Taking Control
Testing and Modifying
I’d been putting in the training hours and was
pretty confident that I would be able to supply
the required levels of power, but controlling
the HPA on take-off would be crucial.
HE latest calculations factoring in the
new propeller showed that the prop
reached its optimum efficiency at 28
mph – any slower than that and it would feel like
I was pedalling through treacle. That meant I
would have to be pedalling along the ground
pretty much at the record speed just to make sure
that I could achieve take-off.
T
The flaps in the tail would have to be raised to
bring the nose up. This would change the ‘angle
of attack’ of the wing – the angle at which it
cuts into the air flow – and generate that rush
of lift that I needed to get off the ground. Once
airborne, the HPA would suddenly become
vulnerable to any slight crosswind, having lost
the grip on the tarmac that helped me to keep it
heading in a straight line. I would have to use the
rudder to stay on course.
Rather than having a complicated arrangement
of control cables, Alex and his team had come
up with a clever solution. The rudder and
elevators would work just like those in a
model aeroplane using an RC (remote control)
handset. The plan was to attach the handset to
the handlebars, where I would have it within
easy reach.
Left: I concentrate hard on
keeping the model glider
‘flying’ straight and level in a
wind-tunnel-style flow of air.
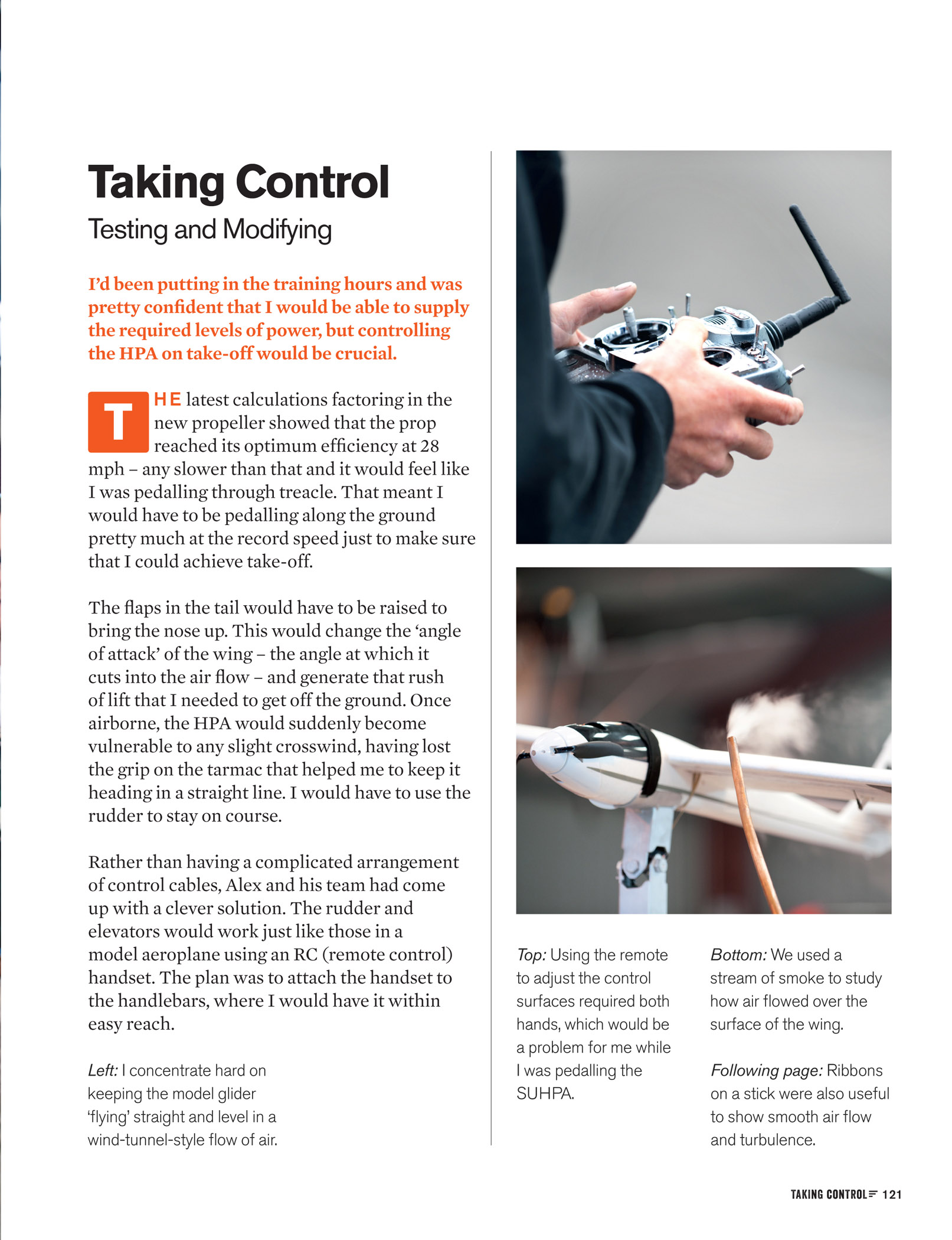
Top: Using the remote
to adjust the control
surfaces required both
hands, which would be
a problem for me while
I was pedalling the
SUHPA.
Bottom: We used a
stream of smoke to study
how air flowed over the
surface of the wing.
Following page: Ribbons
on a stick were also useful
to show smooth air flow
and turbulence.
TAKING CONTROL 121