1997
First Rover on Mars
The NASA Viking lander missions were unquestionable successes in the exploration of Mars, but they provided at least two important lessons for the future: first, it would be scientifically better to have mobility on the planet’s surface, rather than having to stay at one fixed landing site; and second, it would be better economically to be able to explore a planetary surface for much less than the multibillion-dollar cost of a flagship-class mission such as Viking.
Both those lessons were taken to heart as part of NASA’s third attempted Mars landing mission, called Mars Pathfinder. Launched in 1996, Mars Pathfinder was one of the first of NASA’s new “better, faster, cheaper” Discovery-class missions, with a cost target of only 10–20 percent of the cost of the original Viking missions. Not only was the team tasked with landing a spacecraft on Mars for this lower cost, they also had to accommodate and operate a small rover as part of the mission, to demonstrate the advantages of having mobility on the Red Planet.
Using a novel (and risky) airbag-assisted landing system, Pathfinder successfully landed on Mars on July 4, 1997, and deployed a small rover named Sojourner (after the nineteenth-century African American abolitionist and women’s rights advocate Sojourner Truth) shortly thereafter. For nearly three months the Pathfinder lander and Sojourner rover obtained images and chemical data on rocks and soils at the mission’s landing site in Ares Vallis, an ancient Martian outflow channel that is thought to have been the site of a catastrophic flood early in the planet’s history. Evidence for the region’s watery past was provided by a variety of geologic and geochemical clues obtained during the mission.
The Sojourner rover, moving at a top speed of about 0.022 miles per hour (1 centimeter per second), only traveled about 330 feet (100 meters) along a circuitous path around the lander during the mission’s 83-Martian-day duration. Still, it was a remarkable demonstration of the value of mobility in robotic exploration, as the rover was able to photograph and chemically sample a much wider variety of rocks and soils at the site than the lander alone could have. The successful basic design and operation principles for Mars roving demonstrated by Sojourner were essentially scaled up by about a factor of three to create the next-generation Mars Exploration Rovers, Spirit and Opportunity, which landed on Mars in 2004.
SEE ALSO Mars (c. 4.5 Billion BCE), Vikings on Mars (1976), Life on Mars? (1996), Mars Global Surveyor (1997), Spirit and Opportunity on Mars (2004), Mars Science Laboratory Curiosity Rover (2012).
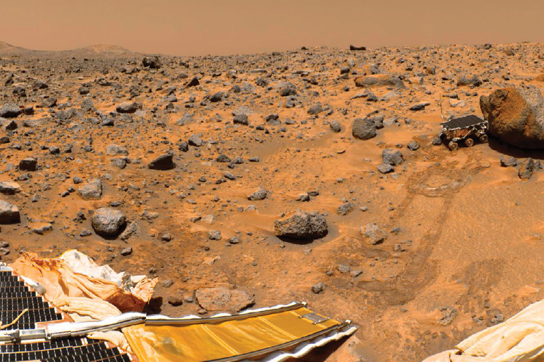
NASA’s Sojourner rover, about the size of a microwave oven, nuzzles up to a rock called Yogi to acquire a measurement of the rock’s elemental chemistry during the summer of 1997.