Our goal in this chapter is to show you how simple the computer that you’re using really is. We will describe in detail a simple imaginary machine that has many of the characteristics of real processors at the heart of the computational devices that surround us.
You may be surprised to learn that many, many machines share these same properties—even some of the very first computers that were developed. Accordingly, we are able to tell the story in historical context. Imagine a world without computers, and which sort of device might be received with enthusiasm, and that is not far from what we have! We tell our story from the standpoint of scientific computing—but there is an equally fascinating story from the standpoint of commercial computing that we touch on just briefly.
Next, our aim is to convince you that the basic concepts and constructs that we covered in Java programming are not so difficult to implement on a simple machine, using its own machine language. We will consider in detail conditionals, loops, functions, arrays, and linked structures. Since these are the same basic tools that we examined for Java, it follows that several of the computational tasks that we addressed in the first part of this book are not difficult to address at a lower level.
This simple machine is a link on the continuum between your computer and the actual hardware circuits that change state to reflect the action of your programs. As such it is preparation for learning how those circuits work, in the next chapter.
And that still is only part of the story. We end the chapter with a profound idea: we can use one machine to simulate the operation of another one. Thus, we can easily study imaginary machines, develop new machines to be built in future, and work with machines that may never be built.
The first step in understanding how a computer works is to understand how information is represented within the computer. As we know from programming in Java, everything suited for processing with digital computers is represented as a sequence of 0s and 1s, whether it be numeric data, text, executable files, images, audio, or video. For each type of data, standard methods of encoding have come into widespread use: the ASCII standard associates a 7-bit binary number with each of 128 distinct characters; the MP3 file format rigidly specifies how to encode each raw audio file as a sequence of 0s and 1s; the .png image format specifies the pixels in digital images ultimately as a sequence of 0s and 1s; and so forth.
Within a computer, information is most often organized in words, which are nothing more than a sequence of bits of a fixed length (known as the word size). The word size plays a critical role in the architecture of any computer, as you will see. In early computers, 12 or 16 bits was the typical word size; for many years, 32-bit words were widely used; and nowadays 64-bit words are the norm.
The information content within every computer is nothing more nor less than a sequence of words, each consisting of a fixed number of bits, each either 0 or 1. Since we can interpret every word as a number represented in binary, all information is numbers, and all numbers are information.
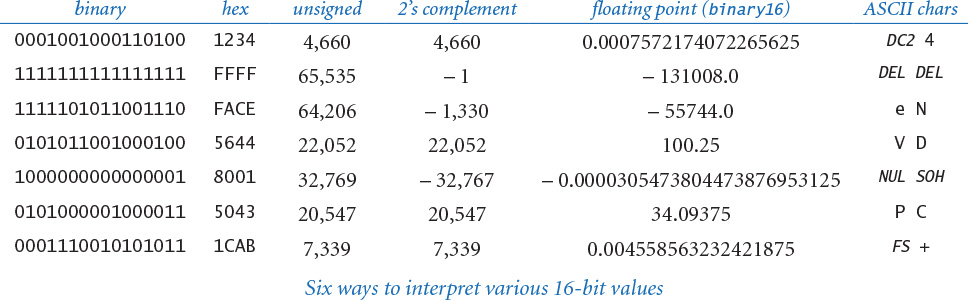
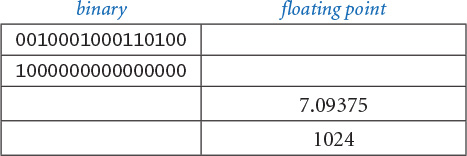
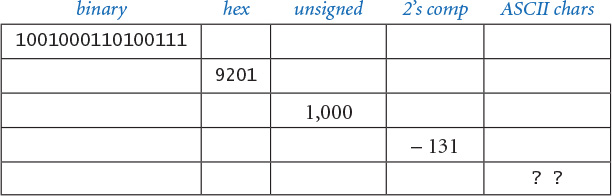
The meaning of a given sequence of bits within a computer depends on the context. This is another of our mantras, which we will repeat throughout this chapter. For example, as you will see, depending on the context, we might interpret the binary string 1111101011001110 to mean the positive integer 64,206, the negative integer –1,330, the real number –55744.0, or the two-character string "eN".
Convenient as it may be for computers, the binary number system is extremely inconvenient for humans. If you are not convinced of this fact, try memorizing the 16-bit binary number 1111101011001110 to the point that you can close the book and write it down. To accommodate the computer’s need to communicate in binary while at the same time accommodating our need to use a more compact representation, we introduce in this section the hexadecimal (base 16) number system, which turns out to be a convenient shorthand for binary. Accordingly, we begin by examining hexadecimal in detail.
For the moment, consider non-negative integers, or natural numbers, the fundamental mathematical abstraction for counting things. Since Babylonian times, people have represented integers using positional notation with a fixed base. The most familiar of these systems is certainly decimal, where the base is 10 and each positive integer is represented as a string of digits between 0 and 9. Specifically, dndn–1...d2d1d0 represents the integer
dn10n + dn–110n–1 + ... + d2102 + d1101 +d0100
For example, 10345 represents the integer
10,345 = 1·10,000 + 0·1,000 + 3·100 + 4·10 +5·1
We can replace the base 10 by any integer greater than 1 to get a different number system where we represent any integer by a string of digits, all between 0 and 1 less than the base. For our purposes, we are particularly interested in two such systems: binary (base 2) and hexadecimal (base 16).
When the base is 2, we represent an integer as a sequence of 0s and 1s. In this case, we refer to each binary (base 2) digit—either 0 or 1—as a bit, the basis for representing information in computers. In this case the bits are coefficients of powers of 2. Specifically, the sequence of bits bnbn–1...b2b1b0 represents the integer
bn 2n + bn–12n–1 + ... + b2 22 + b1 21 + b0 20
For example, 1100011 represents the integer
99 = 1·64 + 1·32 + 0·16 + 0·8 + 0·4 + 1·2 +1·1
Note that the largest integer that we can represent in an n-bit word in this way is 2n – 1, when all n bits are 1. For example, with 8 bits, 11111111 represents
28 – 1 = 255 = 1·128 + 1·64 + 1·32 + 1·16 + 1·8 + 1·4 + 1·2 +1·1
Another way of stating this limitation is to say that we can represent only 2n non-negative integers (0 through 2n – 1) in an n-bit word. We often have to be aware of such limitations when processing integers with a computer. Again, a big disadvantage of using binary notation is that the number of bits required to represent a number in binary is much larger than, for example, the number of digits required to represent the same number in decimal. Using binary exclusively to communicate with a computer would be unwieldy and impractical.
In hexadecimal (or just hex from now on), the sequence of hex digits hnhn–1...h2h1h0 represents the integer
hn16n + hn–116n–1 + ... + h2162 + h1161 + h0160
The first complication we face is that, since the base is 16, we need digits for each of the values 0 through 15. We need to have one character to represent each digit, so we use A for 10, B for 11, C for 12, and so forth, as shown in the table at right. For example, FACE represents the integer
64,206 = 15·163 + 10·162 + 12·161 + 14·160
This is the same integer that we represented with 16 bits earlier. As you can see from this example, the number of hex digits needed to represent integers in hexadecimal is only a fraction (about one-fourth) of the number of bits needed to represent the same integer in binary. Also, the variety in the digits makes a number easy to remember. You may have struggled with 1111101011001110, but you certainly can remember FACE.
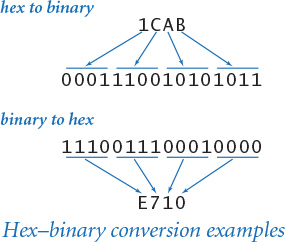
Given the hex representation of a number, finding the binary representation is easy, and vice versa, as illustrated in the figure at left. Since the hex base 16 is a power of the binary base 2, we can convert groups of 4 bits to hex digits, and vice versa. To convert from hex to binary, replace each hex digit by the four binary bits corresponding to its value (see the table at right). Conversely, given the binary representation of a number, add leading 0s to make the number of bits a multiple of 4, then group the bits 4 at a time and convert each group to a single hex digit. You can do the math to prove that these conversions are always correct (see EXERCISE 6.1.8), but just a few examples should serve to convince you. For example, the hex representation of the integer 39 is 27, so the binary representation is 00100111 (and we can drop the leading zeros); the binary representation of 228 is 11100100, so the hex representation is E4. This ability to convert quickly from binary to hex and from hex to binary is important as an efficient way to communicate with the computer. You will be surprised at how quickly you will learn this skill, once you internalize the basic knowledge that A is equivalent to 1010, 5 is equivalent to 0101, F is equivalent to 1111, and so forth.
|
decimal |
binary |
hex |
|
0 |
0000 |
0 |
|
1 |
0001 |
1 |
|
2 |
0010 |
2 |
|
3 |
0011 |
3 |
|
4 |
0100 |
4 |
|
5 |
0101 |
5 |
|
6 |
0110 |
6 |
|
7 |
0111 |
7 |
|
8 |
1000 |
8 |
|
9 |
1001 |
9 |
|
10 |
1010 |
A |
|
11 |
1011 |
B |
|
12 |
1100 |
C |
|
13 |
1101 |
D |
|
14 |
1110 |
E |
|
15 |
1111 |
F |
|
Representations of integers from 0 to 15 |
||
We have considered the problem of computing the string of 0s and 1s that represent the binary number corresponding to a given integer as an early programming example. The following recursive program (the solution to EXERCISE 2.3.15) does the job, and is worthy of careful study:
public static String toBinaryString(int n)
{
if (n == 0) return "";
if (n % 2 == 0)
return toBinaryString(n/2) + '0';
else
return toBinaryString(n/2) + '1';
}
It is a recursive method based on the idea that the last digit is the character that represents n % 2 ('0' if n % 2 is 0 and '1' if n % 2 is 1) and the rest of the string is the string representation of n/2. A sample trace of this program is shown at right. This method generalizes to handle hexadecimal (and any other base). In addition, we are interested in converting string representations to Java data-type values. In the next section, we consider a program that accomplishes such conversions.
toBinaryString(109)
toBinaryString(54)
toBinaryString(27)
toBinaryString(13)
toBinaryString(6)
toBinaryString(3)
toBinaryString(1)
toBinaryString(0)
return ""
return "1"
return "11"
return "110"
return "1101"
return "11011"
return "110110"
return "1101101"
Call trace for toBinaryString(109)
When we talk about what is happening within the computer, our language is hex. The contents of an n-bit computer word can be specified with n/4 hex digits and immediately translated to binary if desired. You likely have observed such usage already in your daily life. For example, when you register a new device on your network, you need to know its media access control (MAC) address. A MAC address such as 1a:ed:b1:b9:96:5e is just hex shorthand (using some superfluous colons and lowercase a-f instead of the uppercase A-F that we use) for a 48-bit binary number that identifies your device for the network.
|
binary |
hex |
dec |
binary |
hex |
dec |
binary |
hex |
dec |
binary |
hex |
|
|
0 |
00000000 |
00 |
32 |
00100000 |
20 |
64 |
01000000 |
40 |
96 |
01100000 |
60 |
|
1 |
00000001 |
01 |
33 |
00100001 |
21 |
65 |
01000001 |
41 |
97 |
01100001 |
61 |
|
2 |
00000010 |
02 |
34 |
00100010 |
22 |
66 |
01000010 |
42 |
98 |
01100010 |
62 |
|
3 |
00000011 |
03 |
35 |
00100011 |
23 |
67 |
01000011 |
43 |
99 |
01100011 |
63 |
|
4 |
00000100 |
04 |
36 |
00100100 |
24 |
68 |
01000100 |
44 |
100 |
01100100 |
64 |
|
5 |
00000101 |
05 |
37 |
00100101 |
25 |
69 |
01000101 |
45 |
101 |
01100101 |
65 |
|
6 |
00000110 |
06 |
38 |
00100110 |
26 |
70 |
01000110 |
46 |
102 |
01100110 |
66 |
|
7 |
00000111 |
07 |
39 |
00100111 |
27 |
71 |
01000111 |
47 |
103 |
01100111 |
67 |
|
8 |
00001000 |
08 |
40 |
00101000 |
28 |
72 |
01001000 |
48 |
104 |
01101000 |
68 |
|
9 |
00001001 |
09 |
41 |
00101001 |
29 |
73 |
01001001 |
49 |
105 |
01101001 |
69 |
|
10 |
00001010 |
0A |
42 |
00101010 |
2A |
74 |
01001010 |
4A |
106 |
01101010 |
6A |
|
11 |
00001011 |
0B |
43 |
00101011 |
2B |
75 |
01001011 |
4B |
107 |
01101011 |
6B |
|
12 |
00001100 |
0C |
44 |
00101100 |
2C |
76 |
01001100 |
4C |
108 |
01101100 |
6C |
|
13 |
00001101 |
0D |
45 |
00101101 |
2D |
77 |
01001101 |
4D |
109 |
01101101 |
6D |
|
14 |
00001110 |
0E |
46 |
00101110 |
2E |
78 |
01001110 |
4E |
110 |
01101110 |
6E |
|
15 |
00001111 |
0F |
47 |
00101111 |
2F |
79 |
01001111 |
4F |
111 |
01101111 |
6F |
|
16 |
00010000 |
10 |
48 |
00110000 |
30 |
80 |
01010000 |
50 |
112 |
01110000 |
70 |
|
17 |
00010001 |
11 |
49 |
00110001 |
31 |
81 |
01010001 |
51 |
113 |
01110001 |
71 |
|
18 |
00010010 |
12 |
50 |
00110010 |
32 |
82 |
01010010 |
52 |
114 |
01110010 |
72 |
|
19 |
00010011 |
13 |
51 |
00110011 |
33 |
83 |
01010011 |
53 |
115 |
01110011 |
73 |
|
20 |
00010100 |
14 |
52 |
00110100 |
34 |
84 |
01010100 |
54 |
116 |
01110100 |
74 |
|
21 |
00010101 |
15 |
53 |
00110101 |
35 |
85 |
01010101 |
55 |
117 |
01110101 |
75 |
|
22 |
00010110 |
16 |
54 |
00110110 |
36 |
86 |
01010110 |
56 |
118 |
01110110 |
76 |
|
23 |
00010111 |
17 |
55 |
00110111 |
37 |
87 |
01010111 |
57 |
119 |
01110111 |
77 |
|
24 |
00011000 |
18 |
56 |
00111000 |
38 |
88 |
01011000 |
58 |
120 |
01111000 |
78 |
|
25 |
00011001 |
19 |
57 |
00111001 |
39 |
89 |
01011001 |
59 |
121 |
01111001 |
79 |
|
26 |
00011010 |
1A |
58 |
00111010 |
3A |
90 |
01011010 |
5A |
122 |
01111010 |
7A |
|
27 |
00011011 |
1B |
59 |
00111011 |
3B |
91 |
01011011 |
5B |
123 |
01111011 |
7B |
|
28 |
00011100 |
1C |
60 |
00111100 |
3C |
92 |
01011100 |
5C |
124 |
01111100 |
7C |
|
29 |
00011101 |
1D |
61 |
00111101 |
3D |
93 |
01011101 |
5D |
125 |
01111101 |
7D |
|
30 |
00011110 |
1E |
62 |
00111110 |
3E |
94 |
01011110 |
5E |
126 |
01111110 |
7E |
|
31 |
00011111 |
1F |
63 |
00111111 |
3F |
95 |
01011111 |
5F |
127 |
01111111 |
7F |
|
Decimal, 8-bit binary, and 2-digit hex representations of integers from 0 to 127 |
|||||||||||
|
binary |
hex |
dec |
binary |
hex |
dec |
binary |
hex |
dec |
binary |
hex |
|
|
128 |
10000000 |
80 |
160 |
10100000 |
A0 |
192 |
11000000 |
C0 |
224 |
11100000 |
E0 |
|
129 |
10000001 |
81 |
161 |
10100001 |
A1 |
193 |
11000001 |
C1 |
225 |
11100001 |
E1 |
|
130 |
10000010 |
82 |
162 |
10100010 |
A2 |
194 |
11000010 |
C2 |
226 |
11100010 |
E2 |
|
131 |
10000011 |
83 |
163 |
10100011 |
A3 |
195 |
11000011 |
C3 |
227 |
11100011 |
E3 |
|
132 |
10000100 |
84 |
164 |
10100100 |
A4 |
196 |
11000100 |
C4 |
228 |
11100100 |
E4 |
|
133 |
10000101 |
85 |
165 |
10100101 |
A5 |
197 |
11000101 |
C5 |
229 |
11100101 |
E5 |
|
134 |
10000110 |
86 |
166 |
10100110 |
A6 |
198 |
11000110 |
C6 |
230 |
11100110 |
E6 |
|
135 |
10000111 |
87 |
167 |
10100111 |
A7 |
199 |
11000111 |
C7 |
231 |
11100111 |
E7 |
|
136 |
10001000 |
88 |
168 |
10101000 |
A8 |
200 |
11001000 |
C8 |
232 |
11101000 |
E8 |
|
137 |
10001001 |
89 |
169 |
10101001 |
A9 |
201 |
11001001 |
C9 |
233 |
11101001 |
E9 |
|
138 |
10001010 |
8A |
170 |
10101010 |
AA |
202 |
11001010 |
CA |
234 |
11101010 |
EA |
|
139 |
10001011 |
8B |
171 |
10101011 |
AB |
203 |
11001011 |
CB |
235 |
11101011 |
EB |
|
140 |
10001100 |
8C |
172 |
10101100 |
AC |
204 |
11001100 |
CC |
236 |
11101100 |
EC |
|
141 |
10001101 |
8D |
173 |
10101101 |
AD |
205 |
11001101 |
CD |
237 |
11101101 |
ED |
|
142 |
10001110 |
8E |
174 |
10101110 |
AE |
206 |
11001110 |
CE |
238 |
11101110 |
EE |
|
143 |
10001111 |
8F |
175 |
10101111 |
AF |
207 |
11001111 |
CF |
239 |
11101111 |
EF |
|
144 |
10010000 |
90 |
176 |
10110000 |
B0 |
208 |
11010000 |
D0 |
240 |
11110000 |
F0 |
|
145 |
10010001 |
91 |
177 |
10110001 |
B1 |
209 |
11010001 |
D1 |
241 |
11110001 |
F1 |
|
146 |
10010010 |
92 |
178 |
10110010 |
B2 |
210 |
11010010 |
D2 |
242 |
11110010 |
F2 |
|
147 |
10010011 |
93 |
179 |
10110011 |
B3 |
211 |
11010011 |
D3 |
243 |
11110011 |
F3 |
|
148 |
10010100 |
94 |
180 |
10110100 |
B4 |
212 |
11010100 |
D4 |
244 |
11110100 |
F4 |
|
149 |
10010101 |
95 |
181 |
10110101 |
B5 |
213 |
11010101 |
D5 |
245 |
11110101 |
F5 |
|
150 |
10010110 |
96 |
182 |
10110110 |
B6 |
214 |
11010110 |
D6 |
246 |
11110110 |
F6 |
|
151 |
10010111 |
97 |
183 |
10110111 |
B7 |
215 |
11010111 |
D7 |
247 |
11110111 |
F7 |
|
152 |
10011000 |
98 |
184 |
10111000 |
B8 |
216 |
11011000 |
D8 |
248 |
11111000 |
F8 |
|
153 |
10011001 |
99 |
185 |
10111001 |
B9 |
217 |
11011001 |
D9 |
249 |
11111001 |
F9 |
|
154 |
10011010 |
9A |
186 |
10111010 |
BA |
218 |
11011010 |
DA |
250 |
11111010 |
FA |
|
155 |
10011011 |
9B |
187 |
10111011 |
BB |
219 |
11011011 |
DB |
251 |
11111011 |
FB |
|
156 |
10011100 |
9C |
188 |
10111100 |
BC |
220 |
11011100 |
DC |
252 |
11111100 |
FC |
|
157 |
10011101 |
9D |
189 |
10111101 |
BD |
221 |
11011101 |
DD |
253 |
11111101 |
FD |
|
158 |
10011110 |
9E |
190 |
10111110 |
BE |
222 |
11011110 |
DE |
254 |
11111110 |
FE |
|
159 |
10011111 |
9F |
191 |
10111111 |
BF |
223 |
11011111 |
DF |
255 |
11111111 |
FF |
|
Decimal, 8-bit binary, and 2-digit hex representations of integers from 128 to 255 |
|||||||||||
Later in this chapter, we will be particularly interested in integers less than 256, which can be specified with 8 bits and 2 hex digits. For reference, we have included on the previous two pages a complete table of their representations in decimal, binary, and hex. A few minutes studying this table is worth your while, to give you confidence in working with such integers and understanding the relationships among these representations. If you believe, after doing so, that the table is a waste of space, then we have achieved our goal!
Converting among different representations of integers is an interesting computational task, which we first considered in PROGRAM 1.3.7 and then revisited in EXERCISE 2.3.15. We have also been making use of Java’s methods for such tasks throughout. Next, to cement ideas about positional number representations with various bases, we will consider a program for converting any number from one base to another.
Converting a string of characters to an internal representation is called parsing. Since SECTION 1.1, we have been using Java methods like Integer.parseInt() and our own methods like StdIn.readInt() to convert numbers from the strings that we type to values of Java’s data types. We have been using decimal numbers (represented as strings of the characters between 0 and 9), now we look at a method to parse numbers written in any base. For simplicity, we limit ourselves to bases no more than 36 and extend our convention for hex to use the letters A though Z to represent digits from 10 to 35. Note: Java’s Integer class has a two-argument parseInt() method that has similar functionality, except that it also handles negative integers.
|
|
|
characters seen |
|
|
|
1 |
|
|
|
11 |
|
|
|
110 |
|
|
|
1101 |
|
|
|
11011 |
|
|
|
110110 |
|
|
|
1101101 |
|
Trace of |
||
One of the hallmark features of modern data types is that the internal representation is hidden from the user, so we can use only defined operations on data type values to accomplish the task. Specifically, it is best to limit direct reference to the bits that represent a data type value, and to use data-type operations instead.
The first primitive operation that we need to parse a number is a method that converts a character into an integer. EXERCISE 6.1.12 gives a method toInt() that takes a character in the range 0-9 or A-Z as an argument and returns an int value between 0 and 35 (0–9 for digits and 10–35 for letters). With this primitive, the rather simple method parseInt() in PROGRAM 6.1.1 parses the string representation of an integer in any base b from 2 to 36 and returns the Java int value for that integer. As usual, we can convince ourselves that it does so by reasoning about the effect of the code in the loop. Each time through the loop, the int value n is the integer corresponding to all the digits seen so far. To maintain this invariant, all we need to do is multiply by the base and add the value of the next digit. The trace shown here illustrates the process: each value of n is the base times the previous value of n plus the next digit (in blue). To parse 1101101, we compute 0·2 + 1 = 1, 1·2 + 1 = 3, 3·2 + 0 = 6, 6·2 + 1 = 13, 13·2 + 1 = 27, 27·2 + 0 = 54, and 54·2 + 1 = 109. To parse FACE as a hex number, we compute 0·16 + 15 = 15, 15·16 + 10 = 250, 250·16 + 12 = 4,012, and 4,012·16 + 14 = 64,206. This is a special case of polynomial evaluation via Horner’s method (see EXERCISE 2.1.31).
Program 6.1.1 Converting a natural number from one base to another
public class Convert
{
public static int toInt(char c)
{ /* See Exercise 6.1.12. */ }
public static char toChar(int i)
{ /* See Exercise 6.1.13. */ }
public static int parseInt(String s, int d)
{
int n = 0;
for (int i = 0; i < s.length(); i++)
n = d*n + toInt(s.charAt(i));
return n;
}
public static String toString(int n, int d)
{
if (n == 0) return "";
return toString(n/d, d) + toChar(n % d);
}
public static void main(String[] args)
{
while (!StdIn.isEmpty())
{
String s = StdIn.readString();
int baseFrom = StdIn.readInt();
int baseTo = StdIn.readInt();
int n = parseInt(s, baseFrom);
StdOut.println(toString(n, baseTo));
}
}
}
% java Convert
1101101 2 10
109
FACE 16 10
64206
FACE 16 2
1111101011001110
109 10 2
1101101
64206 10 16
FACE
64206 10 32
1UME
1UME 32 10
64206
This general-purpose conversion program reads strings and pairs of bases from standard input and uses parseInt() and toString() to convert the string from a representation of an integer in the first base to a representation of the same integer in the second base.
|
|
characters seen |
|
|
|
|
"F" |
|
|
|
"FA" |
|
|
|
"FAC" |
|
|
|
"FACE" |
|
Trace of |
||
For simplicity, we have not included error checks in this code. For example, parseInt() should raise an exception if the value returned by toInt() is not less than the base. Also, it should throw an exception on overflow, as the input could be a string that represents a number larger than can be represented as a Java int.
Using a toString() method to compute a string representation of a data-type value is also something that we have been doing since the beginning of this book. We use a recursive method that generalizes the decimal-to-binary method (the solution to EXERCISE 2.3.15) that we considered earlier in this section. Again, it is instructive to look at a method to compute the string representation of an integer in any given base, even though Java’s Integer class has a two-argument toString() method that has similar functionality.
toString(64206, 16)
toString(4012, 16)
toString(250, 16)
toString(15, 16)
toString(0, 16)
return ""
return "F"
return "FA"
return "FAC"
return "FACE"
Call trace for toString(64206, 16)
Again, the first primitive operation that we need is a method that converts an integer into a character (digit). EXERCISE 6.1.13 gives a method toChar() that takes an int value between 0 and 35 and returns a character in the range 0-9 (for values less than 10) or A-Z (for values from 10 to 35). With this primitive, the toString() method in PROGRAM 6.1.1 is even simpler than parseInt(). It is a recursive method based on the idea that the last digit is the character representation of n % d and the rest of the string is the string representation of n / d. The computation is essentially the inverse of the computation for parsing, as you can see from the call trace shown at the bottom of the previous page.
When discussing the contents of computer words, we need to include leading zeros, so that we are specifying all the bits. For this reason, we include a three-argument version of toString() in Convert, where the third argument is the desired number of digits in the returned string. For example, the call toString(15, 16, 4) returns 000F and the call toString(14, 2, 16) returns 0000000000001110. Implementation of this version is left as an exercise (see EXERCISE 6.1.15).
Putting all of these ideas together, PROGRAM 6.1.1 is a general-purpose tool for computing numbers from one base to another. While the standard input stream is not empty, the main loop in the test client reads a string from standard input, followed by two integers (the base in which the string is expressed and the base in which the result is to be expressed); it performs the specified conversion and prints the result. To accomplish this task, it uses parseInt() to convert the input string to a Java int, then it uses toString() to convert that Java int to a string representation of the number in the specified base. You are encourage to download and make use of this tool to familiarize yourself with number conversion and representation.
The first operations that we consider on integers are basic arithmetic operations like addition and multiplication. Indeed, the primary purpose of early computing devices was to perform such operations repeatedly. In the next chapter, we will be studying the idea of building computational devices that can do so, since every computer has built-in hardware for performing such operations. For the moment, we illustrate that the basic methods you learned in grade school for decimal work perfectly well in binary and hex.
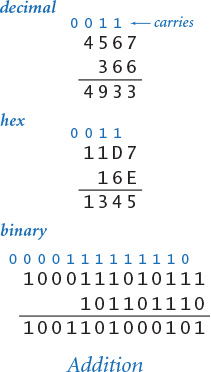
In grade school you learned how to add two decimal integers: add the two least significant digits (rightmost digits); if the sum is more than 10, then carry a 1 and write down the sum modulo 10. Repeat with the next digit, but this time include the carry bit in the addition. The same procedure generalizes to any base. For example, if you are working in hex and the two summand digits are 7 and E, then you should write down a 5 and carry a 1 because 7 + E is 15 in hex. If you are working in binary and the two summand bits are 1 and the carry is 1, then you should write down a 1 and carry the 1 because 1+1+1 = 11 in binary. The examples at left illustrate how to compute the sum 456710 + 36610 = 493310 in decimal, hex, and binary. As in grade school, we suppress leading zeros.
|
decimal |
binary |
|
0 |
0000 |
|
1 |
0001 |
|
2 |
0010 |
|
3 |
0011 |
|
4 |
0100 |
|
5 |
0101 |
|
6 |
0110 |
|
7 |
0111 |
|
8 |
1000 |
|
9 |
1001 |
|
10 |
1010 |
|
11 |
1011 |
|
12 |
1100 |
|
13 |
1101 |
|
14 |
1110 |
|
15 |
1111 |
|
4-bit integers |
|
If we want to represent integers within a computer word, we are immediately accepting a limitation on the number and size of integers that we can represent. As already noted, we can represent only 2n integers in an n-bit word. If we want just nonnegative (or unsigned) integers, the natural choice is to use binary for the integers 0 through 2n – 1, with leading 0s so that every word corresponds to an integer and every integer within the defined range corresponds to a word. The table at right shows the 16 unsigned integers we can represent in a 4-bit word, and the table at left shows the range of representable integers for the 16-bit, 32-bit, and 64-bit word sizes that are used in typical computers.
|
bits |
smallest |
largest |
|
4 |
0 |
15 |
|
16 |
0 |
65,535 |
|
32 |
0 |
4,294,967,295 |
|
64 |
0 |
18,446,744,073,709,551,615 |
|
Representable unsigned integers |
||
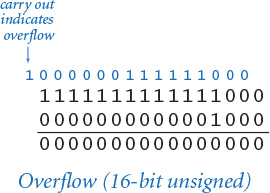
As you have already seen with Java programming in SECTION 1.2, we need to pay attention to ensure that the value of the result of an arithmetic operation does not exceed the maximum possible value. This condition is called overflow. For addition in unsigned integers, overflow is easy to detect: if the last (leftmost) addition causes a carry, then the result is too large to represent. Testing the value of one bit is easy, even in computer hardware (as you will see), so computers and programming languages typically include low-level instructions to test for this possibility. Remarkably, Java does not do so (see the Q&A in SECTION 1.2).
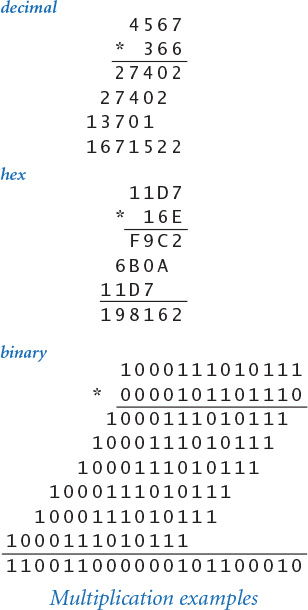
Similarly, as illustrated in the diagram at right, the grade-school algorithm for multiplication works perfectly well with any base. (The binary example is difficult to follow because of cascading carries: if you try to check it, add the numbers two at a time.) Actually, computer scientists have discovered multiplication algorithms that are much better suited to implementation in a computer and much more efficient than this method. In early computers, programmers had to do multiplication in software (we will illustrate such an implementation much later, in EXERCISE 6.3.35). Note that overflow is a much greater concern when developing a multiplication algorithm than for addition, as the number of bits in the result can be twice the number of bits in the operands. That is, when you multiply two n-bit numbers, you need to be prepared for a 2n-bit result.
In this book, we certainly cannot describe in depth all of the techniques that have been developed to perform arithmetic operations with computer hardware. Of course, you want your computer to perform division, exponentiation, and other operations efficiently. Our plan is to cover addition/subtraction in full detail and to offer just some brief information about other operations.
You also want to be able to compute with negative numbers and real numbers. Next, we briefly describe standard representations that allow for these operations.
Computer designers discovered early on that it is not difficult to modify the integer data type to include negative numbers, using a representation known as two’s complement.
The first approach that you might think of would be to use a sign-and-magnitude representation, where the first bit is the sign and the rest of bits indicate the magnitude of the number. For example, with 4 bits in this representation, 0101 would represent +5 and 1101 would represent –5. By contrast, in n-bit two’s complement, we represent positive numbers as before, but we represent each negative number –x with the (positive, unsigned) binary number 2n – x. For example, the table at left shows the 16 two’s complement integers we can represent in a 4-bit word. You can see that 0101 still represents +5 but 1011 represents –5, because 24 – 5 = 1110 = 10112.
|
decimal |
binary |
|
0 |
0000 |
|
1 |
0001 |
|
2 |
0010 |
|
3 |
0011 |
|
4 |
0100 |
|
5 |
0101 |
|
6 |
0110 |
|
7 |
0111 |
|
8 |
1000 |
|
9 |
1001 |
|
10 |
1010 |
|
11 |
1011 |
|
12 |
1100 |
|
13 |
1101 |
|
14 |
1110 |
|
15 |
1111 |
|
4-bit integers (unsigned) |
|
With one bit reserved for the sign, the largest two’s complement number that we can represent is about half the largest unsigned integer that we could represent with the same number of bits. As you can see from the 4-bit example, there is a slight asymmetry in two’s complement: we represent the positive numbers 1 through 7 and the negative numbers – 8 through –1, and we have a single representation of 0. In general, in n-bits two’s complement, the smallest possible negative number is – 2n – 1 and the largest possible positive number is 2n – 1 – 1. The table at left shows the smallest and largest (in absolute value) 16-bit two’s complement integers.
|
decimal |
binary |
|
0 |
0000000000000000 |
|
1 |
0000000000000001 |
|
2 |
0000000000000010 |
|
3 |
0000000000000011 |
|
... |
... |
|
32765 |
0111111111111101 |
|
32766 |
0111111111111110 |
|
32767 |
0111111111111111 |
|
-32768 |
1000000000000000 |
|
-32767 |
1000000000000001 |
|
-32766 |
1000000000000010 |
|
-32765 |
1000000000000011 |
|
... |
... |
|
-3 |
1111111111111101 |
|
-2 |
1111111111111110 |
|
-1 |
1111111111111111 |
|
16-bit integers |
|
There are two primary reasons that two’s complement evolved as the standard over sign-and-magnitude. First, because there is only one representation of 0 (the binary string that is all 0s), testing whether a value is 0 is as easy as possible. Second, arithmetic operations are easy to implement—we discuss this for addition later in this section. Moreover, as with sign-and-magnitude, the leading bit indicates the sign, so testing whether a value is negative is as easy as possible. Building computer hardware is sufficiently difficult that achieving these simplifications just by adopting a convention on how we represent numbers is compelling.
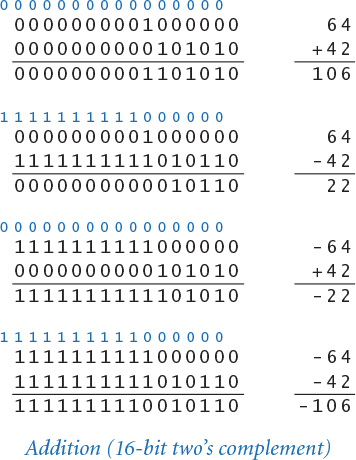
Adding two n-bit two’s complement integers is also easy: add them as if they were unsigned integers. For example, 2 + (– 7) = 0010 + 1001 = 1011 = –5. Proving that this is the case when result is within range (between – 2n – 1 and 2n – 1 – 1) is not difficult:
• If both integers are non-negative, then standard binary addition as we have described it applies, as long as the result is less than 2n – 1.
• If both integers are negative, then the sum is
(2n – x) + (2n – y) = 2n + 2n – (x + y)
• If x is negative, y is positive, and the result is negative, then we have
(2n – x) + y = 2n – (x – y)
• If x is negative, y is positive, and the result is positive, then we have
(2n – x) + y = 2n + (y – x)
In the second and fourth cases, the extra 2n term does not contribute to the n-bit result (it is the carry out), so a standard binary addition (ignoring the carry out) gives the result. Detecting overflow is a bit more complicated than for unsigned integers—we leave that for the Q&A.
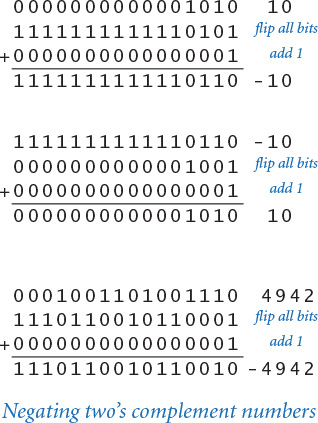
To compute x – y, we compute x + (– y). That is, we can still use standard binary addition, if we know how to compute – y. It turns out that negating a number is very easy in two’s complement: flip the bits and then add 1. Three examples of this process are shown at left—we leave the proof that it works for an exercise.
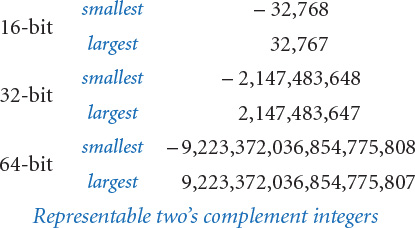
Knowing two’s complement is relevant for Java programmers because short, int, and long values are 16-, 32-, and 64-bit two’s complement integers, respectively. This explains the bounds on values of these types that Java programmers have to recognize (shown in the table at the top of the next page).
Moreover, Java’s two’s complement representation explains the behavior on overflow in Java that we first observed in SECTION 1.2 (see the Q&A in that section, and EXERCISE 1.2.10). For example, we saw that, for any of Java’s integer types, the result of adding 1 to the largest positive integer, is the largest negative integer. In 4-bit two’s complement, incrementing 0111 gives 1000; in 16-bit two’s complement, incrementing 0111111111111111 gives 1000000000000000. (Note that this is the only case where incrementing a two’s complement integer does not produce the expected result.) The behavior of the other cases in EXERCISE 1.2.10 is also easily explained. For decades, such behavior has bewildered programmers who do not take the time to learn about two’s complement. Here is one convincing example: in Java, the call Math.abs(-2147483648) returns -2147483648, a negative integer!
|
16-bit |
smallest |
– 32,768 |
|
largest |
32,767 |
|
|
32-bit |
smallest |
– 2,147,483,648 |
|
largest |
2,147,483,647 |
|
|
64-bit |
smallest |
– 9,223,372,036,854,775,808 |
|
largest |
9,223,372,036,854,775,807 |
|
|
Representable two’s complement integers |
How do we represent real numbers? This task is a bit more challenging than representing integers, as many choices must be made. Early computer designers tried many, many options and numerous competing formats evolved during the first few decades of digital computation. Arithmetic on real numbers was actually implemented in software for quite a while, and was quite slow by comparison with integer arithmetic.
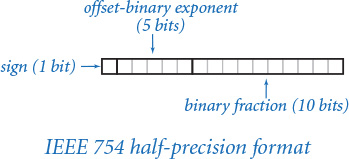
By the mid-1980s, the need for a standard was obvious (different computers might get slightly different results for the same computation), so the Institute for Electrical and Electronic Engineers (IEEE) developed a standard known as IEEE 754—a standard that is still under development to this day. The standard is extensive—you may not want to know the full details—but we can describe the basic ideas briefly here. We illustrate with a 16-bit version known as the IEEE 754 half-precision binary floating-point format, or binary16 for short. The same essential ideas apply to the 32-bit and 64-bit versions used in Java.
The real-number representation that is commonly used in computer systems is known as floating point. It is just like scientific notation, except that everything is represented in binary. In scientific notation, you are used to working with numbers like + 6.0221413 × 1023, which consist of a sign, a coefficient, and an exponent. Typically the number is expressed such that the coefficient is one (nonzero) digit. This is known as a normalization condition. In floating point, we have the same three elements.
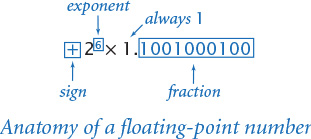
The first bit of a floating-point number is its sign. Nothing special is involved: the sign bit is 0 is the number is positive (or zero) and 1 if it is negative. Again, checking whether a number is positive or negative is easy.
|
decimal |
binary |
|
-15 |
00000 |
|
-14 |
00001 |
|
-13 |
00010 |
|
-12 |
00011 |
|
-11 |
00100 |
|
-10 |
00101 |
|
-9 |
00110 |
|
-8 |
00111 |
|
-7 |
01000 |
|
-6 |
01001 |
|
-5 |
01010 |
|
-4 |
01011 |
|
-3 |
01100 |
|
-2 |
01101 |
|
-1 |
01110 |
|
0 |
01111 |
|
1 |
10000 |
|
2 |
10001 |
|
3 |
10010 |
|
4 |
10011 |
|
5 |
10100 |
|
6 |
10101 |
|
7 |
10110 |
|
8 |
10111 |
|
9 |
11000 |
|
10 |
11001 |
|
11 |
11010 |
|
12 |
11011 |
|
13 |
11100 |
|
14 |
11101 |
|
15 |
11110 |
|
16 |
11111 |
|
5-bit integers |
|
The next t bits of a floating-point number are devoted to its exponent. The numbers of bits used for binary16, binary32, and binary64 are 5, 8, and 11, respectively. The exponent of a floating-point number is not expressed in two’s complement, but rather in offset binary, where we take R = 2 t – 1 – 1 (15, 127, and 1,023 for t = 5, 8, and 11, respectively) and represent any decimal number x between –R and R + 1 with the binary representation of x + R. The table at right shows the 5-bit offset binary representations of the numbers between –15 and +16. In the standard, 0000 and 1111 are used for other purposes.
The rest of the bits in a floating-point number are devoted to the coefficient: 10, 23, and 53 bits for binary16, binary32, and binary64, respectively. The normalization condition implies that the digit before the decimal place in the coefficient is always 1, so we need not include that digit in the representation!
Given these rules, the process of decoding a number encoded in IEEE 754 format is straightforward, as illustrated in the top example in the figure at the top of the next page. According to the standard, the first bit in the given 16-bit quantity is the sign, the next five bits are the offset binary encoding of the exponent (– 610), and the next 10 bits are the fraction, which defines the coefficient 1.1012. The process of encoding a number, illustrated in the bottom example, is more complicated, due to the need to normalize and to extend binary conversion to include fractions. Again, the first bit is the sign bit, the next five bits are the exponent, and the next 10 bits are the fraction. These tasks make for a challenging programming exercise even in a high-level language like Java (see EXERCISE 6.1.25, but first read about manipulating bits in the next subsection), so you can imagine why floating-point numbers were not supported in early computer hardware and why it took so long for a standard to evolve.
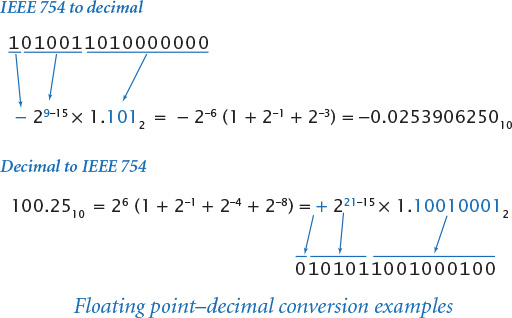
Java’s Float and Double data types include a floatToIntBits() method that you can use to check floating-point encoding. For example, the call
Convert.toString(Float.floatToIntBits(100.25), 2, 16)
prints the result 0101011001000100 as expected from the second example above.
Performing arithmetic on floating-point numbers also makes for an interesting programming exercise. For example, the following steps are required to multiply two floating-point numbers:
• Exclusive or the signs.
• Add the exponents.
• Multiply the fractions.
• Normalize the result.
If you are interested, you can explore the details of this process and the corresponding process for addition and for multiplication by working EXERCISE 6.1.25. Addition is actually a bit more complicated than multiplication, because it is necessary to “unnormalize” to make the exponents match as the first step.
Computing with floating-point numbers is often challenging because they are most often approximations to the real numbers of interest, and errors in the approximation can accumulate during a long series of calculations. Since the 64-bit format (used in Java’s double data type) has more than twice as many bits in the fraction as the 32-bit format (used in Java’s float data type), most programmers choose to use double to lessen the effects of approximations errors, as we do in this book.
As you can see from floating-point encoding of real numbers, encoding information in binary can get complicated. Next, we consider the tools available within Java that facilitate the development of programs to encode and decode information. These tools are made possible because Java defines integer values to be two’s complement integers, and makes explicit that the values of the short, int, and long data types are 16-, 32-, and 64-bit binary two’s complement, respectively. Not all languages do so; some instead leave such code to a lower-level language, define an explicit data type for bit sequences, and/or perhaps require difficult or expensive conversion. We focus on 32-bit int values, but the operations also work for short and long values.
In Java, it is possible to specify integer literal values in binary (by prepending 0b) and in hex (by prepending 0x). This strategy substantially clarifies code that is working with binary values. You can use literals like this anywhere that you can use a decimal literal; it is just another way of specifying an integer value. If you assign a hex literal to an int variable and specify fewer than 8 digits, Java will fill in the leading zeros. A few examples are shown in the table at right.
|
binary literal |
hex literal |
shorter form |
|
0b01000000010101000100111101011001 |
0×40544F59 |
|
|
0b11111111111111111111111111111111 |
0×0000000F |
0×F |
|
0b00000000000000000001001000110100 |
0×00001234 |
0×1234 |
|
0b00000000000000001000101000101011 |
0×00008A2B |
0×8A2B |
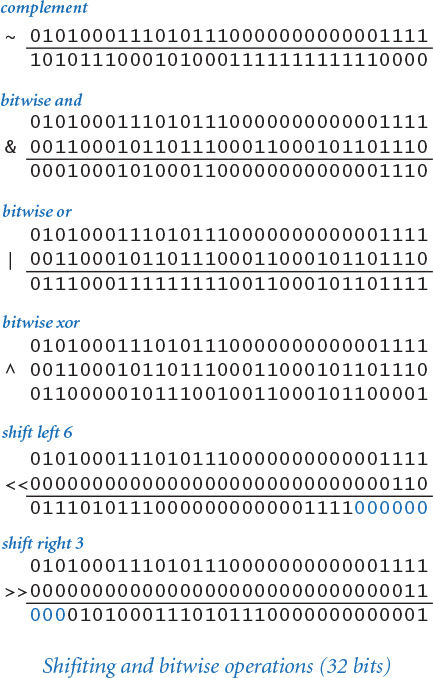
To allow clients to manipulate the bits in an int value, Java supports the operations shown in the table at the bottom of this page. We can complement the bits (change the 0s to 1s and the 1s to 0s), do bitwise logical operations (apply the and, or, and xor functions defined at the bottom of the next page to the corresponding pairs of bits), and shift left or right a given number of bit positions. For shift right, there are two options: logical shift, where 0s are filled in at the left, and arithmetic shift, where vacated positions are filled with the sign bit (see the Q&A at the end of this section). Examples of these operations are shown at right.
|
values |
32-bit integers |
||||||
|
typical literals |
|
||||||
|
operations |
bitwise complement |
bitwise and |
bitwise or |
bitwise xor |
shift left |
shift right (logical) |
shift right (arithmetic) |
|
operators |
~ |
& |
| |
^ |
<< |
>>> |
>> |
|
Bit manipulation operators for Java’s built-in |
|||||||
One of the primary uses of such operations is masking, where we isolate a bit or a group of bits from the others in the same word. Usually we prefer to specify masks as hex constants. For example, the mask 0x80000000 can be used to isolate the leftmost bit in a 32-bit word, the mask 0x000000FF can be used to isolate the rightmost 8 bits, and the mask 0x007FFFFF can be used to isolate the rightmost 23 bits.
Going a bit further, we often do shifting and masking to extract the integer value that a contiguous group of bits represents, as follows:
• Use a shift right instruction to put the bits in the rightmost position.
• If we want k bits, create a literal mask whose bits are all 0 except its k rightmost bits, which are 1.
• Use a bitwise and to isolate the bits. The 0s in the mask lead to zeros in the result; the 1s in the mask give the bits of interest in the result.
This sequence of operations enables us to use the result as we would any other int value, which is often what is desired. Later in this chapter we will be interested in shifting and masking to isolate hex digits, as shown in the example at right.
|
x |
y |
AND(x,y) |
OR(x,y) |
XOR(x,y) |
|
0 |
0 |
0 |
0 |
0 |
|
0 |
1 |
0 |
1 |
1 |
|
1 |
0 |
0 |
1 |
1 |
|
1 |
1 |
1 |
1 |
0 |
|
Truth-table definitions for bitwise functions |
||||
|
expression |
value |
|
|
|
|
|
|
|
Shifting and masking example |
|
Program 6.1.2 Extracting the components of a floating-point number
public class ExtractFloat
{
public static void main(String[] args)
{
float x = Float.parseFloat(args[0]);
int t = Float.floatToIntBits(x);
if ((t & 80000000) == 1) StdOut.println("Sign: -");
else StdOut.println("Sign: +");
int exponent = ((t >> 23) & 0xFF) - 127;
StdOut.println("Exponent: " + exp);
double fraction = 1.0 * (t & 0x007FFFFF) / (1 << 23);
double mantissa = 1.0 + fraction;
StdOut.println("Mantissa: " + mantissa);
StdOut.println(mantissa * (1 << exponent));
}
}
This program illustrates the use of Java bit manipulation operations by extracting the sign, exponent, and fraction fields from float values entered as the command-line argument, then using the exponent and fraction to recompute the absolute value of the number.
% java ExtractFloat -100.25
Sign: -
Exponent: 6
Mantissa: 1.56640625
100.25
As an example of a practical application of bitwise operations, PROGRAM 6.1.2 illustrates the use of shifting and masking to extract the sign, exponent, and fraction from a floating-point number. Most computer users are able to work comfortably without dealing with data representations at this level (indeed, we have hardly needed it so far in this book), but, as you will see, bit manipulation plays an important role in all sorts of applications.
To process text, we need a binary encoding for characters. The basic method is quite simple: a table defines the correspondence between characters and n-bit unsigned binary integers. With 6 bits, we can encode 64 different characters; with 7 bits, 128 different characters; with 8 bits, 256 different characters; and so forth. As with floating-point numbers, many different schemes evolved as computers came into use, and people still use different encodings in different situations.
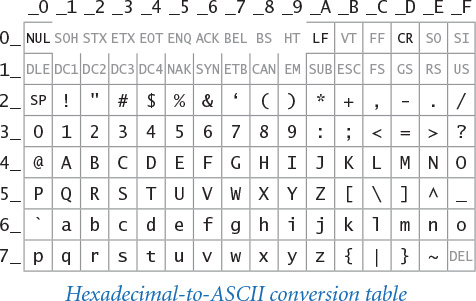
The American Standard Code for Information Interchange (ASCII) code was developed as a standard in the 1960s, and has been in widespread use ever since. It is a 7-bit code, though in modern computing it most often is used in 8-bit bytes, with the leading bit being ignored.
One of the primary reasons for the development of ASCII was for communication via teletypewriters that could send and receive text. Accordingly, many of the encoded characters are control characters for such machines. Some of the control characters were part of communications protocols (for example, ACK means “acknowledge”); others controlled the printing aspect of the machine (for example, BS means “backspace” and CR means “carriage return”).
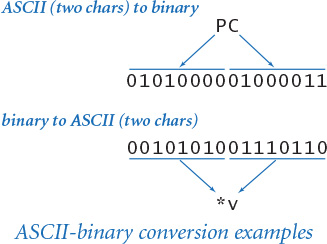
The table at right is a definition of ASCII that provides the correspondence that you need to convert from 8-bit binary (equivalently, 2-digit hex) to a character and back. Use the first hex digit as a row index and the second hex digit as a column index to find the character that it encodes. For example, 31 encodes the digit 1, 4A encodes the letter J, and so forth. This table is for 7-bit ASCII, so the first hex digit must be 7 or less. Hex numbers starting with 0 and 1 (and the numbers 20 and 7F) correspond to nonprinting control characters such as CR, which now means “newline” (most of the others are rarely used in modern computing).
In the connected world of the 21st century, it is necessary to work with many more than the 100 or so ASCII characters from the 20th century, so a new standard known as Unicode is emerging. By using 16 bits for most characters (and up to 24 or 32 bits for some characters), Unicode can support tens of thousands of characters and a broad spectrum of the world’s languages. The UTF-8 encoding (from sequences of characters to sequences of 8-bit bytes, and vice versa, with most characters mapping to two bytes) is rapidly emerging as a standard. The rules are complicated but comprehensive, and they are implemented in most modern systems (such as Java) so programmers generally need not worry much about the details. ASCII survives within Unicode: all ASCII characters map to 1 byte, so ASCII files are special cases of UTF-8 files (and backward compatible).
We generally pack as much information as possible into a computer word, so it is possible to encode two ASCII characters in 16 bits (as shown in the example at right), four characters in 32 bits, eight characters in 64 bits, and so forth. In high-level languages such as Java, such details and UTF-8 encoding and decoding are implemented in the String data type, which we have been using throughout the book. Nevertheless, it is often important for Java programmers to understand some basic facts about the underlying representation, as it can certainly affect the resource requirements of programs. For example, many programmers discovered that the memory usage of their programs suddenly doubled when Java switched from ASCII to Unicode in the 2000s, and began using a 16-bit char to encode each ASCII character. Experienced programmers know how to pack two ASCII characters per char to save memory when necessary.
Generally, it is wise to write programs that function properly independent of the data representation. Many programming languages fully support this point of view. Unfortunately, this approach can stand in direct opposition to the idea of taking full advantage of the capability of a computer, by using its hardware the way it was designed to be used. Java’s primitive types are intended to support this point of view. For example, if the computer has hardware to add or multiply 64-bit integers, then we would like each add or multiply operation to reduce to a single instruction so that our program can run as fast as possible. For this reason, it is wise for the programmer to try to match data types that have performance-critical operations with the primitive types that are implemented in the computer hardware. Achieving the actual match might involve deeper understanding of your system and its software, but striving for optimal performance is a worthwhile endeavor.
You have been writing programs that compute with various types of data. Our message in this section is that since every sequence of bits can be interpreted in many different ways, the meaning of any given sequence of bits within a computer depends on the context. You can write programs to interpret bits any way that you want. You cannot tell from the bits alone which type of data they represent, or even whether they represent data at all, as you will see.
To further emphasize this point, the table below gives several different 16-bit values, along with their values if interpreted as binary integers, hex integers, unsigned integers, two’s complement integers, binary16 floating-point numbers, and pairs of ASCII characters. These are but a few early examples of the myriad available ways of representing information within a computer.
A. You need to find out the name of its processor, then look for the specifications of that processor. Most likely, you have a 64-bit processor. If not, it may be time to get a new computer.
Q. Why does Java use 32 bits for int values when most computers have 64-bit words?
A. That was a design decision made a long time ago. Java is unusual in that it completely specifies the representation of an int. The advantage of doing so is that old Java programs are more likely to work on new computers than programs written in languages where machines might use different representations. The disadvantage is that 32 bits is often not enough. For example, in 2014 Google had to change from a 32-bit representation for its view count after it became clear that the video Gangham Style would be watched more than 2,147,483,647 times. In Java, you can switch to long.
Q. This seems like something that could be taken care of by the system, right?
A. Some languages, such as Python, place no limit on the size of integers, leaving it to the system to use multiple words for integer values when necessary. In Java, you can use the BigInteger class.
Q. What’s the BigInteger class?
A. It allows you to compute with integers without worrying about overflow. For example, if you import java.math.BigInteger, then the code
BigInteger x = new BigInteger("2");
StdOut.println(x.pow(100));
prints 1267650600228229401496703205376, the value of 2100. You can think of a BigInteger as a string (the internal representation is more efficient than that), and the class provides methods for standard arithmetic operations and many other operation. For example, this method is useful in cryptography, where arithmetic operations on numbers with hundreds of digits play a critical role in some systems. The implementation works with many digits as necessary, so overflow is not a concern. Of course, operations are much more expensive than built-in long or int operations, so Java programmers do not use BigInteger for integers that fit in the range supported by long or int.
Q. Why hexadecimal? Aren’t there other bases that would do the job?
A. Base 8, or octal, was widely used for early computer systems with 12-bit, 24-bit, or 36-bit words, because the contents of a word could be expressed with 4, 8, or 12 octal digits, respectively. An advantage over hex in such systems was that only the familiar decimal digits 0–7 were needed, so primitive I/O devices like numeric keypads could be used both for decimal numbers and octal numbers. But octal is not convenient for 32-bit and 64-bit word sizes, because those word sizes are not divisible by 3. (They are not divisible by 5 or 6 either, so no switch to a larger base is likely.)
Q. How can I guard against overflow?
A. It is not so easy, as a different check is needed for each operation. For example, if you know that x and y are both positive and you want to compute x + y, you could check that x < Integer.MAX_VALUE - y.
A. Another approach is to “upcast” to a type with a bigger range. For example, if you are calculating with int values, you could convert them to long values, then convert the result back to int (if it is not too big).
A. In Java 8, you can use Math.addExact(), which throws an exception on overflow.
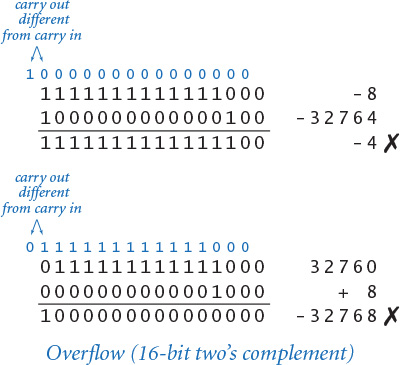
Q. How might hardware detect overflow for two’s complement addition?
A. The rule is simple, though it is a bit tricky to prove: check the values of the carry in to the leftmost bit position and the carry out of the leading bit position. Overflow is indicated if they are different (see the examples at right).
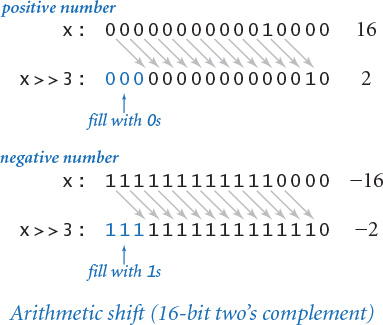
Q. What is the purpose of the arithmetic shift?
A. For two’s complement integers, arithmetic shifting right by 1 is the same as integer division by 2. For example, the value of (-16) >> 3 is -2, as illustrated at right. To test your understanding of this operator, figure out the values of (-3) >> 1 and (-1) >> 1. This convention is called “sign extension,” as opposed to “zero extension” for logical shifts.
Q. What is x >> y if y is negative or greater than 31?
A. Java uses only the five low-order bits of the second operand. This behavior coincides with the physical hardware on typical computers.
Q. I never really understood the examples in the Q&A in SECTION 1.2 that claim that (0.1 + 0.1 == 0.2) is true but (0.1 + 0.1 + 0.1 == 0.3) is false. Can you elaborate, now?
A. A literal like 0.1 or 0.3 in Java source code is converted to the nearest 64-bit IEEE 754 number (the one whose least significant bit is 0 in case of a tie), a Java double value. Here are the values for the literals 0.1, 0.2, and 0.3:

As you can see, 0.1 + 0.1 is equal to 0.2, but 0.1 + 0.1 + 0.1 is greater than 0.3. The situation is not so different from noticing that, for integers, 2/5 + 2/5 is equal to 4/5 (they are both 0), but 2/5 + 2/5 + 2/5 is not equal to 6/5.
Q. System.out.println(0.1) prints 0.1, not the value in the table on the previous page. Why?
A. Few programmers need that much precision, so println() truncates for readability. There must be at least one digit to represent the fractional part, and beyond that as many—but only as many—more digits as are needed to uniquely distinguish the argument value from adjacent values of type double. You can use printf() for more precise control over the format, and BigDecimal for extended precision. For example, if you import java.math.BigDecimal, then the code
double x = 0.1;
StdOut.println(new BigDecimal(x));
prints 0.1000000000000000055511151231257827021181583404541015625.
Solution. 1011100.
6.1.2 Convert the octal number 31415 to binary.
Solution. 011001100001101.
6.1.3 Convert the octal number 314159 to decimal.
Solution. That is not an octal number! You can do the computation, even with Convert, to get the result 104561, but 9 is just not a legal octal digit. The version of Convert on the booksite includes such legality checks. It is not unusual for a teacher to try this trick on a test, so beware!
6.1.4 Convert the hexadecimal number BB23A to octal.
Solution. First convert to binary 1011 1011 0010 0011 1010, then consider the bits three at a time 10 111 011 001 000 111 010, and convert to octal 2731072.
6.1.5 Add the two hexadecimal numbers 23AC and 4B80 and give the result in hexadecimal. Hint: Add directly in hex instead of converting to decimal, adding, and converting back.
6.1.6 Assume that m and n are positive integers. How many 1 bits are there in the binary representation of 2m+n?
6.1.7 What is the only decimal integer whose hexadecimal representation has its digits reversed?
Solution. 53 is 35 in hex.
6.1.8 Prove that converting a hexadecimal number one digit at a time to binary, and vice versa, always gives the correct result.
6.1.9 IPv4 is the protocol developed in the 1970s that dictates how computers on the Internet communicate. Each computer on the Internet needs it own Internet address. IPv4 uses 32-bit addresses. How many computers can the Internet handle? Is this enough for every mobile phone and every toaster to have its own?
6.1.10 IPv6 is an Internet protocol in which each computer has a 128-bit address. How many computers would the Internet be able to handle if this standard is adopted? Is this enough?
Solution. 2128. That at least enough for the short term—5,000 addresses per square micrometer of the Earth's surface!
6.1.11 Fill in the values of the expressions in this table:

6.1.12 Develop an implementation of the toInt() method specified in the text for converting a character in the range 0-9 or A-Z into an int value between 0 and 35.
Solution.
public static int toInt(char c)
{
if ((c >= '0') && (c <= '9')) return c - '0';
return c - 'A' + 10;
}
6.1.13 Develop an implementation of the toChar() method specified in the text for converting an int value between 0 and 35 into a character in the range 0-9 or A-Z.
Solution.
public static char toChar(int i)
{
if (i < 10) return (char) ('0' + i);
return (char) ('A' + i - 10);
}
6.1.14 Modify Convert (and the answers to the previous two exercises) to use long, test for overflow, and check that the digits in the input string are within the range specified by the base.
Solution. See Convert.java on the booksite.
6.1.15 Add to Convert a version of the toString() method that takes a third argument, which specifies the length of the string to be produced. If the specified length is less than needed, return only the rightmost digits; if it is greater, fill in with leading 0 characters. For example, toString(64206, 16, 3) should return "ACE" and toString(15, 16, 4) should return "000F". Hint: First call the two-argument version.
6.1.16 Compose a Java program TwosComplement that takes an int value i and a word size w from the command line and prints the w-bit two’s complement representation of i and the hex representation of that number. Assume that w is a multiple of 4. For example, your program should behave as follows:
% java TwosComplement -1 16
1111111111111111 FFFF
% java TwosComplement 45 8
00101101 2D
% java TwosComplement -1024 32
11111111111111111111110000000000 FFFFFC00
6.1.17 Modify ExtractFloat to develop a program ExtractDouble that accomplishes the same task for double values.
6.1.18 Write a Java program EncodeDouble that takes a double value from the command line and encodes it as a floating-point number according to the IEEE 754 binary32 standard
6.1.19 Fill in the blanks in this table.
6.1.20 Fill in the blanks in this table.
6.1.21 IP addresses and IP numbers An IP address (IPV4) consists of integers w, x, y, and z and is typically written as the string w.x.y.z. The corresponding IP number is given by 16777216w + 65536x + 256y + z. Given an IP number n, the corresponding IP address is derived from w = (n / 16777216) mod 256, x = (n / 65536) mod 256, y = (n / 256) mod 256, z = n mod 256. Write a function that takes an IP number and returns a String representation of the IP address. and another function that takes an IP address and returns a int corresponding to the IP number. For example, given 3401190660, the first function should return 202.186.13.4.
6.1.22 IP address. Write a program that takes a 32-bit string as a command-line argument and prints the corresponding IP address in dotted decimal form. That is, take the bits 8 at a time, convert each group to decimal, and separate each group with a dot. For example, the binary IP address 010100000001000000000000000000 01 should be converted to 80.16.0.1.
6.1.23 MAC address. Write functions to convert back and forth between MAC addresses and 48-bit long values.
6.1.24 Base64 encoding. Base64 encoding is a popular method for sending binary data over the Internet. It converts arbitrary data to ASCII text, which can be emailed back between systems without problems. Write a program to read in a arbitrary binary file and encode it using Base64.
6.1.25 Floating-point software. Write a class FloatingPoint that has three instance variables sign, exponent, and fraction. Implement addition and multiplication. Include toString() and parseFloat(). Support 16-, 32-, and 64-bit formats.
6.1.26 DNA encoding. Develop a class DNA that supports an efficient representation of strings that are composed exclusively of A, T, C, or G characters. Include a constructor that converts a string to the internal representation, a toString() method that converts the internal representation to a string, a charAt() method that returns the character at the specified index, and an indexOf() method that takes a String pattern as an argument and returns the first occurrence of pattern in the represented string. For the internal representation, use an array of int values, packing 16 characters in each int (two bits per character).
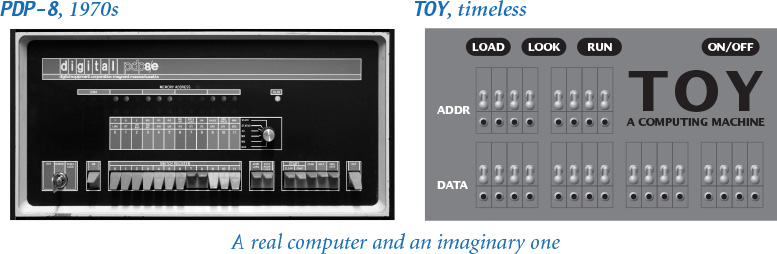
To help you better understand the nature of computation on your computer, we introduce in this section TOY, an imaginary machine designed for this book that is very similar to the computers that first came into widespread use in the 1970s. We study it today because it also shares the essential characteristics of the modern day microprocessors found in your mobile device and your computer and everywhere else, not to mention countless other computing devices developed in the intervening years. The figure at the bottom of this page depicts a PDP-8, a real computer from the 1970s, and TOY, our imaginary computer.
Programs in this section
TOY demonstrates that simple computational models can perform useful and nontrivial calculations, and also serves a reference point that can help you understand the basic characteristics of your own computer. One of the remarkable facts of the evolution of computation over the past several decades is that all computers share the same basic architecture, an approach that was widely adopted almost immediately after it was first articulated by John von Neumann in 1945.
We begin by introducing the basic constituent parts of the TOY machine. There are only a few, and the purpose of each is easy to understand. All computers are made up of similar components.
Then we describe how to use and program the TOY machine. Starting with the basic ways of representing information that we covered in the previous section, we look at operations on such information. In other words, we are working with the data types that the TOY machine hardware implements: sets of values and operations on those values. Working at this level is known as machine-language programming. Studying programming at the machine language level will help you better understand the relationship between your Java programs and your computer, as well as the nature of computation itself. Machine-language programming is actually still used today in performance-critical applications such as video processing, audio processing, and scientific computing. As you will see, it is not difficult to learn how to program in machine language.
In CHAPTER 7, we describe how to build such a machine in hardware. This will be the final step in demystifying your computer, helping you to better understand the connection between your Java programs and the physical world.
This essential layer of abstraction is found in all computers. A complete description of precisely what a processor can do provides a target language for translating a program written in a high-level language like Java while at the same time providing a blueprint for building a circuit that can implement the machine.
It is perhaps a bit difficult for you to imagine a modern world without computers. To pick a point in time, consider the 1950s, when the world was becoming industrialized after World War II. At that time, there were cars, airplanes, satellites, and all sorts of other technological developments that are recognizable today, but there were no computers available to the average person or even the average scientist or engineer.
The original motivation for building computers was to be able to perform calculations for applications of all sorts in science, engineering, and commerce. World War II itself proved the point, from the ballistics tables computed by John von Neumann to the code-breaking machine developed by Alan Turing, not to mention the calculations done at Los Alamos that enabled the development of the atomic bomb. And imagine running a bank or building a car without a computer.

The most important tool used for calculations by a typical science or engineering student before the 1970s was the slide rule, a decidedly non-electronic and non-digital device that nonetheless was very useful, particularly for computing logarithms and doing multiplications. Another tool in common use was a book of tables of functions; for example, to compute sin(x), you would look it up in the book!
Once computers did start to become available, they were generally shared by a group of people and were cumbersome to use, as you will see. Still, it was immediately apparent that computing would be a vast improvement over slide rules and function tables. Within a very short amount of time, people were sharing large computers in ways that made slide rules and tables of functions obsolete. For many years people used calculators, based on the same technology as computers but specialized for calculations, and handheld. For simple calculations, calculators persist.
For complex calculations, scientists, engineers, and applications developers wrote computer programs, then as now. It is quite remarkable that the basic design of the first devices that were created for such purposes has persisted to the present day and still supports the ocean of applications that have transformed the world.
We begin with an overview of the basic design components that have been found in virtually all computers for more than half a century, but are reduced to their essentials in our TOY machine.
The memory is a critical component of any computer. It holds not only data to be processed and the results of the computation, but also any program that the machine is to run. TOY’s memory consists of 256 words, each 16 bits. That certainly is not much by today’s standards, but you will be surprised at the range of calculations it can support. And here is a sobering thought: Those 256 × 16 = 4,096 bits have 24,096 different possible values, so the vast majority of things that TOY can do will never be observed in this universe.
0_ 1_ 2_ 3_ 4_ 5_ 6_ 7_ 8_ 9_ A_ B_ C_ D_ E_ F_
_0 7A10 8A15 8A2B 7101 7101 7800 8AFF 7101 7101 BB0E 0000 0000 0000 0000 0000 0000
_1 7BEF 8B16 8B2C 75FF 7A00 8CFF 8BFF A90A A90A 1EE1 0000 0000 0000 0000 0000 0000
_2 9AFF 1CAB 2CAB 7901 7B01 CC55 7101 140A 180A 900E 0000 0000 0000 0000 0000 0000
_3 9BFF 9C17 CC29 2C59 894C 188C 7900 7B00 C98F 1EE1 0000 0000 0000 0000 0000 0000
_4 7101 0000 DC27 CC3B C94B C051 22B9 C97C AC09 900E 0000 0000 0000 0000 0000 0000
_5 7900 0008 2BBA 1991 9AFF 98FF C26B 2991 2CBC 1EE1 0000 0000 0000 0000 0000 0000
_6 22B9 0005 C022 1A09 1CAB 0000 1CA9 2441 CC96 EF00 0000 0000 0000 0000 0000 0000
_7 C200 0000 EF00 8B3D 1AB0 0000 8DFF AC04 1991 0000 0000 0000 0000 0000 0000 0000
_8 1CA9 0000 0000 FF22 1BC0 0000 BD0C 2EBC 1809 0000 0000 0000 0000 0000 0000 0000
_9 AD0C 0000 00C3 2AA1 2991 0000 1991 DE7B A909 0000 0000 0000 0000 0000 0000 0000
_A 9DFF 0000 0111 CA36 C044 0000 C064 1B0C DCBE 0000 0000 0000 0000 0000 0000 0000
_B 1441 0000 0000 9B3E 0000 0000 1AA9 C074 1981 0000 0000 0000 0000 0000 0000 0000
_C C006 0000 0000 0000 000C FF60 BB0A EF00 1809 0000 0000 0000 0000 0000 0000 0000
_D 0000 0000 0000 005B 0000 FF70 EF00 0000 A909 0000 0000 0000 0000 0000 0000 0000
_E 0000 0000 0000 0000 0000 9BFF 0000 0000 C083 0000 0000 0000 0000 0000 0000 0000
_F 0000 0000 0000 0000 0000 0000 0000 0000 BE08 0000 0000 0000 0000 0000 0000 0000
TOY memory dump (256 16-bit words)
With hex notation, we can specify the contents of a memory word with 4 hex digits. Furthermore, we consider the words to be numbered from 0 to 255, so that we can refer to each word with 2-digit hex number known as its address. For example, we might say that “the value of the word at address 1E is 0FA2” or just “memory location 1E is 0FA2.” For economy, we often just use array notation and say that “M[1E] is 0FA2.” We can specify the contents of the TOY memory using a 16-row table like the one at the bottom of the previous page. The first column gives values for locations 00 to 0F; the second column gives values for locations 10 to 1F, and so forth. Such a table is known as a memory dump. In this case, the memory contains all the programs that we consider in this chapter (!)
A critical characteristic of the TOY machine (and virtually all other computers) is that the contents of a memory word might be interpreted either as data or as an instruction, depending on the context. For example, you know from the previous section that the value 1234 might be interpreted as representing the integer 466010 or the real number 0.00302886962890625; in this section you will learn that it might also represent a machine instruction that adds two numbers. It is up to the programmer to ensure that data is treated as data, and that instructions are treated as instructions. We will examine how all TOY instructions are encoded shortly, so that you will know how to decode any 16-bit value as an instruction (and how to encode any instruction as a 16-bit value).
A register is a machine component that holds a sequence of bits, much like a word in main memory. Registers serve the function of holding intermediate results during computation. You can think of them as playing the role of variables in TOY programming. TOY has 16 registers, numbered from 0 through F. As with memory, we use array notation and refer to the registers with the designations R[0] through R[F]. Since they are 16 bits, the same as memory words, we represent the contents of each register with a 4-digit hex value, and the contents of all the registers with a table of 16 4-digit hex numbers. The table at right shows the contents of the registers during a typical computation, which we examine later. By convention, R[0] is always 0000.
R[0] 0000
R[1] 0001
R[2] 000A
R[3] 0000
R[4] 0000
R[5] 0000
R[6] 0030
R[7] 0000
R[8] 003A
R[9] 0000
R[A] 0A23
R[B] 0B44
R[C] 0C78
R[D] 0000
R[E] 0000
R[F] 0000
TOY registers
The arithmetic logic unit (ALU) is TOY’s computational engine—the workhorse of the machine that performs all its calculations. Typically, a TOY instruction directs the ALU to compute some function that takes two registers as arguments and put the result in a third register. For example, the TOY instruction 1234 says to direct the contents of R[2] and R[3] to the ALU, add them, and then direct the result to R[4]. Later in this section, we will describe how to compose TOY programs based upon such instructions.
The 8-bit program counter (PC) is an internal register that holds the address of the next instruction to be executed. The 16-bit instruction register (IR) is an internal register that contains the current instruction being executed. These registers are central to the operation of the machine. The IR is not directly accessed by programs, but programmers are always aware of its contents.
The diagram at the bottom of this page is a schematic that includes these basic components. In Chapter 7, we will consider how to create a circuit that implements all of them. For the rest of this chapter, we will consider how they operate and how a programmer can control them to get them to perform a desired computation.
The TOY machine executes instructions by taking a specific sequence of actions, repeatedly. First it checks the value of the PC and fetches (copies) the contents of this memory location into the IR. Next, it increments the program counter by 1. (For example, if the program counter is 10, it gets incremented to 11.) Finally, it interprets the 16-bit value in the IR as an instruction and executes it according to the rules that characterize the TOY machine, which we will describe shortly. Each instruction can modify the contents of various registers, main memory, or even the program counter itself. After executing the instruction, the machine repeats the whole fetch–increment–execute cycle, using the new value of the program counter to find the next instruction. This process continues forever, or until the machine executes a halt instruction. As with Java, it is possible to write programs that go into infinite loops. To stop the TOY machine in an infinite loop, a programmer would have to turn it off, or perhaps even to unplug it.
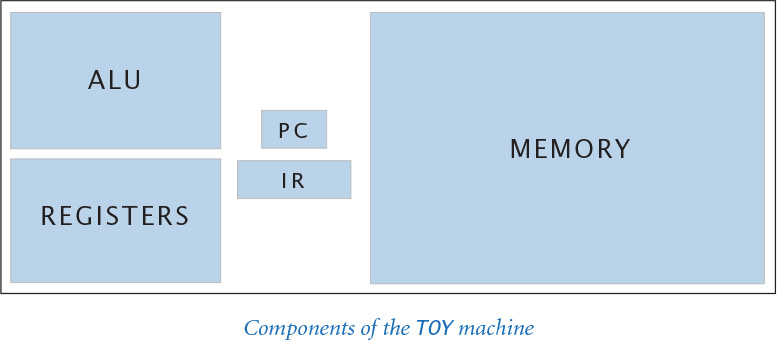

Any 16-bit value (the contents of any memory word) can be interpreted as a TOY instruction. The purpose of each instruction is to modify the state of the machine (the value of a memory word, a register, or the PC) in some way. To describe the operation of the instructions, we use pseudo-code, which is much like Java code except that it refers to memory words, registers, and the PC directly.
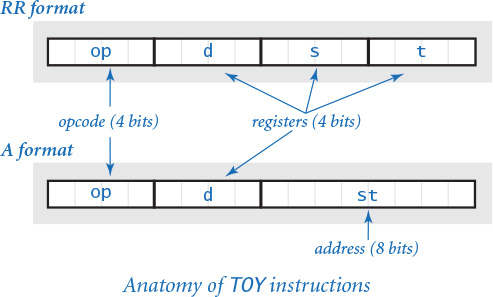
We use hex to encode instructions: each 16-bit instruction is four hex digits. The first digit of an instruction is its opcode, which specifies the operation it performs. There are 16 different instructions, so one hex digit suffices to specify one of them. The second digit of an instruction specifies a register—each instruction uses or changes the value of some register. Since there are 16 registers, one hex digit suffices to specify one of them. Most of the instructions are coded in one of two instruction formats, which tell us how to interpret the third and fourth hex digits. In RR-format instructions, each of the two remaining hex digits refers to a register. In A-format instructions, the third and fourth hex digits (together) specify a memory address.
On the next page is a table that describes all of TOY’s instructions. This table is a complete reference guide to programming in TOY, to be consulted when you compose TOY programs. Next, we describe the instructions in detail.
Opcode 0, the most basic instruction, simply directs the machine to halt—that is, to stop the fetch–increment–execute cycle. At this point, the programmer can examine the contents of memory to see the results of the computation. TOY ignores the other three hex digits of a halt, so 0000, 0123, and 0FFF are all halt instructions.
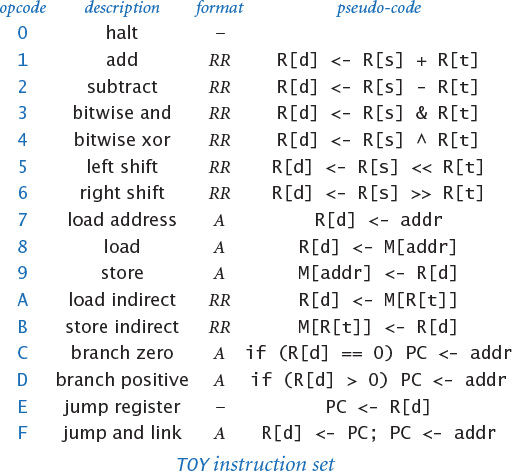
Opcodes 1 and 2 are arithmetic instructions, which invoke the ALU to perform an arithmetic operation on two registers (R[s] and R[t]), putting the result in a third register (R[d]). For example, the instruction 1234 means “add R[3] to R[4] and put the result in R[2]” and 2AAC means “subtract R[C] from R[A] and put the result in R[A].” These instructions might be said to implement TOY’s integer data type: the set of values is the 16-bit integers and the operations are add and subtract.
Opcodes 7, A, and B are memory address instructions, which we use to manipulate addresses in TOY. For example, the instruction 7423 means “set R[4] to the value 0023” or just R[4] = 0023 (note the leading 0s). Then opcodes A and B can be used to reference memory indirectly via the address in a register. Understanding these instructions is a helpful way to better understand references in Java. We will examine their use in more detail later when we look at implementing arrays and linked structures.
Another important use of opcode 7 is as an integer-data-type instruction: once the bits are loaded into the register, we can use them in an arithmetic instruction (interpret them as representing an integer). For example, we use the instruction 7C01 to set R[C] to 0001 (R[C] = 0001).
Opcodes 3 through 6 are logical instructions, which invoke the ALU to perform operations on the bits in the registers, like the operations that we considered for Java in SECTION 5.1. Opcode 3 is “bitwise and,” where each bit in R[d] is set to 1 if the corresponding bits in R[s] and R[t] are both 1; otherwise, it is set to 0. Similarly, opcode 4 is “bitwise xor,” where each bit in R[d] is set to 1 if the corresponding bits in R[s] and R[t] are different; otherwise, it is set to 0. Opcode 5 leaves in R[d] the result of shifting the bits in R[s] left by the number of bit positions given in R[t], discarding the bits shifted out and shifting in 0 bits as needed. Opcode 6 is similar, but bits are shifted right and the bits shifted in match the sign bit (see the Q&A in SECTION 6.1). The logical instructions complete the implementation of TOY’s int data type in a manner that corresponds to Java. In TOY, as in Java, we sometimes bend data abstraction rules by treating the values just as sequences of 16 bits, rather than as integers. Shift and bitwise logical instructions are useful in implementing and decoding all types of data, just as in Java code.
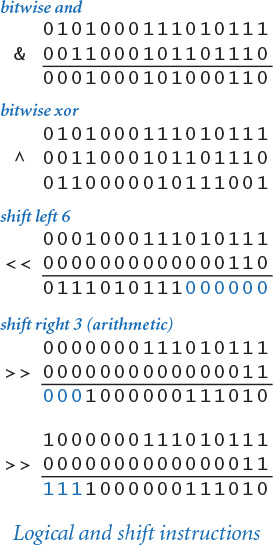
Opcodes 8 and 9 are memory instructions, which transfer data between memory and the registers. For example, the instruction 8234 means “load into R[2] the value of memory word M[34],” or R[2] = M[34] for short; and the instruction 9234 means “store into memory word M[34] the value of R[2],” or M[34] = R[2].
Opcodes C through F are flow of control instructions, which modify the PC and are essential for implementing flow-of-control constructs like conditionals, loops, and functions that are fundamental in programming. For example, the instruction C212 means “set the PC to 12 if R[2] is 0” and D212 means “set the PC to 12 if R[2] is positive.” Note in particular that C0xx means “set the PC to xx,” since R[0] is always zero. This operation is known as an unconditional branch. Changing the value of the PC has the effect of changing the flow of control because the next instruction is always taken from the memory address given by the PC. We will examine opcodes E and F in more detail later when we look at implementing functions.
Your first reaction to this set of instructions might be that it is minimal at best. That is certainly true, but one of the goals of this chapter is to convince you that a small set of instructions like this suffices to write programs equivalent to the Java programs that you learned in the first half of this book, or any program. For the moment, the most important thing to remember is that you now have the information you need to decode any 16-bit value as a TOY instruction.
“Hello, World” for TOY is a program that adds two integers, shown in PROGRAM 6.2.1 on the opposite page. As with HelloWorld.java, in SECTION 1.1, we start with such a simple program to allow us to focus on the details of running the program. The code in PROGRAM 6.2.1, known as machine code, illustrates the various conventions that we use for TOY programs:
• All data and code relevant to a given program are included.
• Each line gives a 2-digit (hex) memory address and the 4-digit (hex) value of the word at that address.
• The starting value for the PC is always the address of the first instruction, highlighted in blue.
• The third column gives pseudo-code for each instruction.
The program itself is just the five 4-digit hex numbers stored in memory locations 10-14. The pseudo-code makes this program very easy to understand—it reads much like a Java program.
To trace a TOY program, we simply write down the PC and IR values for each instruction executed and the value of any affected register or memory word after execution. The table below the code gives such a trace for PROGRAM 6.2.1. To specify the result of the computation, we list the contents of memory when the halt instruction is reached, with the halt instruction itself and any memory locations whose values have changed highlighted in blue. In this case, only one memory value changes: location 17 gets the computed result 000D.
This process seems exceedingly simple, but we still have not described the process of actually getting the program to run. For Java, we were able to describe how you would use an editor to create a file containing the program, then use a compiler and the Java Virtual Machine to execute it and view the results in the terminal window. For TOY, you have to consider that there is no operating system, no applications, certainly no editor, terminal emulator, compiler, or runtime—not even a keyboard or a display.
Indeed, the picture at the bottom of the facing page shows the “result” of running PROGRAM 6.2.1: the lights at the bottom of the front panel of the computer display the computed result 000D, in binary—0000000000001101. Next, we consider, step by step, the process of getting this program to run on the TOY machine and to achieve this result.
Program 6.2.1 Your first TOY program
20: 8A15 R[A] <- M[15] load first summand into a
11: 8B16 R[B] <- M[16] load second summand into b
12: 1CAB R[C] <- R[A] + R[B] c = a + b
13: 9C17 M[17] <- R[C] store result
14: 0000 halt
15: 0008 integer value 810
16: 0005 integer value 510
17: 0000 result
Started with the PC at 10, this program adds the two numbers at memory locations 15 and 16 and puts the result 000D in memory location 17.
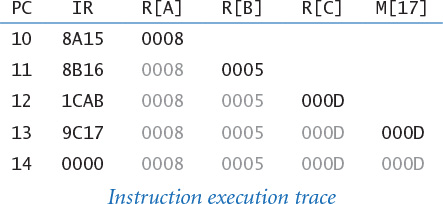
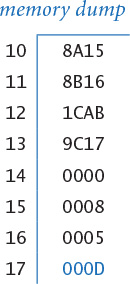
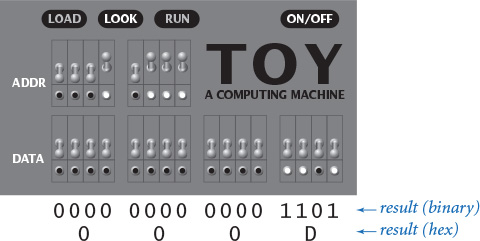
You communicate with your computer though I/O devices like the keyboard, display, and trackpad. TOY has I/O devices, too—in a sense. Next, we describe how programmers would communicate with machines like TOY, to actually run programs. At left is a depiction of the front panel of our imaginary TOY machine. It has just three simple devices for control, input, and output: pushbuttons, switches, and lights. All of them are simple on/off mechanisms, but there are very few of them: just 24 switches and lights and just 4 pushbuttons. Nothing else. No keyboard, printer, or display. No Internet connection, wireless card, speakers, or touchpad. Just buttons for control, switches for input, and lights for output. Still, this is enough to perform worthwhile computations with a general-purpose computer with the same basic characteristics as your own, as we now describe.
Perhaps the most basic control for a computer is to turn it on or off. The PDP-8 had a key for this purpose; TOY has a pushbutton. The first thing a programmer would do is to turn the machine on (and the last thing would be to turn it off). Additionally, three other basic functions are controlled by pushbuttons:
• Load a word into the computer’s memory.
• Look at the value of a word in the computer’s memory.
• Run a program.
We will discuss each of these functions in context shortly.
Programmers using such machines specify binary values with on/off switches. A switch in the up position denotes 1; a switch in the down position denotes 0. The TOY machine has two banks of switches: an 8-switch bank for specifying a location in the memory and a 16-switch bank for specifying a memory-word value. These switches are TOY’s input devices.
TOY’s output devices are the banks of lights under the switches. Again, an 8-light bank specifies a location in the memory and a 16-light bank specifies a memory-word value.
To run a program on a machine such as TOY, a programmer would typically reserve time with the machine and show up at the appointed time with the program written down on a piece of paper. To fix ideas, we consider in full detail the steps needed to run our first program. For brevity, we “think in hex” by specifying hex values for switches and lights, when in reality each switch or light corresponds to a bit. For example, when we say “set the DATA switches to 1CAB” we mean “turn on the DATA switches corresponding to 1s in the bitstring 0001110010101011.” That said, here is how a programmer would implement and run PROGRAM 6.2.1:
• Turn on the machine (press the ON/OFF button).
• Set the ADDR switches to 10 and the DATA switches to 8A15, then press LOAD.
• Set the ADDR switches to 11 and the DATA switches to 8B16, then press LOAD.
• Set the ADDR switches to 12 and the DATA switches to 1CAB, then press LOAD.
• Set the ADDR switches to 13 and the DATA switches to 9C01, then press LOAD.
• Set the ADDR switches to 14 and the DATA switches to 0000, then press LOAD.
• Set the ADDR switches to 15 and the DATA switches to 0008, then press LOAD.
• Set the ADDR switches to 16 and the DATA switches to 0005, then press LOAD.
• Set the ADDR switches to 10, then press the RUN button.
• Set the ADDR switches to 17, then press the LOOK button.
• Write down the computed answer, shown in the DATA lights (000D).
• (Typically) repeat the previous five steps with other data values.
• Turn off the machine (press the ON/OFF button).
In summary, when we turn the machine on, we cannot assume anything about the values in the memory, registers, and PC (except that R[0] is 0000), so we need to load the program and the data (the seven steps after turning the machine on) before we can run the program. After running the program, we need to examine the memory location containing the result to learn the answer.
It is worthwhile to reflect on the truly fundamental nature of this interface. Essentially, programmers would communicate with the machine one bit at a time. Crude as this process was, people put up with it because developing programs was far superior to doing calculations with pencil and paper, slide rules, or mechanical calculators, the only other widely available alternatives at the time. We will soon see many examples where short programs yield computed values that would otherwise be very difficult to learn.
Better input/output devices such as keyboards, printers, paper tapes, and magnetic tapes soon followed, of course, but this method of programming was certainly a starting point for many scientists, engineers, and students (yes, this is how students at universities would learn to program in the early 1970s).
To consider increasingly interesting TOY programs, we are following a similar approach to the one we used when you first learned programming, in CHAPTER 1. We have considered data types and basic operations in our description of machine instructions; now we move to control constructs.
The first control flow constructs that you learned in CHAPTER 1 were conditionals and loops. Accordingly, we next consider implementations of these constructs with TOY’s branch statements.
As an example, we consider Euclid’s algorithm for computing the greatest common divisor (gcd) of two positive integers a and b. We studied a version of this algorithm in SECTION 2.3 that is based on integer division (with remainder). Since TOY has no division instruction, we will start with the following version, implemented in Java:
public static int gcd(int a, int b)
{
while (a != b)
if (b > a) b = b - a;
else a = a - b;
return a;
}
This code is based on a simple idea: if b is greater than a, any number that divides both a and b also divides both a and b - a (in particular, the gcd); and if a is greater than b, any number that divides both a and b also divides both b and a - b. When a and b are positive, each iteration of the loop decreases the larger of the two (but it stays positive), so the process must eventually end with a and b equal—to the gcd of all the numbers encountered, including the original a and b. A trace of the values of a and b for sample inputs is shown at right.
|
|
|
|
7215 |
6123 |
|
1092 |
6123 |
|
1092 |
5031 |
|
1092 |
3939 |
|
1092 |
2847 |
|
1092 |
1755 |
|
1092 |
663 |
|
429 |
663 |
|
429 |
234 |
|
195 |
234 |
|
195 |
39 |
|
156 |
39 |
|
117 |
39 |
|
78 |
39 |
|
39 |
39 |
|
Trace of Euclid’s algorithm |
|
Euclid’s algorithm was first articulated more than 2,000 years ago, and many versions of it have been studied since. This particular version can sometimes be slow: for example, you may have noticed in the trace that 1,092 is subtracted six times before a becomes less than b. (Taking the remainder accomplishes the same task with one division.) If one of the numbers is very small, then the algorithm can take time proportional to the magnitude of the other. For example, the algorithm takes 7,214 iterations to find that the greatest common divisor of 7,215 and 7,214 is 1. Rest assured that versions of Euclid’s algorithm that are much more efficient than this have been studied in quite some detail, even for machines like TOY (see EXERCISE 6.2.19).
For the moment, we will concentrate on implementing the code in the body of this function, assuming that the programmer will enter the input data in specified memory locations, as in PROGRAM 6.2.1. In the next section, we will discuss how to package the code as a function.
The key to the implementation is effective use of TOY’s branch statements to implement loops and conditionals, as illustrated by the diagrams on this page.
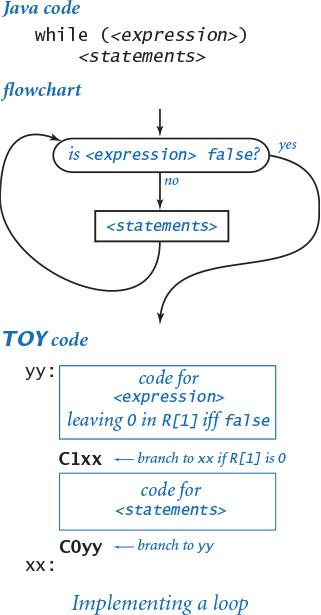
To implement a while loop (diagram at right), we put the code that computes the value of the expression starting at some memory location yy and implement the loop with the instruction C0yy, an unconditional branch to yy. Within the loop, we put the code for evaluating the expression, arranging that it leave zero in some register (say R[1]) if and only if the value is false. Then we use the conditional branch C0xx to transfer control to the instruction after the loop (at address xx) if the register is zero. The implementation of an if statement, illustrated at left, is similar.
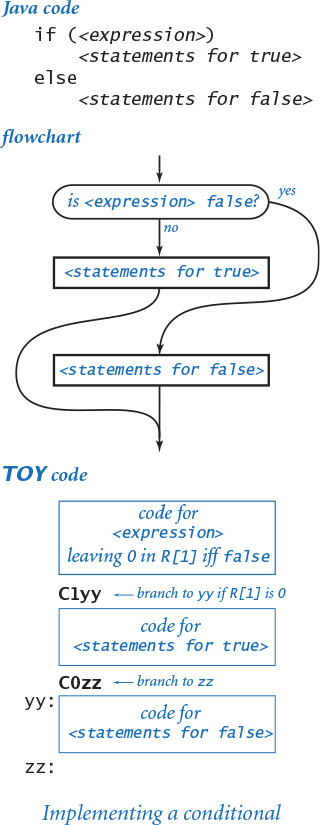
From these constructions, it is clear that any loop or conditional in a Java program can be directly implemented in a TOY program. Each line of Java code corresponds to just a few TOY branches. As further evidence, several of the exercises at the end of this section address implementations of Java programs that you learned early in this book. As with Java, conditionals and loops take us from a world of programming where we execute only a few instructions to one where we can execute thousands or millions of instructions, or more.
With TOY programs, we are not even limited to these ways of implementing conditionals and loops. For example, the implementation in PROGRAM 6.2.2 actually happens to evaluate just one conditional expression for both the while loop and the if statement. Indeed, programmers can use branch instructions to set up flow-of-control structures in TOY that cannot be naturally expressed with conditionals and loops. It took many years for people to become comfortable with the idea that it is best to use just the few building blocks (conditionals, loops, and nesting) that we use in modern programming. For clarity, we take a middle-of-the road approach in this book, where we are guided by the constructs just considered (and we use Java-like code as documentation), but we take shortcuts that simplify the code when appropriate.
Thus, a programmer could use the switches to enter PROGRAM 6.2.2 and its data in memory locations 20 through 2D, then set the address switches to 20, press RUN, and observe the result in the lights by examining location 2D. The program computes the gcd of 195 and 273, which is 39. The programmer could run the program as often as desired, entering new pairs of numbers in 2B and 2C, resetting the address switches to 20, pressing RUN, and observing the result in 2D.
Following the trace is a worthwhile way to develop more comfort with TOY programming. First, the program loads 195 (00C3) into R[A] and 273 (0111) into R[B]. Then it subtracts them, putting the result –78 (FFC3) into R[C]. Since this value is not zero, it enters the loop, and then tests whether the difference is negative or positive. Since it is negative, it subtracts R[A] from R[B], leaving 78 (004E) in R[B], and then goes back for another iteration of the loop. In the next iteration of the loop, it subtracts R[B] from R[A], leaving 117 (0075) in R[A]. Then it subtracts R[B] from R[A] again, leaving 39 (0027) in R[A]. The last iteration of the loop subtracts R[A] from R[B], leaving the result 39 (0027) in both registers.
This is a classic computation, and we can imagine the excitement experienced by early programmers upon realizing that such computations could so easily be relegated to the computer. Would anyone rather perform such computations by hand? The ability to quickly implement algorithms like this appealed to the mathematicians and scientists who became early programmers, stimulated the search for faster algorithms, and unleashed research into developing efficient algorithms that continues to this day.
Program 6.2.2 Conditionals and loops: Euclid’s algorithm
20: 8A2B R[A] <- M[2B] a = p
21: 8B2C R[B] <- M[2C] b = q
22: 2CAB R[C] <- R[A] - R[B] while (a != b)
23: CC29 if (R[C] == 0) PC <- 29 {
24: DC27 if (R[C] > 0) PC <- 27 if (b > a)
25: 2BBA R[B] <- R[B] - R[A] b = b - a
26: C022 PC <- 22 else
27: 2AAB R[A] <- R[A] - R[B] a = a - b
28: C022 PC <- 22 }
29: 9A2D return a (= b = GCD) return a
2A: 0000 halt
2B: 00C3 integer value 19510 p
2C: 0111 integer value 27310 q
2D: 0000 result
Started with the PC at 20, this program finds the greatest common divisor of the two numbers at memory locations 2B and 2C and puts the result in memory location 2D.

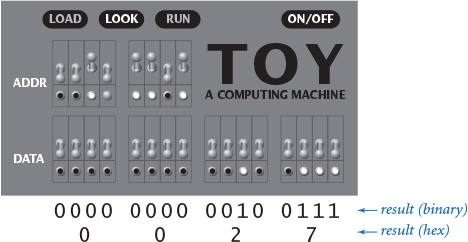
One of the essential characteristics of the TOY machine is that it stores computer programs as numbers, and both data and programs are stored in the same main memory. This is a profound idea with a fascinating history that is crucial to understanding the basic nature of computation.
As an illustration of the fundamental idea, consider PROGRAM 6.2.3, which adds a sequence of numbers. The sequence could be of any length, terminated by 0000. A trace of the operation of this program is shown at right, and is worthy of careful study (R[1] and M[1B] are omitted from the trace because each of their values changes only once). The computation starts out in a manner similar to PROGRAM 6.2.1, but then does something quite different. After adding the first two numbers, and leaving the result in R[A], the program loads the instruction 8B1D at location 12 into R[D], adds 1 to it, then stores the result 8B1E back into location 12. Then, it branches back to location 12, where that instruction loads into R[B] the next number to be added to R[A], continuing in a loop until it encounters 0000 in the data.
Such code is known as self-modifying code. We have included this program because it succinctly illustrates the fundamental concept of stored-program computing. Is the content of memory location 12 an instruction or data? It is both! When we add 1 to it, it is data, but when the PC refers to it and it is loaded into the IR, it is an instruction. Since the program and data share the same memory, the machine can modify its data or the program itself while it is executing. That is, code and data are the same, or at least they can be. The memory is interpreted as an instruction when the program counter references it, and as data when an instruction references it.
Self-modifying code liked this is rarely used in modern computing because it is difficult to understand, debug, and maintain. We will consider an alternative method of adding a sequence of numbers in the next section. But the ability to process instructions as data is fundamental in computing, as discussed next and throughout the rest of this chapter.
On reflection, you can see that the ability to treat the program as data is crucial and essential in our modern computational infrastructure:
• Any application is treated as data while you are downloading or installing it, but as a program once you launch it.
• Compilers are programs that read in other programs as input data and produce machine-language programs as output data, so all programming languages depend on this capability.
• Modern cloud computing is based on the concept of a virtual machine, where one computer runs a program written for another computer. Indeed, TOY itself is a virtual machine, as you will see in SECTION 6.4.
Program 6.2.3 Self-modifying code: Compute a sum
10: 7101 R[1] <- 0001
11: 8A1C R[A] <- M[1C] load first number into a
12: 8B1D R[B] <- M[1D] while (b != 0)
13: CB19 if (R[B]==0) PC <- 19 {
14: 1AAB R[A] <- R[A] + R[B] a = a + b
15: 8D12 R[D] <- M[12] modify instruction at M[12]
16: 1D1D R[D] <- R[D] + 1 to load next number into
17: 9D12 M[12] <- R[D] b on next iteration
18: C012 PC <- 12 }
19: 9A1B store result
1A: 0000 halt
1B: 0000 result
1C: 0001 data
1D: 0008 integer value 810
1E: 001B integer value 2710
1F: 0040 integer value 6410
20: 0000
Started with the PC at 10, this program adds the sequence of numbers at memory locations 1C through 1F (terminated by 0000) and stores the result in memory location 1B.
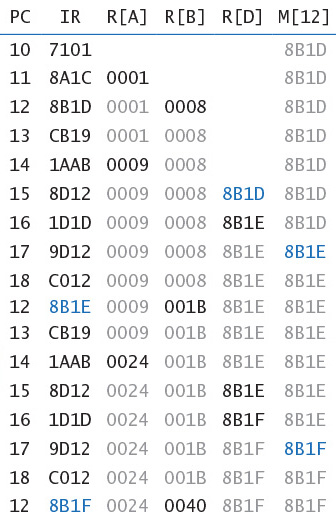

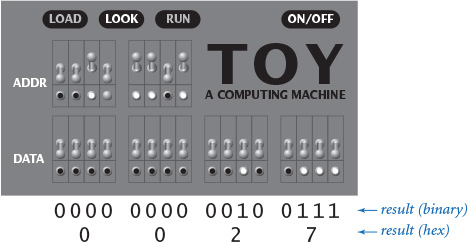
These are but a few examples, and we will be revisiting this concept throughout this chapter.
Treating programs as data is not without its perils. For example, computer viruses are (malicious) programs that propagate by writing new programs or modifying existing ones. And, as we saw in CHAPTER 5, it is a consequence of Turing’s theory that there is no effective way in general to tell the difference between a malicious virus, a useful application, or data. This practical downside is an inescapable consequence of the stored-program model. We will examine a specific example in the context of our TOY machine in the next section.
As already mentioned, by the 1940s and 1950s scientists and engineers were performing extensive calculations, not just for wartime applications such as ballistics, atomic weapons and cryptography, but also for peacetime applications like space flight and meteorology. The idea that electronic components could be much faster than mechanical ones was a powerful one.
Many early computers, however, emulated mechanical calculators. Operators had to “program” the computer by plugging cables and setting banks of switches, which was tedious, time-consuming, and error-prone. Any memory was devoted to data. One such machine was the ENIAC, being developed in the mid-1940s at the University of Pennsylvania by Eckert and Mauchly.
At the same time (actually a bit earlier, in the 1930s) there was great excitement in the field of mathematics because Alan Turing had developed the ingenious theoretical constructs that we just considered in CHAPTER 5. Turing’s work provided deep insights into the true nature of computation.
Princeton scholar John von Neumann worked as a consultant with Eckert and Mauchly on the ENIAC project and its planned successor, the EDVAC. He was interested both in the ballistics calculations that were the primary purpose of the machine and in the extensive calculations that were needed for the development of the atom bomb.
In 1945, while on a train from Princeton to Los Alamos, von Neumann wrote up his report on planned improvements to ENIAC. This memo, First Draft of a Report on the EDVAC, is a complete description of the stored-program model of computing. Since von Neumann was a professor at Princeton while Turing was a graduate student there, he certainly was influenced by Turing’s ideas, and he was in a unique position to bridge the gap between Turing’s theories and the practical challenges faced by Eckert and Mauchly. Soon after von Neumann’s arrival at Los Alamos, a young lieutenant named Herman Goldstine recognized that there would be intense interest in the idea, and he circulated the memo widely. Scientists around the world immediately saw the value of the stored-program model, and computers based on the model (virtually all computers) have been called von Neumann machines ever since. Many historians believe that Eckert and Mauchly deserve credit for the idea (as did Turing!), but von Neumann’s memo was certainly the spark that made it happen around the world.
The stored-program model enables computers to perform any type of computation, without requiring the user to physically alter or reconfigure the hardware. This simple but fundamental model has been used in virtually every computer since von Neumann first articulated it.
In hindsight, the von Neumann architecture may seem obvious. However, plenty of research groups were working in a different direction at the time, and the question of whether a computer built around a stored program model can be as powerful as a computer that can be rewired and reconfigured was debated. In fact, Turing’s theory shows that the ability to physically reconfigure a computer does not enable it to solve more problems, so long as the basic instruction set is rich enough (as is the case even with our TOY machine). Other than Turing himself, von Neumann was one of the few people in the world in a position to appreciate this point. His ability to fully articulate the idea in a practical context on a long train ride was a serendipitous development that profoundly changed the world.
A. Yes. Many, many people learned this skill. Even when better input/output devices became available, it was necessary to enter a program through switches that could drive one of the devices.
Q. What’s the difference between a register and a memory word?
A. Both store 16-bit integers, but they play different roles within the computer. The purpose of the memory is to hold programs and data—we want the memory to be as large as possible. The purpose of the registers is to provide an intermediate staging ground to get data to and from the ALU—only a limited number of registers are really needed. Typically, computers use more expensive technology for registers because they are involved in virtually every instruction. The number of registers in a computer is a design decision.
Q. Are special-purpose computers or microprocessors still fabricated today?
A. Yes, because it is possible to do simple things faster in hardware than in software.
Q. It’s hard to imagine programming without thinking in terms of loops and conditionals. Did people really work that way?
A. Most certainly. Programmers designed their logic with flowcharts, and early high-level languages had a “goto” statement that translated to a machine-language branch. The idea of “structured programming” using just loops, conditionals, and functions emerged in academia but was not taken seriously by many programmers until the 1970s. One famous turning point was a letter to the editor of the Communications of the ACM by E. W. Dijkstra in 1968, entitled “Goto considered harmful.” In this letter he argued for the “goto” statement to be abolished in all higher-level programming languages because programs that use it are too difficult to understand, debug, and maintain. This point of view was universally embraced within a decade, and structured programming has been taken for granted since.
6.2.1 How many bits of memory does TOY have? Include all registers (including the PC) and main memory.
6.2.2 TOY uses 8-bit memory addresses, which means that it is possible to access 256 words of memory. How many words of memory can we address with 32-bit addresses? 64-bit addresses?
6.2.3 Suppose that we want to use the same instruction format as TOY, but with 32-bit addresses. What word size would we need? Describe a problem with this design.
6.2.4 Give a single instruction that changes the program counter to memory address 15 regardless of the contents of any registers or memory cells.
Solution. C015 or F015. Both instructions rely on the fact that R[0] is always 0000.
6.2.5 List seven instructions (all having different opcodes) that put 0000 into register A.
Solution. 1A00, 2Axx, 3A0x, 4Axx, 5A0x, 6A0x, 7A00, where x is any hex digit.
6.2.6 List three ways (different opcodes) to set the program counter to 00 without changing the contents of any register or memory cell.
Solution. C000, E0xy, F000.
6.2.7 List five instructions (all having different opcodes) that are no-ops. Exclude cases where the second digit is 0.
Solution. 1xx0, 1x0x, 2xx0, 3xxx, 5xx0, 6xx0, or D0xx, where x is any hex digit other than 0.
6.2.8 List six ways to assign the contents of R[B] into R[A].
Solution. 1AB0, 1A0B, 2AB0, 3ABB, 4A0B, 4AB0, 5AB0, and 6AB0.
6.2.9 There is no branch if non-negative operator in TOY. Explain how to jump to memory address 15 if R[A] is greater than or equal to 0.
Solution. Use branch if positive and branch if zero, one after the other: CA15 DA15.
6.2.10 Fill in the blanks in this table:

6.2.11 There is no absolute value function in TOY. Give a sequence of TOY instructions that sets R[d] to the absolute value of R[s].
6.2.12 There is no bitwise NOR operator in TOY. Give a sequence of three TOY instructions that sets each bit of Rd to 1 if and only if either or both of the corresponding bits in R[s] and R[t] are 0.
6.2.13 There is no bitwise OR operator in TOY. Give a sequence of three TOY instructions that sets each bit of R[d] to 0 if and only if either or both of the corresponding bits in R[s] and R[t] are 1.
Solution. 3DAB 4EAB 1CDE.
6.2.14 There is no bitwise NAND operator in TOY. Give a sequence of three TOY instructions that sets each bit of R[d] to 0 if and only if both of the corresponding bits in R[s] and R[t] are 1.
6.2.15 There is no bitwise NOT operator in TOY. Give a sequence of three TOY instructions that sets each bit of R[d] to the opposite of the corresponding bit value in R[s].
Solution. 7101 2B01 4BAB or 7101 2B01 2BBA.
6.2.16 Show that the subtract operator is redundant. That is, explain how to compute Rd = Rs - Rt by using a sequence of TOY instructions that do not involve opcode 2.
6.2.17 Which of the 16 TOY instructions do not use all 16 bits?
Solution. Halt (only uses first 4 bits), load indirect (does not use third hex digit), store indirect (does not use third hex digit), jump register (does not use two hex digits).
6.2.18 We interpret some TOY integers to be negative according to two’s complement notation. What are the only instructions for which this matters?
Solution. The branch positive instruction treats integers between 0001 and 7FFF as positive. The right shift instruction is an arithmetic shift so that if the leftmost bit is 1, then vacated positions are filled with 1s. All other instructions (even subtract!) do not depend on whether TOY has negative integers.
6.2.19 Improve the TOY function for computing the gcd given in the text by including a variable c initialized at 0 and modifying the while loop as follows:
• If a and b are even, gcd(a, b) = 2 gcd(a / 2, b / 2), so divide both a and b by 2 and increment c by 1.
• If a is even and b is odd, gcd(a, b) = gcd(a / 2, b) so divide a by 2.
• If a is odd and b is even, divide b by 2 (same reasoning).
• Otherwise, both a and b are odd, so proceed as before (replacing the larger by their difference, which, by the way, is even).
At the end, shift the result left by c positions to account for the factors of 2 cast out. Include a client that reads in two integers from standard input and punches their greatest common divisor to standard output. (Analysis beyond the scope of this book shows that the worst-case running time of this algorithm is quadratic in the number of bits in the numbers—much faster than the version given in the text.)