2. Systematic conservation planning
3. Data for conservation planning
4. Methods for the selection of conservation areas
5. Representation or persistence? Dynamics and uncertainty
6. Global conservation planning
7. The future of conservation planning: Research challenges
The future of biodiversity depends critically on effective systems of conservation areas. The science underpinning the design and implementation of these systems has benefited from advances in ecology, data acquisition, and computational methods. Future success requires innovation on issues such as scale, the dynamic nature of threats and opportunities, and socioeconomic factors.
algorithm. Sequence of defined steps to achieve a result, defined by humans but often solved by computers, especially for complex conservation planning problems
conservation area. Place where action is taken to promote the persistence of biodiversity
irreplaceability. Property of a site measuring the likelihood that its protection will be required for a system of conservation areas to meet all targets or to otherwise optimize a conservation objective function
objective function. Mathematical statement of quantities to be maximized (e.g., the number of species or other biodiversity elements meeting targets) or minimized (e.g., cost)
persistence. Sustained existence of species or other elements of biodiversity both within and outside of conservation areas; as a conservation target, generally preferable to representation
representation. Sampling of biodiversity pattern, such as a number of species occurrences, within the boundaries of conservation areas; contrast with persistence
systematic conservation planning. The process of identifying and implementing systems of complementary conservation areas that together achieve explicit, quantifiable targets for the conservation of biological diversity
target. Explicit, quantifiable outcome desired for each species or other biodiversity element of interest
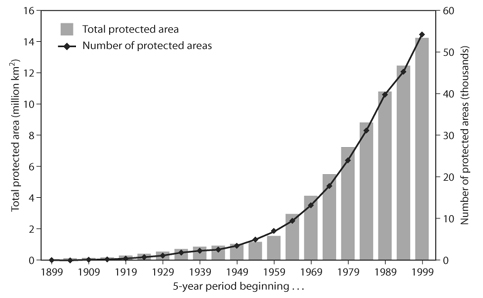
The fraction of Earth’s surface protected in conservation areas increased dramatically in the twentieth century with more than 10% of terrestrial area now under some form of protection (Chape et al., 2005). This effort could not come at a more important time: biodiversity worldwide is in jeopardy, with current species extinction rates estimated to be at least 100–1000 times higher than in prehuman times. Yet the extent of protected areas alone gives an incomplete picture. Too often these areas have been chosen on the basis of high scenic value or political expediency rather than the persistence of biological diversity. This tendency is evident in the widespread occurrence of areas ostensibly for biodiversity conservation in locations that are poorly drained, arid, remote, steep, or otherwise undesirable for homes, farms, resource extraction, and other human uses. This approach might sound like a “win–win” solution for people and other species. Yet it leaves the species most likely to become extinct— those most subject to human pressures—inadequately protected. The decline of biodiversity and the irreversible loss of conservation opportunities therefore continue even as reserve systems expand. In a seminal 2004 analysis, Ana Rodrigues and co-workers analyzed the global set of protected areas (figure 1) and found that at least 1400 terrestrial vertebrate species were not included in any protected areas, with many others underprotected. These shortfalls are likely even greater in marine and freshwater biomes, which face severe threats but have received less conservation attention in comparison. In all biomes, failure to incorporate data on biodiversity and current threats in the selection of conservation areas has limited their effectiveness.
Multiple theoretical and practical challenges must be overcome to avoid the continuing loss of biological diversity and to improve on the shortcomings of past conservation approaches. Biodiversity, threats to it, and costs of conservation are unevenly distributed at all spatial scales, from local parcels and watersheds to nations and worldwide biomes. Moreover, conservation resources are limited, so it is essential that the best decisions be made with what resources we have. Systems of conservation areas must be built and implemented in a systematic way to ensure the efficiency and success of efforts to secure biodiversity.
Conservation areas—places where action is undertaken to promote the persistence of biodiversity—are the cornerstone of conservation strategies. Successful strategies must account for the relationships among areas to create systems—not simple collections—of conservation areas. Conservation areas interact with one another across space through ecological processes such as animal movements, hydrological flows, and seed dispersal. Moreover, the usefulness of any one conservation area depends not on its ability to meet conservation targets on its own but on the extent to which it complements other conservation areas by improving the whole system’s ability to meet targets.
How do we create effective systems of conservation areas? As with any question in science, we must first define the problem. In this case, the task is to plan systems of conservation areas to achieve a set of specified biodiversity objectives, subject to limited budgets, limited data, limited time, and constraints imposed by alternative—often conflicting—human uses for potential conservation areas.
Systematic conservation planning is the process of identifying and implementing systems of complementary conservation areas that together achieve explicit, quantifiable targets for the conservation of biological diversity. This process often applies computational methods, based on ecological and optimization principles, to extract maximum use from available data on species distributions and other key factors. Although the data, expertise, and computational and other resources used in systematic conservation planning cost money, nonsystematic approaches such as opportunism result in failure to meet conservation targets and lead to unnecessary loss of biodiversity—a cost even more difficult to bear.
Figure 1. The number and area of protected areas (here, terrestrial protected areas) have increased dramatically worldwide. Based on data from the 2004 World Database on Protected Areas. (From Dobson, A. P., W. R. Turner, and D. S. Wilcove. 2007. Conservation biology: Unsolved problems and their policy implications. In R. M. May and A. McLean, eds. Theoretical Ecology. Oxford: Oxford University Press, 172–189)
Although conservation challenges are formidable, recent decades have seen considerable achievements in the development of more effective conservation strategies. In the remainder of this chapter, we discuss basic principles and recent advances in collecting and using data, applying systematic approaches for solving complex planning problems, dealing with the many uncertainties of real-world decisionmaking, and planning for conservation at multiple spatial scales. We conclude by examining key challenges for the future of conservation planning.
At a minimum, conservation planning requires basic biodiversity data, some of which can be downloaded for free from the Web, quantitative conservation targets, and planning units. More sophisticated—and more effective—approaches also consider ecological and evolutionary processes, socioeconomic factors, diverse stakeholders, and the interplay of natural and human-caused dynamics to create conservation outcomes over time and space.
All conservation planning requires biodiversity data, and the most basic forms of these data tell planners about the biodiversity pattern. Pattern refers to the distribution of biodiversity as a snapshot. Examples are maps of landscapes and vegetation types, locality records and range maps of species, predicted species distributions based on known habitat relationships, and “special elements” such as roosting and breeding sites. An important issue is that biodiversity is enormously complex, including all the species on the planet and their interactions with one another and their physical environments. Planners almost always have a very incomplete picture of this complexity and cannot wait for the whole picture to be filled in. That means that they rely on biodiversity “surrogates.” Planners have to assume that protecting known species will also protect many unknown ones. They often assume also that protecting examples of vegetation types and other habitat classifications will protect many unknown species, partly by chance and partly because maps of habitats delineate environmental variation known to be important in shaping the distributions of many species. How valid are these assumptions? Tests of the effectiveness of biodiversity surrogates have produced mixed results. One general finding seems to be that rarer species are more likely to be missed by protected areas based on surrogates. This makes sense intuitively but provides little comfort because these are the species most in need of protection. Still, because data on most of biodiversity are lacking, planners have little choice but to use the best available information on known species and to use their judgment about the value of other surrogates in guiding decisions on protected areas.
Biodiversity is more than a snapshot, of course. If planners succeed only in sampling a biodiversity pattern, species will be lost from conservation areas. The reasons concern the many processes that maintain and generate biodiversity. Examples of biodiversity processes are the birth, death, and movement of individuals, the dynamics of metapopulations as species disappear from patches and recolonize them, spatiotemporal dynamics of disturbances such as fire and floods, dynamics of resources such as rainfall in deserts and upwellings of nutrient-rich water in the sea, migrations of animals, adjustment of behaviors and distributions to changing climate, and continuing evolution. If these processes stop, new species will no longer develop from existing ones, and existing species will disappear, even from conservation areas. Among the planning approaches that promote the persistence of biodiversity processes is the design or configuration of conservation areas (see chapters V.1, V.2, and V.3). Design refers to characteristics of individual conservation areas and whole conservation systems, including size, shape, directional alignment, replication, spacing, and connectivity. Many processes, such as the population dynamics of area-demanding species and regimes of disturbance (e.g., fire and postfire succession) are unlikely to persist in single conservation areas unless these areas are very large and carefully configured. More often, extensive processes can be maintained only across systems of conservation areas. Ideally, conservation planners will know enough about processes to design conservation systems accordingly. In practice, biodiversity processes, like species, are so numerous and complex that planners understand only a few of them well enough to influence conservation design. What about the others? Like unknown species, planners hope that many unknown processes will be catered to by surrogates, in this case design surrogates. Examples are rules of thumb such as these: conservation areas should be as large and well connected as possible to facilitate persistence of species and management activities; and conservation areas should be aligned along steep climatic gradients to facilitate adjustment of species distributions to climate change.
Systematic conservation planning also requires quantitative conservation objectives, most commonly expressed as targets. Targets have been mainly formulated for elements of biodiversity pattern. For example, a conservation agency might set a goal to conserve 2000 ha of vegetation type A, 10 locality records of rare species B, and 35% of the high-quality habitat of large mammal X. How do planners decide what these targets should be? Broadly speaking, targets should be the best possible interpretations of how much protection is required by a species or other biodiversity element. This means that targets will vary among species, for example, depending on how rare and how threatened they are. Targets will vary among habitat types depending on threat status, quantity, and needs of associated species, and whether some are important, for example, as critical resources during dry seasons. Targets are always limited by available data and incomplete understanding of conservation requirements. They are important, though, because they allow planners to decide how adequate existing conservation areas are, how extensive new conservation areas should be, and how important each potential new conservation area is. Ideally, conservation targets should also be based on the requirements of biodiversity processes. What would these be like? One example might be a target for the “effective area” of a species, taking into account its habitat requirements and the size, shape, and dispersion of habitat fragments, along with edge effects (see chapter V.3). Another example might concern the extent of both upland (summer) habitat and lowland (winter) habitat of a migratory species and effective connections between them. Yet another might be the minimum size of conservation areas necessary to retain recolonization sources after fires.
Planning units are the building blocks of an expanded system of conservation areas, and choices regarding planning units affect conservation planning in multiple ways. Cadastral units that reflect the boundaries of existing ownership or management correspond most directly to data on cost, availability, and management history and generally represent the actual units that will be involved in acquisition or other conservation actions. However, cadastral boundaries might not be available or may be too numerous (e.g., in a large planning region) to analyze conveniently, or many of them might be smaller than the resolution of some biodiversity data. Biophysical units, such as habitat patches or watersheds, align more closely with biodiversity pattern and the ecological processes (e.g., movement corridors, hydrological flows) that maintain biodiversity. Alternatively, regular grids overlaid on the study area have the advantage of being comparatively easy to create and manipulate and can be created in areas lacking cadastral or biophysical data. Both rectangular and hexagonal grids are used in conservation planning, although hexagons might be more useful when connectivity among units is a consideration, and properly constructed discrete hexagon grids are better suited to cover broad geographic areas (continental to global) without geometric distortion. The size of units matters as well. Analyses based on smaller units can generally meet targets more efficiently but often lead to less-connected sets of conservation areas if connectivity is not explicitly accounted for. Whatever size is used, targets must be specified correctly (e.g., the simplistic “protect each species at a single site” will produce wildly different results with units of different sizes), and biodiversity and other data must be available for the configuration and resolution of the planning units used. There is no one-size-fits-all choice for planning units. The best decision will vary among regions and scales, depending on such factors as the availability of cadastral data, resolution of biodiversity data, size of the region, and whether the planning exercise is likely to be interactive (requiring rapid analysis) or automated.
Beyond these minimum requirements are other kinds of data that can help planners to make effective decisions by reducing conflicts and maximizing opportunities for conservation management. Some of these data types are described below. Each type informs the planning process in a different and useful way.
Conservation actions are limited by conservation funding. Where there are options for achieving targets, selecting areas that are less expensive to protect and manage will allow scarce funds to go toward achieving additional targets elsewhere. Timing is key: it is much more efficient to consider costs at the time when systems are being designed. In the past, because of methodological and data limitations, many studies assumed that all sites have equal cost, regardless of land value or site size. However, most computational methods for conservation planning can now incorporate cost. Although the use of area or another crude surrogate can improve results somewhat where cost data are unavailable, studies have demonstrated the central importance of spatially explicit cost data to conservation planning.
Effective conservation requires more than merely buying real estate; and so the most effective conservation planning will require more than just data on land value. Additional factors, including transaction, management, and research costs, can in some cases exceed land values alone. Researchers are just beginning to confront and overcome the complexities associated with these additional costs. For example, the costs and benefits of conservation accrue differently to different people and across different spatial scales. The modeling and valuation of costs and benefits of conservation are areas ripe for future study.
Fundamentally, conservation planning is about locating management actions to separate elements of biodiversity from processes that threaten their persistence. Conservation areas can be useful in reducing threats such as those from agriculture, grazing, logging, and mining. They can also facilitate the management of invasive species and mitigation of changes to fire or other critical disturbance regimes. Information on threats can improve the planning of conservation areas in three important ways. First, information on the conservation status of an element of interest (e.g., species’ global status from the IUCN Red List of Threatened Species) can aid in establishing targets, with larger targets (or larger targets in proportion to species’ ranges or other measures) being assigned to those elements at greatest risk of extinction or extirpation. Second, spatially explicit data on the distribution of threats can inform the siting of conservation areas: where spatial options exist to achieve targets, areas that minimize threats are preferable. Third, estimates of the likely future distribution and magnitude of threats can guide the scheduling of conservation actions. For example, earliest conservation action can be given to those areas or species that are most imminently threatened or to those areas that have the greatest chances of retaining their biodiversity over time.
Areas vary in their availability for acquisition or other conservation actions. Even the most carefully crafted conservation plans can fail if the areas selected are not all available in a suitable time frame for the necessary conservation action. Data on the current or future availability of areas (the presence of willing sellers, for one) can influence the effectiveness of conservation planning in various ways. For example, ignoring areas that are less likely to become available may allow planners to focus their data collection and conservation efforts more productively elsewhere. On the other hand, avoiding difficult areas may not always be an option: focusing only on the areas most readily available often ignores those areas most useful for meeting targets. If areas of lower anticipated availability are essential for meeting targets (e.g., as the only known population of a species), an increase in the price offered for acquisition or management access might lead to higher target achievement. At the extreme end, some areas have very limited likelihood of becoming available, including those committed to residences, logging, mining leases, and the like. Sometimes these issues prevent all targets from being reached. In any case, spatially explicit opportunity data can usefully inform the planning process. Even in the absence of such data, methods that approximate site availability can produce better conservation outcomes.
Rarely are systems of conservation areas built from scratch; they are more often constructed through incremental additions to existing networks. For these additions to be effective, they must account for the contributions of established reserves toward conservation targets. Thus, it is usually sensible to begin with spatial data on the boundaries of existing conservation areas and force inclusion of these areas in planning analyses. This has the added advantage of establishing nuclei of conservation management around which enlarged conservation systems can be designed. Not all conservation areas are effective, however, and areas that contribute relatively little toward targets could potentially be “unreserved” for the planning process or even removed from the actual conservation estate. The sale of these ineffective areas could in principle allow more effective conservation elsewhere, although the impact and feasibility (both economic and political) of this have yet to be explored systematically.
Many kinds of data are important for conservation planning; yet all take time and money to obtain. There are risks inherent in proceeding with limited or poor data: the resulting bad decisions can waste scarce resources, compromise targets, and be difficult to undo. However in urgent conservation situations, the consequences of delaying action while waiting for better data can be just as serious. The relative consequences of inaction versus premature action must be assessed and balanced for each particular conservation situation. This is another issue that deserves urgent attention from conservation planners.
Although problems involving two or three possible sites and a dozen or so conservation targets can be solved with pen and paper, effective conservation in most real-world situations requires computer algorithms to identify systems of sites that will achieve the most targets subject to a limited budget. Although these analytical tools are essential for area selection, their application requires judicious consideration of the factors mentioned above and cannot substitute for carefully framing the objective, targets, and factors necessary to be considered in a given conservation situation.
Early algorithms tackled the area-selection problem with stepwise, rule-of-thumb approaches. These included a greedy, richness-based algorithm (e.g., “next, add the site that most increases the number of species represented in the system”) and variants that weighted sites according to relative rarity of species and other factors. Later work framed the question as an optimization problem and used optimization methods such as mathematical programming or simulated annealing to identify optimal sets (e.g., the system of sites that maximizes target achievement). Not surprisingly, optimal formulations outperform a variety of heuristic methods (algorithms whose solutions are not provably optimal) in practice, including various stepwise approaches. These formulations require that a single mathematical objective function be specified, which is then optimized. A variety of factors (different planning units, species-specific area targets, costs, minimization of boundaries so that contiguous areas are preferred, and others) can be included in an objective function, and identification of optimal solutions with mathematical programming remains the preferred method for problems of manageable size. However, additional factors, larger numbers of areas or biodiversity elements, and more complex targets commonly prevent optimization software from attaining optimal solutions; in these cases, simulated annealing or other sophisticated heuristics are useful alternatives.
One concept that has emerged as particularly useful in conservation planning is irreplaceability. Irreplaceability values areas according to the likelihood that their protection will be required for the system to meet all targets or to otherwise maximize the conservation objective function. Values of 1.0 (completely irreplaceable) or close to 1.0 indicate that no or few spatial options exist for meeting conservation targets without the area in question. An area harboring the entire population of a species of interest, for example, is completely irreplaceable. Low values indicate that an area has many possible replacements. One of the strengths of irreplaceability is the fact that it gives planners spatial options for achieving their objectives. It thus encapsulates a measure of robustness to future area-selection decisions and is particularly suited to the dynamic, uncertain nature of real-world conservation planning.
There are now many software systems available to select conservation areas to achieve objectives and to estimate the irreplaceability of areas. Some of these have been developed specifically for conservation planning. Examples include MARXAN, C-Plan, Zonation, ResNet, and WorldMap. Other systems are less specific to conservation, including those developed, for example, to locate facilities such as fire stations, and general-purpose optimization systems that can be formulated to solve conservation problems.
Considerable research in conservation planning has focused on representation of biodiversity as its objective. Representation is the sampling of biodiversity pattern, such as the number of occurrences of each species, within the boundaries of conservation areas. But planning for representation only makes sense in a static world in which a reserve system is identified and all sites are acquired for protection simultaneously. In practice, reserve systems are often acquired over a multiyear period. During this time, unanticipated complications can wreak havoc with what had once been an optimal or otherwise perfectly sound solution. Simply recomputing new solutions based on updated data each year cannot overcome these shortcomings. To address these issues, conservation objectives must be defined in terms of the persistence of biodiversity over time, recognizing that threats change and conservation actions take place on an ongoing basis.
As with each additional factor considered in conservation planning, accounting for persistence generally requires additional data and computational complexity. But as with other factors, approaches vary in their data and computation requirements. For example, one approach combines biodiversity data (in the form of irreplaceability) with information on the relative vulnerability of prospective conservation areas to threatening processes. In this irreplaceability–vulnerability framework, those areas with high values of both vulnerability and irreplaceability are the highest priority for conservation action: they are the most likely areas to be lost, and because they have few or no replacements, their loss will most severely compromise achievement of the targets. This framework has performed well in a number of studies, but it leaves several trade-offs ambiguous. For example, which should merit higher priority, an area of moderate irreplaceability in imminent danger of destruction or a highly irreplaceable site with little evident near-term threat?
An alternative, the “minimize loss” approach, recognizes the objective function as the arbiter of all such questions. This approach embraces the persistence objective explicitly: the best choice is simply that which results in the least expected loss of biodiversity over time (whether in or out of conservation areas; note that this is different from, and generally more useful than, the maximization of biodiversity represented within conservation areas). The challenge is to develop the data and computational methods that allow this evaluation. Under this approach, a model is needed for the site-specific loss of biodiversity over time and how that loss will change if a conservation area is implemented. In principle, one could use this model and input data with a dynamic optimization technique such as stochastic dynamic programming (SDP) to select the schedule for creating conservation areas that minimizes the loss of biodiversity over some time horizon. In practice, because of the computational complexity, SDP methods are currently applicable only to trivially small problems, and thus, heuristic methods must be used to estimate optimal schedules. Heuristic or not, the key innovation of these tools is that they unify vulnerability and irreplaceability under a common framework based on the conservation objective function.
Accounting for the dynamic and uncertain nature of real-world conservation decisionmaking poses substantial and exciting challenges. Past threats, for example, are not necessarily indicative of future vulnerabilities, and more work is needed to understand biodiversity processes not only as they are changing now but also how they will change in the context of future land use and other dynamics. Further, threats are not the only dynamic processes; costs, opportunities, and other factors change over time and space as well. The importance of each of these must be weighed as individual conservation plans are developed. Moreover, not all threats can be countered by the creation of conservation areas alone. Climate change—representing extremes of both dynamics and uncertainty—poses substantial challenges for conservation decision makers. Preliminary studies suggest that siting conservation areas to protect both present and anticipated future ranges will aid species in adapting to a changing climate. However, such actions depend on the existence of spatial options—which may not exist for the many irreplaceable areas that contain rare and threatened species or other conservation elements—and more work is needed to identify alternative approaches.
Long after conservation areas have been established, additional planning challenges remain in managing them for the persistence of biodiversity. Many of the concepts and tools used to identify conservation areas can be applied to the mapping and scheduling of a variety of conservation actions within them. For example, priorities for work to remove invasive species from systems of conservation areas can be generated based on data on the irreplaceability of species (only those actually threatened by invasives), the severity of invasives, and the cost for invasive species removal for each conservation area. Yet many management actions occur not once but repeatedly over time and thus require additional data and theory for planning. For example, an optimal schedule for allocating prescribed fire among areas for species conservation might require all of the data necessary for one-time actions (e.g., species distributions among sites) plus additional information including the current successional state, habitat-specific rate of succession, species-specific ranges of acceptable fire return intervals, and human context for each area, as well as cost and effectiveness of different treatments and other factors. Optimization tools applied to a model integrating these factors could generate the optimal allocation of scarce funds for fires over both space and time. However, relatively little work has been done to address conservation planning for management. Perhaps simplified objectives—in this case, e.g., the maintenance of a particular distribution of fire-return intervals over the system—may serve as useful surrogates for management models that would otherwise be too data intensive and beyond computational capacity.
Although the theory, data, and methods discussed so far must always be tailored to the conditions at hand, they apply to conservation planning over a broad range of circumstances, even to global scales. Is global conservation planning really necessary? After all, most conservation actions are implemented locally, and most of the US$6 billion in annual conservation spending comes from economically rich countries and is spent within their borders. Yet global biodiversity, threats to it, and the ability of countries to pay for its conservation vary in space. And each year, hundreds of millions of dollars are spent for conservation by nations, nongovernment organizations, and other funders with few a priori geographic restrictions. Moreover, many conservation objectives—preventing species extinctions, for one—are inherently global in scope. Thus, the success of collective efforts to safeguard global biodiversity will depend, in part, on the context and coherence offered by global standards and global planning. Because of this, numerous institutions have developed conservation priority strategies at global scales in recent years.
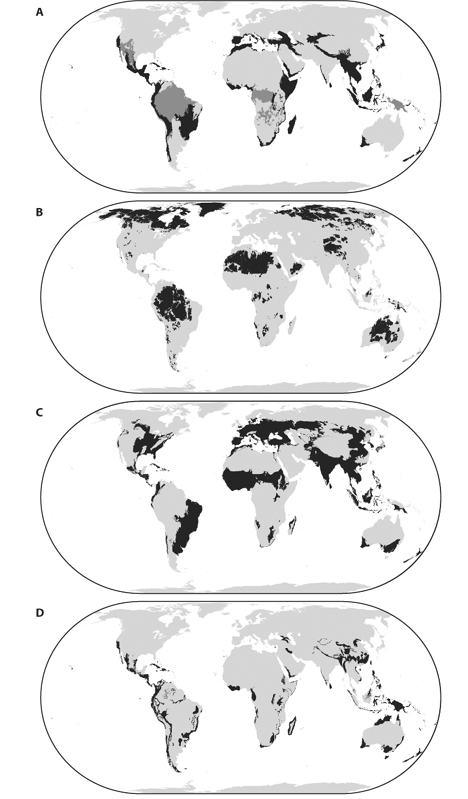
Figure 2. Global conservation priority templates incorporate irreplaceability and vulnerability in different ways. (A) Biodiversity hot spots (black) and high-biodiversity wilderness areas (dark gray). (B) Last of the wild. (C) Crisis ecoregions. (D) Endemic bird areas.
To date, data necessary for conservation action at the scale of individual sites have been unavailable over a global extent. In light of this constraint, most global strategies instead determine a set of priority regions within which to focus conservation actions. At least nine sets, or templates, of global spatial priorities for terrestrial conservation have been published. These templates vary in several respects, including the metrics or taxa of interest and the approach to irreplaceability and vulnerability. The biodiversity hot spots (figure 2A, black), for example, are regions of high irreplaceability (harboring >0.5% of all plant species as endemics) and high vulnerability (>70% loss of original habitat area). High-biodiversity wilderness areas (figure 2A, dark gray), in contrast, prioritize irreplaceability roughly the same way but target low vulnerability, including only regions with <30% loss of original habitat area. Other templates account for irreplaceability but not vulnerability. The “last of the wild” (figure 2B), for example, includes the largest contiguous regions least subject to human impacts (irreplaceability neutral, low vulnerability), whereas the crisis ecoregions (figure 2C) are defined as those areas with the greatest habitat loss relative to protection (irreplaceability neutral, high vulnerability). A final category of templates, for example, endemic bird areas (figure 2D), includes areas of high irreplaceability without regard to vulnerability. Various conservation organizations use these global templates to focus their funding, capacity, and collaborative work within regions where they can, in principle, target finer-scale action to most efficiently meet their respective conservation objectives.
Each of these templates identifies priority regions, but none prescribes action at the finer scales at which most conservation actually takes place. Planning individual conservation areas requires additional data, for multiple reasons. Global patterns of endemism coincide broadly enough among taxa that plants or vertebrate classes can serve as useful (if imperfect) surrogates among regions. For example, hot spots harbor as endemics a minimum 36% of all nonfish vertebrates despite being designed around plants (of which they include >50% as endemics). But these broad-scale endemism patterns are insufficient for finer-scale conservation planning, where primary data on the conservation elements of interest are often necessary. Moving from globally significant regions to fine-scale planning presents planners with unresolved challenges. One is that aggregation of global data at the resolution of whole regions can “average out” finer resolution variations in conservation priority. This means that some low-priority regions contain high-priority patches overlooked in global assessments.
The Convention on Biological Diversity—with 189 countries as parties—has as one of its goals to “establish and strengthen national and regional systems of protected areas integrated into a global network as a contribution to globally agreed goals.” This task is enormous, and no data sets exist to allow such an analysis with conventional systematic conservation planning methods. The Key Biodiversity Areas (KBAs) approach, for example, attempts to prevent global extinctions through an ongoing process identifying and protecting globally significant conservation areas. The approach first attempts to establish and test standardized, quantitative criteria for identifying sites of global conservation significance. Then, based on the premise that effective on-the-ground conservation requires local involvement, the actual application of KBA methods is done bottom-up, at regional scales (subnational-to-multinational) led by scientists within the regions. Since 2002, more than 1700 KBAs have been identified and delineated from across taxonomic groups in more than 30 countries, in addition to the more than 7000 “important bird areas” (KBAs for birds, specifically) identified worldwide in the past 25 years. An additional 595 sites, those identified so far by the Alliance for Zero Extinction as the sole known locations for endangered and critically endangered species, are among the highest priority of all KBAs.
The KBA approach potentially offers useful benefits: global standards based on irreplaceability and vulnerability, bottom-up implementation and support, reduction of data and computational needs for prioritization through prescreening of areas of global significance, and planning units designed around management or species-specific biological requirements. However, to accommodate real-world practicalities, the approach deviates from some theoretical work in conservation planning. For example, whereas traditional approaches seek spatially comprehensive input data sets, KBAs proceed in regional batches as data, capacity, and local interest are available. Regardless, as with any planning strategy, they must be continually evaluated against alternatives to identify those methods most effective in achieving conservation objectives, and revised appropriately where necessary.
From its early phase of rules of thumb operating on simple biodiversity data sets, systematic conservation planning has evolved to integrate various biological and social factors, larger data sets, more sophisticated computational methods, and diverse stakeholders. The field also has a growing track record of successful application to real-world problems. Yet much work remains. For example, many key factors such as cost and threat, although often investigated individually, are seldom integrated into algorithms at the same time. Essential data are often scarce, and methods for acquiring or modeling biodiversity and socioeconomic data efficiently and accurately are sorely needed. Computational methods must improve in speed and ability to handle larger data sets and real-world complexities such as the dynamic nature of planning and conservation management.
Conservation actions interact with uncertain and sometimes unknowable factors. Research must develop methods for planning conservation actions that are robust to incomplete biological knowledge, unpredictable human actions, and climate change. Conservation planning, long studied in the developed world, must be made applicable to the developing world as well. Theoretical advances must be designed and evaluated not only for their ability to obtain efficient solutions but also to encompass issues related to the socioeconomics and the needs and desires of stakeholders. Finally, systems of conservation areas are a cornerstone of effective conservation, but they must be integrated with broader landscapes and seascapes properly managed to maintain critical ecological processes, mitigate habitat fragmentation, and cope with climate change for the long-term persistence of biodiversity.
Brooks, T. M., R. A. Mittermeier, G.A.B. da Fonseca, J. Gerlach, M. Hoffmann, J. F. Lamoreux, C. G. Mittermeier, J. D. Pilgrim, and A.S.L. Rodrigues. 2006. Global biodiversity conservation priorities. Science 313: 58–61. This article examines and compares two decades of priority strategies for conservation at the global scale.
Margules, C. R., and R. L. Pressey. 2000. Systematic conservation planning. Nature 405: 243–253. This comprehensive article provides an overview of the field, with a framework, since extended, for organizing the tasks and decisions involved in the conservation planning process.
Possingham, H. P., K. A. Wilson, S. J. Andelman, and C. H. Vynne. 2006. Protected areas: Goals, limitations, and design. In M. J. Groom, G. K. Meffe, and C. R. Carroll, eds. Principles of Conservation Biology, 3rd ed. Sunderland, MA: Sinauer Associates, 507–533. This recent overview of conservation planning provides discussion of biodiversity processes and conservation design to promote their persistence.
Pressey, R. L., M. Cabeza, M. E. Watts, R. M. Cowling, and K. A. Wilson. 2007. Conservation planning in a changing world. Trends in Ecology and Evolution 22: 583–592. This article summarizes what conservation planners know, and do not know, about two important scientific challenges: dealing with biodiversity processes and human-caused dynamics.
Pressey R. L., R. M. Cowling, and M. Rouget. 2003. Formulating conservation targets for biodiversity pattern and process in the Cape Floristic Region, South Africa. Biological Conservation 112: 99–127. This work provides an introduction to the limitations and advantages of targets, with examples of targets formulated for vegetation types and species in a global biodiversity hot spot.
Rodrigues, A. S., J. O. Cerdeira, and K. J. Gaston. 2000. Flexibility, efficiency, and accountability: Adapting reserve selection algorithms to more complex conservation problems. Ecography 23: 565–574. This article reviews and evaluates trade-offs between optimal methods and heuristics for a variety of conservation planning problems.
Sarkar, S., R. L. Pressey, D. P. Faith, C. R. Margules, T. Fuller, D. M. Stoms, A. Moffett, K. A. Wilson, K. J. Williams, P. H. Williams, and S. Andelman. 2006. Biodiversity conservation planning tools: Present status and challenges for the future. Annual Review of Environment and Resources 31: 123–159. This article provides an overview of software tools for conservation planning, summarizing their capabilities and need for further development.