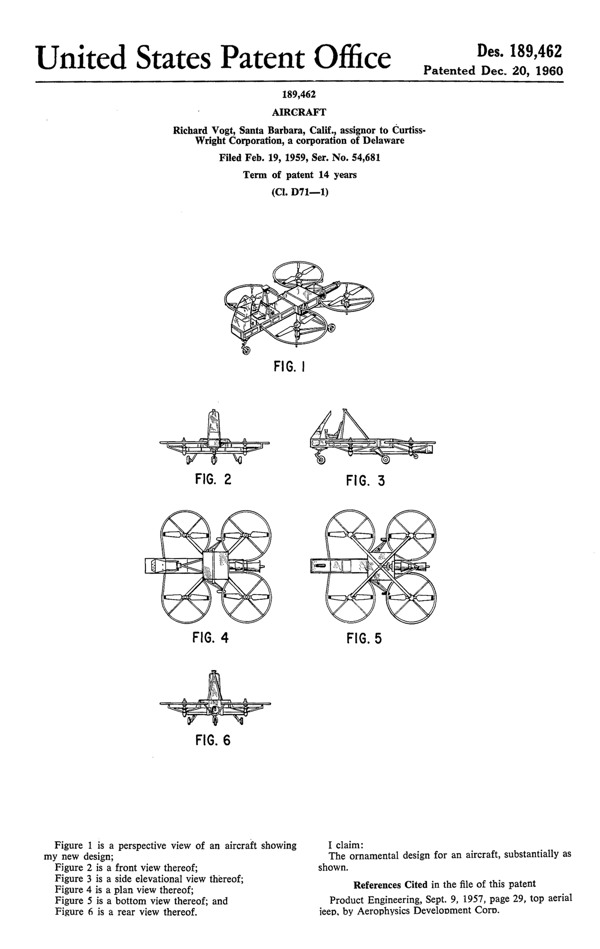
Richard Vogt’s 1960 patent was the ancestor of today’s quadcopter variations.
In 1959 Edward G. Vanderlip, working for the Piasecki Aircraft Corporation in Essington, Pennsylvania, applied for a patent for an “Omni-directional, vertical-lift, helicopter drone.” From 1942 to 1946, Vanderlip had already worked for the U.S. government on the first stabilization system for guided missiles, and as vice-president at Piasecki he now created the automatic pilot for this drone—a 6-cylinder Lycoming gas-engined quadcopter called “Sea-Bat” for VTOL from U.S. Navy ships with a top speed of 92 mph. In order to reduce the controller’s need to remotely fly the drone, Vanderlip’s ingenious system and rotor configuration were designed to allow the drone’s center body to keep a constant azimuth heading regardless of direction of travel. While Piesecki went onto the develop the “Mud-Bat” and “Ice-Bat,” Vanderlip and John J. Schneider (formerly of Curtiss-Wright) left Piasecki to create the Vanguard Air & Marine Corporation in Radnor, Pennsylvania, to further develop what they called the Omniplane in cooperation with the USAF Wright Air Development Center and NASA’s Ames Center.
It was in the late 1950s that the U.S. Air Force, concerned about losing pilots over hostile territory, began planning for unmanned flights. Following a Soviet Union shootdown of the secret U-2 aircraft in 1960, the highly classified UAV or drone program was launched under the code name “Red Wagon.” Modern-era UAVs got their first use during the August 2 and 4, 1964, clash in the Tonkin Gulf between the U.S. and North Vietnamese navies. After Chinese photographs surfaced of downed U.S. unmanned aircraft during and after the Vietnam War, the official U.S. Air Force response was “no comment.” However, by 1973, the U.S. military officially confirmed that they had been utilizing UAV technology in Vietnam, stating that during the war, more than 3,435 UAV missions were flown, of which about 554 were lost in combat.
During the 1973 Yom Kippur War, aided by the U.S. government, Israel developed the first UAV with real-time surveillance, after Soviet Union surface-to-air missiles used by Egypt and Syria dealt heavy damage to Israel’s fighter jets. The images and radar decoying provided by these UAVs helped Israel to neutralize Syria’s air defenses at the start of the 1982 Lebanon War, resulting in no pilots lost. By 1987, Israel had developed proof-of-concept capabilities in tailless, stealth-based, three-dimensional thrust-vectoring flight control, jet steering UAVs for the first time. Interest in UAV technology grew during the 1980s and 1990s—being used during the Persian Gulf War in 1991—and became cheaper and more capable fighting machines. While most drones of the earlier years were primarily surveillance aircraft, some carried munitions. The General Atomics MQ-1, which utilized an AGM-114 Hellfire air-to-ground missile, was known as an unmanned combat aerial vehicle (UCAV).
At least 45 combustion-engine VTOL, short-take-off-and-vertical-landing (STOVL) and vertical-or-short-takeoff-and-landing (V/STOL) aircraft able to fly faster than helicopters were built and tested in the last half of the 20th century. But only four ever went into production. The ones scrapped had four or six—or as many as 10—engines to distribute propulsion. But the capability was never compelling enough to justify the cost, complexity and poor reliability of all those engines, transmissions, driveshafts and gearboxes.9
The next step was electric propulsion.