This section describes the components in the user and system address space, followed by the specific layouts on 32-bit and 64-bit systems. This information helps you to understand the limits on process and system virtual memory on both platforms.
Three main types of data are mapped into the virtual address space in Windows: per-process private code and data, sessionwide code and data, and systemwide code and data.
As explained in Chapter 1 in Part 1, each process has a private address space that cannot be accessed by other processes. That is, a virtual address is always evaluated in the context of the current process and cannot refer to an address defined by any other process. Threads within the process can therefore never access virtual addresses outside this private address space. Even shared memory is not an exception to this rule, because shared memory regions are mapped into each participating process, and so are accessed by each process using per-process addresses. Similarly, the cross-process memory functions (ReadProcessMemory and WriteProcessMemory) operate by running kernel-mode code in the context of the target process.
The information that describes the process virtual address space, called page tables, is described in the section on address translation. Each process has its own set of page tables. They are stored in kernel-mode-only accessible pages so that user-mode threads in a process cannot modify their own address space layout.
Session space contains information that is common to each session. (For a description of sessions, see Chapter 2 in Part 1.) A session consists of the processes and other system objects (such as the window station, desktops, and windows) that represent a single user’s logon session. Each session has a session-specific paged pool area used by the kernel-mode portion of the Windows subsystem (Win32k.sys) to allocate session-private GUI data structures. In addition, each session has its own copy of the Windows subsystem process (Csrss.exe) and logon process (Winlogon.exe). The session manager process (Smss.exe) is responsible for creating new sessions, which includes loading a session-private copy of Win32k.sys, creating the session-private object manager namespace, and creating the session-specific instances of the Csrss and Winlogon processes. To virtualize sessions, all sessionwide data structures are mapped into a region of system space called session space. When a process is created, this range of addresses is mapped to the pages associated with the session that the process belongs to.
Finally, system space contains global operating system code and data structures visible by kernel-mode code regardless of which process is currently executing. System space consists of the following components:
System code Contains the operating system image, HAL, and device drivers used to boot the system.
Nonpaged pool Nonpageable system memory heap.
System cache Virtual address space used to map files open in the system cache. (See Chapter 11 for detailed information.)
System page table entries (PTEs) Pool of system PTEs used to map system pages such as I/O space, kernel stacks, and memory descriptor lists. You can see how many system PTEs are available by examining the value of the Memory: Free System Page Table Entries counter in Performance Monitor.
System working set lists The working set list data structures that describe the three system working sets (the system cache working set, the paged pool working set, and the system PTEs working set).
System mapped views Used to map Win32k.sys, the loadable kernel-mode part of the Windows subsystem, as well as kernel-mode graphics drivers it uses. (See Chapter 2 in Part 1 for more information on Win32k.sys.)
Hyperspace A special region used to map the process working set list and other per-process data that doesn’t need to be accessible in arbitrary process context. Hyperspace is also used to temporarily map physical pages into the system space. One example of this is invalidating page table entries in page tables of processes other than the current one (such as when a page is removed from the standby list).
Crash dump information Reserved to record information about the state of a system crash.
HAL usage System memory reserved for HAL-specific structures.
Now that we’ve described the basic components of the virtual address space in Windows, let’s examine the specific layout on the x86, IA64, and x64 platforms.
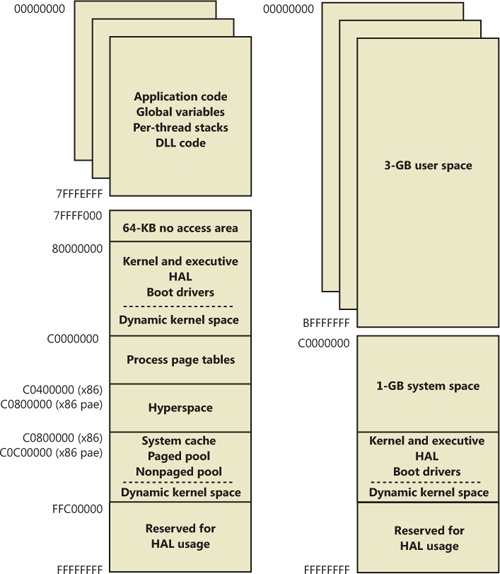
By default, each user process on 32-bit versions of Windows has a 2-GB private address space; the operating system takes the remaining 2 GB. However, the system can be configured with the increase-userva BCD boot option to permit user address spaces up to 3 GB. Two possible address space layouts are shown in Figure 10-8.
The ability for a 32-bit process to grow beyond 2 GB was added to accommodate the need for 32-bit applications to keep more data in memory than could be done with a 2-GB address space. Of course, 64-bit systems provide a much larger address space.
For a process to grow beyond 2 GB of address space, the image file must have the IMAGE_FILE_LARGE_ADDRESS_AWARE flag set in the image header. Otherwise, Windows reserves the additional address space for that process so that the application won’t see virtual addresses greater than 0x7FFFFFFF. Access to the additional virtual memory is opt-in because some applications have assumed that they’d be given at most 2 GB of the address space. Since the high bit of a pointer referencing an address below 2 GB is always zero, these applications would use the high bit in their pointers as a flag for their own data, clearing it, of course, before referencing the data. If they ran with a 3-GB address space, they would inadvertently truncate pointers that have values greater than 2 GB, causing program errors, including possible data corruption. You set this flag by specifying the linker flag /LARGEADDRESSAWARE when building the executable. This flag has no effect when running the application on a system with a 2-GB user address space.
Several system images are marked as large address space aware so that they can take advantage of systems running with large process address spaces. These include:
Finally, because memory allocations using VirtualAlloc, VirtualAllocEx, and VirtualAllocExNuma start with low virtual addresses and grow higher by default, unless a process allocates a lot of virtual memory or it has a very fragmented virtual address space, it will never get back very high virtual addresses. Therefore, for testing purposes, you can force memory allocations to start from high addresses by using the MEM_TOP_DOWN flag or by adding a DWORD registry value, HKLM\SYSTEM\CurrentControlSet\Control\Session Manager\Memory Management\AllocationPreference, and setting it to 0x100000.
Figure 10-9 shows two screen shots of the TestLimit utility (shown in previous experiments) leaking memory on a 32-bit Windows machine booted with and without the increaseuserva option set to 3 GB.
Note that in the second screen shot, TestLimit was able to leak almost 3 GB, as expected. This is only possible because TestLimit was linked with /LARGEADDRESSAWARE. Had it not been, the results would have been essentially the same as on the system booted without increaseuserva.

The 32-bit versions of Windows implement a dynamic system address space layout by using a virtual address allocator (we’ll describe this functionality later in this section). There are still a few specifically reserved areas, as shown in Figure 10-8. However, many kernel-mode structures use dynamic address space allocation. These structures are therefore not necessarily virtually contiguous with themselves. Each can easily exist in several disjointed pieces in various areas of system address space. The uses of system address space that are allocated in this way include:
For systems with multiple sessions, the code and data unique to each session are mapped into system address space but shared by the processes in that session. Figure 10-10 shows the general layout of session space.

The sizes of the components of session space, just like the rest of kernel system address space, are dynamically configured and resized by the memory manager on demand.
System page table entries (PTEs) are used to dynamically map system pages such as I/O space, kernel stacks, and the mapping for memory descriptor lists. System PTEs aren’t an infinite resource. On 32-bit Windows, the number of available system PTEs is such that the system can theoretically describe 2 GB of contiguous system virtual address space. On 64-bit Windows, system PTEs can describe up to 128 GB of contiguous virtual address space.
The theoretical 64-bit virtual address space is 16 exabytes (18,446,744,073,709,551,616 bytes, or approximately 18.44 billion billion bytes). Unlike on x86 systems, where the default address space is divided in two parts (half for a process and half for the system), the 64-bit address is divided into a number of different size regions whose components match conceptually the portions of user, system, and session space. The various sizes of these regions, listed in Table 10-8, represent current implementation limits that could easily be extended in future releases. Clearly, 64 bits provides a tremendous leap in terms of address space sizes.
Table 10-8. 64-Bit Address Space Sizes
Region | IA64 | x64 |
|---|---|---|
Process Address Space | 7,152 GB | 8,192 GB |
System PTE Space | 128 GB | 128 GB |
System Cache | 1 TB | 1 TB |
Paged Pool | 128 GB | 128 GB |
Nonpaged Pool | 75% of physical memory | 75% of physical memory |
Also, on 64-bit Windows, another useful feature of having an image that is large address space aware is that while running on 64-bit Windows (under Wow64), such an image will actually receive all 4 GB of user address space available—after all, if the image can support 3-GB pointers, 4-GB pointers should not be any different, because unlike the switch from 2 GB to 3 GB, there are no additional bits involved. Figure 10-11 shows TestLimit, running as a 32-bit application, reserving address space on a 64-bit Windows machine, followed by the 64-bit version of TestLimit leaking memory on the same machine.

Note that these results depend on the two versions of TestLimit having been linked with the /LARGEADDRESSAWARE option. Had they not been, the results would have been about 2 GB for each. 64-bit applications linked without /LARGEADDRESSAWARE are constrained to the first 2 GB of the process virtual address space, just like 32-bit applications.
The detailed IA64 and x64 address space layouts vary slightly. The IA64 address space layout is shown in Figure 10-12, and the x64 address space layout is shown in Figure 10-13.


As discussed previously, 64 bits of virtual address space allow for a possible maximum of 16 exabytes (EB) of virtual memory, a notable improvement over the 4 GB offered by 32-bit addressing. With such a copious amount of memory, it is obvious that today’s computers, as well as tomorrow’s foreseeable machines, are not even close to requiring support for that much memory.
Accordingly, to simplify chip architecture and avoid unnecessary overhead, particularly in address translation (to be described later), AMD’s and Intel’s current x64 processors implement only 256 TB of virtual address space. That is, only the low-order 48 bits of a 64-bit virtual address are implemented. However, virtual addresses are still 64 bits wide, occupying 8 bytes in registers or when stored in memory. The high-order 16 bits (bits 48 through 63) must be set to the same value as the highest order implemented bit (bit 47), in a manner similar to sign extension in two’s complement arithmetic. An address that conforms to this rule is said to be a “canonical” address.
Under these rules, the bottom half of the address space thus starts at 0x0000000000000000, as expected, but it ends at 0x00007FFFFFFFFFFF. The top half of the address space starts at 0xFFFF800000000000 and ends at 0xFFFFFFFFFFFFFFFF. Each “canonical” portion is 128 TB. As newer processors implement more of the address bits, the lower half of memory will expand upward, toward 0x7FFFFFFFFFFFFFFF, while the upper half of memory will expand downward, toward 0x8000000000000000 (a similar split to today’s memory space but with 32 more bits).
Windows on x64 has a further limitation: of the 256 TB of virtual address space available on x64 processors, Windows at present allows only the use of a little more than 16 TB. This is split into two 8-TB regions, the user mode, per-process region starting at 0 and working toward higher addresses (ending at 0x000007FFFFFFFFFF), and a kernel-mode, systemwide region starting at “all Fs” and working toward lower addresses, ending at 0xFFFFF80000000000 for most purposes. This section describes the origin of this 16-TB limit.
A number of Windows mechanisms have made, and continue to make, assumptions about usable bits in addresses. Pushlocks, fast references, Patchguard DPC contexts, and singly linked lists are common examples of data structures that use bits within a pointer for nonaddressing purposes. Singly linked lists, combined with the lack of a CPU instruction in the original x64 CPUs required to “port” the data structure to 64-bit Windows, are responsible for this memory addressing limit on Windows for x64.
Here is the SLIST_HEADER, the data structure Windows uses to represent an entry inside a list:
typedef union _SLIST_HEADER {
ULONGLONG Alignment;
struct {
SLIST_ENTRY Next;
USHORT Depth;
USHORT Sequence;
} DUMMYSTRUCTNAME;
} SLIST_HEADER, *PSLIST_HEADER;Note that this is an 8-byte structure, guaranteed to be aligned as such, composed of three elements: the pointer to the next entry (32 bits, or 4 bytes) and depth and sequence numbers, each 16 bits (or 2 bytes). To create lock-free push and pop operations, the implementation makes use of an instruction present on Pentium processors or higher—CMPXCHG8B (Compare and Exchange 8 bytes), which allows the atomic modification of 8 bytes of data. By using this native CPU instruction, which also supports the LOCK prefix (guaranteeing atomicity on a multiprocessor system), the need for a spinlock to combine two 32-bit accesses is eliminated, and all operations on the list become lock free (increasing speed and scalability).
On 64-bit computers, addresses are 64 bits, so the pointer to the next entry should logically be 64 bits. If the depth and sequence numbers remain within the same parameters, the system must provide a way to modify at minimum 64+32 bits of data—or better yet, 128 bits, in order to increase the entropy of the depth and sequence numbers. However, the first x64 processors did not implement the essential CMPXCHG16B instruction to allow this. The implementation, therefore, was written to pack as much information as possible into only 64 bits, which was the most that could be modified atomically at once. The 64-bit SLIST_HEADER thus looks like this:
struct { // 8-byte header
ULONGLONG Depth:16;
ULONGLONG Sequence:9;
ULONGLONG NextEntry:39;
} Header8;The first change is the reduction of the space for the sequence number to 9 bits instead of 16 bits, reducing the maximum sequence number the list can achieve. This leaves only 39 bits for the pointer, still far from 64 bits. However, by forcing the structure to be 16-byte aligned when allocated, 4 more bits can be used because the bottom bits can now always be assumed to be 0. This gives 43 bits for addresses, but there is one more assumption that can be made. Because the implementation of linked lists is used either in kernel mode or user mode but cannot be used across address spaces, the top bit can be ignored, just as on 32-bit machines. The code will assume the address to be kernel mode if called in kernel mode and vice versa. This allows us to address up to 44 bits of memory in the NextEntry pointer and is the defining constraint of the addressing limit in Windows.
Forty-four bits is a much better number than 32. It allows 16 TB of virtual memory to be described and thus splits Windows into two even chunks of 8 TB for user-mode and kernel-mode memory. Nevertheless, this is still 16 times smaller than the CPU’s own limit (48 bits is 256 TB), and even farther still from the maximum that 64 bits can describe. So, with scalability in mind, some other bits do exist in the SLIST_HEADER that define the type of header being dealt with. This means that when the day comes when all x64 CPUs support 128-bit Compare and Exchange, Windows can easily take advantage of it (and to do so before then would mean distributing two different kernel images). Here’s a look at the full 8-byte header:
struct { // 8-byte header
ULONGLONG Depth:16;
ULONGLONG Sequence:9;
ULONGLONG NextEntry:39;
ULONGLONG HeaderType:1; // 0: 8-byte; 1: 16-byte
ULONGLONG Init:1; // 0: uninitialized; 1: initialized
ULONGLONG Reserved:59;
ULONGLONG Region:3;
} Header8;Note how the HeaderType bit is overlaid with the Depth bits and allows the implementation to deal with 16-byte headers whenever support becomes available. For the sake of completeness, here is the definition of the 16-byte header:
struct { // 16-byte header
ULONGLONG Depth:16;
ULONGLONG Sequence:48;
ULONGLONG HeaderType:1; // 0: 8-byte; 1: 16-byte
ULONGLONG Init:1; // 0: uninitialized; 1: initialized
ULONGLONG Reserved:2;
ULONGLONG NextEntry:60; // last 4 bits are always 0's
} Header16;Notice how the NextEntry pointer has now become 60 bits, and because the structure is still 16-byte aligned, with the 4 free bits, leads to the full 64 bits being addressable.
Conversely, kernel-mode data structures that do not involve SLISTs are not limited to the 8-TB address space range. System page table entries, hyperspace, and the cache working set all occupy virtual addresses below 0xFFFFF80000000000 because these structures do not use SLISTs.
Thirty-two-bit versions of Windows manage the system address space through an internal kernel virtual allocator mechanism that we’ll describe in this section. Currently, 64-bit versions of Windows have no need to use the allocator for virtual address space management (and thus bypass the cost), because each region is statically defined as shown in Table 10-8 earlier.
When the system initializes, the MiInitializeDynamicVa function sets up the basic dynamic ranges (the ranges currently supported are described in Table 10-9) and sets the available virtual address to all available kernel space. It then initializes the address space ranges for boot loader images, process space (hyperspace), and the HAL through the MiIntializeSystemVaRange function, which is used to set hard-coded address ranges. Later, when nonpaged pool is initialized, this function is used again to reserve the virtual address ranges for it. Finally, whenever a driver loads, the address range is relabeled to a driver image range (instead of a boot loaded range).
After this point, the rest of the system virtual address space can be dynamically requested and released through MiObtainSystemVa (and its analogous MiObtainSessionVa) and MiReturnSystemVa. Operations such as expanding the system cache, the system PTEs, nonpaged pool, paged pool, and/or special pool; mapping memory with large pages; creating the PFN database; and creating a new session all result in dynamic virtual address allocations for a specific range. Each time the kernel virtual address space allocator obtains virtual memory ranges for use by a certain type of virtual address, it updates the MiSystemVaType array, which contains the virtual address type for the newly allocated range. The values that can appear in MiSystemVaType are shown in Table 10-9.
Table 10-9. System Virtual Address Types
Region | Description | Limitable |
|---|---|---|
MiVaSessionSpace (0x1) | Addresses for session space | Yes |
MiVaProcessSpace (0x2) | Addresses for process address space | No |
MiVaBootLoaded (0x3) | No | |
MiVaPfnDatabase (0x4) | Addresses for the PFN database | No |
MiVaNonPagedPool (0x5) | Addresses for the nonpaged pool | Yes |
MiVaPagedPool (0x6) | Addresses for the paged pool | Yes |
MiVaSpecialPool (0x7) | Addresses for the special pool | No |
MiVaSystemCache (0x8) | Addresses for the system cache | Yes |
MiVaSystemPtes (0x9) | Addresses for system PTEs | Yes |
MiVaHal (0xA) | Addresses for the HAL | No |
MiVaSessionGlobalSpace (0xB) | Addresses for session global space | No |
MiVaDriverImages (0xC) | No |
Although the ability to dynamically reserve virtual address space on demand allows better management of virtual memory, it would be useless without the ability to free this memory. As such, when paged pool or the system cache can be shrunk, or when special pool and large page mappings are freed, the associated virtual address is freed. (Another case is when the boot registry is released.) This allows dynamic management of memory depending on each component’s use. Additionally, components can reclaim memory through MiReclaimSystemVa, which requests virtual addresses associated with the system cache to be flushed out (through the dereference segment thread) if available virtual address space has dropped below 128 MB. (Reclaiming can also be satisfied if initial nonpaged pool has been freed.)
In addition to better proportioning and better management of virtual addresses dedicated to different kernel memory consumers, the dynamic virtual address allocator also has advantages when it comes to memory footprint reduction. Instead of having to manually preallocate static page table entries and page tables, paging-related structures are allocated on demand. On both 32-bit and 64-bit systems, this reduces boot-time memory usage because unused addresses won’t have their page tables allocated. It also means that on 64-bit systems, the large address space regions that are reserved don’t need to have their page tables mapped in memory, which allows them to have arbitrarily large limits, especially on systems that have little physical RAM to back the resulting paging structures.
Theoretically, the different virtual address ranges assigned to components can grow arbitrarily in size as long as enough system virtual address space is available. In practice, on 32-bit systems, the kernel allocator implements the ability to set limits on each virtual address type for the purposes of both reliability and stability. (On 64-bit systems, kernel address space exhaustion is currently not a concern.) Although no limits are imposed by default, system administrators can use the registry to modify these limits for the virtual address types that are currently marked as limitable (see Table 10-9).
If the current request during the MiObtainSystemVa call exceeds the available limit, a failure is marked (see the previous experiment) and a reclaim operation is requested regardless of available memory. This should help alleviate memory load and might allow the virtual address allocation to work during the next attempt. (Recall, however, that reclaiming affects only system cache and nonpaged pool).
The system virtual address space limits described in the previous section allow for limiting systemwide virtual address space usage of certain kernel components, but they work only on 32-bit systems when applied to the system as a whole. To address more specific quota requirements that system administrators might have, the memory manager also collaborates with the process manager to enforce either systemwide or user-specific quotas for each process.
The PagedPoolQuota, NonPagedPoolQuota, PagingFileQuota, and WorkingSetPagesQuota values in the HKLM\SYSTEM\CurrentControlSet\Control\Session Manager\Memory Management key can be configured to specify how much memory of each type a given process can use. This information is read at initialization, and the default system quota block is generated and then assigned to all system processes (user processes will get a copy of the default system quota block unless per-user quotas have been configured as explained next).
To enable per-user quotas, subkeys under the registry key HKLM\SYSTEM\CurrentControlSet\Session Manager\Quota System can be created, each one representing a given user SID. The values mentioned previously can then be created under this specific SID subkey, enforcing the limits only for the processes created by that user. Table 10-10 shows how to configure these values, which can be configured at run time or not, and which privileges are required.
Table 10-10. Process Quota Types
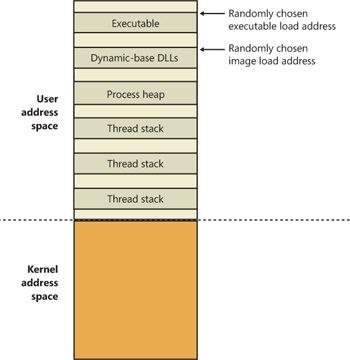
Just as address space in the kernel is dynamic, the user address space is also built dynamically—the addresses of the thread stacks, process heaps, and loaded images (such as DLLs and an application’s executable) are dynamically computed (if the application and its images support it) through a mechanism known as Address Space Layout Randomization, or ASLR.
At the operating system level, user address space is divided into a few well-defined regions of memory, shown in Figure 10-14. The executable and DLLs themselves are present as memory mapped image files, followed by the heap(s) of the process and the stack(s) of its thread(s). Apart from these regions (and some reserved system structures such as the TEBs and PEB), all other memory allocations are run-time dependent and generated. ASLR is involved with the location of all these run-time-dependent regions and, combined with DEP, provides a mechanism for making remote exploitation of a system through memory manipulation harder to achieve. Since Windows code and data are placed at dynamic locations, an attacker cannot typically hardcode a meaningful offset into either a program or a system-supplied DLL.
EXPERIMENT: Analyzing User Virtual Address Space
The VMMap utility from Sysinternals can show you a detailed view of the virtual memory being utilized by any process on your machine, divided into categories for each type of allocation, summarized as follows:
Image Displays memory allocations used to map the executable and its dependencies (such as dynamic libraries) and any other memory mapped image (portable executable format) files
Private Displays memory allocations marked as private, such as internal data structures, other than the stack and heap
Shareable Displays memory allocations marked as shareable, typically including shared memory (but not memory mapped files, which are either Image or Mapped File)
Mapped File Displays memory allocations for memory mapped data files
Heap Displays memory allocated for the heap(s) that this process owns
Stack Displays memory allocated for the stack of each thread in this process
System Displays kernel memory allocated for the process (such as the process object)
The following screen shot shows a typical view of Explorer as seen through VMMap.

Depending on the type of memory allocation, VMMap can show additional information, such as file names (for mapped files), heap IDs (for heap allocations), and thread IDs (for stack allocations). Furthermore, each allocation’s cost is shown both in committed memory and working set memory. The size and protection of each allocation is also displayed.
ASLR begins at the image level, with the executable for the process and its dependent DLLs. Any image file that has specified ASLR support in its PE header (IMAGE_DLL_CHARACTERISTICS_DYNAMIC_BASE), typically specified by using the /DYNAMICBASE linker flag in Microsoft Visual Studio, and contains a relocation section will be processed by ASLR. When such an image is found, the system selects an image offset valid globally for the current boot. This offset is selected from a bucket of 256 values, all of which are 64-KB aligned.
For executables, the load offset is calculated by computing a delta value each time an executable is loaded. This value is a pseudo-random 8-bit number from 0x10000 to 0xFE0000, calculated by taking the current processor’s time stamp counter (TSC), shifting it by four places, and then performing a division modulo 254 and adding 1. This number is then multiplied by the allocation granularity of 64 KB discussed earlier. By adding 1, the memory manager ensures that the value can never be 0, so executables will never load at the address in the PE header if ASLR is being used. This delta is then added to the executable’s preferred load address, creating one of 256 possible locations within 16 MB of the image address in the PE header.
For DLLs, computing the load offset begins with a per-boot, systemwide value called the image bias, which is computed by MiInitializeRelocations and stored in MiImageBias. This value corresponds to the time stamp counter (TSC) of the current CPU when this function was called during the boot cycle, shifted and masked into an 8-bit value, which provides 256 possible values. Unlike executables, this value is computed only once per boot and shared across the system to allow DLLs to remain shared in physical memory and relocated only once. If DLLs were remapped at different locations inside different processes, the code could not be shared. The loader would have to fix up address references differently for each process, thus turning what had been shareable read-only code into process-private data. Each process using a given DLL would have to have its own private copy of the DLL in physical memory.
Once the offset is computed, the memory manager initializes a bitmap called the MiImageBitMap. This bitmap is used to represent ranges from 0x50000000 to 0x78000000 (stored in MiImageBitMapHighVa), and each bit represents one unit of allocation (64 KB, as mentioned earlier). Whenever the memory manager loads a DLL, the appropriate bit is set to mark its location in the system; when the same DLL is loaded again, the memory manager shares its section object with the already relocated information.
As each DLL is loaded, the system scans the bitmap from top to bottom for free bits. The MiImageBias value computed earlier is used as a start index from the top to randomize the load across different boots as suggested. Because the bitmap will be entirely empty when the first DLL (which is always Ntdll.dll) is loaded, its load address can easily be calculated: 0x78000000 – MiImageBias * 0x10000. Each subsequent DLL will then load in a 64-KB chunk below. Because of this, if the address of Ntdll.dll is known, the addresses of other DLLs could easily be computed. To mitigate this possibility, the order in which known DLLs are mapped by the Session Manager during initialization is also randomized when Smss loads.
Finally, if no free space is available in the bitmap (which would mean that most of the region defined for ASLR is in use, the DLL relocation code defaults back to the executable case, loading the DLL at a 64-KB chunk within 16 MB of its preferred base address.
The next step in ASLR is to randomize the location of the initial thread’s stack (and, subsequently, of each new thread). This randomization is enabled unless the flag StackRandomizationDisabled was enabled for the process and consists of first selecting one of 32 possible stack locations separated by either 64 KB or 256 KB. This base address is selected by finding the first appropriate free memory region and then choosing the xth available region, where x is once again generated based on the current processor’s TSC shifted and masked into a 5-bit value (which allows for 32 possible locations).
Once this base address has been selected, a new TSC-derived value is calculated, this one 9 bits long. The value is then multiplied by 4 to maintain alignment, which means it can be as large as 2,048 bytes (half a page). It is added to the base address to obtain the final stack base.
Finally, ASLR randomizes the location of the initial process heap (and subsequent heaps) when created in user mode. The RtlCreateHeap function uses another pseudo-random, TSC-derived value to determine the base address of the heap. This value, 5 bits this time, is multiplied by 64 KB to generate the final base address, starting at 0, giving a possible range of 0x00000000 to 0x001F0000 for the initial heap. Additionally, the range before the heap base address is manually deallocated in an attempt to force an access violation if an attack is doing a brute-force sweep of the entire possible heap address range.
ASLR is also active in kernel address space. There are 64 possible load addresses for 32-bit drivers and 256 for 64-bit drivers. Relocating user-space images requires a significant amount of work area in kernel space, but if kernel space is tight, ASLR can use the user-mode address space of the System process for this work area.
As we’ve seen, ASLR and many of the other security mitigations in Windows are optional because of their potential compatibility effects: ASLR applies only to images with the IMAGE_DLL_CHARACTERISTICS_DYNAMIC_BASE bit in their image headers, hardware no-execute (data execution protection) can be controlled by a combination of boot options and linker options, and so on. To allow both enterprise customers and individual users more visibility and control of these features, Microsoft publishes the Enhanced Mitigation Experience Toolkit (EMET). EMET offers centralized control of the mitigations built into Windows and also adds several more mitigations not yet part of the Windows product. Additionally, EMET provides notification capabilities through the Event Log to let administrators know when certain software has experienced access faults because mitigations have been applied. Finally, EMET also enables manual opt-out for certain applications that might exhibit compatibility issues in certain environments, even though they were opted in by the developer.
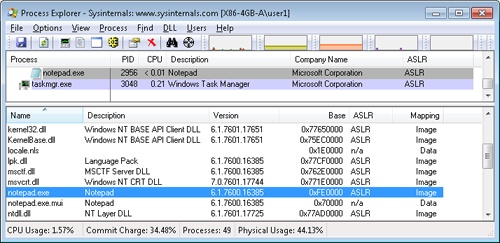
EXPERIMENT: Looking at ASLR Protection on Processes
You can use Process Explorer from Sysinternals to look over your processes (and, just as important, the DLLs they load) to see if they support ASLR. Note that even if just one DLL loaded by a process does not support ASLR, it can make the process much more vulnerable to attacks.
To look at the ASLR status for processes, right-click on any column in the process tree, choose Select Columns, and then check ASLR Enabled on the Process Image tab. Notice that not all in-box Windows programs and services are running with ASLR enabled, and there is one visible example of a third-party application that does not have ASLR enabled either.
In the example, we have highlighted the Notepad.exe process. In this case, its load address is 0xFE0000. If you were to close all instances of Notepad and then start another, you would find it at a different load address. If you shut down and reboot the system and then try the experiment again, you would find that the ASLR-enabled DLLs are at different load addresses after each boot.