Reengineering a Spacecraft, and a Program
After Barry Goldstein left the Mars Exploration Rover project to take on the effort to refly the Polar Lander mission under the name Mars Phoenix, he and his engineering team first had to address the inadequacies the post-failure reviews had found in the Mars Surveyor 1998 project. There would be a formal review of those responses; in addition, he and the spacecraft manager he hired, Gary Parks, son of Robert J. Parks, who had run the Lab’s Flight Projects Office for two decades, intended to apply the majority of their project resources to testing. They could afford to because the hardware was apparently complete and paid for by the Surveyor 2001 project. What they found in their own three-year run to the launch pad was an object lesson in what really had gone wrong toward the end of the faster-better-cheaper era. They would have to reengineer key systems to ensure mission success.
If the Phoenix project succeeded in reengineering its lander, salvaging Mars polar science in the process, the same could not be said of the Mars program. With the missions built into the 2000 “road map” nearly complete, Mars program officials began planning their next decade in 2008. Despite spectacular successes, though, political winds in Washington had shifted decisively against them. By 2012, their program was in turmoil, with no approved missions after Phoenix’s successor in the Scout program, the Mars Atmosphere and Volatile Evolution mission, scheduled for launch in November 2013.
Redesigning a Built Spacecraft
The Mars Phoenix project team was faced with a task somewhat similar to that of the Mars Exploration Rover’s entry, descent, and landing designers: to take a system designed for one mission and perform a very different mission. But they faced one big difference: their spacecraft had already been built. They had much less flexibility than the MER team had. The 2001 lander had been designed for a mid-latitude landing site, not a polar one, so its thermal and power system designs had to be reevaluated and altered. One early decision was to replace the original lander solar arrays with more efficient triple-junction type cells to increase the lander’s available power. But several other changes were made to the spacecraft and payload to accommodate the new mission and to respond to changing understanding of its environment.
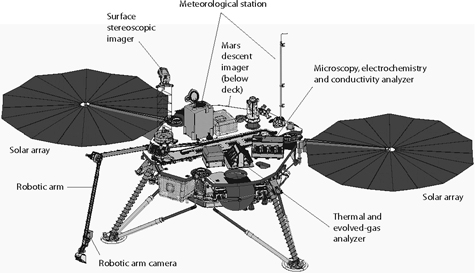
Mars Phoenix lander, in landed and deployed configuration.
One major change was to the cruise stage. The launch opportunity in August 2007 was less favorable than the 2001 opportunity the lander had been designed for, with Mars further from the Sun. This left the project’s engineers with a power shortfall late in cruise. Their solution was to cover the sunward-facing part of the cruise stage with a third solar panel. This solved the power shortfall at the cost of requiring a complete reworking of the cruise stage. The solar panel generated heat while also preventing the other heat-producing components of the stage from radiating to space. Lockheed’s lead thermal designer, Loren Zumwalt, had to redo the vehicle’s thermal analysis, then redo the stage’s layout. Some components had to be moved, heat pipes added, and thermal blanketing rearranged. The thermal rework cost Phoenix project manager Barry Goldstein about $2.5 million of his project reserve.1 By contrast, Zumwalt recalled, not much needed done to alter the lander for the thermal conditions of its surface mission: “The lander came across pretty cleanly. The design that was intended for the equator went to the polar attitude with very few changes in terms of the spacecraft system.”2
The Phoenix project also had to respond to the Mars program’s demands for communications during all “critical mission events,” a requirement imposed to ensure that in the event of a failure, JPL’s engineers could reconstruct what had gone wrong from telemetry. This resulted in a major reworking of the telecommunications design of the vehicle. After the harsh criticism of Polar Lander’s lack of EDL communications (an option not permitted to the earlier Mars Pathfinder), Surveyor 2001 project manager George Pace had planned to develop a “black box” that would survive a crash and send recorded telemetry back via an orbiter. But Goldstein’s team did not like that approach. In addition to representing an expensive and risky new development, the black box consumed volume inside the aeroshell that the project did not really have.
Instead, the team tried to find a way to maintain continuous communications throughout EDL, despite the reality that their lander, unlike Polar Lander, had no direct-to-Earth capability. And while the team tried to figure out how to rearrange things inside the aeroshell to allow provision of an X-band direct-to-Earth link, they ultimately couldn’t do it. The requisite antenna could not be stuffed into the aeroshell without dropping some other important equipment. This situation led them to depend on the three orbiters circling Mars for relaying EDL communications and to a search for an antenna design that would ensure that at least one of the three would be able to receive the lander’s UHF signal. After several design iterations, they chose a conical antenna that was wrapped around the top of the backshell. It offered omnidirectional communications, relatively low impact on the existing vehicle systems, and a very high data rate. While the MER rovers had only been able to send semaphore tones during their landings, the Phoenix lander would be able to return digital telemetry continuously if everything worked as they intended.
While various aspects of the Polar Lander and 2001 lander hardware had to be reengineered to meet the needs of the Phoenix mission, the biggest challenge was ensuring a safe landing. Goldstein and Parks believed that merely responding to the specific findings of the various Polar Lander failure reports would not be sufficient. They began a set of inheritance reviews of the 2001 lander hardware and its supporting documentation, planned to build a hot-fire testbed to put to rest concerns over the lander’s terminal descent system, and intended a thorough vetting of the rest of the EDL system. By the time they were done, fixing all the problems they found with the 2001 lander had driven the cost from $355.7 million (as proposed in May 2003) to $414.2 million.3
An early discovery by the project was that the 2001 lander structure was too weak to withstand the inflation of the parachute.4 This derived from an error that the Mars Pathfinder team had made in calculating the parachute’s inflation load but that was later caught and fixed. John McNamee’s 1998 team had adopted the early Pathfinder calculations, not the reworked later ones, and the error had moved from there to the 2001 project. Simply put, if Polar Lander had lived long enough to deploy its parachute, the chute would have torn the tripod structure that held it to the lander deck off and floated away. It was a fatal design flaw.
Found in May 2004, the parachute problem forced the team to do a set of trade studies to determine the best solution. The options available to them were to have a new, smaller parachute manufactured, to strengthen the lander structure to accommodate the existing parachute, to deploy the parachute at a lower velocity (and therefore altitude), or to try a combination of these. They chose to shrink the parachute and reinforce the structure, leaving them with a terminal velocity that was higher than the 2001 lander had been designed for. That meant the lander would use more fuel in landing than had been allocated by the Surveyor 2001 project. Since Phoenix, unlike Pathfinder and MER, used the same fuel tanks for cruise to Mars and EDL, and the tanks could not get larger, fuel use during cruise had to be “squeezed.” As Phoenix project engineer Robert Shotwell recalled, “There was a nice balancing act we had to do with propellant usage for cruise and propellant usage for EDL.”5 By the project’s critical design review late the following year, they had adopted this suite of changes.6
A little later in 2004, the inheritance reviews held with Lockheed engineers out in Denver uncovered a more systemic problem. Lockheed, like JPL itself, required every piece of flight hardware that was delivered to the vehicle assembly floor to be accompanied by a package of documentation, analysis, and test data validating the hardware’s conformance to its requirements. The 2001 lander project had already reviewed and accepted all this documentation and its associated hardware; Goldstein, Parks, and Lockheed project manager Ed Sedivy decided not to accept the 2001 project’s certifications. Instead, they reran the hardware certification reviews. “What was amazing,” Parks recalled, “was that it wasn’t a few flaws that we found in the delivery packages; it was that the shortcomings were the rule, not the exception.” Documentation was often missing, and testing was “wholly inadequate.”7 The review panel Parks had assembled for the telecommunications subsystem had made this point most strongly in their review outbriefing, stating, “There is [sic] voluminous missing background data on inherited components,” and so the panel could not certify that the review objectives had been met.8
Parks, who had earlier been project manager for JPL’s portion of the Herschel-Planck mission, reflected later that these inadequacies were a consequence of the faster-better-cheaper experiment. One principle of faster, better, cheaper had been reducing documentation and testing, enforced through demands for ever-lower costs. The elimination of institutional design and testing standards in pursuit of that principle had resulted in cut corners. But, he said, “the magnitude of the corners cut was beyond belief for me. That was the real eye-opener.”9 Goldstein and Parks challenged their Lockheed counterparts to locate the missing data and to re-create through retest that which could not be recovered. They held these delivery reviews again when the project began its assembly, test, and launch operations phase in the spring of 2006.
Goldstein and Parks’s finding that much more work would have to be done to requalify the supposedly qualified hardware produced a major cost increase, estimated at about $20 million in early 2005. At the same time, Wayne Lee, who had become the manager of JPL’s EDL group after completing his service on the MER project, was advocating increasing the Phoenix EDL task funding. Lee thought Goldstein’s team had not planned for enough testing of the EDL system and its various components, and he had taken his argument up JPL’s chain of command. In the risk-averse environment of the period, his arguments were accepted, and Goldstein made the pitch to NASA headquarters officials for more money. This gained Phoenix a further increase of $18.1 million. By May, the project’s cost cap had been raised to $385 million.10
More troubling news reached JPL in the summer of 2005, as Loren Zumwalt’s analysis of the vehicle’s thermal state came together. The thermal model showed a large variety of violations, with some components, such as the star trackers, getting too warm and others, including the lander legs and their deployment hardware, far too cold.11 The heat shield separation nuts were also too cold, and the thermal team had to add heaters to them. But by far the worst thermal exceedance, discovered sometime in the summer of 2005, was by the separation connectors that were supposed to release the aeroshell from the cruise stage prior to entry into the martian atmosphere. At the temperatures Zumwalt’s model estimated for Phoenix’s arrival at Mars, these were some 60°C below their limits. When Lockheed’s mechanical test engineers tried to operate them at those predicted temperatures, they were, in essence, frozen solid.12
Like the lander’s inadequate structural strength, this was a catastrophic design error. It meant to Goldstein and Parks that Polar Lander probably failed because these connectors never separated.13 In that event, the cruise stage would have remained attached to the lander aeroshell as it entered the atmosphere, and the resulting atmospheric turbulence would have destroyed both vehicles. (This would also explain why the Deep Space 2 microprobes were never heard from. They were to be released by the physical separation of the cruise stage and aeroshell, which never happened, if Zumwalt’s model were correct. They would also have been destroyed.)
Fortunately for Phoenix’s engineers, this design flaw was relatively easy to fix. They added heaters to the separation connectors to warm them up to their qualified operating temperature range before entry. The heaters ate into their already thin power margins late in the flight to Mars, but they solved the problem relatively inexpensively.
By contrast, the hot fire testbed of the descent engines, the centerpiece of the project’s response to the findings of the Polar Landing failure review board, was tested very successfully at the same time as the thermal problems were coming to light. Lockheed’s engineers put it through two series of tests. One, a “cold firing” series used water instead of fuel to demonstrate the design’s resistance to the perceived problem of water-hammer in the piping; after replacing copper fittings that should not have been in the testbed (hydrazine and copper react explosively in each other’s presence), a second set of hot-fire tests was performed. These tests demonstrated that the system worked as intended and was controllable, even though it had a few minor problems.14 Shockwaves produced by the thrusters caused some minor damage to nearby lander structure, and some of the fuel lines needed more secure mountings. After several complete “landing” tests, some of the thrusters also developed small leaks, causing some concern within the science team about possible hydrazine contamination of the landing site. The team strengthened the structure around the nozzles and remounted the fuel lines, but after analysis of the thruster leaks decided not to try to fix them. The testbed thrusters performed the equivalent of several Mars landings and in consequence suffered much more wear to their valves than those on the flight lander would, so the project’s propulsion engineers did not think the flight lander would experience similar leakage.
Shotwell also had Lockheed investigate another potential failure mode that had, up to Phoenix, not been considered by any project: the possibility that pieces of the cruise stage could hit the aeroshell during entry. In the direct entry trajectories used since Mars Pathfinder, the cruise stage followed the aeroshell into the atmosphere on the same trajectory, and because the cruise stage was not designed to be aerodynamically efficient, engineers’ expectations were that it would fall further and further behind while disintegrating. Shotwell suspected that expectation was probably not quite right, because the cruise stage contained some pretty heavy, solid pieces. Once released during the breakup, they might experience a reduction in drag forces, allowing them to catch up to the aeroshell and possibly hit it. So he funded Lockheed to do an analysis of the cruise stage breakup and the aerodynamics of its resulting pieces. Sure enough, the launch vehicle adapter, the telecommunications power amplifiers, and a few other items were heavy enough in mass and low enough in drag to catch, and even pass, the aeroshell. While this was still a fairly low-risk problem (the pieces would likely tumble and not follow the aeroshell trajectory exactly), in the risk-averse environment of the 2000s, it was unacceptable. The project solved the problem by adding a maneuver to the entry sequence that turned the vehicle off its entry trajectory just before releasing the aeroshell and then used the maneuvering thrusters in the backshell to put the aeroshell back on course after the cruise stage released it.15 That way, the cruise stage would not be following the aeroshell. The maneuver was only possible because the 2001 lander had had attitude control thrusters in its backshell as part of its precision landing experiment. Neither Pathfinder nor the two MER entry vehicles were equipped with thrusters, and could not have performed any maneuver.
Those thrusters, though, gave the project team additional headaches. In simulating the aeroshell’s aerodynamics, Langley Research Center engineers discovered that during a short portion of the vehicle’s hypersonic flight, the thrusters could cause the vehicle to tumble. This happened because at certain velocities, the effect of the thrusters reversed. When a thruster fired to tip the aeroshell in one direction, the aeroshell would tilt the opposite way. (This had to do with the way the thruster flow fields interacted with the airflow around the backshell at different velocities.) The flight software would not understand that and would again fire that same thruster to compensate, eventually causing the vehicle to tumble out of control. This was actually a “known problem” within the aerodynamics community, first discovered during the X-15 flight program in the 1960s and long ago fixed within NASA’s human flight programs. But the knowledge had not transferred over to the Mars program’s robotic efforts in the 1990s. Discovered very late in the project, December 2006, only eight months before launch, this “hypersonic thruster efficacy” challenge was fortunately easy to fix. The team reprogrammed the spacecraft to turn off the attitude control thrusters during that short piece of the entry sequence and reactivate them after it had slowed below the dangerous velocity range.16
While each of these design flaws was serious, and in a couple of cases fatal, the system that caused the project the most difficulty, and ultimately cost so much to overcome that it forced NASA to hold a termination review late in January 2007 due to the excessive cost overrun, was the vehicle’s radar. The Mars Polar Lander red team review board had fingered the radar as a potential problem because the off-the-shelf military radar that John McNamee’s Surveyor 1998 team had chosen seemed to give misleading data over sloped terrain, so when the Phoenix project got started, Goldstein and Parks knew they would have to carry out a fairly intensive test program to retire this known risk.17 One initial decision was to replace the two radar units bought by Surveyor 2001 because they had been built with parts that were not traceable back to screened, space-qualified lots. They ordered units built from screened parts and used the original flight units for the flight-testing necessary to help understand and resolve the slope problem.
The initial radar test took place in February 2006, at the manufacturer’s plant in Minnesota. Dara Sabahi, the chief engineer, reflected later that they found five separate, unique problems with the radar that day.18 He drafted several specialists from JPL’s radar section to help understand and fix them; in March they found ways to either eliminate or mitigate four. But in retests done at Dryden Flight Research Center in April, the team found still more problems. The radar took far longer to lock on to the surface than it should, and worse, the beam that usually locked up first was not the vertical beam intended to sense altitude but one of the side-looking beams intended to measure velocity. This produced an incorrect altitude measure. The side-looking Doppler beams also had a positive velocity bias, sensing a meter/second or so of speed that was not actually present—an acceptable amount of error for the jet fighter the radar was built for but not for a Mars lander that could not tolerate more than 2 m/sec of velocity at impact. And there were other troubles, too.
Sabahi established a tiger team to begin digging deeply into the radar. Understanding why it had these problems was made somewhat difficult by the contractual arrangements involved. The radars had been bought “off the shelf” from Honeywell, which sold thousands of them to many customers; JPL was not a large client that carried much weight with the company. And the radar was proprietary, so JPL was in a weak position to be asking for access to the company’s intellectual property. The legal challenges were made more difficult by the presence of Lockheed as a middleman, which, as the prime contractor, had actually purchased the radars, and, of course, the flight software that received and interpreted the radar signals was proprietary to Lockheed. So getting the JPL tiger team access to two sets of proprietary software was its own challenge. Sabahi credited his counterpart at Lockheed, Tim Gasparrini, for pushing the negotiations within his company forward so that the problems could be investigated and resolved.19
With only a little more than a year before launch, the tiger team’s investigation pursued several tracks simultaneously. More flight and drop tests took place in April and May out at Dryden, and technical interchange meetings with Honeywell engineers began that month, too. From his pot of EDL robustness money, Wayne Lee had had the foresight to finance development of a simulator that would allow “dropping” the flight radar thousands of times in simulation relatively quickly, and assembly of that system also began in May.
The May tests at Dryden uncovered still more anomalies. Lockheed had built a test rig that enabled a tethered radar to be dropped from a helicopter at the right altitude and velocity for a Mars lander, permitting more realistic tests than those flown by Honeywell back in February. After 33 flight and drop tests, they had accumulated 13 different problems.20 Due to the high risk posed by the radar’s increasing troubles, JPL senior management formed a radar advisory group to oversee the tiger team’s work.
Technical interchange meetings with Honeywell engineers determined that the company already knew about some of the faults and had fixed them in its current production units, but of course the units Phoenix had were built in the late 1990s for Surveyor 2001 and obsolete. And the project’s two new radars were being built to replicate the 2001 model, not the current production model, because it was important to the project’s engineers that all their radars behaved the same way. So fixes were already known for some of the flaws, narrowing what the team had to address.21
During the summer, the tiger team’s engineers were able to fix most of the remaining problems by revising the radar’s “firmware,” software that was embedded in the radar’s electronics, or by altering the lander’s software to deactivate some of the radar’s potentially problematic modes or to reject obviously wrong measurements (“data editing,” they called this). They also chose to simply accept some of the radar’s less-critical problems after analyzing them.22 In September, they gained another new problem, however, when the side-looking antennae that enabled measurement of horizontal velocity failed in the spacecraft’s thermal vacuum tests. They had been made of two different metals with different thermal expansion rates; in the extreme cold of space, the antennae became distorted and created unacceptable beam patterns. The project had to design, procure, and install new antennae by March 2007.23
In October, the radar team carried out a large series of new tests at Dryden designed to determine whether that had fixed most of the known problems. Sixty test drops helped convince them that they’d fixed or mitigated most of the radar’s performance troubles. The drops did not reveal any major new troubles.24 On December 1, the tiger team hosted a review by the radar advisory group and an independent review team, who validated their conclusions.25
But the radar team was not quite out of trouble. Later that month, the radar simulation effort turned up a new problem: the radar could lock on to the heat shield and, thinking it had detected the surface close by, raise its pulse repetition frequency and trigger the final landing sequence. But the lander would be too far above the actual surface to land before running out of fuel. This was a problem that could not have been discovered by the drop test program, which had no way of simulating a heat shield dropping away from the radar. Sabahi, who had been keeping a “fever chart” summarizing the tiger team’s activities and the associated risk, had initially painted December’s risk level green. In January, he switched December to yellow, and he painted January red.26
At the same time, the project uncovered another, potentially very expensive, problem. Late in 2006, Lockheed’s engineers had pulled the 2001 lander’s backshell out of storage and found that its thermal protection coating did not meet the requirements. It was not the correct density. It had been put into storage in that condition; George Pace’s engineers had documented that and, in the risk-taking posture of the era, accepted the resulting risk. Phoenix’s engineers could not accept the risk without verification that it would not produce a failed mission, so they took samples of the material for arc jet testing at Ames Research Center. The team also attempted to replicate the material to see if newly made coating would pass the tests, but they found the material could not be replicated. Something was wrong with the manufacturing process. And when they put the vehicle into its first thermal vacuum test in December, the protective coating cracked—they could not know how deeply until they pulled it out again in January, disassembled it, and performed some tests. But by then, the project was out of money.
In October, with his financial reserves entirely eaten up due to all the known problems, and being fairly certain new problems would be found in the remaining eight months before launch, Barry Goldstein had presented to his principal investigator, Peter Smith, and NASA management a preliminary cost-to-complete estimate that required a budget augmentation of $26.6 million. Under the rules governing cost-capped missions, NASA was required to hold a termination review before approving additional funds. It took place at the end of January. By that time, a grassroots scrub of the entire project budget put the estimate at $31.1 million, or 8.1 percent above the $385.6 million cap.27 At the review, Goldstein explained that the project’s current completion plan required about 3,500 work-months of effort; remaining within the cap would require removing a little over 1,300 work-months from the schedule. “The associated removed work,” he told his superiors, “would introduce unacceptable risk.”28
By this time, NASA officials had become very uncomfortable about the Phoenix project. Dara Sabahi remembers that they increasingly did not want to fly the vehicle—too many severe problems had been found. But they had already spent a lot of money, and critics of NASA would doubtless use cancellation as a justification for attacking the agency.29 Forcing Goldstein to finish the project within the cap was an even worse option. If the project did not finish the radar rework effort, or the backshell thermal protection replacement, or fix their latest problem (during the backshell separation test, the backshell hung up on the lander’s thrusters and bent some of them) due to insufficient funds but launched anyway, failure of the mission seemed very likely. The critics would pounce. Science Directorate officials had no good options other than approving the increase, and they did.
Goldstein had gone into the termination review assuming he would be the review’s casualty. Managers of JPL cost-capped missions who overran their budgets were generally removed; by 2007, this had happened to a few project managers in JPL’s projects funded by the Discovery program. Because of the difficulty inherent in actually cancelling a project that was far along in its development phase, this was really the only way any kind of accountability could be imposed by either NASA or JPL management. “I survived, though,” he recalled.30
During the remaining few months before launch, the project was able to clear up its known problems, and a few more. Radar tests in April 2007 indicated that the fix the tiger team had thought up for the heat shield problem, changing the pulse repetition frequency, would resolve the issue without introducing new ones. But soon after, they also found a new radar problem. The intended flight radar, newly built to meet the traceability requirements, took several tens of seconds to lock on to the surface again if it was suddenly shut off and then turned back on again (“power cycled”) when it was at 250 feet altitude. While this was not supposed to happen, the radar’s own fault-detection procedures could cause the radar to power cycle automatically. Investigation by Honeywell’s engineers determined that the fault occurred in only a single temperature range, due to an error in the radar’s firmware (somewhat ironically, the original pair of radars built for the 2001 lander did not have this error).31 The team fixed this problem too, even though it was unlikely that the radar would reboot itself, at exactly that temperature and altitude, during the real landing. And they scheduled still more flight tests, this time at very low altitudes, for the following February to make certain there were no more low altitude anomalies.
The Phoenix team continued to find problems in the vehicle in the months remaining before launch, but none that were as severe as those found during 2005 and 2006. Another temperature-related radar flaw cropped up and was solved simply by heating the radar prior to entry. The lander’s key instrument, the thermal and evolved gas analyzer (TEGA), built by Bill Boynton’s team at the University of Arizona, developed an intermittent reset problem that the team thought they had resolved prior to launch, but which resulted in the instrument being reintegrated to the spacecraft very late down at Kennedy Space Center. And the circuit board that controlled data flow along the serial bus inside the spacecraft had a design flaw that caused it to reset when it received data from the science instruments at certain temperatures. If this happened during EDL, it could be severe—the flaw caused the spacecraft to lose data from its inertial measurement unit, which was an unacceptable risk. Mike Malin’s descent camera, MARDI, was the only instrument in use during EDL, and the project’s proposed resolution was to permit him only a single image, whose data would not be read out until after landing.32 After a post-launch meeting in November, though, Goldstein and Parks convinced Peter Smith that even that one image involved too much risk. Parks recalled that while the risk was low, the availability of the high-resolution imaging science experiment (HiRISE) to provide the larger geologic context that MARDI’s descent imaging was intended for tipped the decision toward simply leaving the camera off.33
Goldstein’s engineers got Phoenix off the launch pad and on its way to Mars on August 4, 2007.34 The launch itself was flawless, and so was the post-launch checkout, with one exception: TEGA had water contamination that made it unlikely to meet one of its requirements, to be able to distinguish between normal and “heavy” water. The project’s mitigation plan was a series of long bake-outs during cruise, heating the instrument ovens to drive the undesired water out of the instrument.35
Landing Site Selection
Peter Smith, the Phoenix principal investigator, was responsible for the site selection, and he relied on the help of Ray Arvidson of Washington University in St. Louis to manage the process. Principal-investigator-led missions did not require the open community process that MER and Mars Pathfinder had used; instead, site selection was done through a pair of workshops that were largely internal to the project science team, with some assistance from the Mars program office.
Smith had initially proposed sites selected from a region around 67.5°N and 240°E, which was low-lying, smooth, and appeared in Bill Boynton’s gamma ray spectrometer data to be rich in near-surface water ice. Because of the early suspicion that Phoenix would not be able to land successfully on high slopes, Smith and Goldstein had agreed that the site had to have slopes less than 20° at the lander’s scale. And because they knew Phoenix, like any other legged lander, was vulnerable to rocks larger than the landing deck height, they also had limited the site’s rock size to less than 0.4 meters.36
The science team’s site survey had generated four areas around the region that seemed to have appropriate characteristics. Data from the Mars orbiter camera and thermal emission imaging system (THEMIS) suggested that individual sites existed within those areas that met the standards, and Smith and Arvidson decided to focus on what they called “Region B,” a wedge between 120° and 140° east longitude in the interior of the Vastitas Borealis. Region B had the lowest elevation, providing the longest entry sequence (and valuable “timeline margin”). It was not, based on the MOC images, the region likely to have the lowest rock abundance, but the science team convinced themselves that the region would still be within the standard established by the Viking 2 landing site—preferred by the engineering team because it was a known, flat plain with many very small rocks.37 Because of the deep cold of the northern polar plains, the THEMIS data was not definitive about the rock abundance, though, and Mike Malin suspected that the team’s analysis was wrong. He thought dark areas in his images were likely to have lots of large rocks.
The landing site selection subteam chose a landing ellipse within Region B in the summer of 2006 and asked Alfred McEwen to image within it using his HiRISE camera while Mars Reconnaissance Orbiter was still in its “transition” orbit phase. This had to be done because by the time MRO reached its science orbit, there would no longer be enough sunlight for HiRISE to produce images at its highest resolution. McEwen’s team got eight images within Region B during September and October. The images revealed that Region B, and especially the part of it they’d been focusing their attention on, was full of boulder fields. Rocks exceeding 8 meters in size seemed to be frequent; the mission design and science teams simply couldn’t fit Phoenix’s landing ellipse anywhere within Region B that didn’t include at least one of these boulder fields. This produced what Matt Golombek termed a “freak-out period,” for they had very little time to pick new spots in the martian high latitudes for HiRISE to target for new imaging before the Sun set and the north polar region began its long, cold, dark winter. So by the tenth science team meeting in mid-October, the team had abandoned Region B and had reopened investigation of Regions A and D, far away from their original site and dominated by different geology.38 These regions were higher altitude, requiring some rework of the EDL timeline by the engineers, but MOC and THEMIS data suggested were likely to be much lower in rockiness.
Arvidson put a graduate student of his to work automating the process of rock identification and counting, with the aid of programmers at JPL.39 They relied on new HiRISE images of the Viking 2 landing site to calibrate the model, which was designed to automatically identify and count rocks within HiRISE imagery. This automation was necessary because HiRISE full-resolution images were enormous—whole walls of the MRO operations area at JPL were covered by printouts of single images—and the team lacked time and funds to do manual rock counting and then compare the results to the much larger supply of MOC and THEMIS images. While that model was being prepared and tested, the landing site effort turned to the THEMIS thermal imagery again, looking for areas of Regions A and D that appeared very cold in early morning, an indication of low rockiness.40
The area they finally chose was a broad valley in Region D, on the other side of Mars from their original site. One end of the landing ellipse just missed a large crater.41 Tentatively chosen in February 2007, the landing area could not be imaged again by HiRISE until late in 2007—well after launch—because of the onset of winter. What confidence in the safety of the landing site they could develop came from the efforts to cross-compare THEMIS, MOC, and the handful of HiRISE images already available to validate the automatic rock-counting model that was in the works. New HiRISE images obtained in the martian spring of 2008 would confirm the site safety; the project’s planned trajectory correction maneuvers would have to be used to retarget, if necessary.
Fortunately for the project, when the Sun finally rose again over the martian south pole, new HiRISE images confirmed that their valley (they named it “Green Valley”) had low slopes and few rocks.42 At the site certification review in March 2008, Lockheed’s Tim Gasparrini presented a Monte Carlo analysis indicating a touchdown failure probability of under 5 percent for the site.43 The rockiness of the Green Valley site was acceptable.
Operating Phoenix on Mars
Landing day for the Mars Phoenix was May 25, 2008, Memorial Day weekend in the United States. The operations plan for the mission was that landing would be monitored at JPL, but once safely on the ground, JPL engineers who’d relocated to the University of Arizona’s new Science Operations Center would take over, with Lockheed engineers in Denver providing lander health, power status, and other engineering statuses remotely, just as they did for Mars Odyssey and Mars Reconnaissance Orbiter. Because Phoenix did not have direct-to-Earth communications, it would be operated solely via UHF relay. Barry Goldstein’s deputy had negotiated agreements with the MRO, 2001 Mars Odyssey, and Mars Express flight teams to have them positioned to provide those relay services. They had also worked a deal with the National Radio Astronomy Observatory in Green Bank, West Virginia, to monitor the spacecraft’s signals, just in case.
Joel Krajewski, who had been brought over from MER to reprise his role as lead for the transition from EDL to surface operations, had devised a timeline for the lander that began with signaling a successful touchdown, and then doing some internal housekeeping while waiting for dust kicked up by its thrusters to settle—venting pressure from its tanks, writing telemetry data to flash memory, and after one minute, shutting down its transmitters to save power. After 15 minutes, it would deploy the solar arrays, release the biobarrier that protected the robotic arm, and raise the meteorological and surface stereo imager masts. Then it would take a few images chosen to prove that each of these events had succeeded. Because MRO and Odyssey orbiters only overflew the landing site every two hours, the team in Arizona would have to wait to see these results. Touchdown would be about 4:53 p.m. at JPL (and about 4:00 p.m. local time on Mars); the teams at JPL, Arizona, and Denver would find out if the all-important solar panels had deployed, and they had a viable mission, a little after 6:00 p.m.44
Jim Erickson, who had become project manager for MRO, had been asked in February 2006 if there was a way to photograph Phoenix with HiRISE during its descent. The inquiry had provoked a good deal of examination within the MRO project. MRO’s first priority was recording Phoenix’s telemetry stream, and that function could not be put at risk. But getting an image would be very useful for failure reconstruction—if there were a failure—and it would be a great public relations coup if Phoenix landed safely. The telemetry requirement already put MRO in almost the right position to capture an image; the challenge was to get the spacecraft’s slew rate right and HiRISE set up correctly. The camera’s pushbroom nature made that task easier. It could scan a large part of the landing ellipse, so unless Phoenix was far off its trajectory, the HiRISE team was likely to get an image. Lockheed’s engineers thought it could be done; Rob Manning, then in the Mars program office, really wanted to try to get one or two images; at the same time, in the more risk-averse climate in the 2000s, Erickson’s team had to convince JPL reviewers that they had put sufficient rigor into their analyses and understood all the risks. He gained JPL’s institutional approval after a meeting on May 1.
Phoenix’s entry sequence started with the turn away from the entry trajectory to ensure the cruise stage did not follow directly behind the aeroshell, followed by cruise stage separation and the aeroshell’s turn back to the proper entry alignment. Receipt of the signal that this had all been accomplished correctly was greeted by Barry Goldstein with a huge sigh of relief. By this time, he was convinced that this was the point at which Polar Lander had come to grief. After that, Richard Kornfeld read out the entry deceleration numbers as they came back down from Mars. Everything seemed perfect until parachute deployment, which was late—it felt painfully late but in fact was only seven seconds behind the expected timeline. This was the only glitch, though. The heat shield ejected properly, the troublesome radar found the surface correctly, the thrusters all worked, and the vehicle parked itself safely on the martian surface at 4:53 p.m. Pasadena time, to cheers at JPL.

Celebrating the Phoenix landing. Left to right, Lockheed’s Ed Sedivy, JPL’s Barry Goldstein, and University of Arizona’s Peter Smith.
JPL image PIA D2008_0525_T136A, courtesy NASA/JPL-Caltech.
A couple of hours after the landing, Erickson walked into the press support area that had been set up in JPL’s Von Karman auditorium to begin telling people that the imaging experiment had actually worked out. HiRISE had caught Phoenix on its parachute, descending toward, it appeared, the very imposing-looking 700-meter-deep crater they named Heimdall.45 This was somewhat of an illusion created by the angle between the two spacecraft; Phoenix was actually about 20 km in front of the crater.46 It had landed 21 km “long,” much closer to Heimdall than intended, nonetheless. Reconstruction of the entry sequence by a joint team from JPL, Langley, and Lockheed eventually suggested that the aeroshell had generated slightly more lift than expected, placing the lander farther down track.47 Erickson commented afterward that this was the first time anyone had actually seen a Mars parachute work. “We could even see the risers on the parachute.”48
Out in Arizona, attention turned to getting the lander into commission. Data back from Mars Odyssey on the first overpass after Phoenix’s landing showed the solar arrays and instrument masts had all deployed correctly, and the vehicle was generating power. Krajewski’s timeline had the first sol on the surface taken up by imaging of the spacecraft and its landing site, the second sol for unstowing the robot arm and the beginning of instrument checkouts, and sols 3–6 for continuing instrument and landing site checkout. By sol 7, he hoped to get the first surface sample into TEGA. The surface itself was flat, with polygonal structures like those typically found in Arctic tundra throughout the visible landscape. It was devoid of large, and even medium-sized, rocks. Instead, like Meridiani, it had scatterings of pebbles and small rocks, mostly smaller than the robot arm’s scoop.
Krajewski’s timeline did not evolve quite as expected after the nearly perfect landing day. The biobarrier did not completely retract but could be worked around. Commands sent up on sol 2 to release the robotic arm did not reach the spacecraft due to a glitch on MRO, so Phoenix kept running a backup command sequence that generated more images.49 This put the operations team a day behind the timeline; meanwhile, another problem cropped up in the checkout of TEGA. The telemetry stream seemed to indicate that the instrument had an intermittent short circuit.50 JPL’s design requirements ensured that the short could not kill the spacecraft itself, but it could damage, or even disable, TEGA. As understanding of the nature of the problem percolated up through the project and then to NASA management, it became the single biggest threat to achieving a fully successful mission.
Discovering the magnitude of TEGA’s electrical problem took time, though, and meanwhile the surface operations team pushed ahead. On sol 5, they had the robot arm camera take a picture of the surface underneath the lander. This produced a beautiful image, showing that the landing thrusters had swept away the dirt overlying what looked like a sheet of solid ice. While they had expected soil cemented by ice, the team had not expected an ice sheet. But the image showed a surface that looked like a smooth, frozen lake—or an ice skating rink. What else could it be but ice? But they refused that speculation, needing better evidence that the smooth, shiny surface was really water ice. The image validated the choice of landing site, though. The icy layer they wanted was only a few centimeters below loose dirt.51
One week after landing was the first time they were able to dig up a sample, photograph it, and dump it in a designated area. But some of the dirt stuck to the scoop, and they decided to make another attempt. They needed a precision delivery because TEGA had a second problem: not all of the ovens opened completely. A machining error had caused some of them to open only partially, including the first oven they needed to use. After the second dump experiment completed successfully, the team ordered Phoenix to dig its third sample and dump it into a TEGA oven. The sample did not go in. The arm delivered it properly, as it turned out, but a screen placed over the oven intended to break up clumps prevented the soil from entering the oven. The martian soil’s clumpiness proved too great. Vibrating the screen the next sol for 20 minutes did not work, either.52 The robot arm team began working on a new delivery method in their testbed at the university, using the rasp on the scoop’s bottom to vibrate the scoop over the oven in the hope of sifting dirt, instead of dumping it. That seemed to work, and was first used to sprinkle some soil for study by the lander’s optical microscope.

Ice beneath. The Phoenix lander’s robot arm camera took this image under the lander shortly after its descent. The silver objects at the top of the image are the lander’s descent engine nozzles. The project scientists interpreted the white patches as ground ice blown clear of loose surface material by the descent thrusters.
JPL image PIA10741, courtesy NASA/JPL-Caltech / University of Arizona / Max Planck Institute.
Meanwhile, on sol 16, Mars threw Boynton’s TEGA team a bit of a curve ball. The day after the sprinkle technique was tested, the team ordered another shaking of the TEGA screen, and this time it worked. The soil sample that had been sitting on top of the fourth oven’s screen suddenly fell into the oven.53 Nobody knew why. But the team ordered Phoenix to start testing that sample on sol 18.
In digging its first trench, the lander had turned up some bright chunks of material that some science team members thought had been ice, and these chunks—rather, their disappearance over the next four sols—became the subject of the project’s first big post-landing press conference. On June 20, the science team announced that the chunks must have been water ice. Carbon dioxide ice would not have still been present at the landing site’s temperature, and the other alternative, some kind of salt, would not have simply sublimated away. Only water ice would have gradually vanished over a few days. “It must be ice,” said Peter Smith at the news conference. “These little clumps completely disappearing over the course of a few days, that is perfect evidence that it’s ice. There had been some question whether the bright material was salt. Salt can’t do that.”54
Their next step was using the new sprinkle technique to feed Michael Hecht’s Microscopy, Electrochemistry, and Conductivity Analyzer (MECA) instrument, which was designed to examine soil chemistry and electrical conductivity.55 This worked well. But TEGA’s short-circuit problem reared its head again on sol 26. It appeared that the shaking they had ordered on oven #4, hoping to get the sample to drop in, had exacerbated the short circuit. The science team delayed delivery of the next sample to oven #5 while the engineers tried to develop a better diagnosis of the problem’s severity. Instead, they began testing the rasp’s ability to dig into what appeared to be an ice layer a few centimeters below the surface. But the engineers’ conclusion was that the short circuit was bad enough that the next use of an oven might be the instrument’s last test.
On sol 36, NASA headquarters intervened in the mission and barred Peter Smith from using TEGA on anything else until the team got a sample of ice into it—not soil, not icy soil, but ice. The requirement came from the NASA administrator via Ed Weiler, and it wasn’t negotiable. It was very difficult to do, though, and it took the team until sol 60 to even attempt to deliver an icy sample. Project scientist Leslie Tamppari called this an “interface” sample, from a soil layer directly above the ice sheet but one likely to still contain water ice.56 The initial delivery attempt failed—the icy sample stuck in the scoop—and Arvidson and Sabahi organized yet another tiger team. The lander’s arm had a grinding tool known as the rasp, and the rasp’s designers remembered that in their testing back on Earth, lights that were being used for videotaping had also caused their icy soil samples to stick to the scoop. They decided to do the sampling as early in the morning as possible, let the sample sit on the surface for a few hours so ice in the outer layer would sublimate away, then scoop up the sample while keeping the scoop out of the Sun until the sample reached TEGA.57 That somewhat complicated process worked, and they got their sample into TEGA on sol 64 and cooked it. The data stream back from TEGA provided the direct confirmation of water ice at the landing site the science team had been hoping for, releasing the team from NASA’s interdiction.58 TEGA itself survived the testing, too, essentially eliminating the team’s concerns about it.
A few days later, Phoenix became subject of a strange eruption of media coverage, due to an Aviation Week and Space Technology article that claimed the project had briefed the White House on major new findings “concerning the ‘potential for life’ on Mars.”59 The reporter, veteran Craig Covault, had apparently heard and misunderstood some discussions among the MECA team about a find that they were still arguing about internally. Some of the MECA team members thought the instrument had found a salt called perchlorate. But TEGA, which should also have found perchlorate’s constituent atoms, had not. Perchlorate is toxic to humans (and thus relevant to human habitability), but bacteria can coexist with it. By itself, perchlorate’s existence has little bearing on the presence or absence of life. The argument over whether perchlorate was really there or not was taking place within the Phoenix team at the same time that the confirmation of water ice was happening; when Covault did not hear the controversial “find” announced at the press conference on sol 65, he apparently thought the news was being suppressed for political reasons.
Perchlorate was not evidence of life, yet that’s how his article was instantly misread across the Internet.60 Covault had specifically stated that Phoenix had not discovered life on Mars, but that did not matter. The hint at a cover-up of martian life was too juicy for Web media to ignore. Smith forcefully denied the existence of the alleged White House briefing to a Space.com reporter, but the controversy whipped up by Covault’s story ultimately forced the team to hold another press conference to debunk the “life on Mars” aspect of the story by explaining the disagreement between the two instruments, how it could happen, and what they were doing to figure out the true state of the soil chemistry.61
All of this occurred while the science and operations teams were making two transitions. The perchlorate press conference was on sol 70; sol 76 was to be the day the project shifted back from Mars to Earth time, and sol 90, the end of the primary mission phase, was the day the project shifted to distributed operations. The engineering support team moved from Arizona back to JPL and Lockheed’s Denver facility, and most of the scientists returned to their home institutions. The overall pace of operations slowed, too. In part, this was because of the return to Earth time, making the planning cycle more challenging for the team, but primarily it was due to the rapidly waning martian Sun. Phoenix’s power state was already declining and would fall more quickly after sol 90, reflecting the return of martian fall. The lander might be able to continue operating the meteorology experiments until perhaps sol 150, but the arm, MECA, and especially TEGA would be useable less and less frequently.
The Phoenix team ultimately got five surface samples into TEGA, four during the primary mission and only one during the extended mission, on sol 136. And the sol 136 sample was not fully analyzed before the lander failed on sol 152.62 Similarly, the wet chemistry lab component of MECA was only able to analyze samples in three of its four cells; apparently, the sample delivered by the scoop to one of the cells got stuck in the cell’s inlet, blocking it.
Phoenix’s end came as a result of the predicted decline in power available from the waning Sun, combined with a dust storm and the buildup of water-ice clouds above the landing site in late October. The lander put itself into low-power safe mode on October 27, and for a few more days Goldstein’s engineers were able to get engineering data, and some science data from the meteorology instruments, back via Mars Odyssey. They hoped that shutting down some of the heaters for the robot arm, TEGA, and other functions would enable them to gain a couple more weeks of meteorology data. But November 2 was the last time Phoenix communicated with any of the orbiters; NASA officials decided to stop listening for it December 1, which would have been Phoenix’s sol 183.63
After the martian Sun rose again and the carbon dioxide ice had retreated from the site in 2010, JPL tried to reach Phoenix without success. The Mars Reconnaissance Orbiter was able to get a clear image of Phoenix in May, though, showing that one, and perhaps both, of the solar panels had been torn off.64 They had never been designed to withstand the weight of the dry ice that had certainly built up on them during the long winter and had probably simply broken away.
What Hath Phoenix Wrought?
Both MER and Phoenix missions added to scientists’ conviction that in its remote past Mars had been very wet. One interesting difference seemed to be that the MER data seemed to reveal a very acidic watery past for Mars, while Phoenix found the opposite. The MECA results for Phoenix’s far northern perch showed a slightly alkaline chemistry, a little more in line with the needs of most life on Earth. Neither mission provided much evidence that liquid water persists on the current surface of Mars; Phoenix saw what most scientists expected, that water ice sublimates straight into the vapor phase without melting first, and only the possibility of brines remained to tantalize those wishing for a watery Mars.
The Phoenix project’s trials with their inherited hardware also validated the sense that many JPL engineers had after the Mars 1998 losses, that the principal technical failing with the faster-better-cheaper era had been inadequate testing. Any complex design will inevitably have errors, and the key to success in the space business was thorough testing. That had been Tony Spear’s argument back in the Mars Pathfinder days, and George Pace, whose lander Phoenix had originally been, echoed him many years later. The 2001 lander’s test program had been “success oriented,” developed based on the belief that the Polar Lander design was sound and would work; when it failed, that test program became inadequate. That and the missing documentary record led directly to Phoenix’s troubles. The engineering teams working for Goldstein and his Lockheed counterpart, Ed Sedivy, had much more corrective work to do than they had anticipated.
The Phoenix project cost $402 million, not including the original cost of the 2001 lander. Because the 2001 lander was only part of Surveyor 2001 (2001 Mars Odyssey was the other component of that project), its cost cannot be known with great accuracy. Roger Gibbs, the Surveyor 2001 spacecraft manager, estimated the lander’s price tag was $50 million; adding that to Phoenix’s price gives a fairer cost of $452 million. Even that understates Phoenix’s true cost, though, since most of the design cost was carried by Polar Lander. But it’s impossible to adequately account for the value of that design work relative to Polar Lander’s overall contract cost. For comparison, Mars Exploration Rover’s cost was $810 million through the end of its primary mission. But that was for two rovers. When JPL had been asked to cost the second rover back in 2000, the basis had been that the second vehicle would increase the project’s cost by a third, making a hypothetical single-rover MER mission about $540 million. Thus the Phoenix mission’s cost was about midway between MER and Mars Pathfinder, whose inflation-adjusted cost was $354 million.65
Some, but not all, of the cost difference is attributable to Pathfinder’s relative paucity of scientific instrumentation and the associated procurement, integration, and science team costs. Some is in testing. For example, Tom Rivellini did 15 full-scale airbag test drops for Mars Pathfinder, while MER did 52.66 Phoenix did not have airbags, but its radar team ultimately did 73 test drops.67 Testing rigor, and cost, expanded after Polar Lander’s demise. The remainder of the cost differential is likely in documentation. The MER project was not able to recover Pathfinder’s blueprints for its “build to print” goal; Dara Sabahi could not recover Pathfinder’s parachute data either. Similarly, Phoenix could not recover some of the lander test data from Polar Lander and Surveyor 2001. All this had to be recreated, and that cost money. One of the tenets of the faster-better-cheaper argument was reduced documentation; the consequence was that future missions could not reuse designs without also re-creating the original test data, raising their own costs. Reduced documentation was a short-term savings with a substantial longer-term cost.
Phoenix’s scientific results are, as of this writing, unclear. Hecht’s team confirmed the perchlorate find, and in addition to the confirmation of water ice at the site from TEGA, Bill Boynton’s team found that the site contained calcium carbonate, which they attributed to formation in thin films of liquid water.68 The perchlorate finding threw into question the old Viking landers’ results, which had not found organic material despite a constant influx of organic material on meteors. Like TEGA, the Viking landers’ mass spectrometers had heated their samples, and perchlorate would have combusted with any organics, destroying them. Another result Tamppari found memorable was the first snowfall seen on Mars. It was photographed on the meteorology experiment’s mirror, which reflected images of a wind telltale provided by Denmark.
The short-lived nature of the mission meant that there was little immediate funding for analysis of the Phoenix data; when the project ended, so did the science team’s funding. Arvidson, who had been involved in Mars missions since Viking, commented: “It was crazy. I’d never been involved in a mission in which the science funding ended before the papers were published, so you really couldn’t pay for page charges because the contract was over.”69 Tamppari explained later that NASA’s rules required that the project’s scientists provide all their data to the Planetary Data System within six months after the end of the mission, and that became their immediate focus. They then had to wait six months after uploading the data before submitting proposals for funding under the agency’s research and analysis program so that other scientists could also write proposals on the data. Then there was another year’s wait before selection and receipt of funding. That delay was intended to help more scientists utilize that data, but it meant fewer immediate results from the mission. Scientists could first get funding for analysis of Phoenix’s data in 2010.70 It will be a few more years before the project’s findings are really understood.
Replanning the Mars Program, Again
Phoenix’s short, exciting life paralleled the onset of another planning cycle for the Mars program, though unlike that undertaken in 2000, this “cycle” would drag on for years without resolution. The Mars science community, via its Mars Exploration Program Analysis Group, remained dedicated to the dream of sample return. During 2009 and 2010, this dedication was validated by the National Academy of Sciences’s Committee on Planetary and Lunar Exploration’s decadal survey, chaired by Steve Squyres. Published in 2011, Squyres’s survey declared Mars sample return to be the highest-priority flagship-class planetary mission for the 2013–2022 period.71
Yet these were poor years in which to restart sample return planning. The worst banking crisis since the Great Depression resulted in a focus on budget cutting, and NASA was not spared. The Vision for Space Exploration program also ran far over budget, and the Obama administration, faced with shrinking tax revenues and growing costs, reopened the question of whether to develop a new launch vehicle. Portions of the aerospace industry had never been happy with the program’s focus on development of a shuttle-derived, government owned and operated launch vehicle. The United States already had commercial launch vehicles with sufficient lift capacity to serve the International Space Station with cargo, and which could be improved to carry astronauts as well; the builders of those rockets, understandably, wanted the government’s business. They found inroads into the new administration, and the administration empaneled (yet another) blue ribbon review of NASA’s exploration policy. That panel concluded the Vision for Space Exploration’s launch vehicle development needed about $59 billion over the FY 2010 budget guidelines it had been given by the White House, or $159 billion over the next decade. Completion on schedule would need, in essence, an increase of the NASA budget of about $6 billion per year.72 That was not in the cards.
In 2010, the administration formally terminated the Vision for Space Exploration program, having already begun transitioning to a new effort, which it calls the Commercial Crew Development program. This was an expansion of another Bush administration effort, commercial cargo development, which sought to replace the shuttle’s cargo-carrying capacity to the International Space Station with commercially procured launch vehicles. The administration’s intended budget for the program was about $800 million per year to foster the development of crew-capable launchers, with much of the rest of the previous program’s funding going to technology development, including heavy lift propulsion technology.73 Congress, however, insisted on a parallel “heavy lift” launch vehicle development—and mandated it without funding it. In fact, the enacted fiscal year 2012 budget cut NASA by about $700 million overall. The funds for the heavy lift development came from reducing the funds available to the commercial crew program to about half of what the administration had requested.74
The administration’s FY 2011 and 2012 budget submissions had projected NASA being flat-funded at $18.5 billion overall, with its Science Directorate also being flat funded for five years at just over $5 billion for the next five years. Much of the cut in 2012 came from funds that had once financed shuttle operations, so the agency’s bet that it could retain those funds for its commercial crew development and heavy lifter development did not pan out. In order to expand the funds available to the commercial crew effort back to what it had intended in 2011, it again had to raid other accounts. The Science Directorate’s contribution to the commercial crew development was about $162 million.
That $162 million contribution, though, hid the true damage to planetary science, which was cut $309 million.75 The remaining funds largely went to fund an enormous cost overrun on the James Webb Space Telescope, which was approved for development in 2004 for $2.5 billion but will exceed $8 billion.76 The $309 million cut to the planetary science budget amounted to a slice of about 20 percent. Mars exploration received the largest cut in absolute dollars, of $226.2 million or 40 percent of its previous budget; the smaller lunar science program begun in the Bush administration was cut by half, and will be zeroed out in 2015 unless Congress intervenes; and outer planets science was cut by about a third.77
These external pressures on the Mars program were mirrored by internal problems. Mars Phoenix’s cost overrun paled compared to its successor, the Mars Science Laboratory, which, like Mars Observer two decades before, saw its launch delayed from 2009 to 2011. The proximate cause of the delay was the inability of the vendor responsible for the “actuators,” the electric motors and gears that drove the vehicle, to deliver on schedule. The consequence was a cost increase from $1.6 billion to $2.3 billion.78 Most of this came from inside the Mars program itself: the sample return technology development program, known as “Safe on Mars,” was eliminated and the funds available for a planned mission in 2016 were reduced, leading NASA to seek a partnership with the European Space Agency for a joint mission in that year.79 The second Mars Scout mission was also delayed two years, in part due to conflicts of interest within the selection committee, and its funds became available. But funds for the next outer planet mission were cut, too. All of these transfers were supposed to be made up for in future years, but the external cuts imposed in 2011 and 2012 made some of those paybacks impossible.
NASA Mars Program budget

The consequence of all this was programmatic turmoil. After the selection in September 2008 of the second Mars Scout mission, Mars Atmosphere and Volatile Evolution (MAVEN), and the first Mars mission to be managed by Goddard Space Flight Center in Maryland, the Scout program was suspended indefinitely. During 2009 and 2010, NASA and European Space Agency officials negotiated and funded a pair of joint “ExoMars” missions to be carried out in 2016 and 2018; NASA abruptly withdrew from them in 2012, and ESA turned to Russia instead.80
Reflecting the dismay among Mars scientists at this surprising turn of events, the chairman of the Mars Exploration Program Analysis Group wrote that his colleagues were
shocked by the severe reduction in the President’s proposed budget profile for NASA’s Planetary Science Division, even though its programs have dramatically advanced our understanding of the Solar System and been so compelling to the public … The cuts threaten the very existence of the Mars Exploration Program, which has been one of the crown jewels of the Agency’s planetary exploration. This occurs at a time when the significant discoveries of the last 15 years were about to inform and enable missions to Mars that will advance dramatically our quest of discovering life beyond the Earth, pave the way for human exploration, energize future scientists, inspire the public, and enhance U.S. prestige in space exploration.81
But the damage was already done. Neither protests from the scientific community nor from the equally dismayed Planetary Society had any significant effect on the decision.82 Thus, after MAVEN’s November 2013 launch, NASA’s Mars Exploration Program, originally built around a demand for two launches every other year, will likely not have a launch until at least 2020. The next approved mission to Mars, InSIGHT, will instead be funded by the Discovery program (as Mars Pathfinder had been). And it will use a variant of Lockheed’s lander, not JPL’s Mars Science Laboratory–derived Skycrane.
The Phoenix project’s success at reengineering Polar Lander was not mirrored by success in reengineering a sustainable Mars exploration program.
Conclusion
If the Mars Phoenix mission represents the final end of NASA’s faster-better-cheaper saga, it also represents the completion of the Mars program’s “follow the water” strategy. Mars’s water has been definitively found, and via the radars on Mars Express and Mars Reconnaissance Orbiter, Mars’s shallow subsurface ice has also been fairly well mapped globally. While questions about the planet’s hydrologic past will continue to be asked—the heatflow measurements to be made by InSIGHT will hopefully address questions about whether Mars sustains deep subsurface reservoirs of liquid water, for example—scientific interest appears to be migrating back toward the Viking project’s old focus on a search for life. Or, at least, a search for the remnants of ancient life. Water is only one of the needs of Earthlike life; living things on Earth also need nitrogen compounds (or produce them as waste products), and they’ve not yet been found on Mars.
It’s important to understand, finally, that the Mars exploration program’s sinking fortunes did not reflect a similar shrinkage of public enthusiasm for Mars. Quite the opposite was true. The very same years that the Mars program was being cut witnessed continued expansion in public interest—and in the offices of the Obama administration’s NASA administrator.