In 1939, General Motors Corporation, then a young company with an appetite for bold innovation and creative marketing, introduced the world’s first driverless concept car at the World’s Fair in Queens, New York. The general public was thrilled. Yet, it would take more than sixty years for GM’s vision to become Google’s highly functional driverless prototype.
Driverless-car development languished for decades because of a phenomenon we call the Da Vinci problem, which haunts inventors to this day. The Da Vinci problem arises when an inventor dreams up a technology that doesn’t work, not because of a problem with its concept, but because the other technologies that support the invention have not yet come into existence. While an inventor’s vision may be right on track, the invention will fail until the eventual maturation of key supporting technologies.
Here’s a classic example. In 1493, Leonardo Da Vinci invented the helicopter but alas, Leonardo’s vertical flying machine (which he called an airscrew) could not fly. Its shortcoming wasn’t its fundamental concept. Nor did the problem lie in Leonardo’s designs.
The fatal flaw was that in order to fly, Leonardo’s airscrew needed a lightweight but strong aluminum body and a powerful power source, neither of which were yet available. The modern helicopter would not lift off the ground until the twentieth century. Several hundred years after it was initially conceived, Leonardo’s design for a vertical flying machine finally took flight when it could be constructed out of lightweight aluminum and powered by a modern internal combustion engine.
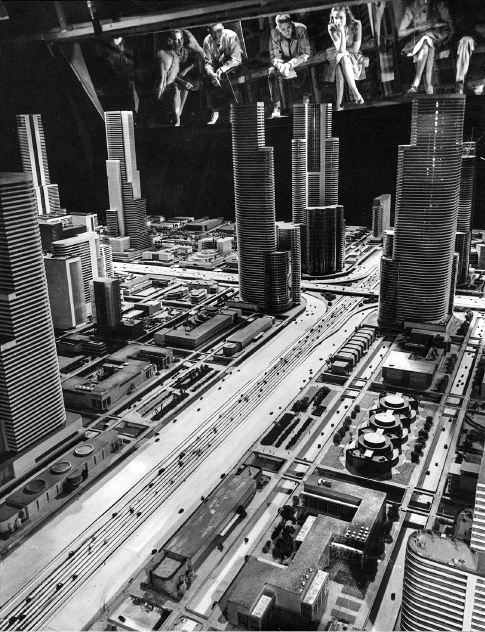
The development of driverless cars has followed a similar trajectory. The first driverless cars were a fantasy created by GM’s marketing department for the 1939 World’s Fair. The fair was a thrilling, massive 1,200-acre tribute to cutting-edge technologies such as television, electric street lamps, fluorescent lighting, and a new must-have device for emerging middle-class families, the automatic washing machine. GM’s bold exhibit, the “Futurama,” showcased an Automated Highway that by the year 1960 would make “hands-free, feet-free” driving the norm.
GM’s Futurama exhibit consisted of a small-scale model of a typical American landscape of the near future. Fairgoers absorbed the scene from the vantage point of moving chairs that carried them through this mesmerizing miniature world.1 Fairgoers sat and glided past tiny cities, farms, stretches of countryside, even an airport in miniature, all seamlessly connected by ribbons of smooth, high-speed automated highways. Over the course of the eighteen-minute ride, visitors were treated to a recorded narrative that described the delights of this Lilliputian landscape.
Figure 6.1 As fairgoers listened, the Futurama’s narrative read, “The world we are now seeing is a vision, an artistic conception, which may undergo many changes as it develops into the great realities of tomorrow.” New York World’s Fair, “Futurama: Highways & Horizons,” 1939.
Source: General Motors
During the ride, the Futurama’s narrator explained that by the year 1960, regular people would enjoy trouble-free personal mobility on automated highways in cars guided by a system of radio controls (the exact technological details of how, exactly, these radio-controlled cars would work were left purposefully vague). According to the narrative, just twenty-one short years into the future, human drivers would become relaxed passengers, thanks to GM’s marvelously engineered automobiles. Radio-controlled cars would steer themselves on and off automated highways, comfortably, safely, and economically, ferrying people from their home to their office to the airport, or wherever else their heart desired.
Today, it’s difficult to imagine that a model landscape whose chief selling point was high-speed roads and tiny cities would fascinate millions of people. In 1939, however, the American public was fascinated by GM’s utopian depiction of automated highways. GM’s Futurama, one of the most successful exhibits of the fair, attracted an estimated total of ten million riders. On some days, 28,000 people waited for hours in lines that sometimes stretched two miles long.2
GM’s artificial miniature world was great theater, as seductive and magical as the Technicolor Land of Oz in the film The Wizard of Oz (which was released earlier the same year). Unlike the other emerging technological marvels showcased at the World’s Fair that eventually became commercial products, however, the Futurama’s automated highway—while brilliant showmanship—proved to be as authentic as the flying monkeys in the TheWizard of Oz. GM glossed over the technical details of how, exactly, these “hands-free” cars would work, attributing their ability to guide themselves to some clever blend of radio and electronics.
Perhaps it’s not surprising that GM’s Futurama was conceived not by engineers, but by legendary industrial designer Norman Bel Geddes. Bel Geddes was famous for creating fantastic movie sets and futuristic reinterpretations of everyday household objects such as cocktail shakers, desk lamps, and radios. After the fair, Bel Geddes wrote a book, Magic Motorways, about the liberating possibilities of well-designed high-speed motorways.3 He attributed the popularity of the 1939 Futurama to the fact that people craved the privacy and personal mobility offered by the automobile, yet abhorred its high cost:
All of these thousands of people who stood in line ride in motor cars and therefore are harassed by the daily task of getting from one place to another, by the nuisances of intersectional jams, narrow, congested bottlenecks, dangerous night driving, annoying policemen’s whistles, honking horns, blinking traffic lights, confusing highway signs and irritating traffic regulations they are appalled by the daily toll of highway accidents and deaths; and they are eager to find a sensible way out of this planless, suicidal mess.4
Many modern observers might find this negative description of early roadways surprising, given that, at the time, cars were still costly luxury items owned by a relatively small number of well-to-do people. Yet, it seems that even in 1939, trouble loomed in paradise. Years before the interstate highway system was built and before the green-yellow clouds of smog descended into cities like Los Angeles and Beijing, cars were already proving to be an unsafe and costly mode of personal transportation, a “planless, suicidal mess.”
Bel Geddes viewed well-designed highways as the foundation for economic prosperity, a better military, and improved public health. Aside from the practical benefits, Bel Geddes believed that an efficient highway system played a vital role in shaping a nation’s political climate. As World War II loomed and fascist dictators rose to power in several European nations, for Bel Geddes, convenient personal mobility was the very foundation of democracy.
Bel Geddes concluded Magic Motorways with a passionate call to action about the importance of well-designed highways, saying that good roads were the foundation of a free, yet unified, society:
An America in which people are free … to move out on good roads to decent abodes of life—free to travel over routes whose very sight and feel give a lift to the heart—that is an America whose inner changes may far transcend the alterations on the surface. If city dweller can know the land, Easterner know Westerner, the man who has lived among mountain know harbors and the sea, then horizons will be broadened, individual lives will grow … out of that very interchange of diversity will come another thing … we call it unity. It is not a unity imposed from above, such as exists under a dictatorship, but a unity based on freedom and understanding.5
Just a year after Bel Geddes wrote these stirring words, the United States officially entered World War II. GM shifted its attention away from building automated highways and toward manufacturing tanks, aircraft, and armaments for the Allied war effort. The development of automated highways ceased for most of the 1940s, yet World War II would prove to be a technological goldmine in the decades to come.
The war was a battle of technology. As it waged on, massive government investment in research accelerated the development of several important military technologies that today guide the modern driverless car, including computers, lasers, and radar. After World War II ended, these wartime technologies would play a key role in the development of electronic highways in the 1950s and 1960s, and eventually help steer the first fully autonomous robotic vehicles in the 1980s.
The Golden Age
The 1950s and 1960s were a Golden Age, both for the automobile and for the development of the automated highway. In the boom of economic prosperity that followed World War II, thousands of people bought their first car. According to U.S. census data, by the end of the 1950s, most U.S. households owned at least one automobile.
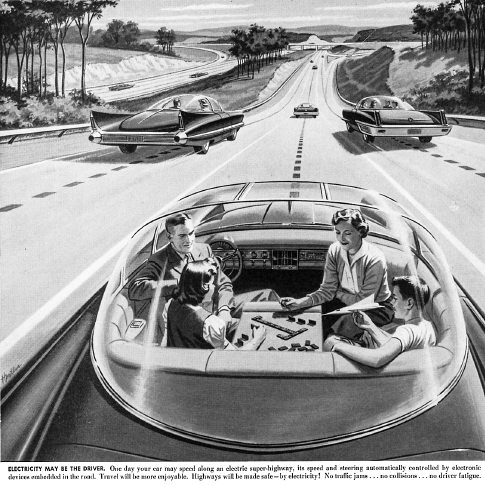
Figure 6.2 “Electricity may be the driver.” Driverless Car of the Future, advertisement for “America’s Electric Light and Power Companies,” Saturday Evening Post, 1950s.
Source: The Everett Collection
To encourage the development of automotive transportation, in 1956 the federal government passed the Federal Highway Act, kicking off several decades of frenzied highway building that would ultimately rearrange the face of American cities, suburbs, and countryside. As the number of new car owners skyrocketed, millions of drivers eagerly put the nation’s sprouting network of new roads and highways to use. With tens of thousands of miles of paved roads and a national interstate highway system that sprawled from coast to coast, a U.S. “car culture” was born.
People embraced the low-cost and convenient personal mobility their cars provided them, bringing Bel Geddes’s poetic (and prophetic) description of the unifying power of well-designed highways to life. Efficient motorways and cars indeed enabled city dwellers to explore the countryside, and allowed people who lived in the mountains to experience the wonders of harbors and the sea, first-hand. Less poetically, a nation on wheels bought meals at new fast-food restaurants like the In-N-Out drive-through burger stand, where customers enjoyed the convenience of eating hamburgers inside their cars. Cars became a new sort of living room. By the end of the 1950s, 4,000 drive-in movie theaters represented a whopping 25 percent of the nation’s movie screens.6
As people learned the pleasures of eating and relaxing inside their vehicles, the automobile industry created big, powerful, cars whose bodies were beautifully shaped and curved, and whose interiors offered the spaciousness of a living room sofa. Today’s cars might be technologically superior, but for many people, they lack the soul of automobiles designed in mid-century. Cars of the 1950s and 1960s embody an optimism, their lush, curvy, aerodynamic bodies inspired by the shape of jet planes and cartoon drawings of rocket ships.
We recently accidentally stumbled upon a collection of old cars during a routine journey to visit relatives. Lured by signs announcing a vintage car show, we parked our modest little black leased Honda—a practical, fuel-efficient but generic little car—and walked over to a parking lot to ogle rows of automobiles from the 1950s and 1960s, all lovingly restored to their former glory. Antique Buicks, Chevrolets, and Cadillacs sat majestically in rows, chrome-laden relics from an era before oil embargos, massive product safety recalls, and competition from overseas automakers. Clusters of mostly older men peered underneath open hoods at gigantic old-fashioned metal carburetors and shiny coils of steel pipe. Like the plumage of exotic birds, the gleaming bodies of these proud painted ladies glowed bright red, tangerine, and aqua blue against the drab gray of the parking lot.
While many Americans during the 1950s embraced the new-found convenience and privacy of traveling around by automobile, they did not necessarily embrace the task of driving. The notion of an automated highway remained popular in the public imagination. In 1957, a coalition of power companies featured a driverless car in an advertising campaign celebrating the nation’s rapidly rising rates of electricity consumption, something that in those days was considered a robust sign of economic and social progress. The advertisement depicted an electric car in which members of a family were seated in the back, facing each other around a table playing dominos. The caption under the picture reads:
One day your car may speed along an electric super-highway, its speed and steering automatically controlled by electronic devices embedded in the road. Highways will be made safe—by electricity! No traffic jams ... no collisions ... no driver fatigue.7
In 1958, Disney ran an episode on its popular television show Disneyland entitled “Magic Highway, U.S.A.” In the episode’s final few minutes, an animated clip shows the family car being automatically washed and electrically charged up in the garage. The family climbs in, dad pulls a few sliding levers to program the car’s destination, and the car takes the wheel and drives itself. Dad conducts a business meeting during the drive while his wife and child relax in the back.
Not to be outdone, nearly two decades after its hugely successful Futurama exhibit mesmerized people at the World’s Fair, GM continued its efforts to create an automated highway. The notion that the highway, not the car, would guide the vehicle makes sense when you consider the state of information technologies in those early years. A computer was the size of a small room, much too large and heavy to fit inside any car. Vacuum tubes (the precursor to silicon transistors) were too fragile to endure the bumps and sudden turns of the road. Artificial-intelligence software was in its infancy. Cutting-edge research of the day consisted of teaching an IBM 701 mainframe to play games of checkers or blackjack.8
The hardware devices of the day were also primitive or non-existent. Cameras were large, analog, and fragile. Lasers and radar were bulky machines, still confined to military application. GPS had yet to be invented.
To make things even more challenging, most of the world’s information and data were still in analog form. At that time, text and numerical data was created manually or laboriously captured via measurement or observation. The data was recorded in tables on paper or, in a few advanced cases, kept in crude database tables stored inside a mainframe computer. In an era that lacked abundant data, detailed digital maps, fast computers, and accurate, mobile sensors, inserting even primitive “intelligence” into a two-ton steel machine was a formidable challenge. Since computing technology was too immature to oversee the task of driving, GM engineers came up with another solution: color television technology.
GM’s Electronic Highway
GM teamed up with the Radio Corporation of America (RCA), at that time a hotbed of electronics innovation. RCA employed the famous inventor Vladimir Zworykin, a pioneer of cathode-ray tubes and automated solutions, to head up the company’s research into automated traffic lights and other intelligent highway technologies. Zworykin, already concerned about the negative effects of rapidly increasing traffic density and higher-speed automobiles on the safety of the nation’s highways, was convinced that new methods were needed to relieve the driver of some of the mechanical tasks of driving.9
Working with GM’s automotive engineers, Zworykin’s team of electronics experts broke the challenge of designing an automated highway into three problem areas. As he described it, “Any vehicle control system [must] know the position of every car on the highway. This implies some means of vehicle detection. The second requirement is to make known the presence of every vehicle to the other vehicles most immediately concerned. Usually the vehicle following behind. This implies a means of communication between vehicles or between highway and vehicle. The third step is the application of automated controls to a vehicle in response to the information received.”10
After several years of research, RCA and GM engineers kludged together an ingenious—although by today’s standards, crude—solution they named the electronic highway. They used a combination of radio technologies, electronic circuits, and logic gates combined with ages-old theories of electromagnetism. A high-profile demonstration of the electronic highway took place in 1958 on a specially equipped 400-foot-long section of highway outside Lincoln, Nebraska. GM and RCA enlisted the enthusiastic support of the state of Nebraska’s Department of Roads to weave together a primitive detection and guidance system that remotely controlled the cars’ movements along two critical axes: laterally, to steer correctly within the confines of its lane, and longitudinally, to keep the cars’ bumpers a safe distance apart. The test vehicles were two majestic 1958 Chevrolets with splendid tail fins and double front headlamps.11
Two years later, using a similar approach, GM and RCA created yet another electronic highway test track in New Jersey upon which specially outfitted GM cars were successfully started, accelerated, steered, and stopped, all without direct human oversight.12 A press release, written by the city of Princeton, New Jersey, in 1960, described the technologies that enabled this electronic highway masterpiece.
Figure 6.3 The electronic highway in action.
Source: Radio Corporation of America (RCA), courtesy the David Sarnoff Library
[The] detection system thus keeps cars automatically at a safe distance behind those ahead, and causes cars to stop when there is an obstruction or a parked vehicle in the lane ahead. The guidance system consists of a single, continuous cable buried in the pavement in the center of the traffic lane. A signal current in this cable is picked up by two coils mounted at the front end of the car and equi-distant from the guidance cable. If the car moves in either direction away from the center of the lane, the signal becomes stronger in one coil than in the other, generating a “difference signal” that can be used either to warn the driver by lights or by an audible signal, or to operate the steering gear automatically.13
The detection system that prevented the cars from rear-ending one another was essentially a communications infrastructure made up of wired-together transistors, radio transmitters, and lights. To create the detection system, RCA engineers first placed a series of rectangular loops of wire, each slightly less than the length of the car, one after the other along the length of the special test roadway. Each time a car drove over a loop of wire, it set off a signal in a special transistorized detection device buried under the roadway.
As the car passed quickly over this series of rectangular loops, the resulting signals were fed into a network connecting all of the detector units. This moving succession of signals lit up a chain of lamps placed along the edge of the road to form an electronic “flying tail” that served as a warning system to other nearby automobiles. Human drivers, at least in theory, could see a driverless car’s position thanks to the illumination of the roadside lamps. Or, if no humans were present, the signals could be sensed by a following car so it could automatically correct its position by either hitting its brakes or pressing the gas pedal.
The lateral guidance system that steered the car inside its lane involved slightly more convoluted and imaginative engineering. To mimic the eyes and reflexes of an attentive human behind the steering wheel, GM and RCA engineers harnessed the power of a combination of electronic gadgets and electromagnetic forces. To feed critical information about the car’s lateral position inside its lane, GM and RCA engineers used modern electronics technologies and an ancient relationship that exists between electrical current and magnetic force fields.
For more than a century, scientists have known that an electrical current has the ability to generate a magnetic field. A changing magnetic field, in turn, can induce current in any conductive material that’s standing or moving nearby. The closer that conductive material is to the source of the magnetic field, the greater the current induced.
Scientists and engineers have become quite adept at measuring and using the relationship between the two primal forces of magnetism and electricity. To quantify the shape and magnitude of a magnetic field generated by flowing electrical current through a wire, scientists and engineers use what’s known as Ampere’s Law. In turn, to quantify how much electrical current will be induced by a magnetic field generated by that conductive wire, experts apply Faraday’s Law—named after eighteenth-century British physicist Michael Faraday.
Not surprisingly, both Ampere’s Law and Faraday’s Law prove what most people could already intuitively predict. The greater the amount of electrical current running through a conductive wire or cable, the more powerful the magnetic field that will result. Similarly, the stronger the magnetic field that moves around a conductive wire, the stronger the electrical current that will be induced in nearby conductive materials.
One of the better-known modern practical applications that makes use of the marriage between electrical current and magnetic force fields is the invisible dog fence. Like the beloved but peripatetic family dog, a driverless car is happiest when untethered, yet still safely confined inside a specific geographic area. Similarly, a driverless car on GMs and RCA’s electronic highway reached optimal performance when driving freely while still safely confined to its lane.
To contain their dog, suburban homeowners pay to have a live electric cable buried along the perimeter of their property line. The buried cable carries an oscillating electrical current that radiates a magnetic force field. This oscillating magnetic force field is picked up by a special dog collar into which is embedded a conductive metal sensor. When this special collar is affixed to the neck of the family dog, the next time the dog roams too close to the property line (and buried cable), the sensor in the dog’s collar will be activated and administer an electric shock, which eventually teaches the dog to stay within the confines of its own property.
The steering system for early self-guided cars used similar principles. Instead of a live electrical cable buried along a homeowner’s property line, RCA and GM buried a live cable underneath the center of each lane of roadway of their electronic highway test facilities. Next, similar to the sensor in the dog collar, engineers equipped each car with two metal “pick-up coils,” one on each side of the car an equal distance apart. Attached to each pick-up coil was a measurement device that could quantify the strength of any electrical current that passed through it.
Imagine the scenario. A car equipped with two pick-up coils and measurement devices slowly rolled down a road. As the moving car passed overhead, its on-board pick up coils received the electrical current induced by the magnetic field enveloping the buried cable. If the car was correctly driving down the middle of the lane, the amount of induced current in each of the two coils would be roughly equal. However, if the car veered off to the side of its lane, one coil would become much more strongly charged and its sensor would record a much higher measurement than the other. The sensor with the stronger signal would send instructions to the car’s specially rigged steering wheel to turn the car slightly until the sensor measurements were once again equal.
This process was known as “feedback control,” and at the time, was considered advanced technology. Using a steady stream of measurement data from both sensors attached to the car’s pick-up coils, this combination of technologies provided a crude but effective automated steering system. Long before the invention of computer vision, GM’s and RCA’s rigged steering wheel could adjust its lateral position inside a lane of roadway with the accuracy and responsiveness of an alert human driver.
At the time, optimism for GM’s and RCA’s crude prototype ran high; the Princeton press release enthused that someday, this electronic highway invention would enable “motorists of the future [to] be able to get in a hand of bridge or take a nap on that weekend drive to the cabin.”14 Despite positive public response, GM’s electronic highway never went anywhere commercially. The long research partnership between GM and RCA, however, would prove productive in the decades to come.
The core idea of the detection system used in the electronic highway is still widely used today by modern responsive traffic lights. Automated traffic lights manage traffic flow by changing to green when they detect the presence of cars in the intersection or awaiting their chance to turn left. To detect nearby cars, automated traffic lights use a system of buried-wire inductive loops and sensors that, when triggered, send electronic signals that cause the stoplight to change color.
Perhaps encouraged by its earlier successes, GM took one more shot at a driverless car at the 1964 New York World’s Fair in Queens, New York, the very same site where the glamorous 1939 Futurama took place a quarter century earlier. As described by its advertising, GM’s concept car, the Firebird, “anticipates the day when the family will drive to the super-highway, turn over the car’s controls to an automatic, programmed guidance system and travel in comfort and absolute safety at more than twice the speed possible on today’s expressways.”15 The Firebird, despite the appeal of its sleek lines and single, vertical rear fin, would be GM’s final high-profile foray into driverless cars for decades.
Figure 6.4 The “Turbine-Powered” GM Firebird concept car entering an autopilot lane. This techno-utopian fantasy was set in 1976 but created in 1956 for GM’s Motorama Exhibit.
Source: General Motors
Throughout the 1960s and 1970s, other researchers continued to refine variants of automated highways using GM’s and RCA’s basic system of electrical cables, metal coils, and magnetic sensors. In the United Kingdom, the Transport and Road Research Laboratory tested a driverless Citroen DS that was guided by cables embedded in the surface of a test track.16 In the United States during the 1960s, Ohio State emerged as a leading research hub for a field of automotive engineering that, by then, was known as automated vehicle guidance and control.
By the dawn of the 1970s, the focus of most academic autonomous vehicle research shifted away from cars. Researchers turned their attention toward another sort of autonomous vehicle, mass transit automated people movers (APMs), that are used today to shuttle passengers at major airports like Heathrow and JFK.17 The era of the electronic highway was over.
The slow death of the automated highway
One of the primary reasons the dream of the automated highway eventually lost its allure was simple: cost. Rigging up the requisite electronic cables and roadside controls was an expensive and slow process, one that might have been a reasonable expense in a short stretch of test roadway, but was not workable on the massive highway systems that crisscrossed the United States and Europe. Even with the more generous highway construction budgets of the 1960s, equipping and maintaining the tens of thousands of miles of interstate highways with a fragile infrastructure of buried live electronic cables, transistors, and other devices was simply too cost-prohibitive.
In a 1969 paper, Ohio State researchers Robert Fenton and Carl Olson wrote that “the total investment in computers and highway-based sensors would probably average anywhere from $20,000 to $200,000 per lane mile.”18 Not only were automated highways too expensive, the available electronic and computing technologies of the day were too primitive. In the same research paper, Fenton and Olson, both tenacious and well-respected automated highway visionaries, glumly concluded that despite years of intensive research and development, “it is not possible at present to specify completely all of the required system components, because the necessary knowledge is not available.”19
Cost and technological readiness aside, another reason the Golden Age of automated highway research slowed to a near-halt was that the larger world of automobile manufacturing lost its youthful innocence. The auto industry, once a magnet for the boldest designers and most expert technologists, was forced to grow up and face the consequences of a world where cars were no longer a novelty. Cars and highways had become a practical tool of everyday life.
Consumer advocate Ralph Nadar’s instant 1965 classic book Unsafe at Any Speed exposed the shoddy engineering practices at the big auto companies, meticulously detailing the safety problems of the Chevy Corvair and the auto industry’s overemphasis on styling and profit margins over driver safety. The book was a best seller, and it motivated the passage of the National Traffic and Motor Vehicle Safety Act of 1966 and the passage of seat-belt laws in 49 states (the sole holdout being New Hampshire). The book generated more controversy a few years later, when the U.S. Department of Transportation conducted a series of tests of comparable small cars and concluded that despite Nadar’s claims, the safety of the 1960–63 Corvair compared favorably to “contemporary vehicles both foreign and domestic.”20
Despite the exoneration of the Corvair, it was too late to ease public pressure on GM, Ford, and Chrysler. The consumer-safety movement gained steam as the number of cars on the highway continued to increase. Already both a treasure and a curse, the United States interstate highway system matured into a sprawling transportation infrastructure that faced a new challenge: heavy traffic. Rush-hour traffic jams became part of everyday life as the number of people commuting daily from suburb to city center (and back) more than doubled between 1950 and 1970.21
In 1973 the era of cheap gasoline came to a sudden end as several oil-producing nations protested U.S. aid to Israel by raising the posted price of a barrel of oil by 70 percent.22 The United States auto industry would never be the same. Big car companies gave up their once-bold visions of hands-free, feet-free automated highways and instead focused on practical challenges such as defining safety standards for cars, improving fuel efficiency, and reducing exhaust emissions.
As the 1970s turned into the 1980s, driverless cars remained just a concept, not a reality. As the focus of the automotive industry changed, sleek designs took second place to fuel efficiency, and profit margins triumphed over aesthetics. Despite the efforts of many gifted engineers, for the remainder of the twentieth century, driverless cars continued to suffer from the Da Vinci problem, their development thwarted by the immaturity of the era’s information and communication technologies.
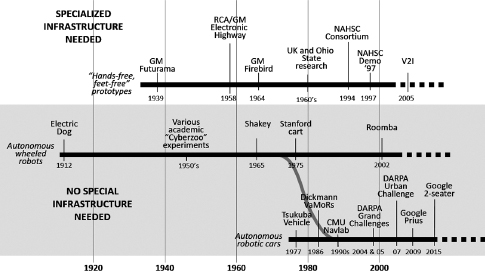
Figure 6.5 The History of Driverless Cars: Key milestones in the evolution of autonomous vehicles.