2: Direct Links
It is a mistake to look too far ahead. Only one link in the chain of destiny can be handled at a time.
—Winston Churchill
Abstract
We consider the problems of reliably transferring data between two computers over a direct link, which might be copper, fiber, or wireless. Problems to be addressed include: encoding bits onto the medium; grouping bits into frames and ensuring frames are received correctly and reliably; flow control; and managing contention on multiaccess links such as Ethernet and Wi-Fi. We also explore the unique challenges of wireless communications, including Wi-Fi, cellular, and Bluetooth, such as the efficient use of spectrum and various forms of interference. Finally, we look at the increasing importance of edge networking as an area of great investment and innovation.
Keywords
Encoding; Ethernet; Cellular networks; 4G/5G; Wireless networks; Wi-Fi; Bluetooth
2.1 Technology Landscape
Before diving into the challenges outlined in the problem statement at the beginning of this chapter, it is helpful to first get a lay of the land, which includes a wide array of link technologies. This is due, in part, to the diverse circumstances under which users are trying to connect their devices.
At one end of the spectrum, network operators that build global networks must deal with links that span hundreds or thousands of kilometers connecting refrigerator-sized routers. At the other end of the spectrum, a typical user encounters links mostly as a way to connect a computer to the existing Internet. Sometimes this link will be a wireless (Wi-Fi) link in a coffee shop; sometimes it is an Ethernet link in an office building or university; sometimes it is a smartphone connected to a cellular network; for an increasingly large slice of the population, it is a fiber optic link provided by an ISP; and many others use some sort of copper wire or cable to connect. Fortunately, there are many common strategies used on these seemingly disparate types of links so that they can all be made reliable and useful to higher layers in the protocol stack. This chapter examines those strategies.
Figure 2.1 illustrates various types of links that might be found in today's Internet. On the left, we see a variety of end user devices ranging from smartphones and tablets to full-fledged computers connected by various means to an ISP. While those links might use different technologies, they all look the same in this picture—a straight line connecting a device to a router. There are links that connect routers together inside the ISP, as well as links that connect the ISP to the “rest of the Internet,” which consists of lots of other ISPs and the hosts to which they connect.
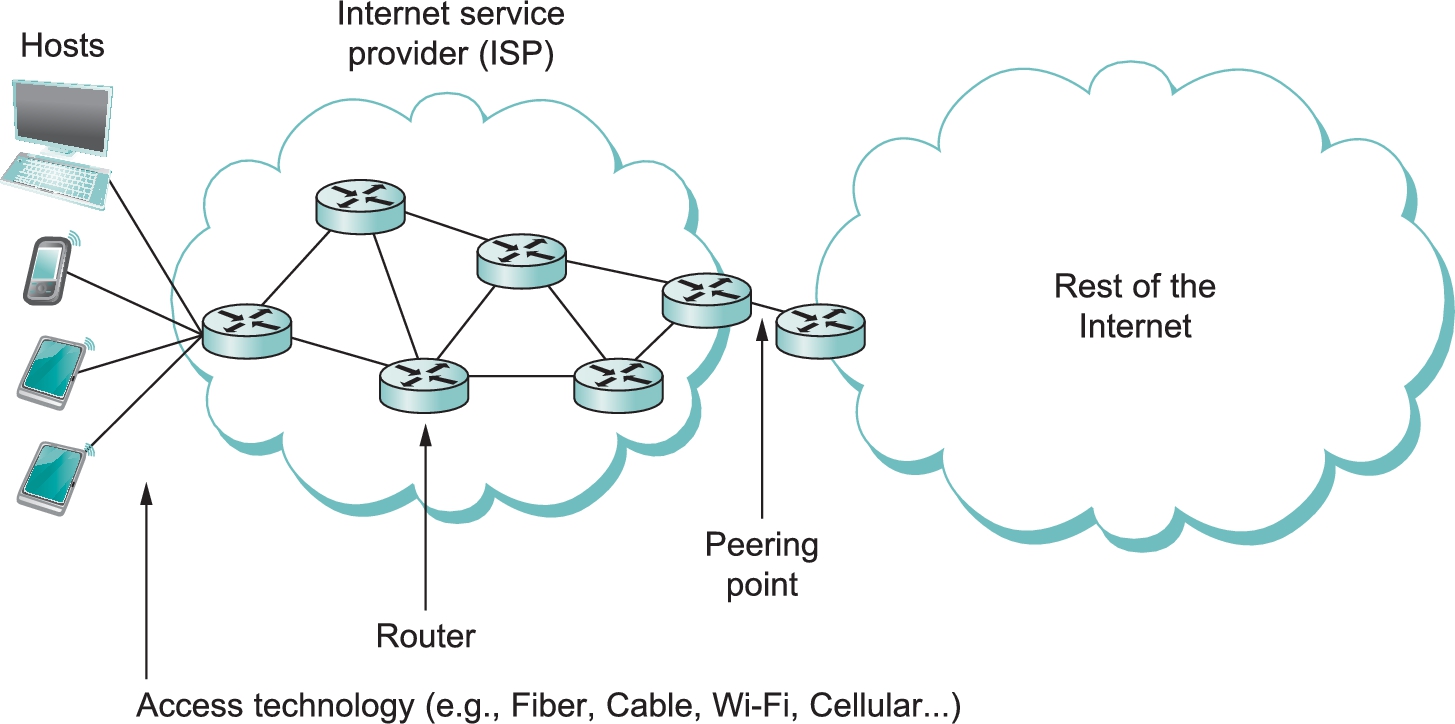
These links all look alike not just because we are not very good artists but because part of the role of a network architecture is to provide a common abstraction of something as complex and diverse as a link. The idea is that your laptop or smartphone does not have to care what sort of link it is connected to—the only thing that matters is that it has a link to the Internet. Similarly, a router does not have to care what sort of link connects it to other routers—it can send a packet on the link with a pretty good expectation that the packet will reach the other end of the link.
How do we make all these different types of links look sufficiently alike to end users and routers? Essentially, we have to deal with all the physical limitations and shortcomings of links that exist in the real world. We sketched out some of these issues in the opening problem statement for this chapter, but before we can discuss these, we need to first introduce some simple physics. All of these links are made of some physical material that can propagate signals, such as radio waves or other sorts of electromagnetic radiation, but what we really want to do is send bits. In the later sections of this chapter, we will look at how to encode bits for transmission on a physical medium, followed by the other issues mentioned above. By the end of this chapter, we will understand how to send complete packets over just about any sort of link, no matter what physical medium is involved.
Shannon–Hartley theorem
There has been an enormous body of work done in the related areas of signal processing and information theory, studying everything from how signals degrade over distance to how much data a given signal can effectively carry. The most notable piece of work in this area is a formula known as the Shannon–Hartley theorem. Simply stated, this theorem gives an upper bound to the capacity of a link, in terms of bits per second (bps), as a function of the signal-to-noise ratio of the link, measured in decibels (dB), and the bandwidth of the channel, measured in hertz (Hz). (As noted previously, “bandwidth” is a bit of an overloaded term in communications; here, we use it to refer to the range of frequencies available for communication.)
As an example, we can apply the Shannon–Hartley theorem to determine the rate at which we can expect to transmit data over a voice-grade phone line without suffering from too high an error rate. A standard voice-grade phone line typically supports a frequency range of 300 Hz to 3300 Hz, a channel bandwidth of 3 kHz.
The theorem is typically given by the following formula:
where C is the achievable channel capacity measured in bits per second, B is the bandwidth of the channel in Hz (3300 Hz − 300 Hz = 3000 Hz), S is the
average signal power, and N is the average noise power. The signal-to-noise ratio (S/N, or SNR) is usually expressed in decibels, related as follows:
Thus, a typical signal-to-noise ratio of 30 dB would imply that S/N = 1000. Thus, we have
which equals approximately 30 kbps, roughly what one could expect from a dial-up modem over a voice-grade telephone line in the 1990s.
The Shannon–Hartley theorem is equally applicable to all sorts of links ranging from wireless to coaxial cable to optical fiber. It should be apparent that there are really only two ways to build a high-capacity link: start with a high-bandwidth channel or achieve a high signal to noise ratio. But even those conditions will not guarantee a high capacity link—it often takes quite a bit of ingenuity on the part of people who design channel coding schemes to achieve the theoretical limits of a channel. This ingenuity is particularly apparent today in wireless links, where there is a great incentive to get the most bits per second from a given amount of wireless spectrum (the channel bandwidth) and signal power level (and hence SNR).
One way to characterize links, then, is by the medium they use—typically, copper wire in some form, such as twisted pair (some Ethernets and landline phones) and coaxial (cable); optical fiber, which is used for both fiber-to-the-home and many long-distance links in the Internet's backbone; or air/free space for wireless links.
Another important link characteristic is the frequency, measured in hertz, with which the electromagnetic waves oscillate. The distance between a pair of adjacent maxima or minima of a wave, typically measured in meters, is called the wave's wavelength. Since all electromagnetic waves travel at the speed of light (which in turn depends on the medium), that speed divided by the wave's frequency is equal to its wavelength. We have already seen the example of a voice-grade telephone line, which carries continuous electromagnetic signals ranging between 300 Hz and 3300 Hz; a 300-Hz wave traveling through copper would have a wavelength of

Generally, electromagnetic waves span a much wider range of frequencies, ranging from radio waves to infrared light, visible light, x-rays, and gamma rays. Figure 2.2 depicts the electromagnetic spectrum and shows which media are commonly used to carry which frequency bands.

What Figure 2.2 does not show is where the cellular network fits in. This is a bit complicated, because the specific frequency bands that are licensed for cellular networks vary around the world, and even further complicated by the fact that network operators often simultaneously support both old/legacy technologies and new/next-generation technologies, each of which occupies a different frequency band. The high-level summary is that traditional cellular technologies range from 700 MHz to 2400 MHz, with new mid-spectrum allocations now happening at 6 GHz, and millimeter-wave (mmWave) allocations opening above 24 GHz. This mmWave band is likely to become an important part of the 5G mobile network.
So far, we understand a link to be a physical medium carrying signals in the form of electromagnetic waves. Such links provide the foundation for transmitting all sorts of information, including the kind of data we are interested in transmitting—binary data (1s and 0s). We say that the binary data are encoded in the signal. The problem of encoding binary data onto electromagnetic signals is a complex topic. To help make the topic more manageable, we can think of it as being divided into two layers. The lower layer is concerned with modulation—varying the frequency, amplitude, or phase of the signal to effect the transmission of information. A simple example of modulation is to vary the power (amplitude) of a single wavelength. Intuitively, this is equivalent to turning a light on and off. Because the issue of modulation is secondary to our discussion of links as a building block for computer networks, we simply assume that it is possible to transmit a pair of distinguishable signals—think of them as a “high” signal and a “low” signal—and we consider only the upper layer, which is concerned with the much simpler problem of encoding binary data onto these two signals. The next section discusses such encodings.
Another way to classify links is in terms of how they are used. Various economic and deployment issues tend to influence where different link types are found. Most consumers interact with the Internet either through wireless networks (which they encounter in coffee shops, airports, universities, etc.) or through so-called last-mile links (or alternatively, access networks) provided by an ISP, as illustrated in Figure 2.1. These link types are summarized in Table 2.1. They typically are chosen because they are cost-effective ways of reaching millions of consumers. DSL (Digital Subscriber Line), for example, is an older technology that was deployed over the existing twisted pair copper wires that already existed for plain old telephone services; G.Fast is a copper-based technology typically used within multidwelling apartment buildings, and PON (Passive Optical Network) is a newer technology that is commonly used to connect homes and businesses over recently deployed fiber.
Table 2.1
| Service | Bandwidth |
|---|---|
| DSL (copper) | up to 100 Mbps |
| G.Fast (copper) | up to 1 Gbps |
| PON (optical) | up to 10 Gbps |
And of course there is also the mobile or cellular network (also referred to as 4G, but which is rapidly evolving into 5G) that connects our mobile devices to the Internet. This technology can also serve as the sole Internet connection into our homes or offices but comes with the added benefit of allowing us to maintain Internet connectivity while moving from place to place.
These example technologies are common options for the last-mile connection to your home or business, but they are not sufficient for building a complete network from scratch. To do that, you will also need some long-distance backbone links to interconnect cities. Modern backbone links are almost exclusively fiber today, and they typically use a technology called SONET (Synchronous Optical Network), which was originally developed to meet the demanding management requirements of telephone carriers.
Finally, in addition to last-mile, backbone, and mobile links, there are the links that you find inside a building or a campus—generally referred to as local area networks (LANs). Ethernet and its wireless cousin, Wi-Fi, are the dominant technologies in this space.
This survey of link types is by no means exhaustive, but it should have given you a taste of the diversity of link types that exist and some of the reasons for that diversity. In the coming sections, we will see how networking protocols can take advantage of that diversity and present a consistent view of the network to higher layers in spite of all the low-level complexity and economic factors.
2.2 Encoding
The first step in turning nodes and links into usable building blocks is to understand how to connect them in such a way that bits can be transmitted from one node to the other. As mentioned in the preceding section, signals propagate over physical links. The task, therefore, is to encode the binary data that the source node wants to send into the signals that the links are able to carry and then to decode the signal back into the corresponding binary data at the receiving node. We ignore the details of modulation and assume we are working with two discrete signals: high and low. In practice, these signals might correspond to two different voltages on a copper-based link, two different power levels on an optical link, or two different amplitudes on a radio transmission.
Most of the functions discussed in this chapter are performed by a network adaptor—a piece of hardware that connects a node to a link. The network adaptor contains a signaling component that actually encodes bits into signals at the sending node and decodes signals into bits at the receiving node. Thus, as illustrated in Figure 2.3, signals travel over a link between two signaling components, and bits flow between network adaptors.

Let us return to the problem of encoding bits onto signals. The obvious thing to do is to map the data value 1 onto the high signal and the data value 0 onto the low signal. This is exactly the mapping used by an encoding scheme called, cryptically enough, nonreturn to zero (NRZ). For example, Figure 2.4 schematically depicts the NRZ-encoded signal (bottom) that corresponds to the transmission of a particular sequence of bits (top).

The problem with NRZ is that a sequence of several consecutive 1s means that the signal stays high on the link for an extended period of time; similarly, several consecutive 0s mean that the signal stays low for a long time. There are two fundamental problems caused by long strings of 1s or 0s. The first is that it leads to a situation known as baseline wander. Specifically, the receiver keeps an average of the signal it has seen so far and then uses this average to distinguish between low and high signals. Whenever the signal is significantly lower than this average, the receiver concludes that it has just seen a 0; likewise, a signal that is significantly higher than the average is interpreted to be a 1. The problem, of course, is that too many consecutive 1s or 0s cause this average to change, making it more difficult to detect a significant change in the signal.
The second problem is that frequent transitions from high to low and vice versa are necessary to enable clock recovery. Intuitively, the clock recovery problem is that both the encoding and decoding processes are driven by a clock—every clock cycle, the sender transmits a bit and the receiver recovers a bit. The sender's and the receiver's clocks have to be precisely synchronized in order for the receiver to recover the same bits the sender transmits. If the receiver's clock is even slightly faster or slower than the sender's clock, then it does not correctly decode the signal. You could imagine sending the clock to the receiver over a separate wire, but this is typically avoided because it makes the cost of cabling twice as high. So, instead, the receiver derives the clock from the received signal—the clock recovery process. Whenever the signal changes, such as on a transition from 1 to 0 or from 0 to 1, then the receiver knows it is at a clock cycle boundary, and it can resynchronize itself. However, a long period of time without such a transition leads to clock drift. Thus, clock recovery depends on having lots of transitions in the signal, no matter what data are being sent.
One approach that addresses this problem, called nonreturn to zero inverted (NRZI), has the sender make a transition from the current signal to encode a 1 and stay at the current signal to encode a 0. This solves the problem of consecutive 1s but obviously does nothing for consecutive 0s. NRZI is illustrated in Figure 2.5. An alternative, called Manchester encoding, does a more explicit job of merging the clock with the signal by transmitting the exclusive OR of the NRZ-encoded data and the clock. (Think of the local clock as an internal signal that alternates from low to high; a low/high pair is considered one clock cycle.) The Manchester encoding is also illustrated in Figure 2.5. Observe that the Manchester encoding results in 0 being encoded as a low-to-high transition and 1 being encoded as a high-to-low transition. Because both 0s and 1s result in a transition to the signal, the clock can be effectively recovered at the receiver. (There is also a variant of the Manchester encoding, called Differential Manchester, in which a 1 is encoded with the first half of the signal equal to the last half of the previous bit's signal and a 0 is encoded with the first half of the signal opposite to the last half of the previous bit's signal.)

The problem with the Manchester encoding scheme is that it doubles the rate at which signal transitions are made on the link, which means that the receiver has half the time to detect each pulse of the signal. The rate at which the signal changes is called the link's baud rate. In the case of the Manchester encoding, the bit rate is half the baud rate, so the encoding is considered only 50% efficient. Keep in mind that if the receiver had been able to keep up with the faster baud rate required by the Manchester encoding in Figure 2.5, then both NRZ and NRZI could have been able to transmit twice as many bits in the same time period.
Note that bit rate is not necessarily less than or equal to the baud rate, as the Manchester encoding suggests. If the modulation scheme is able to utilize (and recognize) four different signals, as opposed to just two (e.g., “high” and “low”), then it is possible to encode 2 bits into each clock interval, resulting in a bit rate that is twice the baud rate. Similarly, being able to modulate among eight different signals means being able to transmit 3 bits per clock interval. In general, it is important to keep in mind we have oversimplified modulation, which is much more sophisticated than transmitting “high” and “low” signals. It is not uncommon to vary a combination of a signal's phase and amplitude, making it possible to encode 16 or even 64 different patterns (often called symbols) during each clock interval. QAM (Quadrature Amplitude Modulation) is a widely used example of such a modulation scheme.
A final encoding that we consider, called 4B/5B, attempts to address the inefficiency of the Manchester encoding without suffering from the problem of having extended durations of high or low signals. The idea of 4B/5B is to insert extra bits into the bit stream so as to break up long sequences of 0s or 1s. Specifically, every 4 bits of actual data are encoded in a 5-bit code that is then transmitted to the receiver; hence, the name 4B/5B. The 5-bit codes are selected in such a way that each one has no more than one leading 0 and no more than two trailing 0s. Thus, when sent back-to-back, no pair of 5-bit codes results in more than three consecutive 0s being transmitted. The resulting 5-bit codes are then transmitted using the NRZI encoding, which explains why the code is only concerned about consecutive 0s—NRZI already solves the problem of consecutive 1s. Note that the 4B/5B encoding results in 80% efficiency.
Table 2.2 gives the 5-bit codes that correspond to each of the 16 possible 4-bit data symbols. Note that since 5 bits are enough to encode 32 different codes, and we are using only 16 of these for data, there are 16 codes left over that we can use for other purposes. Of these, code 11111 is used when the line is idle, code 00000 corresponds to when the line is dead, and 00100 is interpreted to mean halt. Of the remaining 13 codes, 7 are not valid because they violate the “one leading 0, two trailing 0s” rule, and the other 6 represent various control symbols. Some of the framing protocols described later in this chapter make use of these control symbols.
Table 2.2
| 4-bit data symbol | 5-bit code |
|---|---|
| 0000 | 11110 |
| 0001 | 01001 |
| 0010 | 10100 |
| 0011 | 10101 |
| 0100 | 01010 |
| 0101 | 01011 |
| 0110 | 01110 |
| 0111 | 01111 |
| 1000 | 10010 |
| 1001 | 10011 |
| 1010 | 10110 |
| 1011 | 10111 |
| 1100 | 11010 |
| 1101 | 11011 |
| 1110 | 11100 |
| 1111 | 11101 |
2.3 Framing
Now that we have seen how to transmit a sequence of bits over a point-to-point link—from adaptor to adaptor—let us consider the scenario in Figure 2.6. Recall from Chapter 1 that we are focusing on packet-switched networks, which means that blocks of data (called frames at this level), not bit streams, are exchanged between nodes. It is the network adaptor that enables the nodes to exchange frames. When node A wishes to transmit a frame to node B, it tells its adaptor to transmit a frame from the node's memory. This results in a sequence of bits being sent over the link. The adaptor on node B then collects together the sequence of bits arriving on the link and deposits the corresponding frame in B's memory. Recognizing exactly what set of bits constitutes a frame—that is, determining where the frame begins and ends—is the central challenge faced by the adaptor.

There are several ways to address the framing problem. This section uses three different protocols to illustrate the various points in the design space. Note that while we discuss framing in the context of point-to-point links, the problem is a fundamental one that must also be addressed in multiple-access networks like Ethernet and Wi-Fi.
2.3.1 Byte-Oriented Protocols (PPP)
One of the oldest approaches to framing—it has its roots in connecting terminals to mainframes—is to view each frame as a collection of bytes (characters) rather than a collection of bits. Early examples of such byte-oriented protocols are the Binary Synchronous Communication (BISYNC) protocol, developed by IBM in the late 1960s, and the Digital Data Communication Message Protocol (DDCMP), used in Digital Equipment Corporation's DECNET. (Once upon a time, large computer companies like IBM and DEC also built private networks for their customers.) The widely used Point-to-Point Protocol (PPP) is a recent example of this approach.
At a high level, there are two approaches to byte-oriented framing. The first is to use special characters known as sentinel characters to indicate where frames start and end. The idea is to denote the beginning of a frame by sending a special SYN (synchronization) character. The data portion of the frame is then sometimes contained between two more special characters: STX (start of text) and ETX (end of text). BISYNC used this approach. The problem with the sentinel approach, of course, is that one of the special characters might appear in the data portion of the frame. The standard way to overcome this problem is by “escaping” the character by preceding it with a DLE (data-link-escape) character whenever it appears in the body of a frame; the DLE character is also escaped (by preceding it with an extra DLE) in the frame body. (C programmers may notice that this is analogous to the way a quotation mark is escaped by the backslash when it occurs inside a string.) This approach is often called character stuffing because extra characters are inserted in the data portion of the frame.
The alternative to detecting the end of a frame with a sentinel value is to include the number of bytes in the frame at the beginning of the frame, in the frame header. DDCMP used this approach. One danger with this approach is that a transmission error could corrupt the count field, in which case the end of the frame would not be correctly detected. (A similar problem exists with the sentinel-based approach if the ETX field becomes corrupted.) Should this happen, the receiver will accumulate as many bytes as the bad count field indicates and then use the error detection field to determine that the frame is bad. This is sometimes called a framing error. The receiver will then wait until it sees the next SYN character to start collecting the bytes that make up the next frame. It is therefore possible that a framing error will cause back-to-back frames to be incorrectly received.
The Point-to-Point Protocol (PPP), which is commonly used to carry Internet Protocol packets over various sorts of point-to-point links, uses sentinels and character stuffing. The format for a PPP frame is given in Figure 2.7.

This figure is the first of many that you will see in this book that are used to illustrate frame or packet formats, so a few words of explanation are in order. We show a packet as a sequence of labeled fields. Above each field is a number indicating the length of that field in bits. Note that the packets are transmitted beginning with the leftmost field.
The special start-of-text character, denoted as the Flag field, is 01111110. The Address and Control fields usually contain default values and so are uninteresting. The (Protocol) field is used for demultiplexing; it identifies the high-level protocol, such as IP. The frame payload size can be negotiated, but it is 1500 bytes by default. The Checksum field is either 2 (by default) or 4 bytes long. Note that despite its common name, this field is actually a CRC and not a checksum (as described in the next section).
The PPP frame format is unusual in that several of the field sizes are negotiated rather than fixed. This negotiation is conducted by a protocol called the Link Control Protocol (LCP). PPP and LCP work in tandem: LCP sends control messages encapsulated in PPP frames—such messages are denoted by an LCP identifier in the PPP (Protocol) field—and then turns around and changes PPP's frame format based on the information contained in those control messages. LCP is also involved in establishing a link between two peers when both sides detect that communication over the link is possible (e.g., when each optical receiver detects an incoming signal from the fiber to which it connects).
2.3.2 Bit-Oriented Protocols (HDLC)
Unlike byte-oriented protocols, a bit-oriented protocol is not concerned with byte boundaries—it simply views the frame as a collection of bits. These bits might come from some character set, such as ASCII; they might be pixel values in an image; or they could be instructions and operands from an executable file. The Synchronous Data Link Control (SDLC) protocol developed by IBM is an example of a bit-oriented protocol; SDLC was later standardized by the ISO as the High-Level Data Link Control (HDLC) protocol. In the following discussion, we use HDLC as an example; its frame format is given in Figure 2.8.

HDLC denotes both the beginning and the end of a frame with the distinguished bit sequence 01111110. This sequence is also transmitted during any times that the link is idle so that the sender and receiver can keep their clocks synchronized. In this way, both protocols essentially use the sentinel approach. Because this sequence might appear anywhere in the body of the frame—in fact, the bits 01111110 might cross byte boundaries—bit-oriented protocols use the analog of the DLE character, a technique known as bit stuffing.
Bit stuffing in the HDLC protocol works as follows. On the sending side, any time five consecutive 1s have been transmitted from the body of the message (i.e., excluding when the sender is trying to transmit the distinguished 01111110 sequence), the sender inserts a 0 before transmitting the next bit. On the receiving side, should five consecutive 1s arrive, the receiver makes its decision based on the next bit it sees (i.e., the bit following the five 1s). If the next bit is a 0, it must have been stuffed, and so the receiver removes it. If the next bit is a 1, then one of two things is true: either this is the end-of-frame marker or an error has been introduced into the bit stream. By looking at the next bit, the receiver can distinguish between these two cases. If it sees a 0 (i.e., the last 8 bits it has looked at are 01111110), then it is the end-of-frame marker; if it sees a 1 (i.e., the last 8 bits it has looked at are 01111111), then there must have been an error and the whole frame is discarded. In the latter case, the receiver has to wait for the next 01111110 before it can start receiving again, and, as a consequence, there is the potential that the receiver will fail to receive two consecutive frames. Obviously, there are still ways that framing errors can go undetected, such as when an entire spurious end-of-frame pattern is generated by errors, but these failures are relatively unlikely. Robust ways of detecting errors are discussed in a later section.
An interesting characteristic of bit stuffing, as well as character stuffing, is that the size of a frame is dependent on the data that are being sent in the payload of the frame. It is in fact not possible to make all frames exactly the same size, given that the data that might be carried in any frame is arbitrary. (To convince yourself of this, consider what happens if the last byte of a frame's body is the ETX character.) A form of framing that ensures that all frames are of the same size is described in the next subsection.
2.3.3 Clock-Based Framing (SONET)
A third approach to framing is exemplified by the Synchronous Optical Network (SONET) standard. For lack of a widely accepted generic term, we refer to this approach simply as clock-based framing. SONET was first proposed by Bell Communications Research (Bellcore) and then developed under the American National Standards Institute (ANSI) for digital transmission over optical fiber; it has since been adopted by the ITU-T. SONET has for many years been the dominant standard for long-distance transmission of data over optical networks.
An important point to make about SONET before we go any further is that the full specification is substantially larger than this book. Thus, the following discussion will necessarily cover only the high points of the standard. Also, SONET addresses both the framing problem and the encoding problem. It also addresses a problem that is very important for phone companies—the multiplexing of several low-speed links onto one high-speed link. (In fact, much of SONET's design reflects the fact that phone companies have to be concerned with multiplexing large numbers of the 64-kbps channels that traditionally are used for telephone calls.) We begin with SONET's approach to framing and discuss the other issues next.
As with the previously discussed framing schemes, a SONET frame has some special information that tells the receiver where the frame starts and ends; however, that is about as far as the similarities go. Notably, no bit stuffing is used, so that a frame's length does not depend on the data being sent. So the question to ask is “how does the receiver know where each frame starts and ends?” We consider this question for the lowest-speed SONET link, which is known as STS-1 and runs at 51.84 Mbps. An STS-1 frame is shown in Figure 2.9. It is arranged as 9 rows of 90 bytes each, and the first 3 bytes of each row are overhead, with the rest being available for data that are being transmitted over the link. The first 2 bytes of the frame contain a special bit pattern, and it is these bytes that enable the receiver to determine where the frame starts. However, since bit stuffing is not used, there is no reason why this pattern will not occasionally turn up in the payload portion of the frame. To guard against this, the receiver looks for the special bit pattern consistently, hoping to see it appearing once every 810 bytes, since each frame is 9 × 90 = 810 bytes long. When the special pattern turns up in the right place enough times, the receiver concludes that it is in sync and can then interpret the frame correctly.

One of the things we are not describing due to the complexity of SONET is the detailed use of all the other overhead bytes. Part of this complexity can be attributed to the fact that SONET runs across the carrier's optical network, not just over a single link. (Recall that we are glossing over the fact that the carriers implement a network, and we are instead focusing on the fact that we can lease a SONET link from them and then use this link to build our own packet-switched network.) Additional complexity comes from the fact that SONET provides a considerably richer set of services than just data transfer. For example, 64 kbps of a SONET link's capacity is set aside for a voice channel that is used for maintenance.
The overhead bytes of a SONET frame are encoded using NRZ, the simple encoding described in the previous section where 1s are high and 0s are low. However, to ensure that there are plenty of transitions to allow the receiver to recover the sender's clock, the payload bytes are scrambled. This is done by calculating the exclusive OR (XOR) of the data to be transmitted and by the use of a well-known bit pattern. The bit pattern, which is 127 bits long, has plenty of transitions from 1 to 0, so that XORing it with the transmitted data is likely to yield a signal with enough transitions to enable clock recovery.
SONET supports the multiplexing of multiple low-speed links in the following way. A given SONET link runs at one of a finite set of possible rates, ranging from 51.84 Mbps (STS-1) to 39,813,120 Mbps (STS-768).1 Note that all of these rates are integer multiples of STS-1. The significance for framing is that a single SONET frame can contain subframes for multiple lower-rate channels. A second related feature is that each frame is 125 μs long. This means that at STS-1 rates, a SONET frame is 810 bytes long, while at STS-3 rates, each SONET frame is 2430 bytes long. Note the synergy between these two features: 3 × 810 = 2430, meaning that three STS-1 frames fit exactly in a single STS-3 frame.
Intuitively, the STS-N frame can be thought of as consisting of N STS-1 frames, where the bytes from these frames are interleaved; that is, a byte from the first frame is transmitted, then a byte from the second frame is transmitted, and so on. The reason for interleaving the bytes from each STS-N frame is to ensure that the bytes in each STS-1 frame are evenly paced; that is, bytes show up at the receiver at a smooth 51 Mbps rather than all being bunched up during one particular (1/N)th of the 125-μs interval.
Although it is accurate to view an STS-N signal as being used to multiplex N STS-1 frames, the payload from these STS-1 frames can be linked together to form a larger STS-N payload; such a link is denoted STS-Nc (for concatenated). One of the fields in the overhead is used for this purpose. Figure 2.10 schematically depicts concatenation in the case of three STS-1 frames being concatenated into a single STS-3c frame. The significance of a SONET link being designated as STS-3c rather than STS-3 is that in the former case, the user of the link can view it as a single 155.25-Mbps pipe, whereas an STS-3 should really be viewed as three 51.84-Mbps links that happen to share a fiber.

Finally, the preceding description of SONET is overly simplistic in that it assumes that the payload for each frame is completely contained within the frame. (Why would it not be?) In fact, we should view the STS-1 frame just described as simply a placeholder for the frame, where the actual payload may float across frame boundaries. This situation is illustrated in Figure 2.11. Here we see both the STS-1 payload floating across two STS-1 frames and the payload shifted some number of bytes to the right and, therefore, wrapped around. One of the fields in the frame overhead points to the beginning of the payload. The value of this capability is that it simplifies the task of synchronizing the clocks used throughout the carriers' networks, which is something that carriers spend a lot of their time worrying about.

2.4 Error Detection
As discussed in Chapter 1, bit errors are sometimes introduced into frames. This happens, for example, because of electrical interference or thermal noise. Although errors are rare, especially on optical links, some mechanism is needed to detect these errors so that corrective action can be taken. Otherwise, the end user is left wondering why the C program that successfully compiled just a moment ago now suddenly has a syntax error in it, when all that happened in the interim is that it was copied across a network file system.
There is a long history of techniques for dealing with bit errors in computer systems, dating back to at least the 1940s. Hamming and Reed–Solomon codes are two notable examples that were developed for use in punch card readers, when storing data on magnetic disks, and in early core memories. This section describes some of the error detection techniques most commonly used in networking.
Detecting errors is only one part of the problem. The other part is the correction of errors once detected. Two basic approaches can be taken when the recipient of a message detects an error. One is to notify the sender that the message was corrupted so that the sender can retransmit a copy of the message. If bit errors are rare, then in all probability, the retransmitted copy will be error-free. Alternatively, some types of error detection algorithms allow the recipient to reconstruct the correct message even after it has been corrupted; such algorithms rely on error-correcting codes, discussed below.
One of the most common techniques for detecting transmission errors is a technique known as the cyclic redundancy check (CRC). It is used in nearly all the link-level protocols discussed in this chapter. This section outlines the basic CRC algorithm, but before discussing that approach, we first describe the simpler checksum scheme used by several Internet protocols.
The basic idea behind any error detection scheme is to add redundant information to a frame that can be used to determine if errors have been introduced. In the extreme, we could imagine transmitting two complete copies of the data. If the two copies are identical at the receiver, then it is probably the case that both are correct. If they differ, then an error was introduced into one (or both) of them, and they must be discarded. This is a rather poor error detection scheme for two reasons. First, it sends n redundant bits for an n-bit message. Second, many errors will go undetected—any error that happens to corrupt the same bit positions in the first and second copies of the message. In general, the goal of error-detecting codes is to provide a high probability of detecting errors combined with a relatively low number of redundant bits.
Fortunately, we can do a lot better than this simple scheme. In general, we can provide a quite strong error detection capability while sending only k redundant bits for an n-bit message, where k is much smaller than n. On an Ethernet, for example, a frame carrying up to 12,000 bits (1500 bytes) of data requires only a 32-bit CRC code or, as it is commonly expressed, uses CRC-32. Such a code will catch the overwhelming majority of errors, as we will see below.
We say that the extra bits we send are redundant because they add no new information to the message. Instead, they are derived directly from the original message using some well-defined algorithm. Both the sender and the receiver know exactly what that algorithm is. The sender applies the algorithm to the message to generate the redundant bits. It then transmits both the message and those few extra bits. When the receiver applies the same algorithm to the received message, it should (in the absence of errors) come up with the same result as the sender. It compares the result with the one sent to it by the sender. If they match, it can conclude (with high likelihood) that no errors were introduced in the message during transmission. If they do not match, it can be sure that either the message or the redundant bits were corrupted, and it must take appropriate action—that is, discarding the message or correcting it if that is possible.
One note on the terminology for these extra bits follows. In general, they are referred to as error-detecting codes. In specific cases, when the algorithm to create the code is based on addition, they may be called a checksum. We will see that the Internet checksum is appropriately named: it is an error check that uses a summing algorithm. Unfortunately, the word checksum is often used imprecisely to mean any form of error-detecting code, including CRCs. This can be confusing, so we urge you to use the word checksum only to apply to codes that actually do use addition and to use error-detecting code to refer to the general class of codes described in this section.
2.4.1 Internet Checksum Algorithm
Our first approach to error detection is exemplified by the Internet checksum. Although it is not used at the link level, it nevertheless provides the same sort of functionality as CRCs, so we discuss it here.
The idea behind the Internet checksum is very simple—you add up all the words that are transmitted and then transmit the result of that sum. The result is the checksum. The receiver performs the same calculation on the received data and compares the result with the received checksum. If any transmitted data, including the checksum itself, is corrupted, then the results will not match, so the receiver knows that an error occurred.
You can imagine many different variations on the basic idea of a checksum. The exact scheme used by the Internet protocols works as follows. Consider the data being checksummed as a sequence of 16-bit integers. Add them together using 16-bit ones' complement arithmetic (explained below) and then take the ones' complement of the result. That 16-bit number is the checksum.
In ones' complement arithmetic, a negative integer (−x) is represented as the complement of x; that is, each bit of x is inverted. When adding numbers in ones' complement arithmetic, a carryout from the most significant bit needs to be added to the result. Consider, for example, the addition of −5 and −3 in ones' complement arithmetic on 4-bit integers: +5 is 0101, so −5 is 1010; +3 is 0011, so −3 is 1100. If we add 1010 and 1100, ignoring the carry, we get 0110. In ones' complement arithmetic, the fact that this operation caused a carry from the most significant bit causes us to increment the result, giving 0111, which is the ones' complement representation of −8 (obtained by inverting the bits in 1000), as we would expect.
The following routine gives a straightforward implementation of the Internet's checksum algorithm. The count argument gives the length of buf measured in 16-bit units. The routine assumes that buf has already been padded with 0s to a 16-bit boundary.
u_short
cksum(u_short *buf, int count)
{
register u_long sum = 0;
while (count--)
{
sum += *buf++;
if (sum & 0xFFFF0000)
{
/* carry occurred, so wrap around */
sum &= 0xFFFF;
sum++;
}
}
return ~(sum & 0xFFFF);
}This code ensures that the calculation uses ones' complement arithmetic rather than the twos' complement that is used in most machines. Note the if statement inside the while loop. If there is a carry into the top 16 bits of sum, then we increment sum just as in the previous example.
Compared to our repetition code, this algorithm scores well for using a small number of redundant bits—only 16 for a message of any length—but it does not score extremely well for strength of error detection. For example, a pair of single-bit errors, one of which increments a word and one of which decrements another word by the same amount, will go undetected. The reason for using an algorithm like this in spite of its relatively weak protection against errors (compared to a CRC, for example) is simple: this algorithm is much easier to implement in software. Experience has suggested that a checksum of this form was adequate, but one reason it is adequate is that this checksum is the last line of defense in an end-to-end protocol. The majority of errors are picked up by stronger error detection algorithms, such as CRCs, at the link level.
Simple probability calculations
When dealing with network errors and other unlikely (we hope) events, we often have use for simple back-of-the-envelope probability estimates. A useful approximation is that if two independent events have small probabilities p and q, then the probability of either event is ![]() . The exact answer is
. The exact answer is ![]() , but for small probabilities like
, but for small probabilities like ![]() , our estimate gives us 0.02, while the exact value is .0199. Close enough.
, our estimate gives us 0.02, while the exact value is .0199. Close enough.
For a simple application of this, suppose that the per-bit error rate on a link is 1 in 107. Now suppose we are interested in estimating the probability of at least 1 bit in a 10,000-bit packet being errored. Using the above approximation repeatedly over all the bits, we can say that we are interested in the probability of either the first bit being errored, or the second bit, or the third, etc. Assuming bit errors are all independent (which they are not), we can therefore estimate that the probability of at least one error in a 10,000-bit (104 bits) packet is 104 × 10−7 = 10−3. The exact answer, computed as 1 − P(no errors), would be 1 − (1 − 10−7)10,000 = 0.00099950.
For a slightly more complex application, we compute the probability of exactly two errors in such a packet; this is the probability of an error that would sneak past a 1-parity-bit checksum. If we consider two particular bits in the packet, say, bits i and j, the probability of those exact bits being errored is 10−7 × 10−7. The total number of possible bit pairs in the packet is roughly 5 × 107, so again using the approximation of repeatedly adding the probabilities of many rare events (in this case, of any possible bit pair being errored), our total probability of at least two errored bits is 5 × 107 × 10−14 = 5 × 10−7.
2.4.2 Cyclic Redundancy Check
It should be clear by now that a major goal in designing error detection algorithms is to maximize the probability of detecting errors using only a small number of redundant bits. Cyclic redundancy checks use some fairly powerful mathematics to achieve this goal. For example, a 32-bit CRC gives strong protection against common bit errors in messages that are thousands of bytes long. The theoretical foundation of the cyclic redundancy check is rooted in a branch of mathematics called finite fields. While this may sound daunting, the basic ideas can be easily understood.
To start, think of an (![]() )-bit message as being represented by an n degree polynomial, that is, a polynomial whose highest-order term is
)-bit message as being represented by an n degree polynomial, that is, a polynomial whose highest-order term is ![]() . The message is represented by a polynomial by using the value of each bit in the message as the coefficient for each term in the polynomial, starting with the most significant bit to represent the highest-order term. For example, an 8-bit message consisting of the bits 10011010 corresponds to the polynomial
. The message is represented by a polynomial by using the value of each bit in the message as the coefficient for each term in the polynomial, starting with the most significant bit to represent the highest-order term. For example, an 8-bit message consisting of the bits 10011010 corresponds to the polynomial
We can thus think of a sender and a receiver as exchanging polynomials with each other.
For the purposes of calculating a CRC, a sender and receiver have to agree on a divisor polynomial, ![]() , which is a polynomial of degree k. For example, suppose
, which is a polynomial of degree k. For example, suppose ![]() . In this case,
. In this case, ![]() . The answer to the question “where did
. The answer to the question “where did ![]() come from?” is, in most practical cases, “you look it up in a book.” In fact, the choice of
come from?” is, in most practical cases, “you look it up in a book.” In fact, the choice of ![]() has a significant impact on what types of errors can be reliably detected, as we discuss below. There are a handful of divisor polynomials that are very good choices for various environments, and the exact choice is normally made as part of the protocol design. For example, the Ethernet standard uses a well-known polynomial of degree 32.
has a significant impact on what types of errors can be reliably detected, as we discuss below. There are a handful of divisor polynomials that are very good choices for various environments, and the exact choice is normally made as part of the protocol design. For example, the Ethernet standard uses a well-known polynomial of degree 32.
When a sender wishes to transmit a message ![]() that is n + 1 bits long, what is actually sent is the (n + 1)-bit message plus k bits. We call the complete transmitted message, including the redundant bits,
that is n + 1 bits long, what is actually sent is the (n + 1)-bit message plus k bits. We call the complete transmitted message, including the redundant bits, ![]() . What we are going to do is contrive to make the polynomial representing
. What we are going to do is contrive to make the polynomial representing ![]() exactly divisible by
exactly divisible by ![]() ; we explain how this is achieved below. If
; we explain how this is achieved below. If ![]() is transmitted over a link and there are no errors introduced during transmission, then the receiver should be able to divide
is transmitted over a link and there are no errors introduced during transmission, then the receiver should be able to divide ![]() by
by ![]() exactly, leaving a remainder of zero. On the other hand, if some error is introduced into
exactly, leaving a remainder of zero. On the other hand, if some error is introduced into ![]() during transmission, then in all likelihood, the received polynomial will no longer be exactly divisible by
during transmission, then in all likelihood, the received polynomial will no longer be exactly divisible by ![]() , and thus the receiver will obtain a nonzero remainder, implying that an error has occurred.
, and thus the receiver will obtain a nonzero remainder, implying that an error has occurred.
It will help to understand the following if you know a little about polynomial arithmetic; it is just slightly different from normal integer arithmetic. We are dealing with a special class of polynomial arithmetic here, where coefficients may be only one or zero, and operations on the coefficients are performed using modulo 2 arithmetic. This is referred to as “polynomial arithmetic modulo 2.” Since this is a networking book, not a mathematics text, let us focus on the key properties of this type of arithmetic for our purposes (which we ask you to accept on faith):
- ■ Any polynomial
 can be divided by a divisor polynomial
can be divided by a divisor polynomial  if is of higher degree than .
if is of higher degree than . - ■ Any polynomial can be divided once by a divisor polynomial if is of the same degree as .
- ■ The remainder obtained when is divided by is obtained by performing the exclusive OR (XOR) operation on each pair of matching coefficients.
For example, the polynomial ![]() can be divided by
can be divided by ![]() (because they are both of degree 3) and the remainder would be
(because they are both of degree 3) and the remainder would be ![]() (obtained by XORing the coefficients of each term). In terms of messages, we could say that 1001 can be divided by 1101 and leaves a remainder of 0100. You should be able to see that the remainder is just the bitwise exclusive OR of the two messages.
(obtained by XORing the coefficients of each term). In terms of messages, we could say that 1001 can be divided by 1101 and leaves a remainder of 0100. You should be able to see that the remainder is just the bitwise exclusive OR of the two messages.
Now that we know the basic rules for dividing polynomials, we are able to do long division, which is necessary to deal with longer messages. An example appears below.
Recall that we wanted to create a polynomial for transmission that is derived from the original message ![]() , is k bits longer than
, is k bits longer than ![]() , and is exactly divisible by
, and is exactly divisible by ![]() . We can do this in the following way:
. We can do this in the following way:
- 1. Multiply
 by
by  ; that is, add k zeros at the end of the message. Call this zero-extended message
; that is, add k zeros at the end of the message. Call this zero-extended message  .
. - 2. Divide by and find the remainder.
- 3. Subtract the remainder from .
It should be obvious that what is left at this point is a message that is exactly divisible by ![]() . We may also note that the resulting message consists of
. We may also note that the resulting message consists of ![]() followed by the remainder obtained in step 2, because when we subtracted the remainder (which can be no more than k bits long), we were just XORing it with the k zeros added in step 1. This part will become clearer with an example.
followed by the remainder obtained in step 2, because when we subtracted the remainder (which can be no more than k bits long), we were just XORing it with the k zeros added in step 1. This part will become clearer with an example.
Consider the message ![]() , or 10011010. We begin by multiplying by
, or 10011010. We begin by multiplying by ![]() , since our divisor polynomial is of degree 3. This gives 10011010000. We divide this by
, since our divisor polynomial is of degree 3. This gives 10011010000. We divide this by ![]() , which corresponds to 1101 in this case. Figure 2.12 shows the polynomial long division operation. Given the rules of polynomial arithmetic described above, the long division operation proceeds much as it would if we were dividing integers. Thus, in the first step of our example, we see that the divisor 1101 divides once into the first 4 bits of the message (1001), since they are of the same degree, and leaves a remainder of 100 (1101 XOR 1001). The next step is to bring down a digit from the message polynomial until we get another polynomial with the same degree as
, which corresponds to 1101 in this case. Figure 2.12 shows the polynomial long division operation. Given the rules of polynomial arithmetic described above, the long division operation proceeds much as it would if we were dividing integers. Thus, in the first step of our example, we see that the divisor 1101 divides once into the first 4 bits of the message (1001), since they are of the same degree, and leaves a remainder of 100 (1101 XOR 1001). The next step is to bring down a digit from the message polynomial until we get another polynomial with the same degree as ![]() , in this case 1001. We calculate the remainder again (100) and continue until the calculation is complete. Note that the “result” of the long division, which appears at the top of the calculation, is not really of much interest—it is the remainder at the end that matters.
, in this case 1001. We calculate the remainder again (100) and continue until the calculation is complete. Note that the “result” of the long division, which appears at the top of the calculation, is not really of much interest—it is the remainder at the end that matters.

You can see from the very bottom of Figure 2.12 that the remainder of the example calculation is 101. So we know that 10011010000 minus 101 would be exactly divisible by ![]() , and this is what we send. The minus operation in polynomial arithmetic is the logical XOR operation, so we actually send 10011010101. As noted above, this turns out to be just the original message with the remainder from the long division calculation appended to it. The recipient divides the received polynomial by
, and this is what we send. The minus operation in polynomial arithmetic is the logical XOR operation, so we actually send 10011010101. As noted above, this turns out to be just the original message with the remainder from the long division calculation appended to it. The recipient divides the received polynomial by ![]() and, if the result is 0, concludes that there were no errors. If the result is nonzero, it may be necessary to discard the corrupted message; with some codes, it may be possible to correct a small error (e.g., if the error affected only 1 bit). A code that enables error correction is called an error-correcting code (ECC).
and, if the result is 0, concludes that there were no errors. If the result is nonzero, it may be necessary to discard the corrupted message; with some codes, it may be possible to correct a small error (e.g., if the error affected only 1 bit). A code that enables error correction is called an error-correcting code (ECC).
Now we will consider the question of where the polynomial ![]() comes from. Intuitively, the idea is to select this polynomial so that it is very unlikely to divide evenly into a message that has errors introduced into it. If the transmitted message is
comes from. Intuitively, the idea is to select this polynomial so that it is very unlikely to divide evenly into a message that has errors introduced into it. If the transmitted message is ![]() , we may think of the introduction of errors as the addition of another polynomial
, we may think of the introduction of errors as the addition of another polynomial ![]() , so the recipient sees
, so the recipient sees ![]() . The only way that an error could slip by undetected would be if the received message could be evenly divided by
. The only way that an error could slip by undetected would be if the received message could be evenly divided by ![]() , and since we know that
, and since we know that ![]() can be evenly divided by
can be evenly divided by ![]() , this could only happen if
, this could only happen if ![]() can be divided evenly by
can be divided evenly by ![]() . The trick is to pick
. The trick is to pick ![]() so that this is very unlikely for common types of errors.
so that this is very unlikely for common types of errors.
One common type of error is a single-bit error, which can be expressed as ![]() when it affects bit position i. If we select
when it affects bit position i. If we select ![]() such that the first and the last term (that is, the
such that the first and the last term (that is, the ![]() and
and ![]() terms) are nonzero, then we already have a two-term polynomial that cannot divide evenly into the one term
terms) are nonzero, then we already have a two-term polynomial that cannot divide evenly into the one term ![]() . Such a
. Such a ![]() can, therefore, detect all single-bit errors. In general, it is possible to prove that the following types of errors can be detected by a
can, therefore, detect all single-bit errors. In general, it is possible to prove that the following types of errors can be detected by a ![]() with the stated properties:
with the stated properties:
- ■ all single-bit errors, as long as the and
 terms have nonzero coefficients;
terms have nonzero coefficients; - ■ all double-bit errors, as long as has a factor with at least three terms;
- ■ any odd number of errors, as long as contains the factor
 ;
;
We have mentioned that it is possible to use codes that not only detect the presence of errors but also enable errors to be corrected. Since the details of such codes require yet more complex mathematics than that required to understand CRCs, we will not dwell on them here. However, it is worth considering the merits of correction versus detection.
At first glance, it would seem that correction is always better, since with detection, we are forced to throw away the message and, in general, ask for another copy to be transmitted. This uses up bandwidth and may introduce latency while waiting for the retransmission. However, there is a downside to correction, as it generally requires a greater number of redundant bits to send an error-correcting code that is as strong (that is, able to cope with the same range of errors) as a code that only detects errors. Thus, while error detection requires more bits to be sent when errors occur, error correction requires more bits to be sent all the time. As a result, error correction tends to be most useful when (1) errors are quite probable, as they may be, for example, in a wireless environment, or (2) the cost of retransmission is too high, for example, because of the latency involved retransmitting a packet over a satellite link.
The use of error-correcting codes in networking is sometimes referred to as forward error correction (FEC) because the correction of errors is handled “in advance” by sending extra information rather than waiting for errors to happen and dealing with them later by retransmission. FEC is commonly used in wireless networks such as 802.11.
- ■ any “burst” error (i.e., sequence of consecutive errored bits) for which the length of the burst is less than k bits. (Most burst errors of length greater than k bits can also be detected.)
Six versions of ![]() are widely used in link-level protocols. For example, Ethernet uses CRC-32, which is defined as follows:
are widely used in link-level protocols. For example, Ethernet uses CRC-32, which is defined as follows:
- ■ CRC-32 =
 .
.
Finally, we note that the CRC algorithm, while seemingly complex, is easily implemented in hardware using a k-bit shift register and XOR gates. The number of bits in the shift register equals the degree of the generator polynomial (k). Figure 2.13 shows the hardware that would be used for the generator ![]() from our previous example. The message is shifted in from the left, beginning with the most significant bit and ending with the string of k zeros that is attached to the message, just as in the long division example. When all the bits have been shifted in and appropriately XORed, the register contains the remainder—that is, the CRC (most significant bit on the right). The position of the XOR gates is determined as follows: if the bits in the shift register are labeled 0 through
from our previous example. The message is shifted in from the left, beginning with the most significant bit and ending with the string of k zeros that is attached to the message, just as in the long division example. When all the bits have been shifted in and appropriately XORed, the register contains the remainder—that is, the CRC (most significant bit on the right). The position of the XOR gates is determined as follows: if the bits in the shift register are labeled 0 through ![]() , from left to right, then put an XOR gate in front of bit n if there is a term
, from left to right, then put an XOR gate in front of bit n if there is a term ![]() in the generator polynomial. Thus, we see an XOR gate in front of positions 0 and 2 for the generator
in the generator polynomial. Thus, we see an XOR gate in front of positions 0 and 2 for the generator ![]() .
.

2.5 Reliable Transmission
As we saw in the previous section, frames are sometimes corrupted while in transit, with an error code like CRC used to detect such errors. While some error codes are strong enough also to correct errors, in practice, the overhead is typically too large to handle the range of bit and burst errors that can be introduced on a network link. Even when error-correcting codes are used (e.g., on wireless links), some errors will be too severe to be corrected. As a result, some corrupt frames must be discarded. A link-level protocol that wants to deliver frames reliably must somehow recover from these discarded (lost) frames.
It is worth noting that reliability is a function that may be provided at the link level, but many modern link technologies omit this function. Furthermore, reliable delivery is frequently provided at higher levels, including both transport and, sometimes, the application layer. Exactly where it should be provided is a matter of some debate and depends on many factors. We describe the basics of reliable delivery here, since the principles are common across layers, but you should be aware that we are not just talking about a link-layer function.
Reliable delivery is usually accomplished using a combination of two fundamental mechanisms—acknowledgments and timeouts. An acknowledgment (ACK for short) is a small control frame that a protocol sends back to its peer saying that it has received an earlier frame. By control frame, we mean a header without any data, although a protocol can piggyback an ACK on a data frame it just happens to be sending in the opposite direction. The receipt of an acknowledgment indicates to the sender of the original frame that its frame was successfully delivered. If the sender does not receive an acknowledgment after a reasonable amount of time, then it retransmits the original frame. This action of waiting a reasonable amount of time is called a timeout.
The general strategy of using acknowledgments and timeouts to implement reliable delivery is sometimes called automatic repeat request (abbreviated ARQ). This section describes three different ARQ algorithms using generic language; that is, we do not give detailed information about a particular protocol's header fields.
2.5.1 Stop-and-Wait
The simplest ARQ scheme is the stop-and-wait algorithm. The idea of stop-and-wait is straightforward: after transmitting one frame, the sender waits for an acknowledgment before transmitting the next frame. If the acknowledgment does not arrive after a certain period of time, the sender times out and retransmits the original frame.
Figure 2.14 illustrates timelines for four different scenarios that result from this basic algorithm. The sending side is represented on the left, the receiving side is depicted on the right, and time flows from top to bottom. Figure 2.14(a) shows the situation in which the ACK is received before the timer expires; (b) and (c) show the situation in which the original frame and the ACK, respectively, are lost; and (d) shows the situation in which the timeout fires too soon. Recall that by “lost” we mean that the frame was corrupted while in transit, that this corruption was detected by an error code on the receiver, and that the frame was subsequently discarded.

The packet timelines shown in this section are examples of a frequently used tool in teaching, explaining, and designing protocols. They are useful because they capture visually the behavior over time of a distributed system—something that can be quite hard to analyze. When designing a protocol, you often have to be prepared for the unexpected—a system crashes, a message gets lost, or something that you expected to happen quickly turns out to take a long time. These sorts of diagrams can often help us understand what might go wrong in such cases and thus help a protocol designer be prepared for every eventuality.
There is one important subtlety in the stop-and-wait algorithm. Suppose the sender sends a frame and the receiver acknowledges it, but the acknowledgment is either lost or delayed in arriving. This situation is illustrated in timelines (c) and (d) of Figure 2.14. In both cases, the sender times out and retransmits the original frame, but the receiver will think that it is the next frame, since it correctly received and acknowledged the first frame. This has the potential to cause duplicate copies of a frame to be delivered. To address this problem, the header for a stop-and-wait protocol usually includes a 1-bit sequence number—that is, the sequence number can take on the values 0 and 1—and the sequence numbers used for each frame alternate, as illustrated in Figure 2.15. Thus, when the sender retransmits frame 0, the receiver can determine that it is seeing a second copy of frame 0 rather than the first copy of frame 1 and therefore can ignore it (the receiver still acknowledges it, in case the first ACK was lost).

The main shortcoming of the stop-and-wait algorithm is that it allows the sender to have only one outstanding frame on the link at a time, and this may be far below the link's capacity. Consider, for example, a 1.5-Mbps link with a 45-ms round-trip time. This link has a delay × bandwidth product of 67.5 kbits, or approximately 8 kB. Since the sender can send only one frame per RTT, and assuming a frame size of 1 kB, this implies a maximum sending rate of Bits-Per-Frame / Time-Per-Frame = 1024 × 8 / 0.045 = 182 kbps, or about one-eighth of the link's capacity. To use the link fully, then, we would like the sender to be able to transmit up to eight frames before having to wait for an acknowledgment.
2.5.2 Sliding Window
Consider again the scenario in which the link has a delay × bandwidth product of 8 kB and frames are 1 kB in size. We would like the sender to be ready to transmit the ninth frame at pretty much the same moment that the ACK for the first frame arrives. The algorithm that allows us to do this is called sliding window, and an illustrative timeline is given in Figure 2.16.

The Sliding Window Algorithm
The sliding window algorithm works as follows. First, the sender assigns a sequence number, denoted SeqNum, to each frame. For now, let us ignore the fact that SeqNum is implemented by a finite-size header field and instead assume that it can grow infinitely large. The sender maintains three variables: the send window size, denoted SWS, gives the upper bound on the number of outstanding (unacknowledged) frames that the sender can transmit; LAR denotes the sequence number of the last acknowledgment received; and LFS denotes the sequence number of the last frame sent. The sender also maintains the following invariant:
LFS - LAR ⩽ SWS
This situation is illustrated in Figure 2.17.

When an acknowledgment arrives, the sender moves LAR to the right, thereby allowing the sender to transmit another frame. Also, the sender associates a timer with each frame it transmits, and it retransmits the frame should the timer expire before an ACK is received. Note that the sender has to be willing to buffer up to SWS frames, since it must be prepared to retransmit them until they are acknowledged.
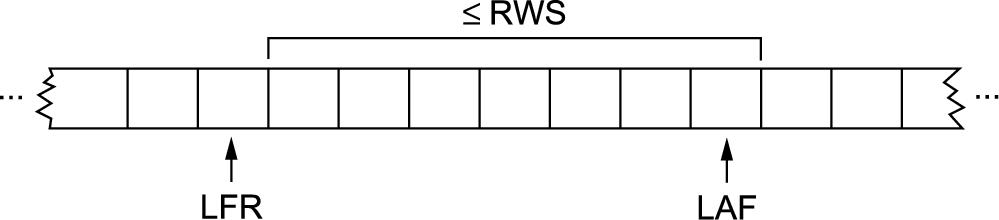
The receiver maintains the following three variables: the receive window size, denoted RWS, gives the upper bound on the number of out-of-order frames that the receiver is willing to accept; LAF denotes the sequence number of the largest acceptable frame; and LFR denotes the sequence number of the last frame received. The receiver also maintains the following invariant:
LAF - LFR ⩽ RWS
This situation is illustrated in Figure 2.18.
When a frame with sequence number SeqNum arrives, the receiver takes the following action. If SeqNum ⩽ LFR or SeqNum > LAF, then the frame is outside the receiver's window and it is discarded. If LFR < SeqNum ⩽ LAF, then the frame is within the receiver's window and it is accepted. Now the receiver needs to decide whether or not to send an ACK. Let SeqNumToAck denote the largest sequence number not yet acknowledged, such that all frames with sequence numbers less than or equal to SeqNumToAck have been received. The receiver acknowledges the receipt of SeqNumToAck, even if higher numbered packets have been received. This acknowledgment is said to be cumulative. It then sets LFR = SeqNumToAck and adjusts LAF = LFR + RWS.
For example, suppose LFR = 5 (i.e., the last ACK the receiver sent was for sequence number 5), and RWS = 4. This implies that LAF = 9. Should frames 7 and 8 arrive, they will be buffered because they are within the receiver's window. However, no ACK needs to be sent since frame 6 has yet to arrive. Frames 7 and 8 are said to have arrived out of order. (Technically, the receiver could resend an ACK for frame 5 when frames 7 and 8 arrive.) Should frame 6 then arrive—perhaps it is late because it was lost the first time and had to be retransmitted, or perhaps it was simply delayed—the receiver acknowledges frame 8, bumps LFR to 8, and sets LAF to 12.2 If frame 6 was in fact lost, then a timeout will have occurred at the sender, causing it to retransmit frame 6.
We observe that when a timeout occurs, the amount of data in transit decreases, since the sender is unable to advance its window until frame 6 is acknowledged. This means that when packet losses occur, this scheme is no longer keeping the pipe full. The longer it takes to notice that a packet loss has occurred, the more severe this problem becomes.
Note that in this example, the receiver could have sent a negative acknowledgment (NACK) for frame 6 as soon as frame 7 arrived. However, this is unnecessary, since the sender's timeout mechanism is sufficient to catch this situation, and sending NACKs adds additional complexity to the receiver. Also, as we mentioned, it would have been legitimate to send additional acknowledgments of frame 5 when frames 7 and 8 arrived; in some cases, a sender can use duplicate ACKs as a clue that a frame was lost. Both approaches help to improve performance by allowing early detection of packet losses.
Yet another variation on this scheme would be to use selective acknowledgments. That is, the receiver could acknowledge exactly those frames it has received rather than just the highest numbered frame received in order. So, in the above example, the receiver could acknowledge the receipt of frames 7 and 8. Giving more information to the sender makes it potentially easier for the sender to keep the pipe full but adds complexity to the implementation.
The sending window size is selected according to how many frames we want to have outstanding on the link at a given time; SWS is easy to compute for a given delay × bandwidth product. On the other hand, the receiver can set RWS to whatever it wants. Two common settings are RWS = 1, which implies that the receiver will not buffer any frames that arrive out of order, and RWS = SWS, which implies that the receiver can buffer any of the frames the sender transmits. It makes no sense to set RWS > SWS, since it is impossible for more than SWS frames to arrive out of order.
Finite Sequence Numbers and Sliding Window
We now return to the one simplification we introduced into the algorithm—our assumption that sequence numbers can grow infinitely large. In practice, of course, a frame's sequence number is specified in a header field of some finite size. For example, a 3-bit field means that there are eight possible sequence numbers, 0..7. This makes it necessary to reuse sequence numbers or, stated another way, sequence numbers wrap around. This introduces the problem of being able to distinguish between different incarnations of the same sequence numbers, which implies that the number of possible sequence numbers must be larger than the number of outstanding frames allowed. For example, stop-and-wait allowed one outstanding frame at a time and had two distinct sequence numbers.
Suppose we have one more number in our space of sequence numbers than we have potentially outstanding frames; that is, SWS ⩽ MaxSeqNum - 1, where MaxSeqNum is the number of available sequence numbers. Is this sufficient? The answer depends on RWS. If RWS = 1, then MaxSeqNum ⩾ SWS + 1 is sufficient. If RWS is equal to SWS, then having a MaxSeqNum just one greater than the sending window size is not good enough. To see this, consider the situation in which we have the eight sequence numbers 0 through 7, and SWS = RWS = 7. Suppose the sender transmits frames 0..6, they are successfully received, but the ACKs are lost. The receiver is now expecting frames 7, 0..5, but the sender times out and sends frames 0..6. Unfortunately, the receiver is expecting the second incarnation of frames 0..5 but gets the first incarnation of these frames. This is exactly the situation we wanted to avoid.
It turns out that the sending window size can be no more than half as big as the number of available sequence numbers when RWS = SWS, or stated more precisely,
SWS < (MaxSeqNum + 1)/ 2
Intuitively, what this is saying is that the sliding window protocol alternates between the two halves of the sequence number space, just as stop-and-wait alternates between sequence numbers 0 and 1. The only difference is that it continually slides between the two halves rather than discretely alternating between them.
Note that this rule is specific to the situation where RWS = SWS. We leave it as an exercise to determine the more general rule that works for arbitrary values of RWS and SWS. Also note that the relationship between the window size and the sequence number space depends on an assumption that is so obvious that it is easy to overlook, namely, that frames are not reordered in transit. This cannot happen on a direct point-to-point link, since there is no way for one frame to overtake another during transmission. However, we will see the sliding window algorithm used in a different environments, and we will need to devise another rule.
Implementation of Sliding Window
The following routines illustrate how we might implement the sending and receiving sides of the sliding window algorithm. The routines are taken from a working protocol named, appropriately enough, Sliding Window Protocol (SWP). So as not to concern ourselves with the adjacent protocols in the protocol graph, we denote the protocol sitting above SWP as the high-level protocol (HLP) and the protocol sitting below SWP as the link-level protocol (LLP).
We start by defining a pair of data structures. First, the frame header is very simple: it contains a sequence number (SeqNum) and an acknowledgment number (AckNum). It also contains a Flags field that indicates whether the frame is an ACK or carries data.
typedef u_char SwpSeqno;
typedef struct {
SwpSeqno SeqNum; /* sequence number of this frame */
SwpSeqno AckNum; /* ack of received frame */
u_char Flags; /* up to 8 bits worth of flags */
} SwpHdr;Next, the state of the sliding window algorithm has the following structure. For the sending side of the protocol, this state includes variables LAR and LFS, as described earlier in this section, as well as a queue that holds frames that have been transmitted but not yet acknowledged (sendQ). The sending state also includes a counting semaphore called sendWindowNotFull. We will see how this is used below, but generally, a semaphore is a synchronization primitive that supports semWait and semSignal operations. Every invocation of semSignal increments the semaphore by 1, and every invocation of semWait decrements s by 1, with the calling process blocked (suspended) should decrementing the semaphore cause its value to become less than 0. A process that is blocked during its call to semWait will be allowed to resume as soon as enough semSignal operations have been performed to raise the value of the semaphore above 0.
For the receiving side of the protocol, the state includes the variable NFE. This is the next frame expected, the frame with a sequence number one more that the last frame received (LFR), described earlier in this section. There is also a queue that holds frames that have been received out of order (recvQ). Finally, although not shown, the sender and receiver sliding window sizes are defined by constants SWS and RWS, respectively.
typedef struct {
/* sender side state: */
SwpSeqno LAR; /* seqno of last ACK received */
SwpSeqno LFS; /* last frame sent */
Semaphore sendWindowNotFull;
SwpHdr hdr; /* pre-initialized header */
struct sendQ_slot {
Event timeout; /* event associated with send
-timeout */
Msg msg;
} sendQ[SWS];
/* receiver side state: */
SwpSeqno NFE; /* seqno of next frame expected */
struct recvQ_slot {
int received; /* is msg valid? */
Msg msg;
} recvQ[RWS];
} SwpState;The sending side of SWP is implemented by the procedure sendSWP. This routine is rather simple. First, semWait causes this process to block on a semaphore until it is OK to send another frame. Once allowed to proceed, sendSWP sets the sequence number in the frame's header, saves a copy of the frame in the transmit queue (sendQ), schedules a timeout event to handle the case in which the frame is not acknowledged, and sends the frame to the next-lower-level protocol, which we denote as LINK.
One detail worth noting is the call to store_swp_hdr just before the call to msgAddHdr. This routine translates the C structure that holds the SWP header (state->hdr) into a byte string that can be safely attached to the front of the message (hbuf). This routine (not shown) must translate each integer field in the header into network byte order and remove any padding that the compiler has added to the C structure. The issue of byte order is a nontrivial issue, but for now, it is enough to assume that this routine places the most significant bit of a multiword integer in the byte with the highest address.
Another piece of complexity in this routine is the use of semWait and the sendWindowNotFull semaphore. sendWindowNotFull is initialized to the size of the sender's sliding window, SWS (this initialization is not shown). Each time the sender transmits a frame, the semWait operation decrements this count and blocks the sender should the count go to 0. Each time an ACK is received, the semSignal operation invoked in deliverSWP (see below) increments this count, thus unblocking any waiting sender.
static int
sendSWP(SwpState *state, Msg *frame)
{
struct sendQ_slot *slot;
hbuf[HLEN];
/* wait for send window to open */
semWait(&state->sendWindowNotFull);
state->hdr.SeqNum = ++state->LFS;
slot = &state->sendQ[state->hdr.SeqNum % SWS];
store_swp_hdr(state->hdr, hbuf);
msgAddHdr(frame, hbuf, HLEN);
msgSaveCopy(&slot->msg, frame);
slot->timeout = evSchedule(swpTimeout, slot,
SWP_SEND_TIMEOUT);
return send(LINK, frame);
}Before continuing to the receive side of SWP, we need to reconcile a seeming inconsistency. On the one hand, we have been saying that a high-level protocol invokes the services of a low-level protocol by calling the send operation, so we would expect that a protocol that wants to send a message via SWP would call send(SWP, packet). On the other hand, the procedure that implements SWP's send operation is called sendSWP, and its first argument is a state variable (SwpState). What gives? The answer is that the operating system provides glue code that translates the generic call to send into a protocol-specific call to sendSWP. This glue code maps the first argument to send (the magic protocol variable SWP) into both a function pointer to sendSWP and a pointer to the protocol state that SWP needs to do its job. The reason we have the high-level protocol indirectly invoke the protocol-specific function through the generic function call is that we want to limit how much information the high-level protocol has coded in it about the low-level protocol. This makes it easier to change the protocol graph configuration at some time in the future.
Now we move on to SWP's protocol-specific implementation of the deliver operation, which is given in procedure deliverSWP. This routine actually handles two different kinds of incoming messages: ACKs for frames sent earlier from this node and data frames arriving at this node. In a sense, the ACK half of this routine is the counterpart to the sender side of the algorithm given in sendSWP. A decision as to whether the incoming message is an ACK or a data frame is made by checking the Flags field in the header. Note that this particular implementation does not support piggybacking ACKs on data frames.
When the incoming frame is an ACK, deliverSWP simply finds the slot in the transmit queue (sendQ) that corresponds to the ACK, cancels the timeout event, and frees the frame saved in that slot. This work is actually done in a loop since the ACK may be cumulative. The only other thing to note about this case is the call to subroutine swpInWindow. This subroutine, which is given below, ensures that the sequence number for the frame being acknowledged is within the range of ACKs that the sender currently expects to receive.
When the incoming frame contains data, deliverSWP first calls msgStripHdr and load_swp_hdr to extract the header from the frame. Routine load_swp_hdr is the counterpart to store_swp_hdr discussed earlier; it translates a byte string into the C data structure that holds the SWP header. deliverSWP then calls swpInWindow to make sure the sequence number of the frame is within the range of sequence numbers that it expects. If it is, the routine loops over the set of consecutive frames it has received and passes them up to the higher-level protocol by invoking the deliverHLP routine. It also sends a cumulative ACK back to the sender but does so by looping over the receive queue (it does not use the SeqNumToAck variable used in the prose description given earlier in this section).
static int
deliverSWP(SwpState state, Msg *frame)
{
SwpHdr hdr;
char *hbuf;
hbuf = msgStripHdr(frame, HLEN);
load_swp_hdr(&hdr, hbuf)
if (hdr->Flags & FLAG_ACK_VALID)
{
/* received an acknowledgment---do SENDER side */
if (swpInWindow(hdr.AckNum, state->LAR + 1,
state->LFS))
{
do
{
struct sendQ_slot *slot;
slot = &state->sendQ[++state->LAR % SWS];
evCancel(slot->timeout);
msgDestroy(&slot->msg);
semSignal(&state->sendWindowNotFull);
} while (state->LAR != hdr.AckNum);
}
}
if (hdr.Flags & FLAG_HAS_DATA)
{
struct recvQ_slot *slot;
/* received data packet---do RECEIVER side */
slot = &state->recvQ[hdr.SeqNum % RWS];
if (!swpInWindow(hdr.SeqNum, state->NFE,
state->NFE + RWS - 1))
{
/* drop the message */
return SUCCESS;
}
msgSaveCopy(&slot->msg, frame);
slot->received = TRUE;
if (hdr.SeqNum == state->NFE)
{
Msg m;
while (slot->received)
{
deliver(HLP, &slot->msg);
msgDestroy(&slot->msg);
slot->received = FALSE;
slot = &state->recvQ[++state->NFE % RWS];
}
/* send ACK: */
prepare_ack(&m, state->NFE - 1);
send(LINK, &m);
msgDestroy(&m);
}
}
return SUCCESS;
}Finally, swpInWindow is a simple subroutine that checks to see if a given sequence number falls between some minimum and maximum sequence number.
static bool
swpInWindow(SwpSeqno seqno, SwpSeqno min, SwpSeqno max)
{
SwpSeqno pos, maxpos;
pos = seqno - min; /* pos *should* be in range
[0..MAX) */
maxpos = max - min + 1; /* maxpos is in range
[0..MAX] */
return pos < maxpos;
}Frame Order and Flow Control
The sliding window protocol is perhaps the best known algorithm in computer networking. What is easily confused about the algorithm, however, is that it can be used to serve three different roles. The first role is the one we have been concentrating on in this section—to reliably deliver frames across an unreliable link. (In general, the algorithm can be used to reliably deliver messages across an unreliable network.) This is the core function of the algorithm.
The second role that the sliding window algorithm can serve is to preserve the order in which frames are transmitted. This is easy to do at the receiver—since each frame has a sequence number, the receiver just makes sure that it does not pass a frame up to the next-higher-level protocol until it has already passed up all frames with a smaller sequence number. That is, the receiver buffers (i.e., does not pass along) out-of-order frames. The version of the sliding window algorithm described in this section does preserve frame order, although we could imagine a variation in which the receiver passes frames to the next protocol without waiting for all earlier frames to be delivered. A question we should ask ourselves is whether we really need the sliding window protocol to keep the frames in order at the link level or whether, instead, this functionality should be implemented by a protocol higher in the stack.
The third role that the sliding window algorithm sometimes plays is to support flow control—a feedback mechanism by which the receiver is able to throttle the sender. Such a mechanism is used to keep the sender from overrunning the receiver—that is, from transmitting more data than the receiver is able to process. This is usually accomplished by augmenting the sliding window protocol so that the receiver not only acknowledges frames it has received but also informs the sender of how many frames it has room to receive. The number of frames that the receiver is capable of receiving corresponds to how much free buffer space it has. As in the case of ordered delivery, we need to make sure that flow control is necessary at the link level before incorporating it into the sliding window protocol.
2.5.3 Concurrent Logical Channels
The data link protocol used in the original ARPANET provides an interesting alternative to the sliding window protocol in that it is able to keep the pipe full while still using the simple stop-and-wait algorithm. One important consequence of this approach is that the frames sent over a given link are not kept in any particular order. The protocol also implies nothing about flow control.
The idea underlying the ARPANET protocol, which we refer to as concurrent logical channels, is to multiplex several logical channels onto a single point-to-point link and to run the stop-and-wait algorithm on each of these logical channels. There is no relationship maintained among the frames sent on any of the logical channels, yet because a different frame can be outstanding on each of the several logical channels, the sender can keep the link full.
More precisely, the sender keeps 3 bits of state for each channel: a Boolean, saying whether the channel is currently busy; the 1-bit sequence number to use the next time a frame is sent on this logical channel; and the next sequence number to expect on a frame that arrives on this channel. When the node has a frame to send, it uses the lowest idle channel, and otherwise, it behaves just like stop-and-wait.
In practice, the ARPANET supported 8 logical channels over each ground link and 16 over each satellite link. In the ground-link case, the header for each frame included a 3-bit channel number and a 1-bit sequence number, for a total of 4 bits. This is exactly the number of bits the sliding window protocol requires to support up to 8 outstanding frames on the link when RWS = SWS.
2.6 Multiaccess Networks
Developed in the mid-1970s by researchers at the Xerox Palo Alto Research Center (PARC), the Ethernet eventually became the dominant local area networking technology, emerging from a pack of competing technologies. Today, it competes mainly with 802.11 wireless networks but remains extremely popular in campus networks and datacenters. The more general name for the technology behind the Ethernet is Carrier Sense, Multiple Access with Collision Detect (CSMA/CD).
![]()
As indicated by the CSMA name, the Ethernet is a multiple-access network, meaning that a set of nodes sends and receives frames over a shared link. You can, therefore, think of an Ethernet as being like a bus that has multiple stations plugged into it. The “carrier sense” in CSMA/CD means that all the nodes can distinguish between an idle and a busy link, and “collision detect” means that a node listens as it transmits and can therefore detect when a frame it is transmitting has interfered (collided) with a frame transmitted by another node.
The Ethernet has its roots in an early packet radio network, called Aloha, developed at the University of Hawaii to support computer communication across the Hawaiian Islands. Like the Aloha network, the fundamental problem faced by the Ethernet is how to mediate access to a shared medium fairly and efficiently (in Aloha, the medium was the atmosphere, while in the Ethernet, the medium was originally a coax cable). The core idea in both Aloha and the Ethernet is an algorithm that controls when each node can transmit.
Modern Ethernet links are now largely point-to-point; that is, they connect one host to an Ethernet switch, or they interconnect switches. As a consequence, the “multiple-access” algorithm is not used much in today's wired Ethernets, but a variant is now used in wireless networks, such as 802.11 networks (also known as Wi-Fi). Due to the enormous influence of Ethernet, we chose to describe its classic algorithm here and then explain how it has been adapted to Wi-Fi in the next section. We will also discuss Ethernet switches elsewhere. For now, we will focus on how a single Ethernet link works.
Digital Equipment Corporation and Intel Corporation joined Xerox to define a 10-Mbps Ethernet standard in 1978. This standard then formed the basis for IEEE standard 802.3, which additionally defines a much wider collection of physical media over which an Ethernet can operate, including 100-Mbps, 1-Gbps, 10-Gbps, 40-Gbps, and 100-Gbps versions.
2.6.1 Physical Properties
Ethernet segments were originally implemented using coaxial cable of length up to 500 m. (Modern Ethernets use twisted copper pairs, usually a particular type known as “Category 5,” or optical fibers, and in some cases can be quite a lot longer than 500 m.) This cable was similar to the type used for cable TV. Hosts connected to an Ethernet segment by tapping into it. A transceiver, a small device directly attached to the tap, detected when the line was idle and drove the signal when the host was transmitting. It also received incoming signals. The transceiver, in turn, connected to an Ethernet adaptor, which was plugged into the host. This configuration is shown in Figure 2.19.

Multiple Ethernet segments can be joined together by repeaters (or a multiport variant of a repeater, called a hub). A repeater is a device that forwards digital signals, much like an amplifier forwards analog signals; repeaters do not understand bits or frames. No more than four repeaters could be positioned between any pair of hosts, meaning that a classical Ethernet had a total reach of only 2500 m. For example, using just two repeaters between any pair of hosts supports a configuration similar to the one illustrated in Figure 2.20; that is, a segment running down the spine of a building with a segment on each floor.

Any signal placed on the Ethernet by a host is broadcast over the entire network; that is, the signal is propagated in both directions, and repeaters and hubs forward the signal on all outgoing segments. Terminators attached to the end of each segment absorb the signal and keep it from bouncing back and interfering with trailing signals. The original Ethernet specifications used the Manchester encoding scheme described in an earlier section, while 4B/5B encoding (or the similar 8B/10B scheme) is used today on higher-speed Ethernets.
It is important to understand that whether a given Ethernet spans a single segment, a linear sequence of segments connected by repeaters, or multiple segments connected in a star configuration, data transmitted by any one host on that Ethernet reach all the other hosts. This is the good news. The bad news is that all these hosts are competing for access to the same link, and, as a consequence, they are said to be in the same collision domain. The multiaccess part of the Ethernet is all about dealing with the competition for the link that arises in a collision domain.
2.6.2 Access Protocol
We now turn our attention to the algorithm that controls access to a shared Ethernet link. This algorithm is commonly called the Ethernet's media access control (MAC). It is typically implemented in hardware on the network adaptor. We will not describe the hardware per se but instead focus on the algorithm it implements. First, however, we describe the Ethernet's frame format and addresses.
Frame Format
Each Ethernet frame is defined by the format given in Figure 2.21. The 64-bit preamble allows the receiver to synchronize with the signal; it is a sequence of alternating 0s and 1s. Both the source and destination hosts are identified with a 48-bit address. The packet type field serves as the demultiplexing key; it identifies to which of possibly many higher-level protocols this frame should be delivered. Each frame contains up to 1500 bytes of data. Minimally, a frame must contain at least 46 bytes of data, even if this means the host has to pad the frame before transmitting it. The reason for this minimum frame size is that the frame must be long enough to detect a collision; we discuss this more below. Finally, each frame includes a 32-bit CRC. Like the HDLC protocol described in an earlier section, the Ethernet is a bit-oriented framing protocol. Note that from the host's perspective, an Ethernet frame has a 14-byte header: two 6-byte addresses and a 2-byte type field. The sending adaptor attaches the preamble and CRC before transmitting, and the receiving adaptor removes them.

Addresses
Each host on an Ethernet—in fact, every Ethernet host in the world—has a unique Ethernet address. Technically, the address belongs to the adaptor, not the host; it is usually burned into ROM. Ethernet addresses are typically printed in a form humans can read as a sequence of six numbers separated by colons. Each number corresponds to 1 byte of the 6-byte address and is given by a pair of hexadecimal digits, one for each of the 4-bit nibbles in the byte; leading 0s are dropped. For example, 8:0:2b:e4:b1:2 is the human-readable representation of Ethernet address
00001000 00000000 00101011 11100100 10110001 00000010
To ensure that every adaptor gets a unique address, each manufacturer of Ethernet devices is allocated a different prefix that must be prepended to the address on every adaptor they build. For example, Advanced Micro Devices has been assigned the 24-bit prefix 080020 (or 8:0:20). A given manufacturer then makes sure the address suffixes it produces are unique.
Each frame transmitted on an Ethernet is received by every adaptor connected to that Ethernet. Each adaptor recognizes those frames addressed to its address and passes only those frames on to the host. (An adaptor can also be programmed to run in promiscuous mode, in which case it delivers all received frames to the host, but this is not the normal mode.) In addition to these unicast addresses, an Ethernet address consisting of all 1s is treated as a broadcast address; all adaptors pass frames addressed to the broadcast address up to the host. Similarly, an address that has the first bit set to 1 but is not the broadcast address is called a multicast address. A given host can program its adaptor to accept some set of multicast addresses. Multicast addresses are used to send messages to some subset of the hosts on an Ethernet (e.g., all file servers). To summarize, an Ethernet adaptor receives all frames and accepts:
- ■ frames addressed to its own address;
- ■ frames addressed to the broadcast address;
- ■ frames addressed to a multicast address, if it has been instructed to listen to that address;
- ■ all frames, if it has been placed in promiscuous mode.
It passes to the host only the frames that it accepts.
Transmitter Algorithm
As we have just seen, the receiver side of the Ethernet protocol is simple; the real smarts are implemented at the sender's side. The transmitter algorithm is defined as follows.
When the adaptor has a frame to send and the line is idle, it transmits the frame immediately; there is no negotiation with the other adaptors. The upper bound of 1500 bytes in the message means that the adaptor can occupy the line for only a fixed length of time.
When an adaptor has a frame to send and the line is busy, it waits for the line to go idle and then transmits immediately. (To be more precise, all adaptors wait 9.6 μs after the end of one frame before beginning to transmit the next frame. This is true for both the sender of the first frame as well as those nodes listening for the line to become idle.) The Ethernet is said to be a 1-persistent protocol because an adaptor with a frame to send transmits with probability 1 whenever a busy line goes idle. In general, a p-persistent algorithm transmits with probability ![]() after a line becomes idle and defers with probability q = 1 − p. The reasoning behind choosing a p < 1 is that there might be multiple adaptors waiting for the busy line to become idle, and we do not want all of them to begin transmitting at the same time. If each adaptor transmits immediately with a probability of, say, 33%, then up to three adaptors can be waiting to transmit, and the odds are that only one will begin transmitting when the line becomes idle. Despite this reasoning, an Ethernet adaptor always transmits immediately after noticing that the network has become idle and has been very effective in doing so.
after a line becomes idle and defers with probability q = 1 − p. The reasoning behind choosing a p < 1 is that there might be multiple adaptors waiting for the busy line to become idle, and we do not want all of them to begin transmitting at the same time. If each adaptor transmits immediately with a probability of, say, 33%, then up to three adaptors can be waiting to transmit, and the odds are that only one will begin transmitting when the line becomes idle. Despite this reasoning, an Ethernet adaptor always transmits immediately after noticing that the network has become idle and has been very effective in doing so.
To complete the story about p-persistent protocols for the case when p < 1, you might wonder how long a sender that loses the coin flip (i.e., decides to defer) has to wait before it can transmit. The answer for the Aloha network, which originally developed this style of protocol, was to divide time into discrete slots, with each slot corresponding to the length of time it takes to transmit a full frame. Whenever a node has a frame to send and it senses an empty (idle) slot, it transmits with probability p and defers until the next slot with probability q = 1 − p. If that next slot is also empty, the node again decides to transmit or defer, with probabilities p and q, respectively. If that next slot is not empty—that is, some other station has decided to transmit—then the node simply waits for the next idle slot and the algorithm repeats.
Returning to our discussion of the Ethernet, because there is no centralized control, it is possible for two (or more) adaptors to begin transmitting at the same time, either because both found the line to be idle or because both had been waiting for a busy line to become idle. When this happens, the two (or more) frames are said to collide on the network. Each sender, because the Ethernet supports collision detection, is able to determine that a collision is in progress. At the moment an adaptor detects that its frame is colliding with another, it first makes sure to transmit a 32-bit jamming sequence and then stops the transmission. Thus, a transmitter will minimally send 96 bits in the case of a collision: 64-bit preamble plus 32-bit jamming sequence.
One way that an adaptor will send only 96 bits—which is sometimes called a runt frame—is if the two hosts are close to each other. Had the two hosts been farther apart, they would have had to transmit longer, and thus send more bits, before detecting the collision. In fact, the worst-case scenario happens when the two hosts are at opposite ends of the Ethernet. To know for sure that the frame it just sent did not collide with another frame, the transmitter may need to send as many as 512 bits. Not coincidentally, every Ethernet frame must be at least 512 bits (64 bytes) long: 14 bytes of header plus 46 bytes of data plus 4 bytes of CRC.
Why 512 bits? The answer is related to another question you might ask about an Ethernet: Why is its length limited to only 2500 m? Why not 10 or 1000 km? The answer to both questions has to do with the fact that the farther apart two nodes are, the longer it takes for a frame sent by one to reach the other, and the network is vulnerable to a collision during this time.
Figure 2.22 illustrates the worst-case scenario, where hosts A and B are at opposite ends of the network. Suppose host A begins transmitting a frame at time t, as shown in (a). It takes it one link latency (let us denote the latency as d) for the frame to reach host B. Thus, the first bit of A's frame arrives at B at time t + d, as shown in (b). Suppose an instant before host A's frame arrives (i.e., B still sees an idle line), host B begins to transmit its own frame. B's frame will immediately collide with A's frame, and this collision will be detected by host B (c). Host B will send the 32-bit jamming sequence, as described above. (B's frame will be a runt.) Unfortunately, host A will not know that the collision occurred until B's frame reaches it, which will happen one link latency later, at time t + 2 × d, as shown in (d). Host A must continue to transmit until this time in order to detect the collision. In other words, host A must transmit for 2 × d to be sure that it detects all possible collisions. Considering that a maximally configured Ethernet is 2500 m long and that there may be up to four repeaters between any two hosts, the round-trip delay has been determined to be 51.2 μs, which on a 10-Mbps Ethernet corresponds to 512 bits. The other way to look at this situation is that we need to limit the Ethernet's maximum latency to a fairly small value (e.g., 51.2 μs) for the access algorithm to work; hence, an Ethernet's maximum length must be something on the order of 2500 m.

Once an adaptor has detected a collision and stopped its transmission, it waits a certain amount of time and tries again. Each time it tries to transmit but fails, the adaptor doubles the amount of time it waits before trying again. This strategy of doubling the delay interval between each retransmission attempt is a general technique known as exponential backoff. More precisely, the adaptor first delays either 0 or 51.2 μs, selected at random. If this effort fails, it then waits 0, 51.2, 102.4, or 153.6 μs (selected randomly) before trying again; this is k × 51.2 for k = 0..3. After the third collision, it waits k × 51.2 for k = 0..23 − 1, again selected at random. In general, the algorithm randomly selects a k between 0 and 2n − 1 and waits k × 51.2 μs, where n is the number of collisions experienced so far. The adaptor gives up after a given number of tries and reports a transmit error to the host. Adaptors typically retry up to 16 times, although the backoff algorithm caps n in the above formula at 10.
2.6.3 Longevity of Ethernet
Ethernet has been the dominant local area network technology for over 30 years. Today, it is typically deployed point-to-point rather than tapping into a coax cable, it often runs at speeds of 1 or 10 Gbps rather than 10 Mbps, and it allows jumbo packets with up to 9000 bytes of data rather than 1500 bytes. But it remains backwards compatible with the original standard. This makes it worth saying a few words about why Ethernets have been so successful so that we can understand the properties we should emulate with any technology that tries to replace it.
First, an Ethernet is extremely easy to administer and maintain: there are no routing or configuration tables to be kept up-to-date, and it is easy to add a new host to the network. It is hard to imagine a simpler network to administer. Second, it is inexpensive: cable/fiber is relatively cheap, and the only other cost is the network adaptor on each host. Ethernet became deeply entrenched for these reasons, and any switch-based approach that aspired to displace it required additional investment in infrastructure (the switches), on top of the cost of each adaptor. The switch-based variant of Ethernet did eventually succeed in replacing multiaccess Ethernet, but this is primarily because it could be deployed incrementally—with some hosts connected by point-to-point links to switches while others remained tapped into coax and connected to repeaters or hubs—all the while retaining the simplicity of network administration.
2.7 Wireless Networks
Wireless technologies differ from wired links in some important ways while at the same time sharing many common properties. Like wired links, issues of bit errors are of great concern—typically even more so due to the unpredictable noise environment of most wireless links. Framing and reliability also have to be addressed. Unlike wired links, power is a big issue for wireless, especially because wireless links are often used by small mobile devices (like phones and sensors) that have limited access to power (e.g., a small battery). Furthermore, you cannot go blasting away at arbitrarily high power with a radio transmitter—there are concerns about interference with other devices and usually regulations about how much power a device may emit at any given frequency.
![]()
Wireless media are also inherently multiaccess; it is difficult to direct your radio transmission to just a single receiver or to avoid receiving radio signals from any transmitter with enough power in your neighborhood. Hence, media access control is a central issue for wireless links. And, because it is hard to control who receives your signal when you transmit over the air, issues of eavesdropping may also have to be addressed.

There is a baffling assortment of different wireless technologies, each of which makes different tradeoffs in various dimensions. One simple way to categorize the different technologies is by the data rates they provide and how far apart communicating nodes can be. Other important differences include which part of the electromagnetic spectrum they use (including whether it requires a license) and how much power they consume. In this section, we discuss two prominent wireless technologies: Wi-Fi (more formally known as 802.11) and Bluetooth. The next section discusses cellular networks in the context of ISP access services. Table 2.3 gives an overview of these technologies and how they compare to each other.
Table 2.3
| Bluetooth (802.15.1) | Wi-Fi (802.11) | 4G cellular | |
|---|---|---|---|
| Typical link length | 10 m | 100 m | Tens of kilometers |
| Typical data rate | 2 Mbps (shared) | 150–450 Mbps | 1–5 Mbps |
| Typical use | Link a peripheral to a computer | Link a computer to a wired base | Link mobile phone to a wired tower |
| Wired technology analogy | USB | Ethernet | PON |

You may recall that bandwidth sometimes means the width of a frequency band in hertz and sometimes the data rate of a link. Because both these concepts come up in discussions of wireless networks, we are going to use bandwidth here in its stricter sense—width of a frequency band—and use the term data rate to describe the number of bits per second that can be sent over the link, as in Table 2.3.
2.7.1 Basic Issues
Because wireless links all share the same medium, the challenge is to share that medium efficiently, without unduly interfering with each other. Most of this sharing is accomplished by dividing it up along the dimensions of frequency and space. Exclusive use of a particular frequency in a particular geographic area may be allocated to an individual entity such as a corporation. It is feasible to limit the area covered by an electromagnetic signal because such signals weaken, or attenuate, with the distance from their origin. To reduce the area covered by your signal, reduce the power of your transmitter.
These allocations are typically determined by government agencies, such as the Federal Communications Commission (FCC) in the United States. Specific bands (frequency ranges) are allocated to certain uses. Some bands are reserved for government use. Other bands are reserved for uses such as AM radio, FM radio, television, satellite communication, and cellular phones. Specific frequencies within these bands are then licensed to individual organizations for use within certain geographical areas. Finally, several frequency bands are set aside for license-exempt usage—bands in which a license is not needed.
Devices that use license-exempt frequencies are still subject to certain restrictions to make that otherwise unconstrained sharing work. Most important of these is a limit on transmission power. This limits the range of a signal, making it less likely to interfere with another signal. For example, a cordless phone (a common unlicensed device) might have a range of about 100 feet.
One idea that shows up a lot when spectrum is shared among many devices and applications is spread spectrum. The idea behind spread spectrum is to spread the signal over a wider frequency band so as to minimize the impact of interference from other devices. (Spread spectrum was originally designed for military use, so these “other devices” were often attempting to jam the signal.) For example, frequency hopping is a spread spectrum technique that involves transmitting the signal over a random sequence of frequencies; that is, first transmitting at one frequency, then a second, then a third, and so on. The sequence of frequencies is not truly random but is instead computed algorithmically by a pseudorandom number generator. The receiver uses the same algorithm as the sender and initializes it with the same seed; hence, it is able to hop frequencies in sync with the transmitter to correctly receive the frame. This scheme reduces interference by making it unlikely that two signals would be using the same frequency for more than the infrequent isolated bit.
A second spread spectrum technique, called direct sequence, adds redundancy for greater tolerance of interference. Each bit of data is represented by multiple bits in the transmitted signal so that if some of the transmitted bits are damaged by interference, there is usually enough redundancy to recover the original bit. For each bit the sender wants to transmit, it actually sends the exclusive-OR of that bit and n random bits. As with frequency hopping, the sequence of random bits is generated by a pseudorandom number generator known to both the sender and the receiver. The transmitted values, known as an n-bit chipping code, spread the signal across a frequency band that is n times wider than the frame would have otherwise required. Figure 2.23 gives an example of a 4-bit chipping sequence.

Different parts of the electromagnetic spectrum have different properties, making some better suited to communication and some less so. For example, some can penetrate buildings and some cannot. Governments regulate only the prime communication portion: the radio and microwave ranges. As demand for prime spectrum increases, there is great interest in the spectrum that is becoming available as analog television is phased out in favor of digital.
In many wireless networks today, we observe that there are two different classes of endpoints. One endpoint, sometimes described as the base station, usually has no mobility but has a wired (or at least high-bandwidth) connection to the Internet or other networks, as shown in Figure 2.24. The node at the other end of the link—shown here as a client node—is often mobile and relies on its link to the base station for all of its communication with other nodes.

Observe that in Figure 2.24, we have used a wavy pair of lines to represent the wireless “link” abstraction provided between two devices (e.g., between a base station and one of its client nodes). One of the interesting aspects of wireless communication is that it naturally supports point-to-multipoint communication, because radio waves sent by one device can be simultaneously received by many devices. However, it is often useful to create a point-to-point link abstraction for higher-layer protocols, and we will see examples of how this works later in this section.
Note that in Figure 2.24, communication between nonbase (client) nodes is routed via the base station. This is in spite of the fact that radio waves emitted by one client node may well be received by other client nodes—the common base station model does not permit direct communication between the client nodes.
This topology implies three qualitatively different levels of mobility. The first level is no mobility, such as when a receiver must be in a fixed location to receive a directional transmission from the base station. The second level is mobility within the range of a base, as is the case with Bluetooth. The third level is mobility between bases, as is the case with cell phones and Wi-Fi.
An alternative topology that is seeing increasing interest is the mesh or ad hoc network. In a wireless mesh, nodes are peers; that is, there is no special base station node. Messages may be forwarded via a chain of peer nodes as long as each node is within range of the preceding node. This is illustrated in Figure 2.25. This allows the wireless portion of a network to extend beyond the limited range of a single radio. From the point of view of competition between technologies, this allows a shorter-range technology to extend its range and potentially compete with a longer-range technology. Meshes also offer fault tolerance by providing multiple routes for a message to get from point A to point B. A mesh network can be extended incrementally, with incremental costs. On the other hand, a mesh network requires nonbase nodes to have a certain level of sophistication in their hardware and software, potentially increasing per-unit costs and power consumption, a critical consideration for battery-powered devices. Wireless mesh networks are of considerable research interest, but they are still in their relative infancy compared to networks with base stations. Wireless sensor networks, another hot emerging technology, often form wireless meshes.

Now that we have covered some of the common wireless issues, let us take a look at the details of two common wireless technologies.
2.7.2 802.11/Wi-Fi
Most readers will have used a wireless network based on the IEEE 802.11 standards, often referred to as Wi-Fi. Wi-Fi is technically a trademark, owned by a trade group called the Wi-Fi Alliance, which certifies product compliance with 802.11. Like Ethernet, 802.11 is designed for use in a limited geographical area (homes, office buildings, campuses), and its primary challenge is to mediate access to a shared communication medium—in this case, signals propagating through space.
Physical Properties
802.11 defines a number of different physical layers that operate in various frequency bands and provide a range of different data rates.
The original 802.11 standard defined two radio-based physical layers standards, one using frequency hopping (over 79 1-MHz-wide frequency bandwidths) and the other using direct sequence spread spectrum (with an 11-bit chipping sequence). Both provided data rates in the 2 Mbps range. Subsequently, the physical layer standard 802.11b was added, using a variant of direct sequence and supporting up to 11 Mbps. These three standards all operated in the license-exempt 2.4-GHz frequency band of the electromagnetic spectrum. Then came 802.11a, which delivered up to 54 Mbps using a variant of frequency division multiplexing called orthogonal frequency division multiplexing (OFDM). 802.11a runs in the license-exempt 5-GHz band. 802.11g followed and, also using OFDM, delivered up to 54 Mbps. 802.11g is backward compatible with 802.11b (and returns to the 2.4-GHz band).
At the time of writing, many devices support 802.11n or 802.11ac, which typically achieve per-device data rates of 150 Mbps to 450 Mbps, respectively. This improvement is partly due to the use of multiple antennas and allowing greater wireless channel bandwidths. The use of multiple antennas is often called MIMO for multiple-input, multiple-output. The latest emerging standard, 802.11ax, promises another substantial improvement in throughput, in part by adopting many of the coding and modulation techniques used in the 4G/5G cellular network, which we describe in the next section.
It is common for commercial products to support more than one flavor of 802.11; many base stations support all five variants (a,b, g, n, and ac). This not only ensures compatibility with any device that supports any one of the standards but also makes it possible for two such products to choose the highest bandwidth option for a particular environment.
It is worth noting that while all the 802.11 standards define a maximum bit rate that can be supported, they mostly support lower bit rates as well (e.g., 802.11a allows for bit rates of 6, 9, 12, 18, 24, 36, 48, and 54 Mbps). At lower bit rates, it is easier to decode transmitted signals in the presence of noise. Different modulation schemes are used to achieve the various bit rates. In addition, the amount of redundant information in the form of error-correcting codes is varied. More redundant information means higher resilience to bit errors at the cost of lowering the effective data rate (since more of the transmitted bits are redundant).
The systems try to pick an optimal bit rate based on the noise environment in which they find themselves; the algorithms for bit rate selection can be quite complex. Interestingly, the 802.11 standards do not specify a particular approach but leave the algorithms to the various vendors. The basic approach to picking a bit rate is to estimate the bit error rate either by directly measuring the signal-to-noise ratio (SNR) at the physical layer or by estimating the SNR by measuring how often packets are successfully transmitted and acknowledged. In some approaches, a sender will occasionally probe a higher bit rate by sending one or more packets at that rate to see if it succeeds.
Collision Avoidance
At first glance, it might seem that a wireless protocol would follow the same algorithm as the Ethernet—wait until the link becomes idle before transmitting and back off should a collision occur—and, to a first approximation, this is what 802.11 does. The additional complication for wireless is that while a node on an Ethernet receives every other node's transmissions and can transmit and receive at the same time, neither of these conditions holds for wireless nodes. This makes detection of collisions rather more complex. The reason wireless nodes cannot usually transmit and receive at the same time (on the same frequency) is that the power generated by the transmitter is much higher than any received is likely to be and so swamps the receiving circuitry. The reason a node may not receive transmissions from another node is because that node may be too far away or blocked by an obstacle. This situation is a bit more complex than it first appears, as the following discussion will illustrate.
Consider the situation depicted in Figure 2.26, where A and C are both within range of B but not each other. Suppose both A and C want to communicate with B, and so they each send it a frame. A and C are unaware of each other, since their signals do not carry that far. These two frames collide with each other at B, but unlike an Ethernet, neither A nor C is aware of this collision. A and C are said to be hidden nodes with respect to each other.

A related problem, called the exposed node problem, occurs under the circumstances illustrated in Figure 2.27, where each of the four nodes is able to send and receive signals that reach just the nodes to its immediate left and right. For example, B can exchange frames with A and C, but it cannot reach D, while C can reach B and D but not A. Suppose B is sending to A. Node C is aware of this communication because it hears B's transmission. It would be a mistake, however, for C to conclude that it cannot transmit to anyone just because it can hear B's transmission. For example, suppose C wants to transmit to node D. This is not a problem, since C's transmission to D will not interfere with A's ability to receive from B. (It would interfere with A sending to B, but B is transmitting in our example.)

802.11 addresses these problems by using CSMA/CA, where the CA stands for collision avoidance, in contrast to the collision detection of CSMA/CD used on Ethernets. There are a few pieces to make this work.
The Carrier Sense part seems simple enough: before sending a packet, the transmitter checks if it can hear any other transmissions; if not, it sends. However, because of the hidden node problem, just waiting for the absence of signals from other transmitters does not guarantee that a collision will not occur from the perspective of the receiver. For this reason, one part of CSMA/CA is an explicit ACK from the receiver to the sender. If the packet was successfully decoded and passed its CRC at the receiver, the receiver sends an ACK back to the sender.
Note that if a collision does occur, it will render the entire packet useless. For this reason, 802.11 adds an optional mechanism called RTS-CTS (Ready to Send-Clear to Send). This goes some way toward addressing the hidden node problem. The sender sends an RTS—a short packet—to the intended receiver, and if that packet is received successfully, the receiver responds with another short packet, the CTS. Even though the RTS may not have been heard by a hidden node, the CTS probably will be. This effectively tells the nodes within range of the receiver that they should not send anything for a while—the amount of time of the intended transmission is included in the RTS and CTS packets. After that time plus a small interval has passed, the carrier can be assumed to be available again, and another node is free to try to send.
Of course, two nodes might detect an idle link and try to transmit an RTS frame at the same time, causing their RTS frames to collide with each other. The senders realize the collision has happened when they do not receive the CTS frame after a period of time, in which case they each wait a random amount of time before trying again. The amount of time a given node delays is defined by an exponential backoff algorithm very much like that used on the Ethernet.
After a successful RTS-CTS exchange, the sender sends its data packet and, if all goes well, receives an ACK for that packet. In the absence of a timely ACK, the sender will try again to request usage of the channel, using the same process described above. By this time, of course, other nodes may again be trying to get access to the channel as well.
Distribution System
As described so far, 802.11 would be suitable for a network with a mesh (ad hoc) topology, and development of an 802.11s standard for mesh networks is nearing completion. At the current time, however, nearly all 802.11 networks use a base-station-oriented topology.
Instead of all nodes being created equal, some nodes are allowed to roam (e.g., your laptop) and some are connected to a wired network infrastructure. 802.11 calls these base stations access points (APs), and they are connected to each other by a so-called distribution system. Figure 2.28 illustrates a distribution system that connects three access points, each of which services the nodes in some region. Each access point operates on some channel in the appropriate frequency range, and each AP will typically be on a different channel than its neighbors.

The details of the distribution system are not important to this discussion—it could be an Ethernet, for example. The only important point is that the distribution network operates at the link layer, the same protocol layer as the wireless links. In other words, it does not depend on any higher-level protocols (such as the network layer).
Although two nodes can communicate directly with each other if they are within reach of each other, the idea behind this configuration is that each node associates itself with one access point. For node A to communicate with node E, for example, A first sends a frame to its access point (AP-1), which forwards the frame across the distribution system to AP-3, which finally transmits the frame to E. How AP-1 knew to forward the message to AP-3 is beyond the scope of 802.11; it may have used a bridging protocol. What 802.11 does specify is how nodes select their access points and, more interestingly, how this algorithm works in light of nodes moving from one cell to another.
The technique for selecting an AP is called scanning and involves the following four steps:
- 1. The node sends a Probe frame.
- 2. All APs within reach reply with a Probe Response frame.
- 3. The node selects one of the access points and sends that AP an Association Request frame.
- 4. The AP replies with an Association Response frame.
A node engages this protocol whenever it joins the network, as well as when it becomes unhappy with its current AP. This might happen, for example, because the signal from its current AP has weakened due to the node moving away from it. Whenever a node acquires a new AP, the new AP notifies the old AP of the change (this happens in step 4) via the distribution system.
Consider the situation shown in Figure 2.29, where node C moves from the cell serviced by AP-1 to the cell serviced by AP-2. As it moves, it sends Probe frames, which eventually result in Probe Response frames from AP-2. At some point, C prefers AP-2 over AP-1, and so it associates itself with that access point.

The mechanism just described is called active scanning since the node is actively searching for an access point. APs also periodically send a Beacon frame that advertises the capabilities of the access point; these include the transmission rates supported by the AP. This is called passive scanning, and a node can change to this AP based on the Beacon frame simply by sending an Association Request frame back to the access point.
Frame Format
Most of the 802.11 frame format, which is depicted in Figure 2.30, is exactly what we would expect. The frame contains the source and destination node addresses, each of which is 48 bits long; up to 2312 bytes of data; and a 32-bit CRC. The Control field contains three subfields of interest (not shown): a 6-bit Type field that indicates whether the frame that carries data is an RTS or CTS frame or is being used by the scanning algorithm and a pair of 1-bit fields—called ToDS and FromDS—that are described below.

The peculiar thing about the 802.11 frame format is that it contains four, rather than two, addresses. How these addresses are interpreted depends on the settings of the ToDS and FromDS bits in the frame's Control field. This is to account for the possibility that the frame had to be forwarded across the distribution system, which would mean that the original sender is not necessarily the same as the most recent transmitting node. Similar reasoning applies to the destination address. In the simplest case, when one node is sending directly to another, both the DS bits are 0, Addr1 identifies the target node, and Addr2 identifies the source node. In the most complex case, both DS bits are set to 1, indicating that the message went from a wireless node onto the distribution system, and then from the distribution system to another wireless node. With both bits set, Addr1 identifies the ultimate destination, Addr2 identifies the immediate sender (the one that forwarded the frame from the distribution system to the ultimate destination), Addr3 identifies the intermediate destination (the one that accepted the frame from a wireless node and forwarded it across the distribution system), and Addr4 identifies the original source. In terms of the example given in Figure 2.28, Addr1 corresponds to E, Addr2 identifies AP-3, Addr3 corresponds to AP-1, and Addr4 identifies A.
Security of Wireless Links
One of the fairly obvious problems of wireless links compared to wires or fibers is that you cannot be too sure where your data have gone. You can probably figure out if they were received by the intended receiver, but there is no telling how many other receivers might have also picked up your transmission. So, if you are concerned about the privacy of your data, wireless networks present a challenge.
Even if you are not concerned about data privacy—or perhaps have taken care of it in some other way—you may be concerned about an unauthorized user injecting data into your network. If nothing else, such a user might be able to consume resources that you would prefer to consume yourself, such as the finite bandwidth between your house and your ISP.
For these reasons, wireless networks typically come with some sort of mechanism to control access to both the link itself and the transmitted data. These mechanisms are often categorized as wireless security. The widely adopted WPA2 is described in Chapter 8.
2.7.3 Bluetooth (802.15.1)
Bluetooth fills the niche of very short-range communication between mobile phones, PDAs, notebook computers, and other personal or peripheral devices. For example, Bluetooth can be used to connect a mobile phone to a headset or a notebook computer to a keyboard. Roughly speaking, Bluetooth is a more convenient alternative to connecting two devices with a wire. In such applications, it is not necessary to provide much range or bandwidth. This means that Bluetooth radios can use quite low power transmission, since transmission power is one of the main factors affecting bandwidth and range of wireless links. This matches the target applications for Bluetooth-enabled devices—most of them are battery-powered (such as the ubiquitous phone headset), and hence it is important that they do not consume much power.
Bluetooth operates in the license-exempt band at 2.45 GHz. Bluetooth links have typical bandwidths around 1 to 3 Mbps and a range of about 10 m. For this reason, and because the communicating devices typically belong to one individual or group, Bluetooth is sometimes categorized as a Personal Area Network (PAN).
Bluetooth is specified by an industry consortium called the Bluetooth Special Interest Group. It specifies an entire suite of protocols, going beyond the link layer to define application protocols, which it calls profiles, for a range of applications. For example, there is a profile for synchronizing a PDA with a personal computer. Another profile gives a mobile computer access to a wired LAN in the manner of 802.11, although this was not Bluetooth's original goal. The IEEE 802.15.1 standard is based on Bluetooth but excludes the application protocols.
The basic Bluetooth network configuration, called a piconet, consists of a master device and up to seven slave devices, as shown in Figure 2.31. Any communication is between the master and a slave; the slaves do not communicate directly with each other. Because slaves have a simpler role, their Bluetooth hardware and software can be simpler and cheaper.

Since Bluetooth operates in a license-exempt band, it is required to use a spread spectrum technique to deal with possible interference in the band. It uses frequency hopping with 79 channels (frequencies), using each for 625 μs at a time. This provides a natural time slot for Bluetooth to use for synchronous time division multiplexing. A frame takes up one, three, or five consecutive time slots. Only the master can start to transmit in odd-numbered slots. A slave can start to transmit in an even-numbered slot—but only in response to a request from the master during the previous slot, thereby preventing any contention between the slave devices.
A slave device can be parked; that is, it is set to an inactive, low-power state. A parked device cannot communicate on the piconet; it can only be reactivated by the master. A piconet can have up to 255 parked devices in addition to its active slave devices.
In the realm of very low-power, short-range communication, there are a few other technologies besides Bluetooth. One of these is ZigBee, devised by the ZigBee alliance and standardized as IEEE 802.15.4. It is designed for situations where the bandwidth requirements are low and power consumption must be very low to give very long battery life. It is also intended to be simpler and cheaper than Bluetooth, making it feasible to incorporate in cheaper devices such as sensors. Sensors are becoming an increasingly important class of networked devices as technology advances to the point where very cheap small devices can be deployed in large quantities to monitor things like temperature, humidity, and energy consumption in a building.
2.8 Access Networks
In addition to the Ethernet and Wi-Fi connections we typically use to connect to the Internet at home, at work, at school, and in many public spaces, most of us connect to the Internet over an access or broadband service that we buy from an ISP. This section describes two such technologies: Passive Optical Networks (PONs), commonly referred to as fiber-to-the-home, and cellular networks that connect our mobile devices. In both cases, the networks are multiaccess (like Ethernet and Wi-Fi), but as we will see, their approach to mediating access is quite different.
To set a little more context, ISPs (e.g., telco or cable companies) often operate a national backbone, and connected to the periphery of that backbone are hundreds or thousands of edge sites, each of which serves a city or neighborhood. These edge sites are commonly called Central Offices in the telco world and Head Ends in the cable world, but despite their names implying “centralized” and “root of the hierarchy,” these sites are at the very edge of the ISP's network; the ISP side of the last mile that directly connects to customers. PONs and cellular access networks are anchored in these facilities.3
2.8.1 Passive Optical Network
PON is the technology most commonly used to deliver fiber-based broadband to homes and businesses. PON adopts a point-to-multipoint design, which means the network is structured as a tree, with a single point starting in the ISP's network and then fanning out to reach up to 1024 homes. PON gets its name from the fact that the splitters are passive: they forward optical signals downstream and upstream without actively storing and forwarding frames. In this way, they are the optical variant of repeaters used in the classic Ethernet. Framing then happens at the source in the ISP's premises, in a device called an Optical Line Terminal (OLT), and at the endpoints in individual homes, in a device called an Optical Network Unit (ONU).
Figure 2.32 shows an example PON, simplified to depict just one ONU and one OLT. In practice, a central office would include multiple OLTs connecting to thousands of customer homes. For completeness, Figure 2.32 also includes two other details about how the PON is connected to the ISP's backbone (and hence to the rest of the Internet). The Agg Switch aggregates traffic from a set of OLTs, and the BNG (Broadband Network Gateway) is a piece of telco equipment that, among many other things, meters Internet traffic for the sake of billing. As its name implies, the BNG is effectively the gateway between the access network (everything to the left of the BNG) and the Internet (everything to the right of the BNG).

Because the splitters are passive, PON has to implement some form of multiaccess protocol. The approach it adopts can be summarized as follows. First, upstream and downstream traffic are transmitted on two different optical wavelengths, so they are completely independent of each other. Downstream traffic starts at the OLT, and the signal is propagated down every link in the PON. As a consequence, every frame reaches every ONU. This device then looks at a unique identifier in the individual frames sent over the wavelength and either keeps the frame (if the identifier is for it) or drops it (if not). Encryption is used to keep ONUs from eavesdropping on their neighbors' traffic.
Upstream traffic is then time-division multiplexed on the upstream wavelength, with each ONU periodically getting a turn to transmit. Because the ONUs are distributed over a fairly wide area (measured in kilometers) and at different distances from the OLT, it is not practical for them to transmit based on synchronized clocks, as in SONET. Instead, the ONT transmits grants to the individual ONUs, giving them a time interval during which they can transmit. In other words, the single OLT is responsible for centrally implementing the round-robin sharing of the shared PON. This includes the possibility that the OLT can grant each ONU a different share of time, effectively implementing different levels of service.
PON is similar to Ethernet in the sense that it defines a sharing algorithm that has evolved over time to accommodate higher and higher bandwidths. G-PON (Gigabit-PON) is the most widely deployed today, supporting a bandwidth of 2.25 Gbps. XGS-PON (10 Gigabit-PON) is just now starting to be deployed.
2.8.2 Cellular Network
While cellular telephone technology had its roots in analog voice communication, data services based on cellular standards are now the norm. Like Wi-Fi, cellular networks transmit data at certain bandwidths in the radio spectrum. Unlike Wi-Fi, which permits anyone to use a channel at either 2.4 or 5 GHz (all you have to do is set up a base station, as many of us do in our homes), exclusive use of various frequency bands have been auctioned off and licensed to service providers, who in turn sell mobile access service to their subscribers.
The frequency bands that are used for cellular networks vary around the world and are complicated by the fact that ISPs often simultaneously support both old/legacy technologies and new/next-generation technologies, each of which occupies a different frequency band. The high-level summary is that traditional cellular technologies range from 700 MHz to 2400 MHz, with new mid-spectrum allocations now happening at 6 GHz and millimeter-wave (mmWave) allocations opening above 24 GHz.
Like 802.11, cellular technology relies on the use of base stations that are connected to a wired network. In the case of the cellular network, the base stations are often called Broadband Base Units (BBUs), the mobile devices that connect to them are usually referred to as User Equipment (UE), and the set of BBUs are anchored at an Evolved Packet Core (EPC) hosted in a central office. The wireless network served by the EPC is often called a Radio Access Network (RAN).
BBUs officially go by another name—Evolved NodeB, often abbreviated eNodeB or eNB—where NodeB is what the radio unit was called in an early incarnation of cellular networks (and has since evolved). Given that the cellular world continues to evolve at a rapid pace and eNBs are soon to be upgraded to gNBs, we have decided to use the more generic and less cryptic BBU.
Figure 2.33 depicts one possible configuration of the end-to-end scenario, with a few additional bits of detail. The EPC has multiple subcomponents, including an MME (Mobility Management Entity), an HSS (Home Subscriber Server), and an S/PGW (Session/Packet Gateway) pair; the first tracks and manages the movement of UEs throughout the RAN, the second is a database that contains subscriber-related information, and the Gateway pair processes and forwards packets between the RAN and the Internet (it forms the EPC's user plane). We say “one possible configuration” because the cellular standards allow wide variability in how many S/PGWs a given MME is responsible for, making it possible for a single MME to manage mobility across a wide geographic area that is served by multiple central offices. Finally, while not explicitly illustrated in Figure 2.33, it is sometimes the case that the ISP's PON is used to connect the remote BBUs back to the central office.
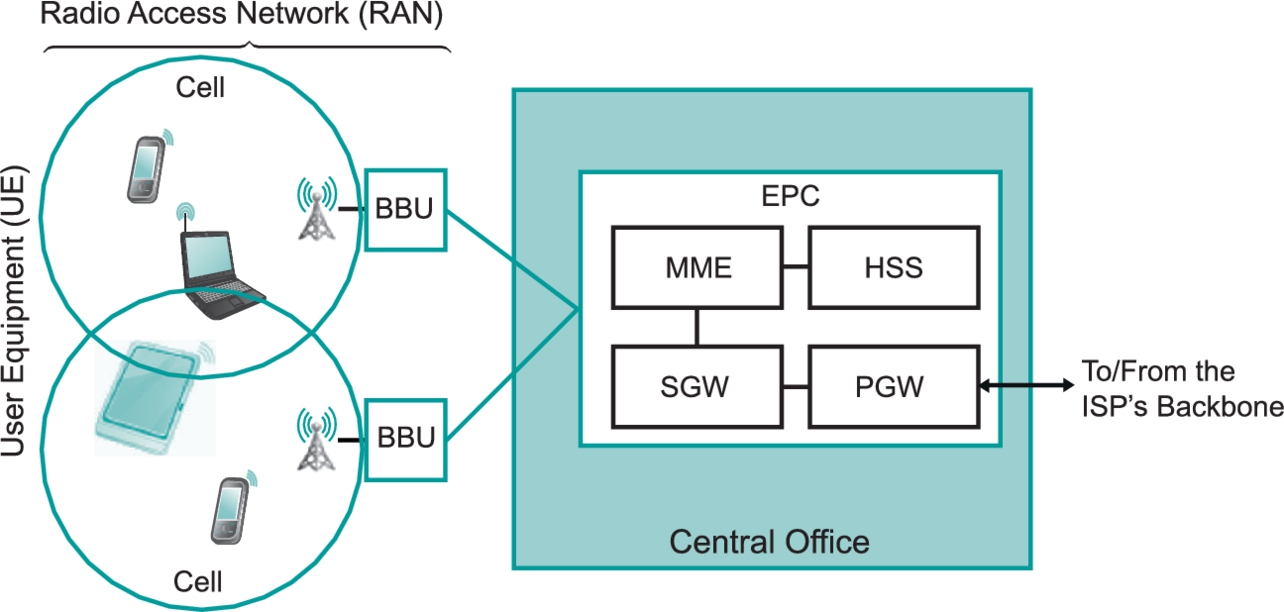
The geographic area served by a BBU's antenna is called a cell. A BBU could serve a single cell or use multiple directional antennas to serve multiple cells. Cells do not have crisp boundaries, and they overlap. Where they overlap, a UE could potentially communicate with multiple BBUs. At any time, however, the UE is in communication with, and under the control of, just one BBU. As the device begins to leave a cell, it moves into an area of overlap with one or more other cells. The current BBU senses the weakening signal from the phone and gives control of the device to whichever base station is receiving the strongest signal from it. If the device is involved in a call or other network session at the time, the session must be transferred to the new base station in what is called a handoff. The decision-making process for handoffs is under the purview of the MME, which has historically been a proprietary aspect of the cellular equipment vendors (although open-source MME implementations are now starting to be available).
There have been multiple generations of protocols implementing the cellular network, colloquially known as 1G, 2G, 3G, and so on. The first two generations supported only voice, with 3G defining the transition to broadband access, supporting data rates measured in hundreds of kilobits per second. Today, the industry is at 4G (supporting data rates of typically a few megabits per second) and is in the process of transitioning to 5G (with the promise of a 10-fold increase in data rates).
As of 3G, the generational designation actually corresponds to a standard defined by the 3GPP (3rd Generation Partnership Project). Even though its name has “3G” in it, the 3GPP continues to define the standard for 4G and 5G, each of which corresponds to a release of the standard. Release 15, which is now published, is considered the demarcation point between 4G and 5G. By another name, this sequence of releases and generations is called LTE, which stands for Long-Term Evolution. The main takeaway is that while standards are published as a sequence of discrete releases, the industry as a whole has been on a fairly well-defined evolutionary path known as LTE. This section uses LTE terminology but highlights the changes coming with 5G when appropriate.
The main innovation of LTE's air interface is how it allocates the available radio spectrum to UEs. Unlike Wi-Fi, which is contention based, LTE uses a reservation-based strategy. This difference is rooted in each system's fundamental assumption about utilization: Wi-Fi assumes a lightly loaded network (and hence optimistically transmits when the wireless link is idle and backs off if contention is detected), while cellular networks assume (and strive for) high utilization (and hence explicitly assign different users to different “shares” of the available radio spectrum).
The state-of-the-art media access mechanism for LTE is called Orthogonal Frequency-Division Multiple Access (OFDMA). The idea is to multiplex data over a set of 12 orthogonal subcarrier frequencies, each of which is modulated independently. The “Multiple Access” in OFDMA implies that data can simultaneously be sent on behalf of multiple users, each on a different subcarrier frequency and for a different duration of time. The subbands are narrow (e.g., 15 kHz), but the coding of user data into OFDMA symbols is designed to minimize the risk of data loss due to interference between adjacent bands.
The use of OFDMA naturally leads to conceptualizing the radio spectrum as a two-dimensional resource, as shown in Figure 2.34. The minimal schedulable unit, called a Resource Element (RE), corresponds to a 15-kHz-wide band around one subcarrier frequency and the time it takes to transmit one OFDMA symbol. The number of bits that can be encoded in each symbol depends on the modulation rate, so, for example, using Quadrature Amplitude Modulation (QAM), 16-QAM yields 4 bits per symbol and 64-QAM yields 6 bits per symbol.

A scheduler makes allocation decisions at the granularity of blocks of 7 × 12 = 84 resource elements, called a Physical Resource Block (PRB). Figure 2.34 shows two back-to-back PRBs, where UEs are depicted by different-colored blocks. Of course, time continues to flow along one axis, and depending on the size of the licensed frequency band, there may be many more subcarrier slots (and hence PRBs) available along the other axis, so the scheduler is essentially scheduling a sequence of PRBs for transmission.
The 1-ms Transmission Time Interval (TTI) shown in Figure 2.34 corresponds to the time frame in which the BBU receives feedback from UEs about the quality of the signal they are experiencing. This feedback, called a Channel Quality Indicator (CQI), essentially reports the observed signal-to-noise ratio, which impacts the UE's ability to recover the data bits. The base station then uses this information to adapt how it allocates the available radio spectrum to the UEs it is serving.
Up to this point, the description of how we schedule the radio spectrum is specific to 4G. The transition from 4G to 5G introduces additional degrees of freedom in how the radio spectrum is scheduled, making it possible to adapt the cellular network to a more diverse set of devices and applications domains.
Fundamentally, 5G defines a family of waveforms—unlike 4G, which specified only one waveform—each optimized for a different band in the radio spectrum.4 The bands with carrier frequencies below 1 GHz are designed to deliver mobile broadband and massive Internet of Things (IoT) services with a primary focus on range. Carrier frequencies between 1 GHz and 6 GHz are designed to offer wider bandwidths, focusing on mobile broadband and mission-critical applications. Carrier frequencies above 24 GHz (mmWaves) are designed to provide superwide bandwidths over short, line-of-sight coverage.
These different waveforms affect the scheduling and subcarrier intervals (i.e., the “size” of the Resource Elements just described).
- ■ For sub-1-GHz bands, 5G allows maximum 50 MHz bandwidths. In this case, there are two waveforms: one with subcarrier spacing of 15 kHz and another of 30 kHz. (We used 15 kHz in the example shown in Figure 2.34.) The corresponding scheduling intervals are 0.5 ms and 0.25 ms, respectively. (We used 0.5 ms in the example shown in Figure 2.34.)
- ■ For 1-GHz to 6-GHz bands, maximum bandwidths go up to 100 MHz. Correspondingly, there are three waveforms, with subcarrier spacings of 15 kHz, 30 kHz, and 60 kHz, corresponding to scheduling intervals of 0.5 ms, 0.25 ms, and 0.125 ms, respectively.
- ■ For millimeter bands, bandwidths may go up to 400 MHz. There are two waveforms, with subcarrier spacings of 60 kHz and 120 kHz. Both have scheduling intervals of 0.125 ms.
This range of options is important because it adds another degree of freedom to the scheduler. In addition to allocating resource blocks to users, it has the ability to dynamically adjust the size of the resource blocks by changing the wave form being used in the band it is responsible for scheduling.
Whether 4G or 5G, the scheduling algorithm is a challenging optimization problem, with the objective of simultaneously (a) maximizing utilization of the available frequency band and (b) ensuring that every UE receives the level of service it requires. This algorithm is not specified by 3GPP but rather is the proprietary intellectual property of the BBU vendors.
PERSPECTIVE: RACE TO THE EDGE
As we start to explore how softwarization is transforming the network, we should recognize that it is the access network that connects homes, businesses, and mobile users to the Internet that isundergoing the most radical change. The fiber-to-the-home andcellular networks described in Section 2.8 are currently constructed from complex hardware appliances (e.g., OLTs, BNGs,BBUs, EPCs). Not only have these devices historically beenclosed and proprietary, but the vendors that sell them havetypically bundled a broad and diverse collection of functionality in each. As a consequence, they have becomeexpensive to build, complicated to operate, and slow tochange.
In response, network operators are actively transitioning from these purpose-built appliances to open software running on commodity servers, switches, andaccess devices. This initiative is often called CORD, whichis an acronym for Central Office Rearchitected as a Datacenter, and as the name suggests, the idea is to buildthe telco central office (or the cable head end, resulting inthe acronym HERD) using exactly the same technologies as inthe large datacenters that make up the cloud.
The motivation for operators to do this is in part to benefit from the cost savings that come from replacing purpose-built appliances with commodity hardware, but it is mostly driven by the need to accelerate the pace of innovation. Their goal is to enable new classes of edge services—e.g., public safety, autonomous vehicles, automated factories, IoT, immersive user interfaces—that benefit from low-latency connectivity to end users and, more importantly, to the increasing number of devices those users surround themselves with. This results in a multitier cloud similar to the one shown in Figure 2.35.

This is all part of the growing trend to move functionality out of the datacenter and closer to the network edge, a trend that puts cloud providers and network operators on a collision course. Cloud providers, in pursuit of low-latency/high-bandwidth applications, are moving out of the datacenter and toward the edge at the same time network operators are adopting the best practices and technologies of the cloud to the edge that already exists and implements the access network. It is impossible to say how this will all play out over time; both industries have their particular advantages.
On the one hand, cloud providers believe that by saturating metro areas with edge clusters and abstracting away the access network, they can build an edge presence with low enough latency and high enough bandwidth to serve the next generation of edge applications. In this scenario, the access network remains a dumb bit-pipe, allowing cloud providers to excel at what they do best: run scalable cloud services on commodity hardware.
On the other hand, network operators believe that by building the next-generation access network using cloud technology, they will be able to colocate edge applications in the access network. This scenario comes with built-in advantages: an existing and widely distributed physical footprint, existing operational support, and native support for both mobility and guaranteed service.
While acknowledging both of these possibilities, there is a third outcome that is not only worth considering but also worth working toward: the democratization of the network edge. The idea is to make the access-edge cloud accessible to anyone and not strictly the domain of incumbent cloud providers or network operators. There are three reasons to be optimistic about this possibility:
- 1. Hardware and software for the access network are becoming commoditized and open. This is a key enabler that we were just talking about. If it helps telcos and cablecos be agile, then it can provide the same value to anyone.
- 2. There is demand. Enterprises in the automotive, factory, and warehouse space increasingly want to deploy private 5G networks for a variety of physical automation use cases (e.g., a garage where a remote valet parks your car or a factory floor making use of automation robots).
- 3. Spectrum is becoming available. 5G is opening up for use in an unlicensed or lightly licensed model in the U.S. and Germany as two prime examples, with other countries soon to follow. This means 5G should have around 100–200 MHz of spectrum available for private use.
In short, the access network has historically been the purview of the telcos, cablecos, and the vendors that sell them proprietary boxes, but the softwarization and virtualization of the access network opens the door for anyone (from smart cities to underserved rural areas to apartment complexes to manufacturing plants) to establish an access-edge cloud and connect it to the public Internet. We expect it to become as easy to do this as it is today to deploy a Wi-Fi router. Doing so not only brings the access-edge into new (edgier) environments but also has the potential to open the access network to developers that instinctively go where there are opportunities to innovate.
Broader Perspective
- ■ To continue reading about the cloudification of the Internet, see the text section Perspective: Virtual Networks All the Way Down.
- ■ To learn more about the transformation taking place in access networks, we recommend: CORD: Central Office Re-architectured as a Datacenter (Peterson, et al., IEEE Communications, Oct 2016) and Democratizing the Network Edge (Peterson, et al., ACM SIGCOMM CCR, April 2019).
Exercises
- 1. Show the NRZ, Manchester, and NRZI encodings for the bit pattern shown in Figure 2.36. Assume that the NRZI signal starts out low.

- 2. Show the 4B/5B encoding and the resulting NRZI signal for the following bit sequence:
- 1110 0101 0000 0011.
- 3. Show the 4B/5B encoding and the resulting NRZI signal for the following bit sequence:
![]()
- 1101 1110 1010 1101 1011 1110 1110 1111.
- 4. In the 4B/5B encoding (Table 2.2), only two of the 5-bit codes used end in two 0s. How many possible 5-bit sequences are there (used by the existing code or not) that meet the stronger restriction of having at most one leading and at most one trailing 0? Could all 4-bit sequences be mapped to such 5-bit sequences?
- 5. Assuming a framing protocol that uses bit stuffing, show the bit sequence transmitted over the link when the frame contains the following bit sequence:
- 110101111101011111101011111110.
- Mark the stuffed bits.
- 6. Suppose the following sequence of bits arrives over a link:
- 1101011111010111110010111110110.
- Show the resulting frame after any stuffed bits have been removed. Indicate any errors that might have been introduced into the frame.
- 7. Suppose the following sequence of bits arrive over a link:
![]()
- 011010111110101001111111011001111110.
- Show the resulting frame after any stuffed bits have been removed. Indicate any errors that might have been introduced into the frame.
- 8. Suppose you want to send some data using a byte-oriented framing protocol, and the last 2 bytes of your data are DLE and ETX. What sequence of bytes would be transmitted immediately prior to the CRC?
- 9. Give an example of a byte/bit sequence that should never appear in a transmission for an HDLC frame.
- 10. Assume that a SONET receiver resynchronizes its clock whenever a 1 bit appears; otherwise, the receiver samples the signal in the middle of what it believes is the bit's timeslot.
- (a) What relative accuracy of the sender's and receiver's clocks is required in order to receive correctly 48 zero-bytes (one ATM AAL5 cell's worth) in a row?
- (b) Consider a forwarding station A on a SONET STS-1 line, receiving frames from the downstream end B and retransmitting them upstream. What relative accuracy of A's and B's clocks is required to keep A from accumulating more than one extra frame per minute?
![]()
- 11. Show that the Internet checksum will never be 0xFFFF (that is, the final value of sum will not be 0x0000) unless every byte in the buffer is 0. (Internet specifications in fact require that a checksum of 0x0000 be transmitted as 0xFFFF; the value 0x0000 is then reserved for an omitted checksum. Note that, in ones' complement arithmetic, 0x0000 and 0xFFFF are both representations of the number 0.)
- 12. Prove the Internet checksum computation shown in the text is independent of byte order (host order or network order) except that the bytes in the final checksum should be swapped later to be in the correct order. Specifically, show that the sum of 16-bit words can be computed in either byte order. For example, if the ones' complement sum (denoted by +') of 16-bit words is represented as [A,B] +' [C,D] +' ⋯ +' [Y,Z], then the following swapped sum is the same as the original sum above: [B,A] +' [D,C] +' ⋯ +' [Z,Y].
- 13. Suppose that one byte in a buffer covered by the Internet checksum algorithm needs to be decremented (e.g., a header hop count field). Give an algorithm to compute the revised checksum without rescanning the entire buffer. Your algorithm should consider whether the byte in question is low order or high order.
- 14. Show that the Internet checksum can be computed by first taking the 32-bit ones' complement sum of the buffer in 32-bit units, then taking the 16-bit ones' complement sum of the upper and lower halfwords, and finishing as before by complementing the result. (To take a 32-bit ones' complement sum on 32-bit twos' complement hardware, you need access to the “overflow” bit.)
![]()
- 15. Suppose we want to transmit the message 11001001 and protect it from errors using the CRC polynomial
 .
.- (a) Use polynomial long division to determine the message that should be transmitted.
- (b) Suppose the leftmost bit of the message is inverted due to noise on the transmission link. What is the result of the receiver's CRC calculation? How does the receiver know that an error has occurred?
- 16. Suppose we want to transmit the message 1011 0010 0100 1011 and protect it from errors using the CRC8 polynomial
 .
.- (a) Use polynomial long division to determine the message that should be transmitted.
- (b) Suppose the leftmost bit of the message is inverted due to noise on the transmission link. What is the result of the receiver's CRC calculation? How does the receiver know that an error has occurred?
![]()
- 17. The CRC algorithm as presented in this chapter requires lots of bit manipulations. It is, however, possible to do polynomial long division taking multiple bits at a time, via a table-driven method, that enables efficient software implementations of CRC. We outline the strategy here for long division 3 bits at a time (see Table 2.4); in practice we would divide 8 bits at a time, and the table would have 256 entries.
Table 2.4
| p | ||
|---|---|---|
| 000 | 000 | 000 000 |
| 001 | 001 | 001 101 |
| 010 | 011 | 010 ____ |
| 011 | 0___ | 011 ____ |
| 100 | 111 | 100 011 |
| 101 | 110 | 101 110 |
| 110 | 100 | 110 ____ |
| 111 | ____ | 111 ____ |
- Let the divisor polynomial
 be
be  , or 1101. To build the table for C, we take each 3-bit sequence, p, append three trailing 0s, and then find the quotient
, or 1101. To build the table for C, we take each 3-bit sequence, p, append three trailing 0s, and then find the quotient  , ignoring the remainder. The third column is the product
, ignoring the remainder. The third column is the product  , the first 3 bits of which should equal p.
, the first 3 bits of which should equal p.- (a) Verify for
 that the quotients
that the quotients  and
and  are the same; that is, it does not matter what the trailing bits are.
are the same; that is, it does not matter what the trailing bits are. - (b) Fill in the missing entries in the table.
- (c) Use the table to divide 101 001 011 001 100 by C. Hint: The first 3 bits of the dividend are
 , so from the table, the corresponding first 3 bits of the quotient are
, so from the table, the corresponding first 3 bits of the quotient are  . Write the 110 above the second 3 bits of the dividend and subtract
. Write the 110 above the second 3 bits of the dividend and subtract  , again from the table, from the first 6 bits of the dividend. Keep going in groups of 3 bits. There should be no remainder.
, again from the table, from the first 6 bits of the dividend. Keep going in groups of 3 bits. There should be no remainder.
- (a) Verify for
- 18. With 1 parity bit, we can detect all 1-bit errors. Show that at least one generalization fails, as follows:
- (a) Show that if messages m are 8 bits long, then there is no error detection code
 of size 2 bits that can detect all 2-bit errors. Hint: Consider the set M of all 8-bit messages with a single 1 bit; note that any message from M can be transmuted into any other with a 2-bit error, and show that some pair of messages
of size 2 bits that can detect all 2-bit errors. Hint: Consider the set M of all 8-bit messages with a single 1 bit; note that any message from M can be transmuted into any other with a 2-bit error, and show that some pair of messages  and
and  in M must have the same error code e.
in M must have the same error code e. - (b) Find an N (not necessarily minimal) such that no 32-bit error detection code applied to N-bit blocks can detect all errors altering up to 8 bits.
- (a) Show that if messages m are 8 bits long, then there is no error detection code
![]()
- 19. Consider an ARQ protocol that uses only negative acknowledgments (NACKs), but no positive acknowledgments (ACKs). Describe what timeouts would need to be scheduled. Explain why an ACK-based protocol is usually preferred to a NACK-based protocol.
- 20. Consider an ARQ algorithm running over a 20-km point-to-point fiber link.
- (a) Compute the propagation delay for this link, assuming that the speed of light is
 m/s in the fiber.
m/s in the fiber. - (b) Suggest a suitable timeout value for the ARQ algorithm to use.
- (c) Why might it still be possible for the ARQ algorithm to time out and retransmit a frame, given this timeout value?
- (a) Compute the propagation delay for this link, assuming that the speed of light is
- 21. Suppose you are designing a sliding window protocol for a 1-Mbps point-to-point link to the moon, which has a one-way latency of 1.25 seconds. Assuming that each frame carries 1 kB of data, what is the minimum number of bits you need for the sequence number?
- 22. Suppose you are designing a sliding window protocol for a 1-Mbps point-to-point link to the stationary satellite evolving around the Earth at
 km altitude. Assuming that each frame carries 1 kB of data, what is the minimum number of bits you need for the sequence number in the following cases? Assume the speed of light is
km altitude. Assuming that each frame carries 1 kB of data, what is the minimum number of bits you need for the sequence number in the following cases? Assume the speed of light is  meters per second.
meters per second.- (a) RWS = 1.
- (b) RWS = SWS.
![]()
- 23. The text suggests that the sliding window protocol can be used to implement flow control. We can imagine doing this by having the receiver delay ACKs, that is, not send the ACK until there is free buffer space to hold the next frame. In doing so, each ACK would simultaneously acknowledge the receipt of the last frame and tell the source that there is now free buffer space available to hold the next frame. Explain why implementing flow control in this way is not a good idea.
- 24. Implicit in the stop-and-wait scenarios of Figure 2.14 is the notion that the receiver will retransmit its ACK immediately on receipt of the duplicate data frame. Suppose instead that the receiver keeps its own timer and retransmits its ACK only after the next expected frame has not arrived within the timeout interval. Draw timelines illustrating the scenarios in Figure 2.14(b)–(d); assume the receiver's timeout value is twice the sender's. Also redraw (c) assuming the receiver's timeout value is half the sender's.
- 25. In stop-and-wait transmission, suppose that both sender and receiver retransmit their last frame immediately on receipt of a duplicate ACK or data frame; such a strategy is superficially reasonable because receipt of such a duplicate is most likely to mean the other side has experienced a timeout.
- (a) Draw a timeline showing what will happen if the first data frame is somehow duplicated but no frame is lost. How long will the duplications continue? This situation is known as the Sorcerer's Apprentice bug.
- (b) Suppose that, like data, ACKs are retransmitted if there is no response within the timeout period. Suppose also that both sides use the same timeout interval. Identify a reasonably likely scenario for triggering the Sorcerer's Apprentice bug.
- 26. Give some details of how you might augment the sliding window protocol with flow control by having ACKs carry additional information that reduces the SWS as the receiver runs out of buffer space. Illustrate your protocol with a timeline for a transmission; assume the initial SWS and RWS are 4, the link speed is instantaneous, and the receiver can free buffers at the rate of one per second (i.e., the receiver is the bottleneck). Show what happens at
 seconds.
seconds. - 27. Describe a protocol combining the sliding window algorithm with selective ACKs. Your protocol should retransmit promptly, but not if a frame simply arrives one or two positions out of order. Your protocol should also make explicit what happens if several consecutive frames are lost.
- 28. Draw a timeline diagram for the sliding window algorithm with
 frames for the following two situations. Use a timeout interval of about
frames for the following two situations. Use a timeout interval of about  .
.- (a) Frame 4 is lost.
- (b) Frames 4–6 are lost.
- 29. Draw a timeline diagram for the sliding window algorithm with SWS = RWS = 4 frames in the following two situations. Assume the receiver sends a duplicate acknowledgment if it does not receive the expected frame. For example, it sends DUPACK[2] when it expects to see Frame[2] but receives Frame[3] instead. Also, the receiver sends a cumulative acknowledgment after it receives all the outstanding frames. For example, it sends ACK[5] when it receives the lost frame Frame[2] after it already received Frame[3], Frame[4], and Frame[5]. Use a timeout interval of about 2 × RTT.
- (a) Frame 2 is lost. Retransmission takes place upon timeout (as usual).
- (b) Frame 2 is lost. Retransmission takes place either upon receipt of the first DUPACK or upon timeout. Does this scheme reduce the transaction time? (Note that some end-to-end protocol [e.g., variant of TCP] uses a similar scheme for fast retransmission.)
![]()
- 30. Suppose that we attempt to run the sliding window algorithm with and with
 . The Nth packet DATA[N] thus actually contains N mod 5 in its sequence number field. Give an example in which the algorithm becomes confused; that is, a scenario in which the receiver expects DATA[5] and accepts DATA[0]—which has the same transmitted sequence number—in its stead. No packets may arrive out of order. Note this implies
. The Nth packet DATA[N] thus actually contains N mod 5 in its sequence number field. Give an example in which the algorithm becomes confused; that is, a scenario in which the receiver expects DATA[5] and accepts DATA[0]—which has the same transmitted sequence number—in its stead. No packets may arrive out of order. Note this implies  is necessary as well as sufficient.
is necessary as well as sufficient. - 31. Consider the sliding window algorithm with , with no out-of-order arrivals, and with infinite-precision sequence numbers.
- (a) Show that if DATA[6] is in the receive window, then DATA[0] (or in general any older data) cannot arrive at the receiver (and hence that
 would have sufficed).
would have sufficed). - (b) Show that if ACK[6] may be sent (or, more literally, that DATA[5] is in the sending window), then ACK[2] (or earlier) cannot be received.
 . Note that part (b) implies that the scenario of the previous problem cannot be reversed to involve a failure to distinguish ACK[0] and ACK[5].
. Note that part (b) implies that the scenario of the previous problem cannot be reversed to involve a failure to distinguish ACK[0] and ACK[5]. - (a) Show that if DATA[6] is in the receive window, then DATA[0] (or in general any older data) cannot arrive at the receiver (and hence that
- 32. Suppose that we run the sliding window algorithm with
 and
and  , and no out-of-order arrivals.
, and no out-of-order arrivals.- (a) Find the smallest value for MaxSeqNum. You may assume that it suffices to find the smallest MaxSeqNum such that if DATA[MaxSeqNum] is in the receive window, then DATA[0] can no longer arrive.
- (b) Give an example showing that
 is not sufficient.
is not sufficient. - (c) State a general rule for the minimum MaxSeqNum in terms of SWS and RWS.
- 33. Suppose A is connected to B via an intermediate router R, as shown in Figure 2.37. The A–R and R–B links each accept and transmit only one packet per second in each direction (so two packets take 2 seconds), and the two directions transmit independently. Assume A sends to B using the sliding window protocol with
 .
.- (a) For
 , state what packets arrive at and leave each node, or label them on a timeline.
, state what packets arrive at and leave each node, or label them on a timeline. - (b) What happens if the links have a propagation delay of 1.0 seconds but accept immediately as many packets as are offered (i.e.,
 second but bandwidth is infinite)?
second but bandwidth is infinite)?
- (a) For

- 34. Suppose A is connected to B via an intermediate router R, as in the previous problem. The A–R link is instantaneous, but the R–B link transmits only one packet each second, one at a time (so two packets take 2 seconds). Assume A sends to B using the sliding window protocol with . For
 , state what packets arrive at and are sent from A and B. How large does the queue at R grow?
, state what packets arrive at and are sent from A and B. How large does the queue at R grow? - 35. Consider the situation in the previous exercise, except this time, assume that the router has a queue size of 1; that is, it can hold one packet in addition to the one it is sending (in each direction). Let A's timeout be 5 seconds, and let SWS again be 4. Show what happens at each second from
 until all four packets from the first window-full are successfully delivered.
until all four packets from the first window-full are successfully delivered. - 36. Why is it important for protocols configured on top of the Ethernet to have a length field in their header, indicating how long the message is?
- 37. What kind of problems can arise when two hosts on the same Ethernet share the same hardware address? Describe what happens and why that behavior is a problem.
- 38. The 1982 Ethernet specification allowed between any two stations up to 1500 m of coaxial cable, 1000 m of other point-to-point link cable, and two repeaters. Each station or repeater connects to the coaxial cable via up to 50 m of “drop cable.” Typical delays associated with each device are given in Table 2.5 (where
 of light in a
of light in a  m/s). What is the worst-case round-trip propagation delay, measured in bits, due to the sources listed? (This list is not complete; other sources of delay include sense time and signal rise time.)
m/s). What is the worst-case round-trip propagation delay, measured in bits, due to the sources listed? (This list is not complete; other sources of delay include sense time and signal rise time.)
Table 2.5
| Item | Delay |
|---|---|
| Coaxial cable | Propagation speed 0.77c |
| Link/drop cable | Propagation speed 0.65c |
| Repeaters | Approximately 0.6 μs each |
| Transceivers | Approximately 0.2 μs each |
- 39. Coaxial cable Ethernet was limited to a maximum of 500 m between repeaters, which regenerate the signal to 100% of its original amplitude. Along one 500-m segment, the signal could decay to no less than 14% of its original value (8.5 dB). Along 1500 m, then, the decay might be
 %. Such a signal, even along 2500 m, is still strong enough to be read; why then are repeaters required every 500 m?
%. Such a signal, even along 2500 m, is still strong enough to be read; why then are repeaters required every 500 m?
![]()
- 40. Suppose the round-trip propagation delay for Ethernet is 46.4 μs. This yields a minimum packet size of 512 bits (464 bits corresponding to propagation
 bits of jam signal).
bits of jam signal).- (a) What happens to the minimum packet size if the delay time is held constant and the signaling rate rises to 100 Mbps?
- (b) What are the drawbacks to so large a minimum packet size?
- (c) If compatibility were not an issue, how might the specifications be written so as to permit a smaller minimum packet size?
- 41. Let A and B be two stations attempting to transmit on an Ethernet. Each has a steady queue of frames ready to send; A's frames will be numbered
 ,
,  , and so on, and B's similarly. Let
, and so on, and B's similarly. Let  μs be the exponential backoff base unit.
μs be the exponential backoff base unit.
![]()
- Suppose A and B simultaneously attempt to send frame 1, collide, and happen to choose backoff times of
 and
and  , respectively, meaning A wins the race and transmits while B waits. At the end of this transmission, B will attempt to retransmit
, respectively, meaning A wins the race and transmits while B waits. At the end of this transmission, B will attempt to retransmit  while A will attempt to transmit . These first attempts will collide, but now A backs off for either or , while B backs off for time equal to one of
while A will attempt to transmit . These first attempts will collide, but now A backs off for either or , while B backs off for time equal to one of  .
.- (a) Give the probability that A wins this second backoff race immediately after this first collision; that is, A's first choice of backoff time
 is less than B's.
is less than B's. - (b) Suppose A wins this second backoff race. A transmits
 , and when it is finished, A and B collide again as A tries to transmit
, and when it is finished, A and B collide again as A tries to transmit  and B tries once more to transmit . Give the probability that A wins this third backoff race immediately after the first collision.
and B tries once more to transmit . Give the probability that A wins this third backoff race immediately after the first collision. - (c) Give a reasonable lower bound for the probability that A wins all the remaining backoff races.
- (d) What then happens to the frame ?
- (a) Give the probability that A wins this second backoff race immediately after this first collision; that is, A's first choice of backoff time
- 42. Suppose the Ethernet transmission algorithm is modified as follows: after each successful transmission attempt, a host waits one or two slot times before attempting to transmit again and otherwise backs off the usual way.
- (a) Explain why the capture effect of the previous exercise is now much less likely.
- (b) Show how the strategy above can now lead to a pair of hosts capturing the Ethernet, alternating transmissions, and locking out a third.
- (c) Propose an alternative approach, for example, by modifying the exponential backoff. What aspects of a station's history might be used as parameters to the modified backoff?
- 43. Ethernets use Manchester encoding. Assuming that hosts sharing the Ethernet are not perfectly synchronized, why does this allow collisions to be detected soon after they occur, without waiting for the CRC at the end of the packet?
- 44. Suppose A, B, and C all make their first carrier sense, as part of an attempt to transmit, while a fourth station D is transmitting. Draw a timeline showing one possible sequence of transmissions, attempts, collisions, and exponential backoff choices. Your timeline should also meet the following criteria: (i) initial transmission attempts should be in the order A, B, C, but successful transmissions should be in the order C, B, A, and (ii) there should be at least four collisions.
- 45. Repeat the previous exercise, now with the assumption that Ethernet is p-persistent with
 (that is, a waiting station transmits immediately with probability p when the line goes idle and otherwise defers one 51.2-μs slot time and repeats the process). Your timeline should meet criterion (i) of the previous problem, but in lieu of criterion (ii), you should show at least one collision and at least one run of four deferrals on an idle line. Again, note that many solutions are possible.
(that is, a waiting station transmits immediately with probability p when the line goes idle and otherwise defers one 51.2-μs slot time and repeats the process). Your timeline should meet criterion (i) of the previous problem, but in lieu of criterion (ii), you should show at least one collision and at least one run of four deferrals on an idle line. Again, note that many solutions are possible. - 46. Suppose Ethernet physical addresses are chosen at random (using true random bits).
- (a) What is the probability that on a 1024-host network, two addresses will be the same?
- (b) What is the probability that the above event will occur on some one or more of 220 networks?
- (c) What is the probability that of the 230 hosts in all the networks of (b), some pair has the same address?
 of having a different birthday from the first, the third has probability
of having a different birthday from the first, the third has probability  of having a different birthday from the first two, and so on. The probability all birthdays are different is thus
of having a different birthday from the first two, and so on. The probability all birthdays are different is thus

- which for smallish N is about
![]()
- 47. Suppose five stations are waiting for another packet to finish on an Ethernet. All transmit at once when the packet is finished and collide.
- (a) Simulate this situation up until the point when one of the five waiting stations succeeds. Use coin flips or some other genuine random source to determine backoff times. Make the following simplifications: ignore interframe spacing, ignore variability in collision times (so that retransmission is always after an exact integral multiple of the 51.2-μs slot time), and assume that each collision uses up exactly one slot time.
- (b) Discuss the effect of the listed simplifications in your simulation versus the behavior you might encounter on a real Ethernet.
- 48. Write a program to implement the simulation discussed above, this time with N stations waiting to transmit. Again, model time as an integer, T, in units of slot times, and again, treat collisions as taking one slot time (so a collision at time T followed by a backoff of
 would result in a retransmission attempt at time
would result in a retransmission attempt at time  ). Find the average delay before one station transmits successfully, for
). Find the average delay before one station transmits successfully, for  ,
,  , and
, and  . Do your data support the notion that the delay is linear in N? Hint: For each station, keep track of that station's NextTimeToSend and CollisionCount. You are done when you reach a time T for which there is only one station with NextTimeToSend == T. If there is no such station, increment T. If there are two or more, schedule the retransmissions and try again.
. Do your data support the notion that the delay is linear in N? Hint: For each station, keep track of that station's NextTimeToSend and CollisionCount. You are done when you reach a time T for which there is only one station with NextTimeToSend == T. If there is no such station, increment T. If there are two or more, schedule the retransmissions and try again. - 49. Suppose that N Ethernet stations, all trying to send at the same time, require
 slot times to sort out who transmits next. Assuming the average packet size is 5 slot times, express the available bandwidth as a function of N.
slot times to sort out who transmits next. Assuming the average packet size is 5 slot times, express the available bandwidth as a function of N. - 50. Consider the following Ethernet model. Transmission attempts are made at random times with an average spacing of λ slot times; specifically, the interval between consecutive attempts is an exponential random variable
 , where u is chosen randomly in the interval
, where u is chosen randomly in the interval  . An attempt at time t results in a collision if there is another attempt in the range from
. An attempt at time t results in a collision if there is another attempt in the range from  to
to  , where t is measured in units of the 51.2-μs slot time; otherwise the attempt succeeds.
, where t is measured in units of the 51.2-μs slot time; otherwise the attempt succeeds.- (a) Write a program to simulate, for a given value of λ, the average number of slot times needed before a successful transmission, called the contention interval. Find the minimum value of the contention interval. Note that you will have to find one attempt past the one that succeeds in order to determine if there was a collision. Ignore retransmissions, which probably do not fit the random model above.
- (b) The Ethernet alternates between contention intervals and successful transmissions. Suppose the average successful transmission lasts 8 slot times (512 bytes). Using your minimum length of the contention interval from above, what fraction of the theoretical 10-Mbps bandwidth is available for transmissions?
- 51. How can a wireless node interfere with the communications of another node when the two nodes are separated by a distance greater that the transmission range of either node?
- 52. Why might a mesh topology be superior to a base station topology for communications in a natural disaster?
- 53. Suppose a single computer is capable of generating output data at a rate higher than Bluetooth's bandwidth. If the computer were equipped with two or more Bluetooth masters, each with its own slaves, would that work?
- 54. When a cell phone moves from an area served exclusively by a single base station to an area where the cells of several base stations overlap, how is it determined which base station will control the phone?
- 55. Why is it important that nodes in sensor nets consume very little power?
- 56. Why is it not practical for each node in a sensor net to learn its location by using GPS? Describe a practical alternative.