Pattern Classification and Its Applications to Control of Biomechatronic Systems
Abstract
This chapter presents a new approach to identify, classify, and control biomechatronic systems, which are controlled via superficial electromyographic signals generated by the upper limbs. Electromyographic data are recorded while the hand of subjects is constricted to grasps a set of spheres with a small variation in diameter. Five muscles are monitored with noninvasive electrodes placed on the skin of volunteers while a set of grasp–hold–relax tasks are carried out randomly. A preprocess stage is performed to extract time domain features from the data, with the purpose of addressing both the course of dimensionality and the issues related to the nonstationary behavior of electromyographic signals. A pattern recognition module is used to classify the data and to assign the extracted features to categories corresponding to each sphere grasped. A tracking generator is proposed using artificial neural networks, which are trained to learn the dynamics of finger motions. The performance of the methodology is evaluated in simulations and via real-time implementation with an embedded system.
Keywords
Biomechatronics; Electromyography; Myoelectric control systems
11.1 Introduction
Biomedical (BM) signals are generated by the activity of living beings and they are manifested as electrical or magnetic phenomena that can be recorded and analyzed. They constitute a rich source of data that encode important information about the living organ that generates such information.
Particularly in human beings, electrocardiography (ECG), electroencephalography (EEG), and electromyography (EMG) are examples of techniques developed to record the electrical activity of heart, brain, and muscles, respectively. The BM signals generated by ECG, EEG, and EMG techniques are mostly used to diagnose various diseases. However, in the last decade, an enormous amount of research has been done regarding the use of BM signals to develop human machine interfaces (HMIs) [18,11]. It is impossible to cover the vast number of applications related to BM signals. However, of the three techniques described above, EMG stands out for its applicability in the design of biomechatronic (BioM) systems.
BioM is concerned with the integration of biology disciplines into traditional mechatronics [24], i.e., BioM is related to the research and design of devices which integrate biology disciplines with mechanics, electronics, and control technology with assistive, diagnostic, or therapeutic purposes, or even to augment or to enhance human capabilities.
This chapter presents a methodology to process EMG signals in order to design a pattern classification module and to develop a BioM system capable of studying the finger movements of the human hand. The proposed approach is constituted by the following components:
- • a neural network control module;
- • a pattern classification module;
- • a preprocessing module;
- • an embedded system platform used as a testbed and a brushless DC motor as a servo mechanism.
The BioM system is designed to control brushless DC motors from myoelectric signals obtained from the forearm of healthy subjects. The EMG technique is employed to acquire and record the signals generated by five superficial muscles of the forearm; a preprocessing stage is carried out via Matlab and a control system is developed to generate trajectories applied to control brushless DC motors. The approach is tested both in simulation and in real-time via an embedded servo system developed in our laboratory. A key subject in the development of advanced BioM human machine interfaces based on EMG signals is the processing technique employed. EMG is an experimental technique concerned with the development, recording, and analysis of myoelectric signals. Myoelectric signals are formed by physiological variations in the state of muscle fiber membranes.
11.2 Biomechatronic System Components
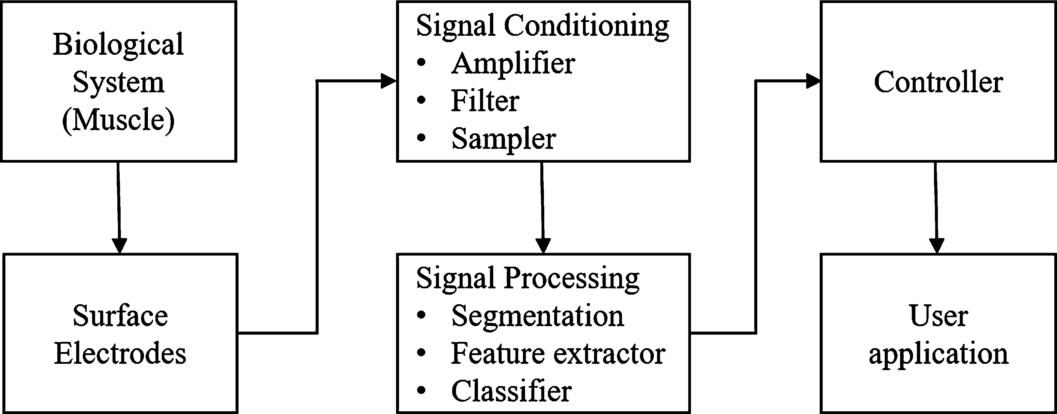
The monitoring of muscle activity opens a vast panorama of lines of research to develop applications in various fields of engineering. Especially the development of control systems based on EMG signals has grown enormously in recent years [23,25,26]. A particular case of BioM systems is the so-called myoelectric control system, which uses exclusively EMG signals as inputs to design a control system. A myoelectric control system [3] is constituted by the following modules: a biological system, surface electrodes, signal conditioning, and signal processing.
11.2.1 Biological System
The electrical manifestation of the neuromuscular activation is directly related with muscle contraction. The myoelectric signals generated by muscle contraction can be detected by two types of electrodes: one type is located on the skin surface, the other is inserted as a needle electrode. The signals recorded by means of the first technique are called superficial EMG (sEMG) signals. We use sEMG signals because this technique is less invasive for the user and the experiments can be done in a regular facility or laboratory without medical requirements.
11.2.2 Surface Electrodes
Electrodes consists of a metal detection surface that detects the electric current on the skin. Some electrodes include amplifier circuits with high input impedance; others are simple passive electrodes that adhere to the skin with specialized adhesive. The location of the electrodes plays a crucial role in EMG studies; considerations such as signal/noise ratio, signal reliability, and cross-talk must be taken into consideration to locate electrodes in the muscle of interest [14].
11.2.3 Signal Conditioning
This block is constituted by at least the following components:
- • amplifier;
- • filter;
- • sampler.
The electrical manifestation of muscles goes from microvolts to millivolts; therefore, an amplifier stage is required to raise the magnitude of the signal to an adequate value.
11.2.4 Signal Processing
This block comprises three functional subprocesses:
- • data segmentation;
- • feature extraction;
- • classification.
11.2.4.1 Data Segmentation
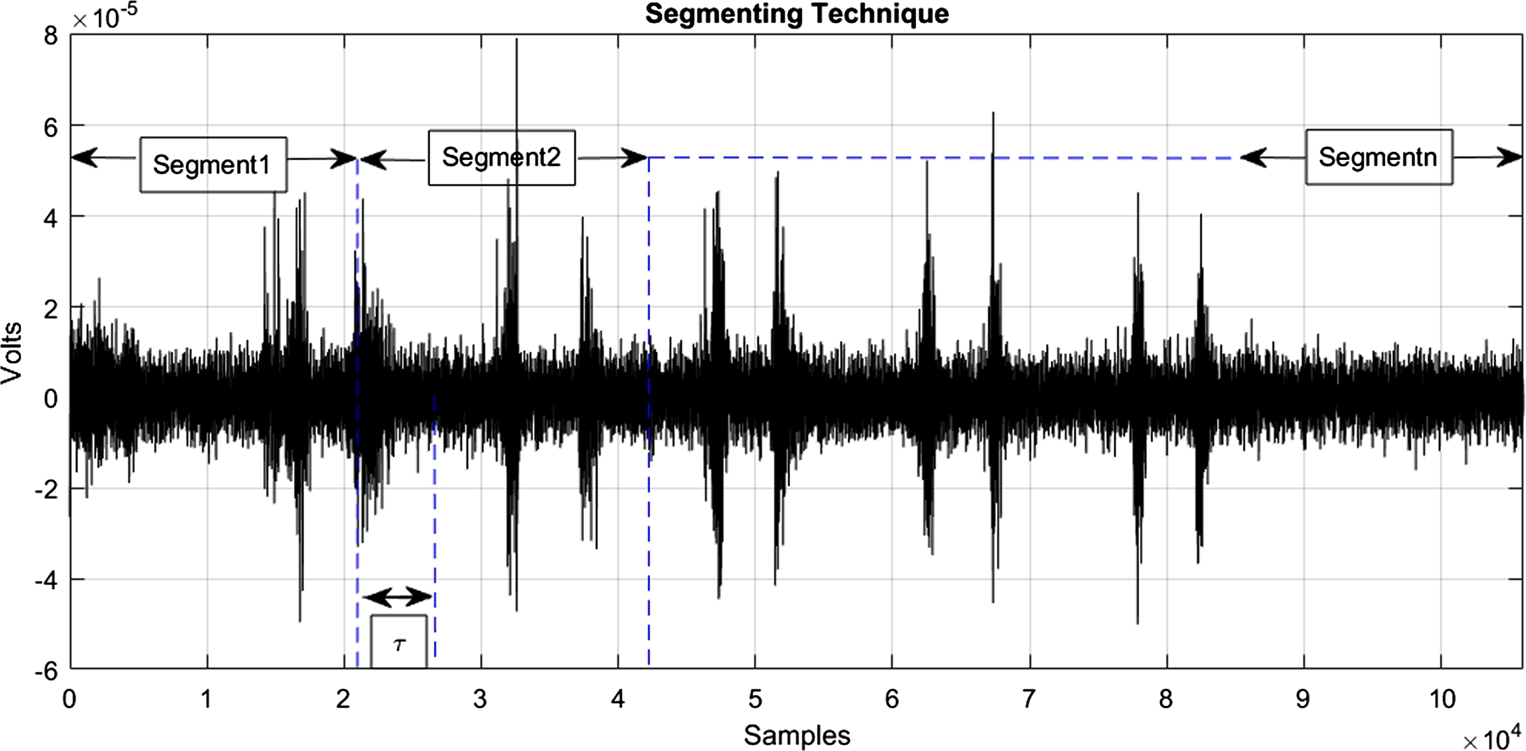
Studies performed by [10] highlighted the importance of segmenting the raw sEMG signal into time slots in order to extract features of myoelectric data. There are two popular techniques to segment raw sEMG data: adjacent windowing and overlapped windowing techniques [10]. In the first case, adjacent disjoint data segments with a predetermined size are used for feature extraction; with this technique, a processing delay is introduced after which each classified pattern emerges. In Fig. 11.1, the adjacent windowing technique is illustrated. The processing time delay is also depicted.
11.2.4.2 Feature Extraction
It is impractical to feed the classifier with the raw signal due to the large amount of data and the stochastic and nonstationarity nature of any biomedical signal. Instead, segmented data are mapped into a lower dimension feature vector whose entries are the features of the signal. According to the literature, features can be categorized in three groups: time frequency (TF), frequency, and time domain (TD) [27].
TD features are the ones most used in myoelectric classification due to their comparative computational simplicity, which in turn allows them to be implemented in real-time more easily. For the sake of completeness TD features are described as follows.
Mean of the Absolute Value
A calculation for mean absolute value (MAV) of the signal in segment i with N samples in length is given by
where N is the total number of data points in a window segment, whose length is determined by the sampling frequency, and ![]() is an EMG data value.
is an EMG data value.
Root Mean Square
Root mean square (RMS) measures the signal energy, providing a strong measure of the information content of the signal. It is defined as
Variance
Variance (VAR) is a representation of EMG signal power, it is related to the force developed by the muscle, and it is defined as
Zero Crossing
Zero crossing is the number of times that the waveform crosses zero; it is calculated for two consecutive samples given. Zero crossing increases if the following condition is fulfilled:
Waveform Length
The waveform length gives information relative to the cumulative length of the waveform over the time segment and is defined as
Willison Amplitude
This feature represents, for every two consecutive data points, the number of times that the magnitude of the difference exceeds a threshold value. The Willison amplitude correlates to muscle contraction levels. It is defined as
where
Energy
The area under the curve for two consecutive samples is determined as
where Fs is the sampling frequency.
Average Power
The average power (P) of a sequence with N samples is defined as
On the other hand, the TF representation of features allows to obtain a more accurate description of the physical phenomenon because TF analysis can localize the energy of the signal in both time and frequency. However, TF features are generally computationally expensive, which is a serious restriction in real-time applications. Therefore, linear, discrete TFs, such as short-time Fourier transform (STFT), wavelet transform (WT), and wavelet packet transform (WPT), are selected to extract features from EMG signals.
Short-Time Fourier Transform
Given a finite-length sequence ![]() ,
, ![]() , with L as the length of the segment. Then its discrete Fourier transform (DFT) is defined as
, with L as the length of the segment. Then its discrete Fourier transform (DFT) is defined as
where ![]() is the frequency sampling step size. The STFT is obtained as a series of DTFs, indexed with respect to Ts, i.e.,
is the frequency sampling step size. The STFT is obtained as a series of DTFs, indexed with respect to Ts, i.e.,

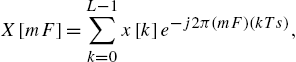
where ![]() is the window function. The advantage of STFT is that it has a well-developed theory and can be computed very efficiently; the main drawback is that it requires each cell in the TF plane to have an identical shape, as depicted in Fig. 11.2.
is the window function. The advantage of STFT is that it has a well-developed theory and can be computed very efficiently; the main drawback is that it requires each cell in the TF plane to have an identical shape, as depicted in Fig. 11.2.
Wavelet Transform
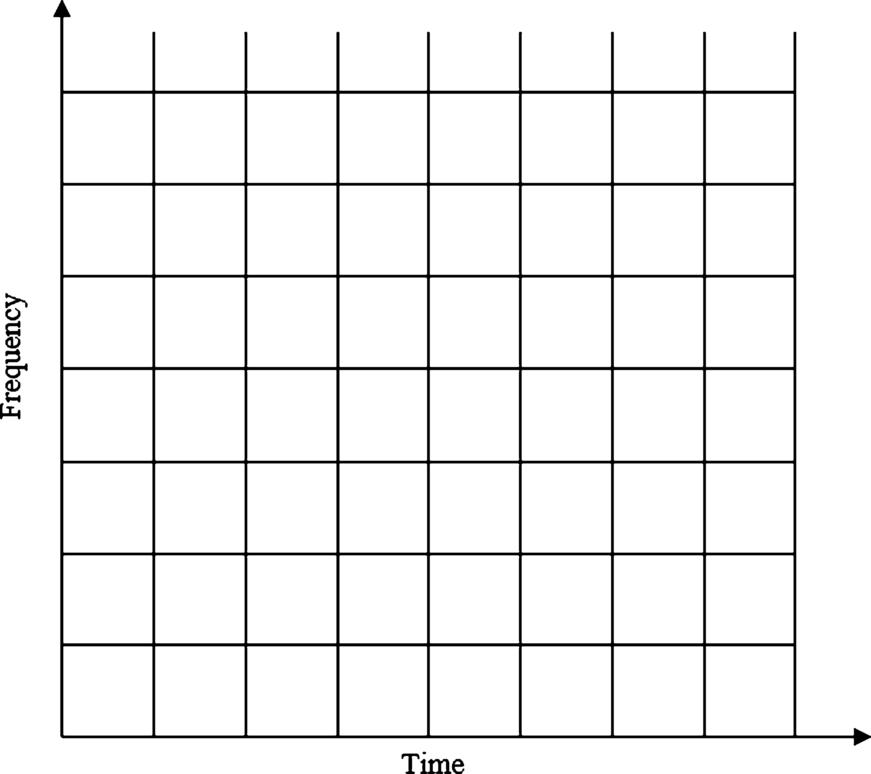
In the WT, by means of a variation in the TF ratio, it is possible to overcome the main drawback of the STFT. Additionally, with a good frequency resolution Δf in low frequencies and a good time localization Δt at high frequencies, it is possible to produce a tiling of the time–frequency plane that is appropriate for most BM signals (Fig. 11.3).
The continuous WT is defined as
where ![]() represents the mother wavelet.
represents the mother wavelet.
Wavelet Packet Transform
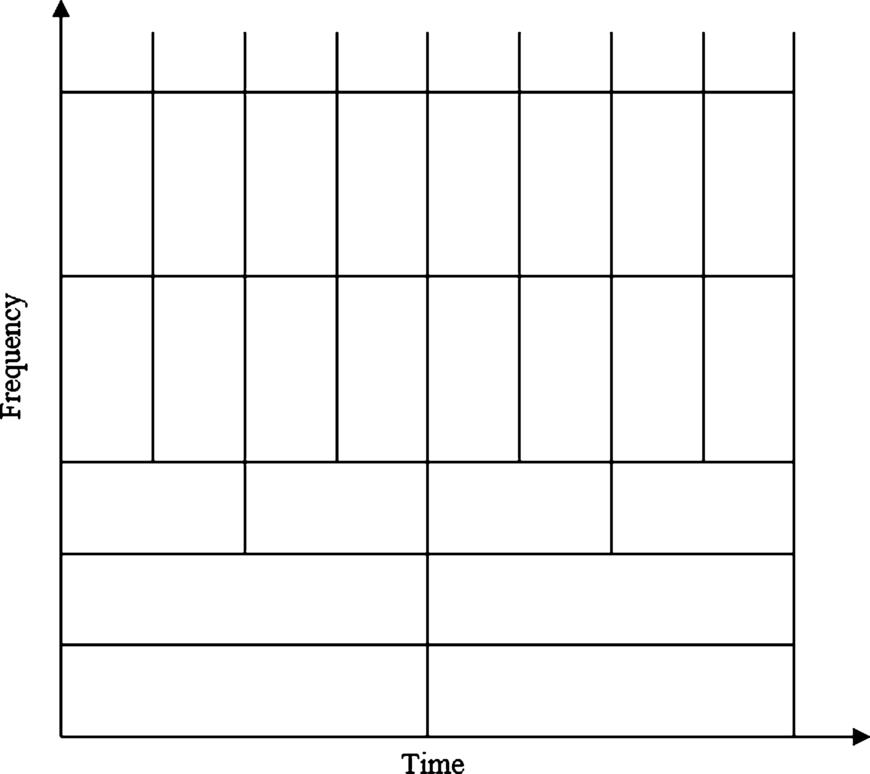
The WPT is a generalized version of the continuous WT and the discrete WT. The tiling of the time–frequency plane is configurable, as shown in Fig. 11.4.
A detailed review of the applicability of TF features is reported in [9].
11.2.4.3 Classification
It is well known in the literature that EMG signals are stochastic and nonlinear, with a nonstationary behavior; therefore, the properties of myoelectric signals change over time. Due to the BM nature of myoelectric signals, it is reasonable to expect large variations in the values of a particular feature. Various external factors, such as variations in electrode location, muscular fatigue, muscle tone variation between individuals, gender of subjects, and sweat, cause changes in a signal pattern over time. The pattern classifier must be able to deal with such varying features optimally and overcome overfitting. If real-time requirements must be fulfilled, the classifier processing time should be fast enough to meet real-time constraints.
11.2.5 Controller Deployment and User Application
Real-time constrictions and increasing demands for applications with high performance require a broad integration of technologies in the field of BioM such as powerful actuators, tiny gears, novel sensors, and miniature electronics. Advances in various fields of technology make it possible to integrate, for example, superflat BLDC motors with harmonic drivers and powerful 32-bit processors with smaller MOSFET power drivers. Prostheses, therapeutic and assistive/enhancing devices, requires BioM systems to fulfill requirements such as having a low weight and a small volume, being more human-like, having more flexible communication interfaces, having more manipulation capability, having more flexible stiffness in the joints, instead of rigid gears and linkage transmissions, allowing for high integration with the human body, containing a minimal amount of wires, and being capable of inertial sensing. Hardware architecture should meet high performance. Examples of powerful embedded systems are FPGAs, DSPs, and microcontrollers [16]. The building blocks of a myocontrol system are shown in Fig. 11.5.
11.2.6 Neural Network Control
Recurrent high-order neural networks (RHONNs) can be represented by
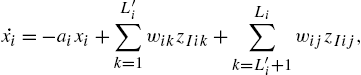
where ![]() ,
, ![]() is the state of the neuron,
is the state of the neuron, ![]() are the synaptic weights, and
are the synaptic weights, and ![]() are multiplicative terms of sigmoidal functions of x or u. On the other hand,
are multiplicative terms of sigmoidal functions of x or u. On the other hand, ![]() are fixed weights, which allow us to incorporate a priori information about the structure of the mapping that we wish to model,
are fixed weights, which allow us to incorporate a priori information about the structure of the mapping that we wish to model, ![]() are functions of x or of u,
are functions of x or of u, ![]() is the number of synaptic weights, and
is the number of synaptic weights, and ![]() is the number of neural connections of the ith neuron. The properties of (11.12) as identification and control scheme as well as its digital implementation have been widely described in works such as [5,4,2].
is the number of neural connections of the ith neuron. The properties of (11.12) as identification and control scheme as well as its digital implementation have been widely described in works such as [5,4,2].
11.3 Biomechatronic System Proposed
One of the main challenges in myoelectric control is to classify the signals issued by muscles, as they exhibit nonstationary behavior. Current approaches use myoelectric signals to characterize the position of the hand, where fingers are located in very well distinguishable positions. In [22], a study to decode individual flexion and extension movements of fingers is presented with 90% accuracy. They employed TD features to feed a multilayer perceptron used to classify 12 movements. Reference [15] presents a strategy to classify finger motion applied to movement recognition for Indonesian sign language systems, where a multimodal controller is developed to deal with uncertainties with individual variations in performing sign language. A naive Bayes classifier is implemented which reaches classification rates up to 98%. Another application for finger motion classifications can be found in [17], where a method for predicting individual finger movements from surface EMG is presented. They use just one TD feature, the mean average value, to develop a linear model of EMG feature dynamics, and Bayesian inference is used as classifier.
However, those approaches fail in characterizing small changes in finger movements. To the best of our knowledge, there are no reports in the literature on any methodology to study finger movements, whose angular motion varies with a small desired value. In the next sections, a method to distinguish several finger positions with very low mechanical fluctuations is presented. The methodology is verified with simulations and with a BioM system designed in our laboratory, which is controlled via superficial EMG signals generated by the forearm.
11.3.1 Problem Formulation
It is well known that in motion control, there are primitive variables such as position (θ), velocity (ω), acceleration (α), jerk (φ), and torque (τ). It is possible to establish such variables as dynamics of electromechanical servo systems [8]. These dynamics can be used to obtain complex motion patterns M, which can be represented as a set of nonlinear functions, i.e.,
Proposition
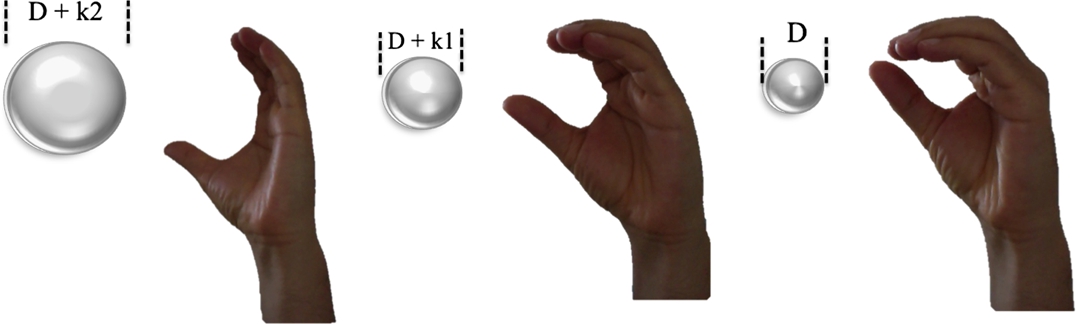
We propose that it is possible to study finger motion by means of simple mechanical variables M in a controlled environment, i.e., a controlled sequence of continuous actions called scenes, as shown in Fig. 11.6. □
In order to study the finger movement in a structured environment, let us introduce the term scene, which is defined here in below. The so-called scenes are constituted by movement sequences as follows.
Let n be a sequence of hand movements. A scene S is formally described as:
- • Sequence 1: Hand performs a movement
 , into an scene S with a period of time
, into an scene S with a period of time  .
. - • Sequence k: Hand performs a movement
 , into a scene S with a duration
, into a scene S with a duration  , where ΔΓ is a structured variation in the Euclidian space (Fig. 11.6).
, where ΔΓ is a structured variation in the Euclidian space (Fig. 11.6). - • Sequence n: Hand performs a movement
 , into a scene S with a duration
, into a scene S with a duration  .
.
Definition
Considering that ![]() terms are described by
terms are described by ![]() plus a differential ΔΓ, the movements are represented as follows:
plus a differential ΔΓ, the movements are represented as follows:
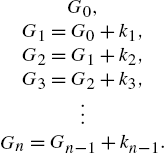
Substituting backward and reordering, (11.15) is represented as
where ![]() . Then, if (11.16) holds, the set S can be defined in terms of a triplet, i.e.,
. Then, if (11.16) holds, the set S can be defined in terms of a triplet, i.e.,
In order to fulfill (11.17), the following definitions are made.
Definition
The differentials ![]() are selected in such way that their values represent the anatomical variation of the subject being studied. □
are selected in such way that their values represent the anatomical variation of the subject being studied. □
Definition
All ![]() terms are not necessary equals, but their sum is always equal to the final pose of fingers. □
terms are not necessary equals, but their sum is always equal to the final pose of fingers. □
As a consequence of the definition of K in (11.16), one can select the finger mechanical variation ![]() as small as possible and then build up a model M as (11.13), according to the
as small as possible and then build up a model M as (11.13), according to the ![]() selected values.
selected values.
In the following sections, the definition of S, which constitutes a scene, is used to develop a structured environment such as grasping spheres with diameters ![]() , which are selected with parameter variation
, which are selected with parameter variation ![]() according to (11.16).
according to (11.16).
The range of movements (ROM) that the human hand can naturally perform is limited by several constraints, which can be grouped into three categories: static, intrafinger, and interfinger [7]. In this study only intrafinger constraints are considered because they are related to movement of flexion/extension of the fingers.
11.3.2 Experimental Preparation
Six healthy able-bodied subjects (four men, two women) aged 20–24 were trained to perform the experiment described in the next subsection. The experiment was conducted in accordance with the normative of the Ethics Committee of our institution; an ethical approval letter from the committee and consent of the volunteers was obtained prior to the experiment. The guidelines established in the surface EMG for the noninvasive assessment of muscles (SENIAM) project were followed (available at http://www.seniam.org).
Data were measured with a Trigno Wireless System (Delsys, Boston, Ma, USA); five channels were used in the experiment. Sampling frequency was set to 2000 Hz with a low-pass filter at 500 Hz; channel amplifiers were included in the experiment. Wireless RF electrodes were located on the arm, which was shaved, cleaned, and scrubbed with alcohol. Fig. 11.7 depicts the muscle electrode placement in the arm; the EMG system employed is illustrated in Fig. 11.8.


The designed experiment considered aspects such as determination of the type and amount of movements of the fingers, the number of participants, and the muscles of the forearm to be included, which will also influence the number of channels and dimensions of the characteristic vector as well as the quantity of objects to grasp by the hand.
11.3.3 Experimental Set-Up
Subjects were instructed to grasp five spheres randomly. The spheres were made of expanded polystyrene with diameters ![]() ,
, ![]() ,
, ![]() ,
, ![]() , and
, and ![]() cm. Volunteers were seated comfortably and performed the requested grabbing of a sphere Di (
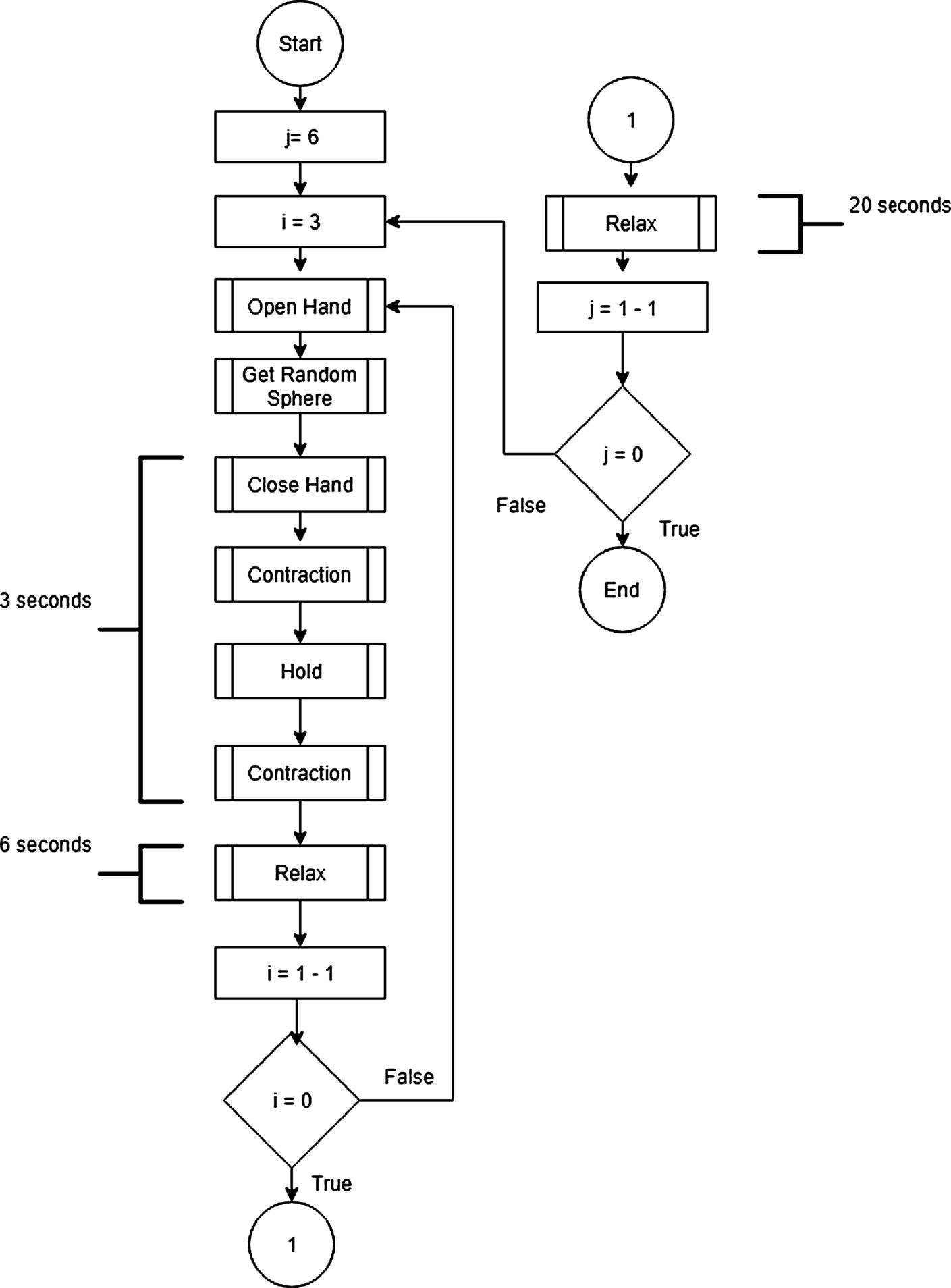
cm. Volunteers were seated comfortably and performed the requested grabbing of a sphere Di (![]() ). Electrodes were located on the following five superficial muscles: flexor carpi radialis, flexor carpi ulnaris, flexor pollicis longus, flexor digitorum profundus, and extensor digitorum [14] (Fig. 11.7). The experiment was organized in batches; each subject performed a batch, which is established as the grasps of five spheres with a span of 5 seconds between each grasp. A relaxing period of 20 seconds between batches was introduced to avoid muscular fatigue. Subjects were prompted to perform six batch repetitions. Five repetitions were used as training data, one was used for validation. In order to synchronize the task of grasping and the recording of signals, subjects were trained to introduce a short contraction at the beginning and at the ending of grasping each sphere. The short contractions are used to get markers that can be easily handled by a maximum peak detector in the capturing system. The whole batch can be summarized by the following tasks (Fig. 11.9):
). Electrodes were located on the following five superficial muscles: flexor carpi radialis, flexor carpi ulnaris, flexor pollicis longus, flexor digitorum profundus, and extensor digitorum [14] (Fig. 11.7). The experiment was organized in batches; each subject performed a batch, which is established as the grasps of five spheres with a span of 5 seconds between each grasp. A relaxing period of 20 seconds between batches was introduced to avoid muscular fatigue. Subjects were prompted to perform six batch repetitions. Five repetitions were used as training data, one was used for validation. In order to synchronize the task of grasping and the recording of signals, subjects were trained to introduce a short contraction at the beginning and at the ending of grasping each sphere. The short contractions are used to get markers that can be easily handled by a maximum peak detector in the capturing system. The whole batch can be summarized by the following tasks (Fig. 11.9):
- • open hand,
- • get sphere,
- • close hand,
- • make a short contraction,
- • hold sphere i,
- • make a short contraction,
- • relax,
- • repeat 1 to 6 three times,
- • relax 20 seconds,
- • repeat steps 1 to 8 thirty times.
Before beginning the experiment, subjects were asked to grasp each sphere, and the angular positions of the fingers were measured with a goniometer. Four finger joints were measured for each sphere: the distal interphalangeal (DIP), proximal interphalangeal (PIP), metacarpophalangeal (MP), and trapezius-metacarpal (CMC) joints. The data for subject F1 are shown in Table 11.1. The grasping spheres (![]() ) order was determined randomly. Table 11.2 shows the grasping sequence order for F1.
) order was determined randomly. Table 11.2 shows the grasping sequence order for F1.
Table 11.1
Joint angles for F1 (degrees).
|
Subject: F1 Weight: 56 kg Age: 22 years Height: 1.64 m |
||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sphere | Thumb | Index | Middle | Ring | Little | |||||||||
| MP | PIP | MP | PIP | DIP | MP | PIP | DIP | MP | PIP | DIP | MP | PIP | DIP | |
| D1 | 25 | 50 | 50 | 40 | 30 | 65 | 50 | 35 | 55 | 50 | 25 | 53 | 33 | 18 |
| D2 | 24 | 45 | 40 | 40 | 25 | 55 | 50 | 30 | 50 | 40 | 25 | 43 | 20 | 20 |
| D3 | 18 | 40 | 40 | 40 | 25 | 55 | 40 | 25 | 40 | 40 | 20 | 50 | 18 | 16 |
| D4 | 15 | 40 | 35 | 30 | 15 | 40 | 40 | 25 | 40 | 28 | 20 | 33 | 15 | 15 |
| D5 | 10 | 35 | 30 | 35 | 25 | 40 | 38 | 18 | 30 | 30 | 18 | 35 | 13 | 15 |
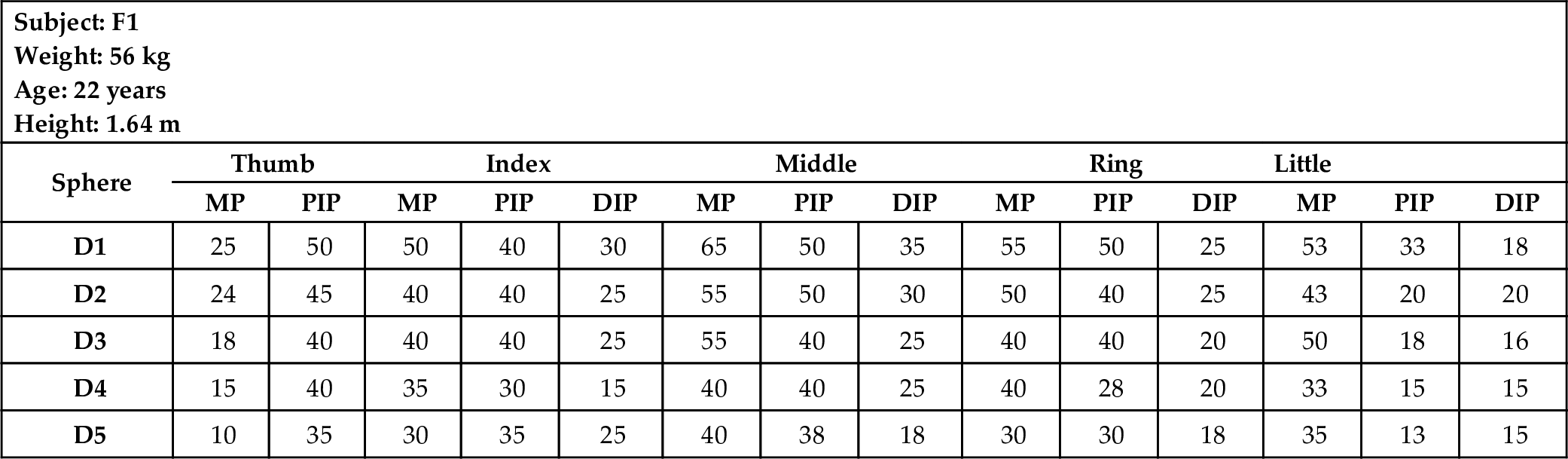
Table 11.2
| Experiment | Sequence of grasping |
|---|---|
| 1 | D1, D3, D4, D2, D5 |
| 2 | D2, D5, D1, D3, D4 |
| 3 | D4, D1, D3, D2, D5 |
| 4 | D3, D1, D2, D5, D4 |
| 5 | D5, D1, D3, D2, D4 |
| 6 | D4, D3, D5, D1, D2 |
11.3.4 Signal Processing
11.3.4.1 Data Segmentation
A segmentation process is performed in order to handle the data before feature extraction. Each sEMG signal is segmented considering a segment length of 256 ms [3]. The DC content of raw data is eliminated and normalized in order to improve the performance of the classifier because TD features are of different orders of magnitude. The min-max approach is selected to map data to ![]() , which is expressed as
, which is expressed as
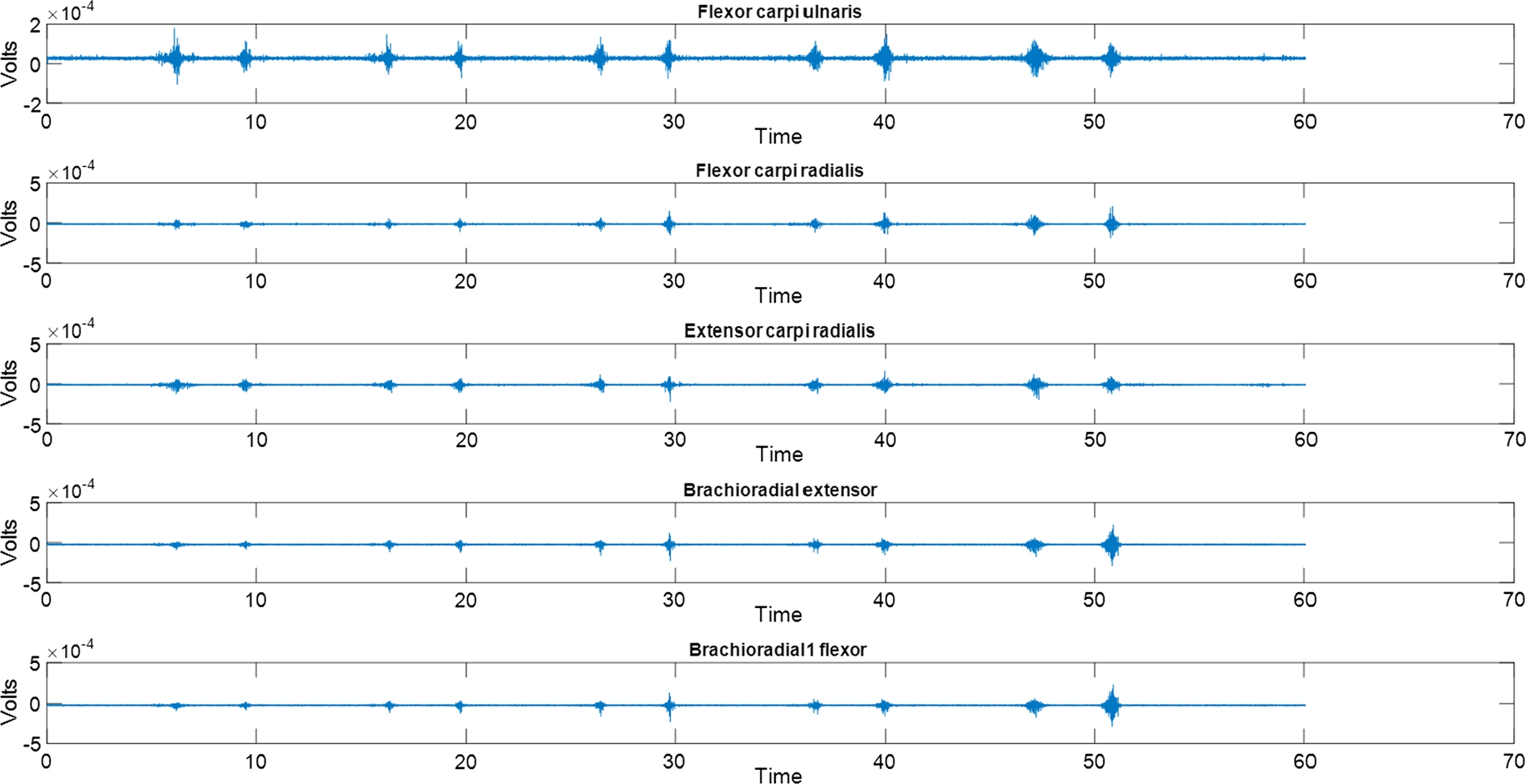
In Fig. 11.10, the raw data are shown for subject F1.
11.3.4.2 Feature Extraction
Instead of using raw signals, which is impractical due to the randomness of the sEMG signals, data are mapped into a lower dimension vector called a feature vector. Features are extracted from segmented data and used to feed the classification module. TD features are considered due to their computational simplicity, as demonstrated in the literature for myoelectric classification systems [3]. The TD features used are mean of the absolute value (MAV), root mean square (RMS), variance (V), zero crossing (ZC), waveform length (WL), Willison amplitude (WA), energy (E), and average power (AP), as described and detailed in [12,19,27]. Each feature is numbered with its corresponding muscle associated with a channel. Features were labeled as MAV1, MAV2,…, MAV5, RMS1, RMS2, and so on.
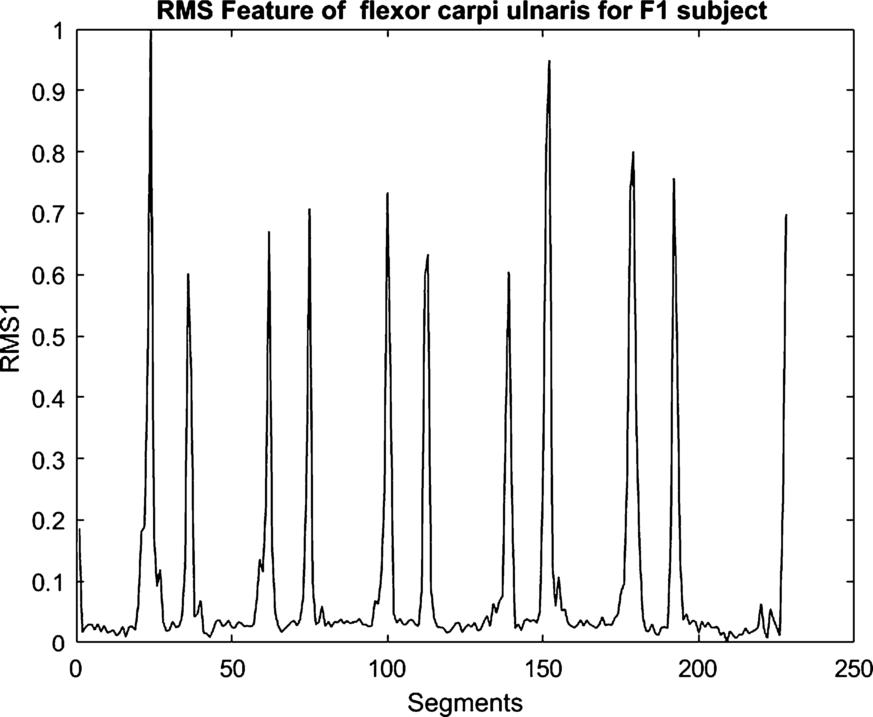
In Fig. 11.11, the RMS plot of normalized data for the flexor carpi ulnaris muscle is shown (subject F1). Notice the reduction of dimensionality obtained; the x-axis denotes time segments, where each segment represents a window of 255 ms.
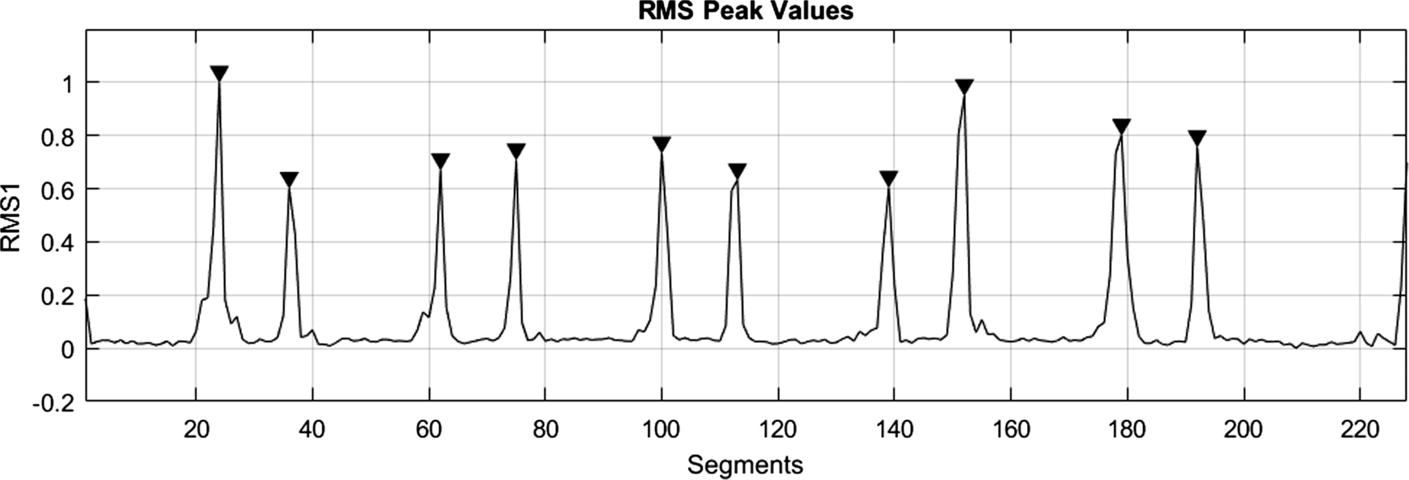
Marker values are obtained as peaks in the feature vector and used to label the data according to Table 11.2. In Fig. 11.12 those markers are illustrated as peaks where ![]() spheres were grasped.
spheres were grasped.
11.3.4.3 Classification
Four popular classifiers are considered: linear discriminant analysis (LDA) [1], decision trees (DTs) [6], support vector machine with Gaussian kernel (SVM-GK), and neural networks (NNs). Using raw sEMG signals and eight TD statistics, a feature vector was determined for muscles and linking all together to arrange a 40-dimensional feature vector, which feed the classifiers.
Decision Trees
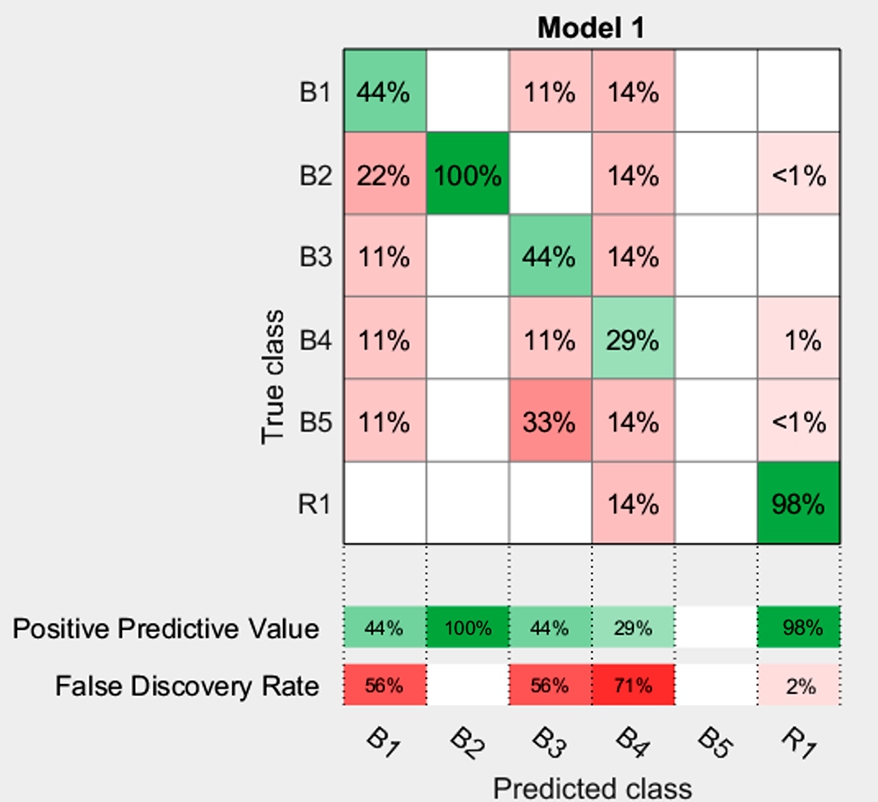
An accuracy up to 91% was reached with DT. However, the classifier was unable to predict sphere 5 (B5). Predicted values are low for most of the spheres, except for sphere 2. The false discovery rate is high. Fig. 11.13 displays the confusion matrix.
Linear Discriminant Analysis
Similar problems as with the DT occur with the LDA classifier; some spheres are not predicted at all and the false discovery rate is high, as can be seen in Fig. 11.14.
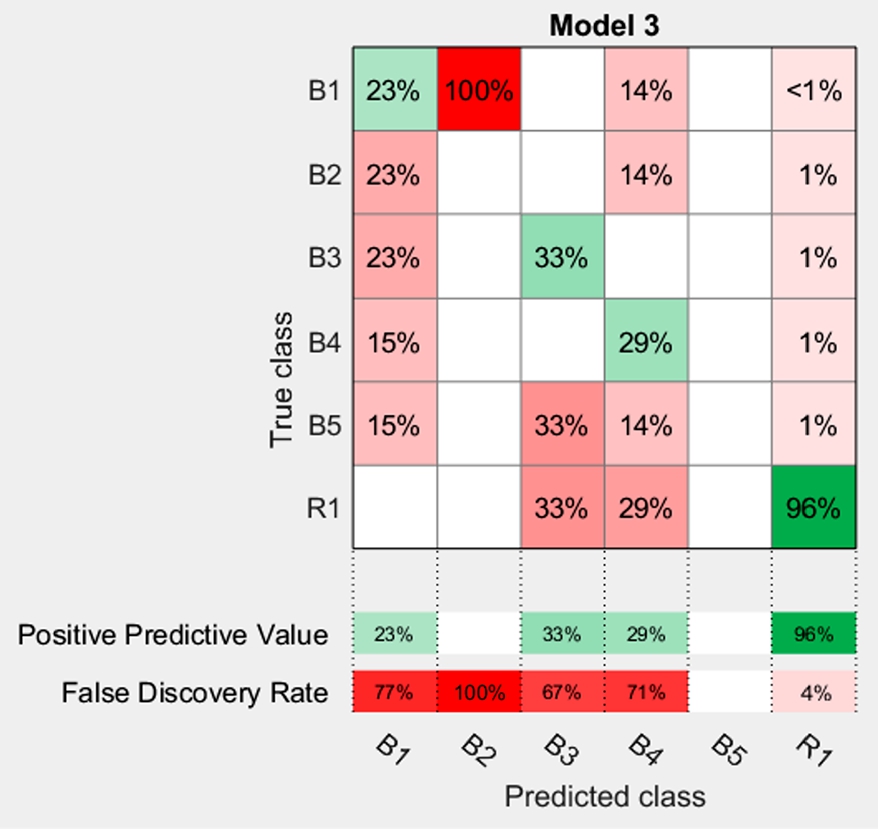
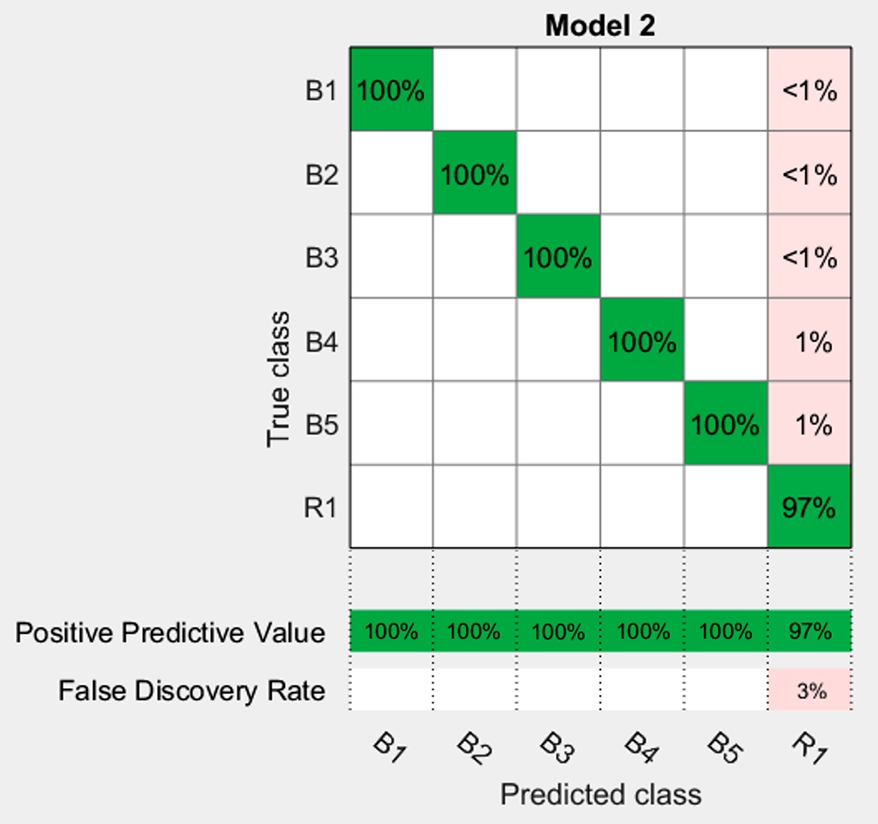
Support Vector Machine With Gaussian Kernel
This classifier's performance is the most convenient for this application, as can be seen in Fig. 11.15. The confusion matrix shows high predicted rates, reaching an accuracy of 97%.
11.3.5 Control of Biomechatronic System
11.3.5.1 Human Hand Biomechanics
The ROM that the human hand can naturally perform is limited by several constraints, which can be grouped into three categories: static, intrafinger, and interfinger [7]. In this example only intrafinger constraints are considered because they are related to movement of flexion/extension of the hand. The advances presented in this study are restricted to the thumb tracking motion.
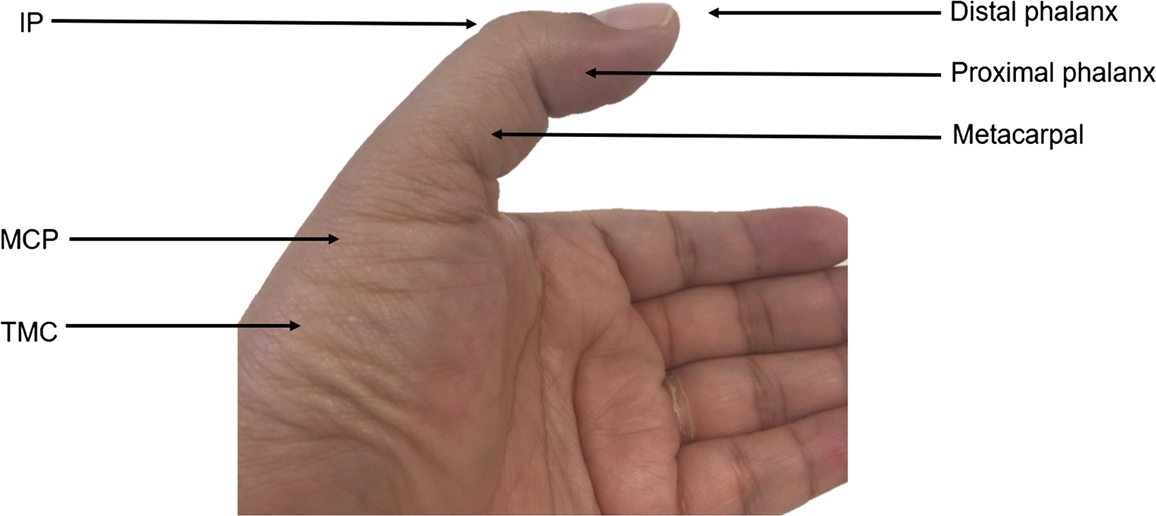
Thumb Biomechanics
The thumb is constituted by three bones: distal phalanx, proximal phalanx, and metacarpal, forming an open kinematic chain with three rotational joints: the interphalangeal (PIP), metacarpophalangeal (MP), and trapeziometacarpal (TMC) joints. This articulated system is shown in Fig. 11.16.
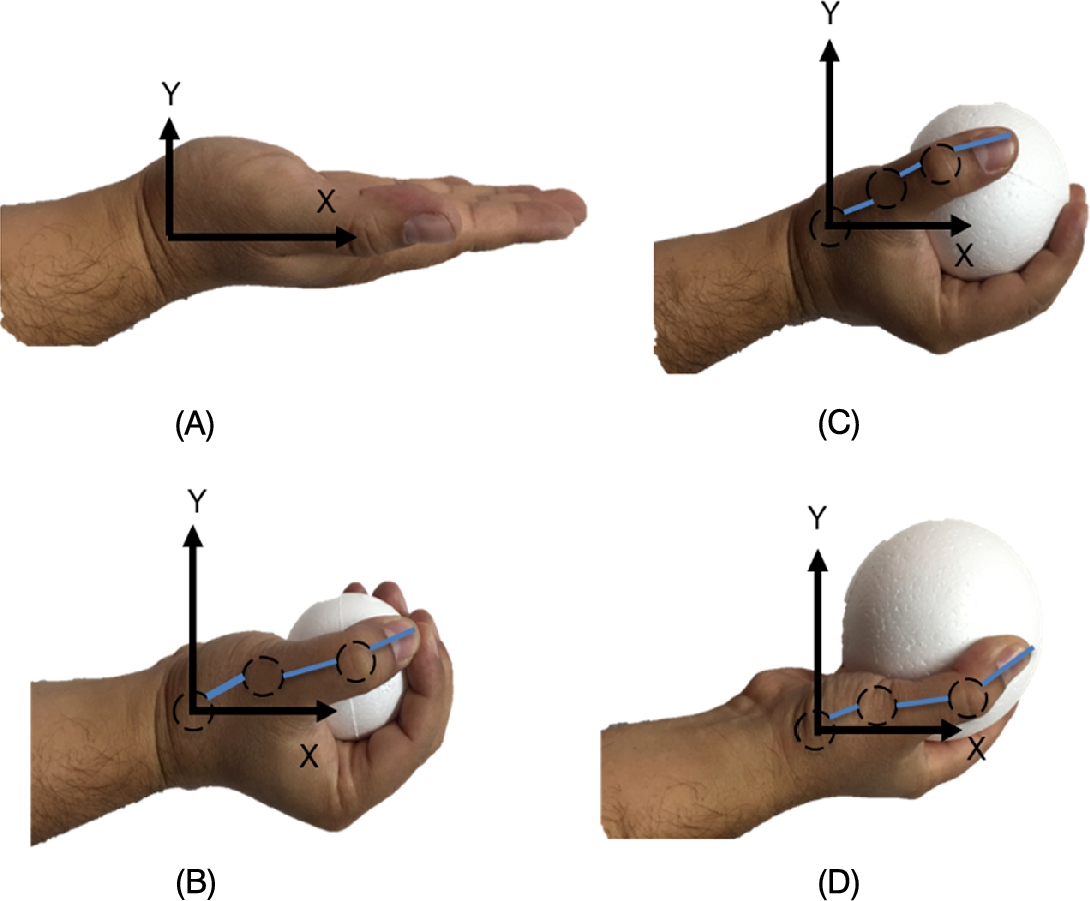
Without loss of generality, let us consider four positions to study the motion of the thumb (TP). Let us define the set
where OH and ![]() for
for ![]() are the open hand, grasp sphere 1, grasp sphere 2, and grasp sphere 3 tasks, which restrict the hand at determined positions, as can be seen in Fig. 11.17.
are the open hand, grasp sphere 1, grasp sphere 2, and grasp sphere 3 tasks, which restrict the hand at determined positions, as can be seen in Fig. 11.17.
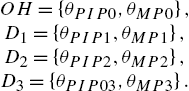
Starting from OH, it is possible to design a motion path for the thumb angle positions while the hand grasps spheres of different diameters. Finger positions are defined in terms of their joint angles θ as defined in Table 11.1. Two joint angles θ for the thumb were chosen, so we have
The positions defined in (11.18) introduce a dynamic in the kinematics of (11.19). A mapping that relates (11.18) and (11.19) is proposed as
The possible states of the thumb (TP*) are built with (11.20) and defined as
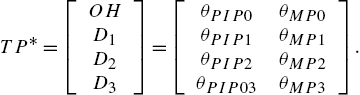
The rows of (11.21) can be used to design a trajectory path for the thumb considering the mechanical variables position, speed, and acceleration, as described in the problem formulation section for angular joints. In this case, a polynomial path that is able to track angular motion of TP* is designed and applied to track thumb motions via EMG signals.
11.3.5.2 Path Planning
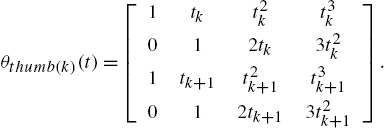
Angular positions trained by the classifier are used to synthesize a desired reference. There are two methodologies to generate paths in robotics: polynomial and nonpolynomial methods. The polynomial approach is selected for its simplicity [13]. Let us consider a state machine with two discrete states ![]() and
and ![]() , which are selected from (11.21). Then a parametric cubic polynomial path is defined as
, which are selected from (11.21). Then a parametric cubic polynomial path is defined as
Moreover, for any discrete point in (11.19), and considering (11.21), a polynomial function for two desired angular positions is represented as
11.3.5.3 Neural Controller
A multilayer feedforward neural network with time delay is trained to track the desired trajectories. The neural network can approximate a function whose parameters are the initial and final points of (11.21). The neural network is trained to learn trajectories defined by a reference model which is constituted by the polynomials described by (11.23) and parametrized with four constraints

where ![]() is defined for each joint of the thumb according to (11.21);
is defined for each joint of the thumb according to (11.21); ![]() ,
, ![]() are the initial and final time of trajectories. The output
are the initial and final time of trajectories. The output ![]() of the artificial neural network is applied to a model predictive control (MPC) architecture, with the purpose of minimizing a cost function J, defined as
of the artificial neural network is applied to a model predictive control (MPC) architecture, with the purpose of minimizing a cost function J, defined as
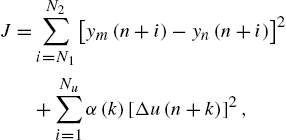
where ![]() ,
, ![]() , and
, and ![]() are the costing horizons over which the error of the output and inputs are evaluated;
are the costing horizons over which the error of the output and inputs are evaluated; ![]() is the output of the reference model, and α is the contribution that the sum of the squares of the control has over J. The MPC approach is well known in the literature; the foundations were established in [21,20], where artificial neural networks were implemented as the plant nonlinear model.
is the output of the reference model, and α is the contribution that the sum of the squares of the control has over J. The MPC approach is well known in the literature; the foundations were established in [21,20], where artificial neural networks were implemented as the plant nonlinear model.
The control scheme proposed is depicted in Fig. 11.18. A mismatch error function is added to guarantee that only the required positions are passed to the path planning module.
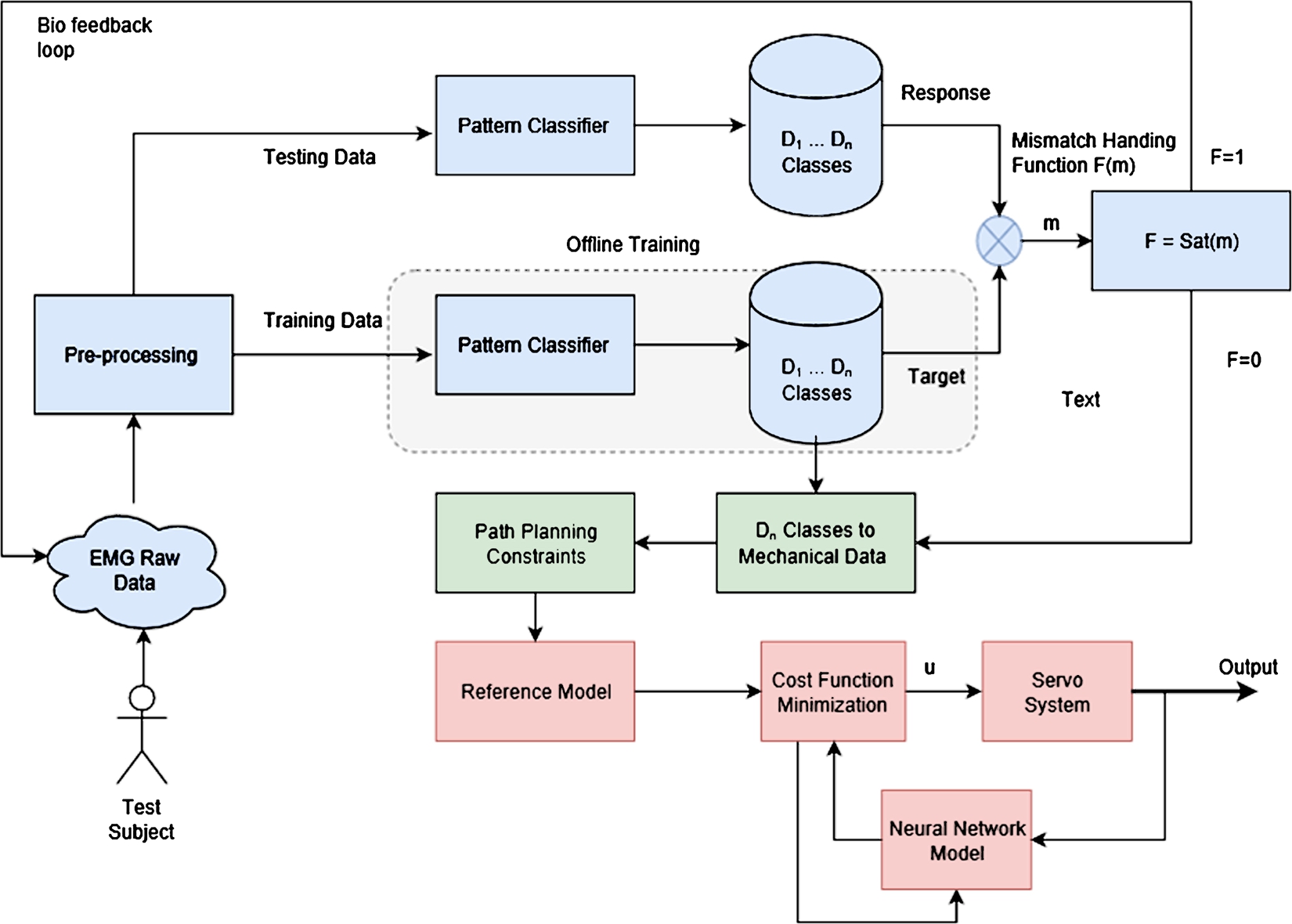
The mismatch function is expressed as
where T is vector generated by the classifier with correct prediction and R is the response vector generated with testing data. If ![]() , a biofeedback loop [3] is activated to indicate to the subject that a mismatch is found and it must repeat steps 1 to 7, as described by the experimental set-up.
, a biofeedback loop [3] is activated to indicate to the subject that a mismatch is found and it must repeat steps 1 to 7, as described by the experimental set-up.
11.3.5.4 Hardware Implementation
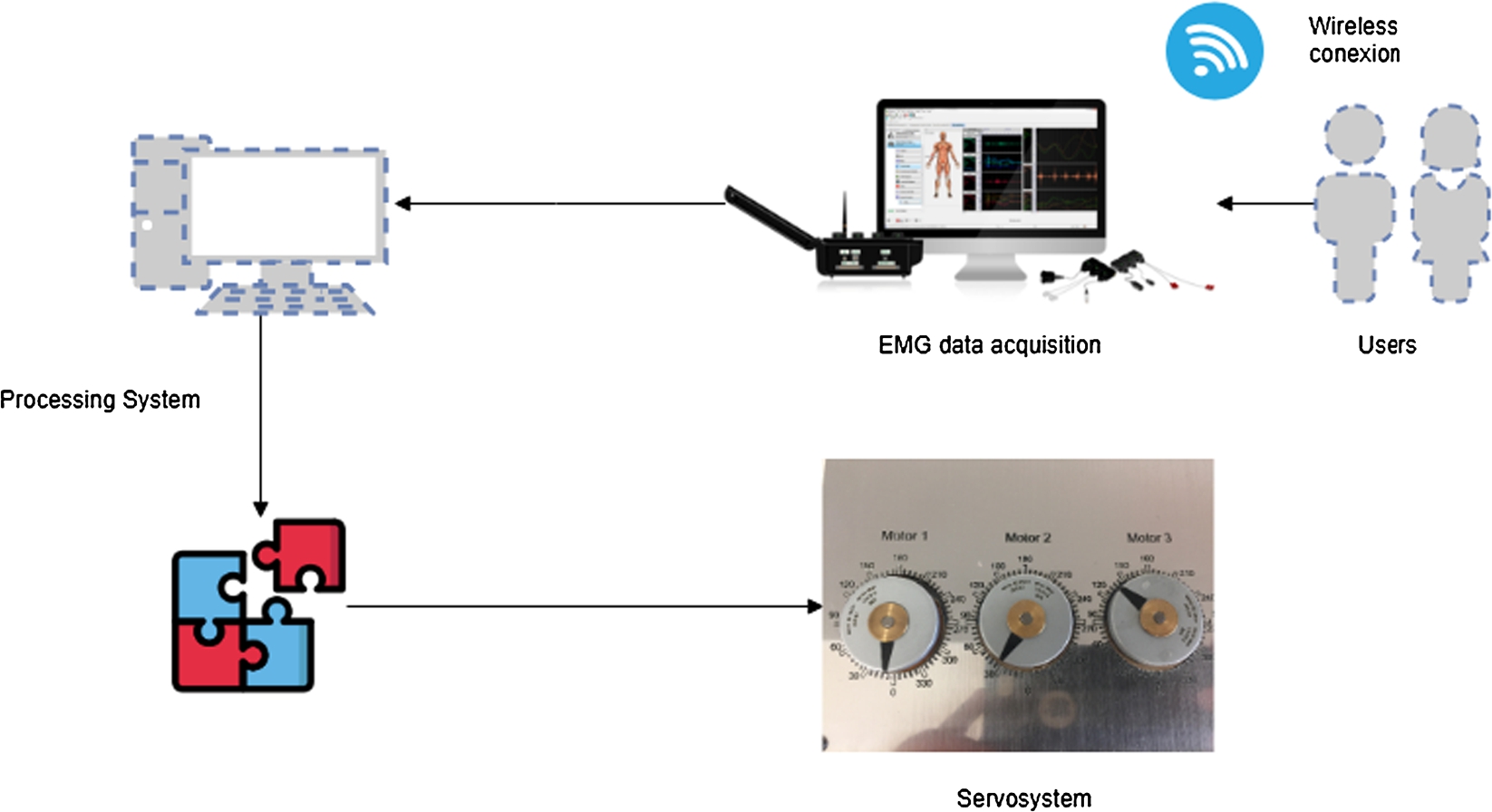
The hardware set-up is shown in Fig. 11.19. It consists of a Trigno Wireless System, as described in the Experimental preparation section. Data are processed by Matlab, where the classifier, previously trained, is selected and the control algorithm is implemented. The output of the processing system is connected with a servo system, which integrates BLDC motors with a driver system with a microcontroller-based interface to receive control commands from Matlab.
11.3.5.5 Results
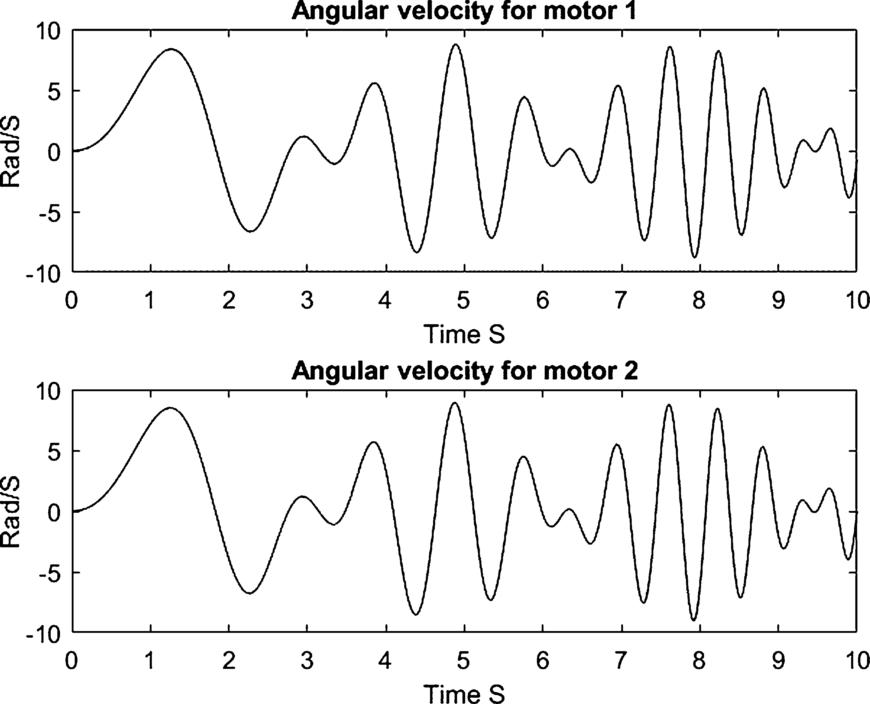
The SVM classifier is selected due to it demonstrated better performance. The BLDC motor is identified offline with a neural architecture constituted by 10 neurons in the hiding layer, two delayed plant inputs, and two delayed plant outputs with a sampling interval of 0.8 sec. Training data are constituted by 800 samples. Fig. 11.20 shows the input/output pairs. The MPC is configured with ![]() ,
, ![]() , and
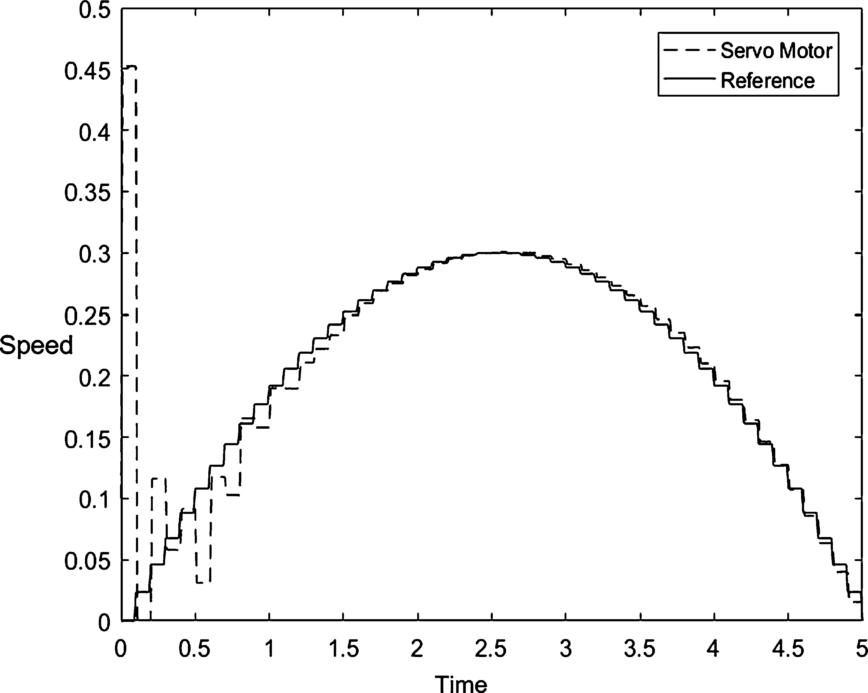
, and ![]() ; the minimization routine was based on the backtracking algorithm. Fig. 11.21 shows the velocity tracking profile applied to the MP joint (metacarpal link) of the thumb for subject F1 while performing a OH to
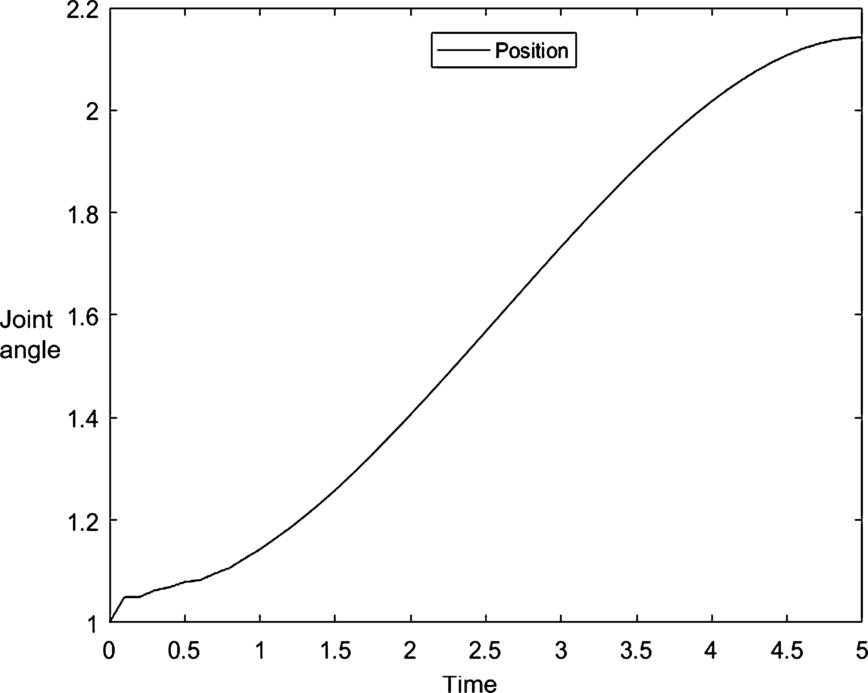
; the minimization routine was based on the backtracking algorithm. Fig. 11.21 shows the velocity tracking profile applied to the MP joint (metacarpal link) of the thumb for subject F1 while performing a OH to ![]() task. The speed profile corresponds to a difference of one degree, which is shown in Fig. 11.21, i.e., the metacarpal bone motion considered corresponds to a motion angle variation from 1 to 2.1 degrees. As can be seen in Fig. 11.22, the servo is able to track the position with good performance.
task. The speed profile corresponds to a difference of one degree, which is shown in Fig. 11.21, i.e., the metacarpal bone motion considered corresponds to a motion angle variation from 1 to 2.1 degrees. As can be seen in Fig. 11.22, the servo is able to track the position with good performance.
11.4 Conclusion
The methodology proposed in this work can be applied to control electromechanical systems using superficial EMG signals. Moreover, the methodology proposed implements a new approach to study the motion of the fingers, which exhibits very small variations, which can be established by means of grasping spheres with diameters of predefined sizes. To the best of our knowledge, there is currently no methodology available that studies finger motions employing sEMG and considers small changes in the same movement.