Considering control requirements for animatronic props
Looking at microcontroller products from EFX-TEK
Examining programming requirements for relay control
Investigating programming requirements for sound control
Responding to a motion detector
A complete program for a scary jack-in-the-box prop
Animatronics
refers to the technology used to create automated puppets that move by themselves. The movements are provided by mechanical means such as motors, servos, compressed air, or pneumatics. Animatronic puppets are usually controlled by microprocessors.
My fascination with animatronics started at a very young age, when I first visited Disneyland as a child and was mesmerized by three of the most amazing things I had ever seen: Enchanted Tiki Room,
filled with marvelous robotic birds that sang and told jokes; Pirates of the Caribbean,
with its swashbuckling pirates; and of course The Haunted Mansion,
with its 999 ghosts and room for one more.
The Haunted Mansion was the pièce de résistance.
I have been fascinated with all things Halloween ever since and tinkered on and off over the years with building my own animatronic ghosts and goblins.
In this chapter, I show you how to build a microprocessor-based controller system that I’ve used in several of my best Halloween props. I’ve used this exact circuit to create a Frankenstein creature that pops up, a mummy that pops up, and a giant jack-in-the-box, but you can use this circuit to control just about any kind of animatronic creation you can imagine.
Note that Halloween isn’t the only application for animatronics. You can use them in theatrical productions, school fundraisers, or for promotional or marketing purposes. For example, if you own a flower shop, you could create animatronic flowers for your storefront display, or if you own a tuxedo store, you could create an animatronic dancer dressed in your finest tuxedo to draw customers in. The only limit is your imagination.
Animatronics should be built and used with care, as they can be dangerous. You must ensure that no one who views your animatronic will be exposed to any danger, such as loose electrical connections or faulty compressed-air fittings. Make sure you place your finished animatronic in a secure area where no one will be able to touch it, and make sure that all electrical and compressed-air fittings are completely secure.
If your animatronic prop uses compressed air, be especially careful! This chapter doesn’t show you how to work with compressed air because that’s a subject for an entire book. If you want to work with compressed air, always use professionally designed and manufactured components such as air cylinders and pop-up mechanisms. Don’t try to build your own compressed air cylinders out of PVC pipe, bicycle pumps, or any other material that isn’t specifically designed to work with compressed air. And beware of inexpensive compressed-air devices available on eBay or other online sites. A good, safe compressed air mechanism should cost you several hundred dollars. If it’s selling online for $49, it’s probably not safe.
Looking at the Requirements of Animatronic Prop Control
Whether it’s used in a haunted house, trade show exhibit, store display, or museum, a typical animatronic prop requires the following elements to achieve the desired effect:
Most props require some sort of trigger to initiate the prop’s routine. The trigger can be as simple as a button that you or a customer pushes to start the routine, or it could be a timer that causes the prop to start up
automatically every 5 or 10 minutes. A third option is to use a motion detector that causes the prop to start when motion is detected near the prop.
All props require a way to control the prop’s actuators,
which are the components that cause the prop to move. The most common types of actuators are electric motors, servos, and compressed air cylinders. If you’re using an electric motor, the prop controller usually turns the motor on or off directly by applying current to the motor. If you’re using servos, the prop controller must send timing pulses to the servo to control the servo’s position. And if you’re using compressed air cylinders, the prop controller opens and closes electric valves that allow air into the cylinders.
Most props require lighting effects that enable the viewer to see the prop in action. In some cases, this is as simple as one or more lights that come on when the prop starts its routine and go off when the routine ends. In other cases, a variety of lights are used during the routine to highlight different parts of the prop during different parts of the show.
Some props use sound that is synchronized with the prop’s movements. For example, an animated face might speak dialog, a scary creature might scream when it suddenly moves, or the prop may use music to enhance its routine.
The prop controller I show you how to build in this chapter meets all these needs. It’s based on a BASIC Stamp microprocessor, which provides more than enough computing power to control lights and sound and activate a few pneumatic valves and electric motors.
Instead of building the controller from a BASIC Stamp module from Parallax, the controller shown in this chapter uses components from a company named EFX-TEK, which specializes in microprocessor components for animatronic prop controls. The prop controller uses three products from EFX-TEK: a Prop-1 controller board, which includes a BASIC Stamp microprocessor; an RC-4 relay board that can hold up to four relays for switching 120 VAC circuits; and an
sound board, which can be programmed to play sounds saved on a standard SD memory card.
For more information about these components and how to use them, see the section “Building the Prop Controller
” later in this chapter.
EFX-TEK has recently replaced its RC-4 relay board with a new and improved version called the
. The
is compatible with the
, so you can build the prop controller using either board.
Examining a Typical Animatronic Prop
Figure 3-1
shows a typical animatronic prop that I made a few years ago to use in a Halloween haunted house. The prop is a large jack-in-the-box that benignly plays “Pop Goes the Weasel” while a crank on one side of the prop slowly spins until an unsuspecting visitor approaches it. Then — all in one frightening moment — the music stops, the lid flies open, a large clown head pops up, a bright light comes on to ensure that you can see the clown, and a ghastly voice screams, “Trick or treat!” A moment later, the light goes off, and the clown retracts back into the box. A few seconds after that, the crank starts spinning and the music plays again while the jack-in-the-box waits for another victim.
The basic pop-up operation of the jack-in-the-box is accomplished with a compressed air mechanism that can be controlled with an electrically activated valve. When the valve is closed, the mechanism is retracted inside the box. When the valve opens, compressed air flows into an air cylinder that extends the mechanism upward. The clown head is mounted on top of the mechanism. The lid of the jack-in-the-box is positioned such that the clown’s head pushes the lid open when the mechanism extends. Gravity takes care of closing the lid when the mechanism retracts, and the clown goes back into the box.
Note that the point of this chapter is to show you how to build the electronic part of this prop — the prop controller that controls the prop’s action. This chapter doesn’t show you how to build the prop itself. The prop controller is generic enough that it can control just about any prop that includes simple actions such as pneumatic pop-ups, motors, lights, and sound. In fact I’ve used this very same design for half a dozen different Halloween props.
Nevertheless, it’s beneficial to see how the prop controller works in a specific prop, so the following paragraphs describe in general terms how I built the jack-in-the-box prop. This will give you a general idea of how it operates so that you can see how the prop controller works with it.
The most important component of this prop is the pneumatic lifting mechanism. I purchased it for about $250 from an online distributor of Halloween prop mechanisms. If you search the web, you’ll find several distributors that make safe, professional-quality compressed-air mechanisms. Just search for Halloween prop lifter
and you’ll find several suppliers. You can also find them for sale on eBay.
Figure 3-2
shows a close-up photograph of the lift mechanism.
The lift mechanism I purchased included the welded steel frame, a pneumatic cylinder that provides the motion needed to lift the frame, and an electrical valve that can be connected to a compressed air hose. When the valve is connected to a source of compressed air and voltage is applied, the valve opens to allow compressed air into the cylinder.
Do not, under any circumstances, attempt to cut corners by building your own lifter mechanism unless you are an experienced metalworker. The Internet has plans for similar devices made out of sprinkler pipe or bicycle pumps, but putting compressed air into plastic or metal parts that were not designed to handle compressed air is an excellent way to maim or even kill someone.
The prop is housed in a 22-inch square box I constructed from
-inch plywood, reinforced inside with
-inch lumber. I was able to cut all six sides and the lid out of a single
-foot sheet of plywood.
To create the lid, I used a sabre saw to cut out the opening. Then, I cut a separate piece of plywood about 1 inch larger than the opening to use as the lid. I used a pair of small gate hinges to connect the lid to the box.
I mounted the lift mechanism directly to the bottom of the box. Depending on the design of the mechanism you use, you may have to mount the lift on the back of the box instead of the bottom.
I drilled two 1-inch diameter holes in the back of the box to pass the electrical power cord and the compressed air hose into the box.
The clown consists of a small foam wig head that I bought at a thrift store and a mask that I purchased at a seasonal Halloween costume shop.
I used a surplus automotive windshield wiper motor to turn the crank. You can find them for sale on the Internet for about $15. I fabricated the crank itself from a few pieces of scrap metal I had lying around.
The prop controller is mounted inside the box, secured to one of the side panels with four screws.
To trigger the prop, an infrared motion detector called a PIR
is used. The motion detector is mounted to the outside of the box and connected via a 24-inch cable to the prop controller. When the motion detector detects nearby motion, the programming in the prop controller triggers the prop to activate the valve so the clown pops up.
To light up the clown’s face when he pops up, I used a 75 W white flood lamp mounted in a plastic flood lamp holder I got from a home improvement store.
For the sound, I used a set of inexpensive speakers that I had lying around. The speakers are connected to the audio output from the prop controller’s sound board. This sound board includes a 20 W amplifier, which is more than loud enough to give a good scare when the clown pops up.
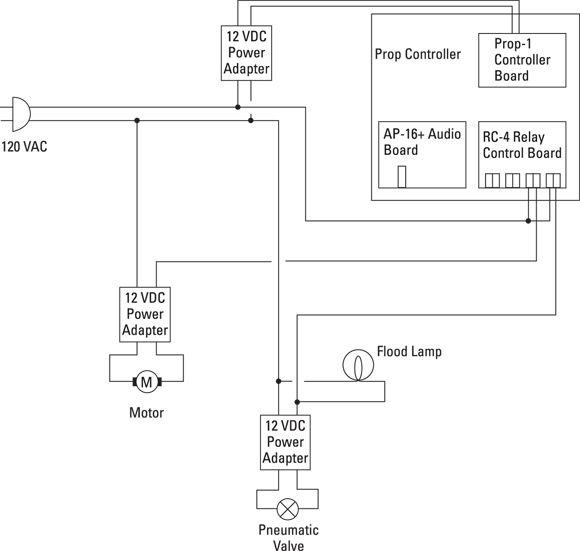
Figure 3-3
shows a wiring diagram of the prop so you can get an idea of the prop’s electrical requirements. As you can see, the prop requires a total of three 12 VDC power adapters, commonly known as wall warts.
The first is to power the prop controller, the second provides 12 VDC for the windshield wiper motor, and the third provides 12 VDC for the pneumatic valve.
To simplify the wiring, I used three six-outlet power strips and an eight-terminal barrier strip, which aren’t shown on this diagram. One of the power strips plugs directly into a wall outlet to supply the main 120 VAC power for the prop. The other two power strips are connected to the RC-4 relay control board. Using these power strips allows you to simply plug in the 12 VDC power adapters and the flood lamp holder.
The prop runs on 120 VAC household power, and there are several exposed electrical connections inside the box. Therefore, it’s imperative that the inside of the box is inaccessible to humans.
It’s especially important that the wiring is secure enough to withstand the vibrations that the box will experience every time the prop is activated. When the valve closes, the cylinder extends, the lid swings open, and the clown pops up his head, the box will be jolted more than a little. To insure that the frequent shaking doesn’t cause any electrical connects to come lose, all electrical wires are fastened down with wire holders, and all connections are made with soldered terminals that are tightly screwed to the barrier strip.
FIGURE 3-3:
Schematic diagram for the jack-in-the-box prop.
That’s about it for the jack-in-the-box prop itself. As I’ve already mentioned, the primary focus of this chapter is building the prop controller that provides the brains for this prop. The prop controller can be used for any other type of prop with similar requirements. And, if your prop is more complex than the jack-in-the-box, you can easily expand the prop controller by including additional relay control boards to control more devices.
Building the Prop Controller
Figure 3-4
shows the fully assembled prop controller used to control the jack-in-the-box prop. As you can see, the prop controller is made from three circuit boards, which you can purchase from EFX-TEK (www.efx-tek.com
). The boards are mounted on an
-inch sheet of Plexiglas, which you can purchase from most hardware stores. Before mounting the components on Plexiglas, spray-paint the back of the Plexiglas black to create a nice, professional-looking board.
FIGURE 3-4:
The assembled animatronic prop controller.
Here’s a complete list of the parts you’ll need to build the prop controller:
Quantity
Description
1
EFX-TEK Prop-1 controller
1
EFX-TEK PIR sensor (includes a 14-inch extension cable for connecting to the Prop-1)
1
EFX-TEK
audio player
1
EFX-TEK RC-4 relay control board
2
Crydom D2W203F solid-state relays
3
EFX-TEK stand-off kits (each kit includes four
-inch stand-offs and eight 4-40 machine screws)
2
14-inch servo-style extension cables
2
6-inch lengths of 16-gauge stranded wire
1
-inch sheet of
-inch Plexiglas
1
Can of black spray paint
All these components except the wire, Plexiglas, and the paint can be ordered from EFX-TEK at www.efx-tek.com
. The total price for all components should be around $275.
The following paragraphs describe the four main components of the prop controller, which are listed first in the parts list:
Prop-1 controller:
The brains of the prop controller. This inexpensive controller board ($39.95) contains a BASIC Stamp microcontroller and two I/O busses that give you direct access to the BASIC Stamp’s eight I/O pins. The first bus is a series of three-pin headers that you can connect standard servo cables to. These connectors provide a TTL interface to the BASIC Stamp and are used for low-current applications such as communicating with other prop-control elements.
The second bus is for high-current applications that can handle up to 500 mA. These outputs can be used to directly drive small motors, relays, solenoid valves, and so on.
The Prop-1 also includes a 5 V regulated power supply and a programming interface so you can connect it directly to your computer to download programs.
PIR sensor:
An inexpensive (under $10) motion detector that can be connected via a three-pin servo cable to any of the Prop-1’s low-current I/O pins. This device is used to trigger the prop’s action.
audio player:
At $129.95, the audio player is the most expensive component of the prop controller. However, sound is an essential element of any good prop, and the
is an extremely versatile sound player. It can play sounds in WAV format directly from a micro-SD card and includes a built-in 20 W amplifier, so you can connect speakers directly to the
without using a separate amplifier. The
also connects to the Prop-1 via a three-pin servo cable. This connection allows the Prop-1 to send commands to the
to tell the
to play specific sound files on the micro-SD card.
RC-4 relay control:
This module lets you control up to four line-voltage (120 VAC) circuits by using solid-state relays. It connects to the Prop-1 via a three-pin servo cable, enabling the Prop-1 to send commands to the RC-4 to tell it to turn its relays on or off under program control.
I can’t say it too many times in this chapter: The prop controller uses line-level voltages that can hurt or even kill you if you aren’t careful. Make sure that the line-level wiring is properly secured and enclosed, and never
work on the controller board when the line-level circuits are plugged in.
Here are the steps to assemble the prop controller:
Paint one side of the Plexiglas with the black spray paint and allow the paint to dry.
Drill the necessary mounting holes in the Plexiglas.
You’ll need to drill four mounting holes for each of the three boards that will be mounted to the Plexiglas (Prop-1, RC-4, and
). Use a
-inch drill bit. Figure 3-5
is a rough drilling guide, but note that this diagram isn’t to scale. You’ll need to lay your actual components out on the Plexiglas to determine the exact drilling locations.
Mount the Prop-1 controller on the Plexiglas.
Use four of the stand-offs and eight of the 4/40 machine screws. Position the Prop-1 controller so that the row of screw terminal connectors is on the left side of the controller as oriented in Figure 3-5
.
Mount the RC-4 board on the Plexiglas.
Use four of the stand-offs and eight of the 4-40 machine screws. Position the RC-4 board so that the four screw-terminal connectors are at the bottom of the board as oriented in Figure 3-5
.
Mount theboard on the Plexiglas.
Use four of the stand-offs and eight of the 4-40 machine screws. Position the
board so that the audio output connectors are at the bottom of the board as oriented in Figure 3-5
.
Use the two wires to connect theand GND terminals on the Prop-1 to theand GND terminals on theboard.
These wires are used to provide power for the
board. After test-fitting the wires, cut them to the correct length and strip
inch of insulation off each end. Then insert each end of the wire into the appropriate screw terminal and tighten the screw to ensure a solid connection.
Use one of the extension cables to connect the P7 header on the Prop-1 controller to the SER header on the RC-4.
This cable enables the Prop-1 controller to send commands to the RC-4 board to cause the RC-4 board to turn its relays on or off.
Eight three-pin headers are found near the center of the Prop-1 controller board. These headers provide access to the eight I/O ports of the BASIC Stamp microprocessor. The headers are labeled P0 through P7, so you shouldn’t have trouble finding the correct header.
There are two three-pin headers on the RC-4 board, both labeled SER. These two headers are connected to one another, so it doesn’t matter which one you use as they’re electrically the same.
The only trick to connecting the extension cable is making sure you get them oriented correctly. The extension cable has three wires: white, red, and black. The cables must be inserted into the header correctly, or the Prop-1 won’t be able to communicate with the RC-4.
Orienting the cable correctly on the Prop-1 is easy because the three-pin headers are labeled to indicate which pin is white, which is red, and which is black. On the RC-4, the cable should be inserted into the header with the black wire facing the outside edge of the board and the white wire facing the center of the board.
Use the second extension cable to connect the empty SER header on the RC-4 board to one of the SERIAL headers on theboard.
The purpose of this connection is to enable the Prop-1 controller to communicate with the
audio player to tell it when to play its sounds.
As oriented in Figure 3-5
, the SERIAL header pins are located near the top-right corner of the
board. The pins on the
headers are labeled W, R, and B, so you should have no trouble orienting the wire colors. As with the RC-4, there are two SERIAL headers on the
; it doesn’t matter which of them you use.
Use the third extension cable to connect the PIR sensor to the P6 header on the Prop-1 controller.
The P6 header is right next to the P7 header.
Insert the two Crydom solid-state relays in the K1 and K2 positions on the RC-4 board.
Note that if your prop needs to control more than two 120 VAC circuits, you can add up to four Crydom relays to the RC-4 board. And you can add additional RC-4 boards if you need to control more than four circuits.
FIGURE 3-5:
Where to mount the circuit boards and drill the mounting holes for the animatronic prop controller.
Programming the Prop-1 Controller
At the heart of a Prop-1 controller is a Parallax BASIC Stamp microcontroller. As a result, you can program the Prop-1 controller using the same PBASIC programming language you use to program a BASIC Stamp. The techniques for programming in PBASIC are presented in detail in Book 7
. As a result, I won’t review those details here. You’ll need to be familiar with the concepts presented in Book 7
before you attempt to program the Prop-1 controller.
However, realize that the Prop-1 controller uses a simpler form of the BASIC Stamp microprocessor, known as the BASIC Stamp 1. Book 7
covers the more advanced version of the BASIC Stamp, called the BASIC Stamp 2. The BASIC Stamp 1 uses a simpler version of PBASIC than the BASIC Stamp. Here are some of the differences you’ll need to be aware of:
The BASIC Stamp 1 has less memory than the BASIC Stamp 2. Specifically, the Stamp 1 has just 256 bytes of program memory, which means that the longest program for a Prop-1 is around 80 to 100 statements. In addition, you’re limited to just 14 bytes of variable memory, which means your programs can have just a few variables.
For most simple animatronic props, these limitations aren’t a problem. If your prop is more complicated, EFX-TEK offers a Prop-2 controller, which uses a BASIC Stamp 2 microcontroller. It’s about $60 more than the Prop-1 controller, however.
Some of the programming instructions covered in Book 7
don’t work on the BASIC Stamp 1. The biggest limitation is that the IF statement is much simpler: The BASIC Stamp 1 IF statement can test for a condition and branch to a label if the condition is true, like this:
IF PIN0 = 0 THEN Main
Here, the program branches to the label named Main
if the value of the variable PIN0
is zero. The more complicated variants of the IF statement covered in Book 7, Chapter 2
aren’t allowed.
Because there’s such a limited amount of variable memory, variables have preassigned names on the BASIC Stamp 1.
There are two types of variables on the BASIC Stamp 1: 8-bit variables called Byte variables and 16-bit variables called Word variables.
The Byte variables are named B0 through B13.
The Word variables are named W0 through W6.
Note that the Word variables occupy the same 14 bytes of memory that the Byte variables occupy. Thus, W0 occupies the same two bytes as B0 and B1; W1 occupies the same two bytes as B2 and B3; and so on.
You can use the SYMBOL statement to assign a more meaningful name to one of the prenamed variables. For example:
SYMBOL Counter = B0
This statement assigns the symbol Counter
to the byte variable B0. Thereafter, you can use the name Counter
to refer to this variable.
The SYMBOL statement can also give meaningful names to I/O pins, as in this example:
SYMBOL Pir = PIN6
In this example, the name Pir
is used to refer to I/O pin 6.
Other than these variations, programming the BASIC Stamp 1 microcontroller is similar to programming its more advanced counterpart.
Sending Commands to the RC-4 or
Modules
I don’t cover the PBASIC command called SEROUT in Book 7
, but you’ll need to be familiar with it to use EFX-TEK’s RC-4 and
modules. The SEROUT command sends data to an external device that’s connected to the Prop-1 controller via one of the I/O pins. It uses a very simple serial communications protocol to accomplish this. Fortunately, you don’t need to worry about the details of how the serial communications protocol works to use the SEROUT command to talk to an RC-4 or
module. But you do need to know how to use the SEROUT command.
The SEROUT command has a simple syntax:
SEROUT pin
, mode
, (data
)
The first parameter of the SEROUT command, pin,
is simply the pin number that the data is to be sent to. Since the RC-4 and
modules are connected to PIN7 in the animatronic prop controller, you’ll simply specify PIN7 for this parameter.
The second parameter indicates the communication mode that will be used to send the data. For all EFX-TEK I/O modules, you should specify the built-in constant OT2400 for this parameter.
In case you’re interested, OT2400 means that the transmission speed is 2400 bits per second, and the output polarity is open-drain driven high — which sounds pretty technical to me, so I wouldn’t worry about it. Just use OT2400 for this parameter.
The third parameter, (data),
is the one that actually specifies the data to be sent to the external device. You must enclose the data in parentheses, and within the parentheses you can list as many string constants or variables as you want. For example:
SEROUT PIN7, OT2400, ("Hello World!")
This statement sends the string constant “Hello World!” to the device on PIN7.
Here’s an example that accomplishes the same thing but with three string constants instead of one:
You might reasonably ask why you would use several string constants or variables instead of just one. The answer to that excellent question will become apparent when you read the following two sections about programming the RC-4 and
modules.
It’s a good idea to assign a symbol to the I/O pin to which the RC-4 and
modules are attached, and to the communication mode. For example:
SYMBOL Sio = 7 SEROUT Sio, OT2400, ("Hello, World!")
That way, if you decide to change the I/O pin to which the external device is attached, you have to make only one change to your program — the symbol definition — instead of multiple changes in each SEROUT statement.
Though not as important, it’s also a good idea to use a symbol for the mode parameter, like this:
SYMBOL Sio = 7 SYMBOL Baud = OT2400 SEROUT Sio, Baud, ("Hello, World!")
Why? Because someday you may decide to move your program over to a Prop-2 controller. When you do, you’ll discover that the BASIC Stamp 2 SEROUT command has additional mode settings that enable faster and more reliable serial communications. You’ll be able to change the serial communications mode for all your program’s SEROUT commands simply by changing the SYMBOL statement.
Programming the RC-4 Relay Control Module
The RC-4 relay control module supports up to four high-voltage solid-state relays that can turn line-voltage circuits on and off. EFX-TEK sells the board and relays separately, so you can equip it with just the number of relays your project needs.
A pair of jumper blocks on the RC-4 board lets you give it an address value of 0, 1, 2, or 3. This allows you to daisy-chain up to four RC-4 boards together, allowing you to control up to 16 separate relay circuits. The examples in this section assume that you have removed these two jumpers so that the address of the RC-4 is 0.
To control an RC-4 board from a Prop-1 controller, you use the SEROUT command to send data to the pin that the RC-4 board is connected to. The data that you send must follow this format:
"!RC4", address, command {,data}
The first data item is the string constant “!RC4”. This string constant is a preamble that indicates that the data that follows is intended for an RC-4 relay control card. This allows you to chain several different kinds of EFX-TEK cards together and send commands only to the RC-4.
The second data item is the address of the RC-4 card you want to send the data to. The possible values are 0, 1, 2, or 3.
The third data item is a command, which is a single character that represents one of several commands that the RC-4 can respond to. Depending on the command used, you may also need to provide one or two additional bytes of data after the command. The possible commands are:
Command
What It Does
X
Resets all relays. No additional data is needed.
R
Sets or resets an individual relay to a particular value. Two data bytes are required: one to indicate which relay to set or reset, and a second to indicate whether the relay should be closed (set) or opened (reset).
S
Sets all relays. The S command is followed by a single byte of binary data that indicates which relays should be open and which should be closed.
V
Causes the RC-4 to send its firmware version information back to the prop controller. The version information can be read with a SERIN command.
G
Gets the current status of all relays. Use the SERIN command to read the data from the RC-4 after sending this command.
The three RC-4 commands you’ll use most often are X, to reset all relays; R, to set an individual relay; and S, to set each of the four relays to a particular status (on or off). These commands are described in the following sections.
Turning all relays off
To turn all the relays on an RC-4 module off, use the X command. For example:
SEROUT PIN7, OT2400, ("!RC4", 0, "X")
It’s a good idea to use this command near the beginning of your program to make sure that the program starts with all relays off.
Turning an individual relay on or off
To turn an individual relay on or off, you send an R command to the RC-4. The R command requires that you send five separate data items:
The preamble: “!RC4”
The RC-4 board’s address
The command “R”
The relay number: 1 through 4
The relays status: 1 to turn the relay on, 0 to turn the relay off
Here’s a SEROUT statement to turn the first relay (number 1) on:
SEROUT PIN7, OT2400, ("!RC4", 0, "R", 1, 1)
And here’s a SEROUT statement to turn the first relay off:
SEROUT PIN7, OT2400, ("!RC4", 0, "R", 1, 0)
Setting all four relays at once
To set the status of all four relays at one time, you can use the S command. This command requires four data items:
The preamble: “!RC4”
The RC-4 board’s address
The command “S”
A single byte value that represents the status of the four relays
The value that controls the relay status is usually written as a percent sign followed by four binary bits representing the status of each relay — 1 for on and 0 for off. The only trick is that the four binary bits are written in reverse order: The first is relay 4, the second is relay 3, the third is relay 2, and the fourth is relay 1.
For example, to turn relay 1 on and the other three relays off, you would use %0001 as the relay status. To turn relays 1 and 3 on and relays 2 and 4 off, you would use %0101 as the status.
Here’s a SEROUT command that sends an S command to turn all four relays on:
SEROUT PIN7, OT2400, ("!RC4", 0, "S", %1111)
And here’s a SEROUT command that turns relays 1 and 3 on and simultaneously turns relays 2 and 4 off:
SEROUT PIN7, OT2400, ("!RC4", 0, "S", %0101)
The following SEROUT command turns all relays off, which is equivalent to sending an “X” command:
SEROUT PIN7, OT2400, ("!RC4", 0, "S", %0000)
Using symbols to make RC-4 commands more readable
As I mention earlier in this chapter, it’s a good idea to use symbols for the I/O pin and output mode. It’s also a good idea to use symbols for the RC-4 address, for the relay number, and for the relay status (on or off). That can make your program more readable.
For example, here are some typical symbol declarations:
SYMBOL Sio = 7 SYMBOL Baud = OT2400 SYMBOL RC4 = 0 SYMBOL Relay1 = 1 SYMBOL Relay2 = 2 SYMBOL Relay3 = 3 SYMBOL Relay4 = 4 SYMBOL RelayOn = 1 SYMBOL RelayOff = 0
With these symbol declarations in place, you can turn on relay 1 with this statement:
Here’s a SEROUT statement that uses the symbols to send an S command that turns relays 2 and 4 on and relays 1 and 3 off:
SEROUT Sio, Baud, ("!RC4", RC4, "S",%1010)
A sample program for controlling all four RC-4 relays
Listing 3-1
shows a complete PBASIC program that gives the RC-4 card a bit of a workout by performing the following sequence of steps:
Turn off all relays with an X command.
Pause 1 second.
Use a series of S commands to turn on relays 1, 2, 3, and 4 in sequence at 1-second intervals.
As each relay is turned on, the other three are turned off.
Pause 1 second, and then turn off all relays.
Use a series of R commands to turn on relays 1, 2, 3, and 4 in sequence at 1-second intervals.
As each relay is turned on, the status of the other relays are left unchanged. As a result, this part of the program first turns on relay 1, then adds relay 2, then adds relay 3, and then adds relay 4. At this point, all four relays are on.
Wait 1 second, and then repeat the entire program.
You can download this program from this book’s companion website.
΄ {$STAMP BS1} ΄ {$PBASIC 1.0} SYMBOL Sio = 7 SYMBOL Baud = OT2400 SYMBOL RC4 = 0 SYMBOL Relay1 = 1 SYMBOL Relay2 = 2 SYMBOL Relay3 = 3 SYMBOL Relay4 = 4 SYMBOL RelayOn = 1 SYMBOL RelayOff = 0 Main: ΄Turn off all relays SEROUT Sio, Baud, ("!RC4", RC4, "X") PAUSE 1000 ΄Cycle through the relays one at a time SEROUT Sio, Baud, ("!RC4", RC4, "S", %0001) PAUSE 1000 SEROUT Sio, Baud, ("!RC4", RC4, "S", %0010) PAUSE 1000 SEROUT Sio, Baud, ("!RC4", RC4, "S", %0100) PAUSE 1000 SEROUT Sio, Baud, ("!RC4", RC4, "S", %1000) PAUSE 1000 ΄Turn off all relays SEROUT Sio, Baud, ("!RC4", RC4, "S", %0000) PAUSE 1000 ΄Turn on relay 1 SEROUT Sio, Baud, ("!RC4", RC4, "R", Relay1, RelayOn) PAUSE 1000 ΄Add relay 2 SEROUT Sio, Baud, ("!RC4", RC4, "R", Relay2, RelayOn) PAUSE 1000
΄Add relay 3 SEROUT Sio, Baud, ("!RC4", RC4, "R", Relay3, RelayOn) PAUSE 1000 ΄Add relay 4 SEROUT Sio, Baud, ("!RC4", RC4, "R", Relay4, RelayOn) PAUSE 1000 ΄Repeat! GOTO Main
Programming the
Audio Player Module
The
audio player module is an amazingly versatile way to add sound to your animatronic prop. Like the RC-4, you communicate with the
module using serial communication via the SEROUT statement. Some commands cause the
module to return data, which you can retrieve with the SERIN statement. But for most props, all you have to do is send a few commands using SEROUT, so you can dispense with the SERIN statement.
The
board can play sounds recorded in WAV format stored on a micro-SD card. So before you program your prop, you’ll need to prepare a micro-SD card with the files you want the prop to play. You can simply use your computer to copy the files to the micro-SD card; the only restriction is that the filenames must be no longer than eight characters, and the filename extension must be .wav
. (The
card can’t play MP3 files.)
For the jack-in-the-box prop, just two sound files are needed. The file that contains the “Pop Goes the Weasel” song is named weasel.wav
. I created this recording myself; you can download it from this book’s companion website.
The other file is a horrific scream that is played when the clown pops up. This file is named scream.wav
. It is also available on the companion website.
The
is an extremely versatile card that’s designed to be usable in stand-alone mode — that is, not controlled by a microcontroller. Many of its features are useful primarily in stand-alone mode. For example, you can store files on the micro-SD card with predefined filenames such as SFXnn.wav
and AUXnn.wav
, where nn
is a two-digit number (for example, SFX01.wav
or AUX04.wav
).
The
can be configured to automatically play these files in random ways in response to direct trigger inputs on the card. The
can also be configured to play an ambient background sound whose filename must be ambient.wav
. These are all very useful features, but not relevant to the prop controller presented in this chapter. So although I ignore those features in this section, I suggest you carefully read the
documentation supplied by EFX-TEK to see how these features work.
To control an
module from a Prop-1 controller, you use the SEROUT command to send data to the pin that the
is connected to. The data that you send must follow this format:
"!AP16", address, command {,data}
The string constant “!AP16” is the preamble that indicates that the command is intended for an
module. This allows you to chain different kinds of modules together with the
, making it possible to control all the modules used in a project from a single I/O pin.
The second data item is the address of the
module you want to send the command to. The possible values are 0, 1, 2, or 3. The address is set by a pair of jumpers on the
board. For the examples in this section, I assume the
address is 0.
The third data item is the command. Depending on the command used, you may also need to provide additional data after the command. The possible commands are:
Command
What It Does
X
Resets the
, which stops any sound that may be playing.
L
Sets the output volume.
PW
Plays a named file. Additional data provides the name of the file and the number of times to loop the file. (Specify 0 for the loop value to repeat the file indefinitely.)
G
Gets the current status of the
card. Use the SERIN command to read a single byte that indicates whether the
is currently playing a sound file and, if so, which sound file is being played.
PS
Plays one of the SFXnn.wav
files. Additional data provides the SFX number (that is, the nn
) and the number of times the file should be looped. (Specify 0 for the loop value to repeat the file indefinitely.)
P?
Randomly selects one of the SFXnn.wav
files to play.
PA
Plays one of the AUXnn.wav
files. Additional data provides the SFX number (that is, the nn
) and the number of times the file should be looped. (Specify 0 for the loop value to repeat the file indefinitely.)
S
Changes the playback speed.
V
Gets the
version information. The version information can be read with a SERIN command.
The four
commands you’ll use most are X, to reset the sound player and stop any sound that may be playing; L to set the output volume; PW, to play a specific file; and G, to get the current status of the
so you can find out if it has finished playing a sound file. These commands are described in the following sections.
Note that throughout these sections, I assume that the following symbols have been defined near the top of the program:
SYMBOL Sio = 7 SYMBOL Baud = OT2400 SYMBOL AP16 = 0
Resetting the
To reset the
, send an X command like this:
SEROUT Sio, Baud, ("!AP16", AP16, "X")
This causes any WAV file that may be playing to immediately stop. Not only is it a good idea to send this command at the beginning of your program to make sure that the
is ready to receive commands, but this command is also the best way to silence the
if you want to stop it before the current file finishes playing.
Changing the volume
If you want, you can change the output volume from your program. This is useful if you want to play a file at less than full volume. It’s also useful if you want the sound output to come from one side of the room or the other.
To change the output volume, use the L command. The syntax of the L command is this:
"!AP16", address
, "L", left
, right
Where left
and right
are values between 0 and 100 that indicate the percentage volume for the left and right outputs, respectively.
For example, to set the output volume to 50% for both left and right, use this statement:
SEROUT Sio, Baud, ("!AP16", AP16, "L", 50, 50)
To make the sound come exclusively from the left channel, use this:
SEROUT Sio, Baud, ("!AP16", AP16, "L", 100, 0)
To restore the sound to full volume, use this statement:
SEROUT Sio, Baud, ("!AP16", AP16, "L", 100, 100)
Playing a specific file
To play a specific WAV file, use the PW command. Here’s the syntax:
"!AP16", address
, "PW", name,
13, loops
The name
parameter is the name of the file, without the .wav
extension. The 13 is required because of a quirk in the way the
programming works. Think of it as a good luck charm!
The loops
parameter indicates how many times the file should be repeated. Normally, you’ll just specify 1 to play the file once. The maximum is 255, but specify 0 if you want the file to keep playing forever — or at least until you reset the
with an X command or use another PW command to play a different file.
Here’s the command to play a file named scream1.wav
just once:
Note that whenever you play a sound file, any other sound file that happens to be playing is immediately stopped. Thus, you don’t have to wait for one sound file to end to play another.
Waiting for a file to finish playing
When you play a sound file, you will often want your program to wait until the sound file finishes playing. You could do that with a PAUSE command if you know exactly how long the sound is. But what if you aren’t sure?
Fortunately, the
includes a G command that gets the current status of the card. To use this command, you must first send the G command to the
with a SEROUT statement. Then, you must retrieve the status result by using a SERIN statement.
The SERIN statement is pretty straightforward: Its syntax looks like this:
SERIN pin, mode, variable
The pin
and mode
parameters are the same as for the SEROUT statement. The variable
parameter is simply the name of a variable you have set aside to receive the status result.
Here’s how you can use the SEROUT and SERIN statements together to get the status of an
:
In this example, the SYMBOL statement equates the name ap16status with the variable B0. Then, the SEROUT statement sends a G command to the
and the SERIN statement retrieves the status data in the variable named ap16Status.
The status data includes a variety of useful information, but in nearly every case the only thing you really want to know is whether the
is currently playing a sound. You can find that out by testing bit 7 of the status byte. The easiest way to do that is to define a symbol using the Basic Stamp’s predefined bit-variables, as in this example:
SYMBOL ap16Status = B0 SYMBOL ap16Playing = BIT7
Then, you can simply test the ap16Playing variable, like this:
IF ap16Playing = 0 THEN SoundDone
This statement will branch to the label SoundDone if the
has finished playing the sound.
Here is a complete snippet of code that plays a sound and then locks itself in a loop until the sound is finished playing:
Listing 3-2
shows a complete PBASIC program that plays sounds on an
card. The program plays the sound weasel.wav
for 10 seconds, and then plays the scream.wav
sound until that sound ends. Then it repeats. You can download this program from this book’s companion website.
΄ {$STAMP BS1} ΄ {$PBASIC 1.0} SYMBOL Sio = 7 SYMBOL Baud = OT2400 SYMBOL AP16 = 0 SYMBOL ap16Status = B0 SYMBOL ap16Playing = BIT7 ΄Reset the card SEROUT Sio, Baud, ("!AP16", AP16, "X")
Main: ΄Play Pop Goes the Weasel SEROUT Sio, Baud, ("!AP16", AP16, "PW", "WEASEL", 13, 0) ΄Wait 10 seconds PAUSE 10000 ΄Play the scream SEROUT Sio, Baud, ("!AP16", AP16, "PW", "SCREAM", 13, 1) ΄Wait for the scream to end StillScreaming: SEROUT Sio, Baud, ("!AP16", AP16, "G") SERIN Sio, Baud, ap16Status IF ap16Playing = 1 THEN StillScreaming ΄Do it again GOTO Main
Programming the PIR Motion Detector
The PIR sensor uses infrared light to detect motion. It sends a 1 to the microcontroller when such motion is detected.
At first glance, then, you would think that the PIR sensor is pretty easy to use. Just plug it into one of the Basic Stamp’s I/O pins and wait for that pin to have a value of 1 to trigger your prop. The code would look something like this, assuming that Pir is a symbol assigned to the I/O pin that the PIR is connected to:
WaitForMovement: IF Pir = 0 THEN WaitForMovement MovementDetected: ‘Activate your prop now!
Unfortunately, life isn’t that easy where PIR motion detection is concerned. For starters, the PIR won’t be reliable for a while when power is first applied. Thus, any program that uses a PIR to detect motion should start with an immediate 60-second pause. This gives the PIR time to settle down so it can reliably detect motion.
Second, the PIR will often send very brief false triggers when there’s no actual motion present in the room. The usual way to get around this problem is to wait until the PIR’s value is 1 for a quarter of a second before triggering your prop.
You can do this with a tricky bit of code:
SYMBOL Pir = PIN6 SYMBOL waitTimer = B2 PAUSE 60000 Main: waitTimer = 0 WaitForMotion: PAUSE 10 waitTimer = waitTimer + Pir * Pir IF waitTimer < 25 THEN WaitForMotion 'The PIR has detected motion for 0.25 seconds 'so the prop can now be triggered
The cleverness in this bit of code is that the WaitForMotion loop pauses for 10 milliseconds, then adds the value of the PIR input status to the waitTimer variable while at the same time multiplying the result by the status of the PIR input. If the PIR input is 0, multiplying by the input status resets the waitTimer variable to 0 because any number times zero is zero. So this loop won’t exit until the PIR has detected motion consistently for a quarter of a second.
Looking at Complete Jack-in-the-Box Program
Now that you’ve seen the techniques for programming the individual components of the prop controller, put them together to create a program for an actual prop. Listing 3-3
shows the complete program for the jack-in-the-box prop. I made liberal use of comments throughout this program, so you should have no trouble following its basic operation. (The program is available for download at this book’s companion website.)
' {$STAMP BS1} ' {$PBASIC 1.0} ' Jack-in-the-Box Program ' ' The following devices are connected to the prop controller for this prop ' ' Pin 6 PIR Sensor ' ' Pin 7 RC-4 Address %00 ' AP-16+ Address %00 ' ' RC-4 Relay 1 Pneumatic Solenoid Valve to open prop ' Light to illuminate clown ' ' RC-4 Relay 2 Motor to turn crank handle ' ' ' AP-16+ Sound Files ' ' WEASEL.WAV Pop Goes the Weasel to be played while motor is running ' SCREAM.WAV Scream to play when clown pops up ' The action of the prop is as follows: ' ' Turn the crank arm motor and play "Pop Goes the Weasel" until ' motion is detected in the room. ' ' When motion is detected, pop up the clown and play the scream sound. ' ' When the scream sound ends, retract the clown, wait 2 seconds, ' and then resume the crank motor and "Pop Goes the Weasel." ' ' Wait at least 10 seconds before triggering the prop again. SYMBOL Sio = 7 SYMBOL Baud = OT2400 SYMBOL RC4 = 3 SYMBOL RelayValve = 1 SYMBOL RelayMotor = 2 SYMBOL RelayOn = 1 SYMBOL RelayOff = 0 SYMBOL AP16 = 0 SYMBOL ap16Status = B0 SYMBOL ap16Playing = BIT7 SYMBOL Pir = PIN6 SYMBOL waitTimer = B2 'Reset everything & pause one minute to let the PIR stabilize. SEROUT Sio, Baud, ("!AP16", AP16, "X") SEROUT Sio, Baud, ("!RC4", RC4, "X") PAUSE 50000 Main: 'Play Pop Goes the Weasel in an indefinite loop. SEROUT Sio, Baud, ("!AP16", AP16, "PW", "WEASEL", 13, 0) 'Start the motor. SEROUT Sio, Baud, ("!RC4", RC4, "R", RelayMotor, RelayOn) 'Wait 10 seconds for the room to clear. PAUSE 10000 'Wait for the PIR to trigger for 0.25 seconds. waitTimer = 0 WaitForMotion: PAUSE 10 waitTimer = waitTimer + Pir * Pir IF waitTimer < 25 THEN WaitForMotion 'At this point the trigger has been activated.
'Stop the motor. SEROUT Sio, Baud, ("!RC4", RC4, "R", RelayMotor, RelayOff) 'Play the scream. SEROUT Sio, Baud, ("!AP16", AP16, "PW", "SCREAM", 13, 1) 'Pop up the clown. SEROUT Sio, Baud, ("!RC4", RC4, "R", RelayValve, RelayOn) 'Wait for the scream to end. StillScreaming: SEROUT Sio, Baud, ("!AP16", AP16, "G") SERIN Sio, Baud, ap16Status IF ap16Playing = 1 THEN StillScreaming 'Retract the clown. SEROUT Sio, Baud, ("!RC4", RC4, "R", RelayValve, RelayOff) 'Wait 2 seconds. PAUSE 2000 'Do it again. GOTO Main
 Considering control requirements for animatronic props
Considering control requirements for animatronic props
 Animatronics should be built and used with care, as they can be dangerous. You must ensure that no one who views your animatronic will be exposed to any danger, such as loose electrical connections or faulty compressed-air fittings. Make sure you place your finished animatronic in a secure area where no one will be able to touch it, and make sure that all electrical and compressed-air fittings are completely secure.
Animatronics should be built and used with care, as they can be dangerous. You must ensure that no one who views your animatronic will be exposed to any danger, such as loose electrical connections or faulty compressed-air fittings. Make sure you place your finished animatronic in a secure area where no one will be able to touch it, and make sure that all electrical and compressed-air fittings are completely secure. sound board, which can be programmed to play sounds saved on a standard SD memory card.
sound board, which can be programmed to play sounds saved on a standard SD memory card. EFX-TEK has recently replaced its RC-4 relay board with a new and improved version called the
EFX-TEK has recently replaced its RC-4 relay board with a new and improved version called the  . The
. The  is compatible with the
is compatible with the  , so you can build the prop controller using either board.
, so you can build the prop controller using either board.
 -inch plywood, reinforced inside with
-inch plywood, reinforced inside with  -inch lumber. I was able to cut all six sides and the lid out of a single
-inch lumber. I was able to cut all six sides and the lid out of a single  -foot sheet of plywood.
-foot sheet of plywood.
 -inch sheet of Plexiglas, which you can purchase from most hardware stores. Before mounting the components on Plexiglas, spray-paint the back of the Plexiglas black to create a nice, professional-looking board.
-inch sheet of Plexiglas, which you can purchase from most hardware stores. Before mounting the components on Plexiglas, spray-paint the back of the Plexiglas black to create a nice, professional-looking board.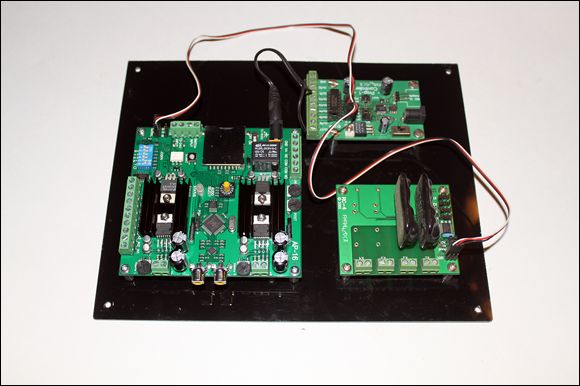
 audio player
audio player -inch stand-offs and eight 4-40 machine screws)
-inch stand-offs and eight 4-40 machine screws) -inch sheet of
-inch sheet of  -inch Plexiglas
-inch Plexiglas audio player:
At $129.95, the audio player is the most expensive component of the prop controller. However, sound is an essential element of any good prop, and the
audio player:
At $129.95, the audio player is the most expensive component of the prop controller. However, sound is an essential element of any good prop, and the  is an extremely versatile sound player. It can play sounds in WAV format directly from a micro-SD card and includes a built-in 20 W amplifier, so you can connect speakers directly to the
is an extremely versatile sound player. It can play sounds in WAV format directly from a micro-SD card and includes a built-in 20 W amplifier, so you can connect speakers directly to the  without using a separate amplifier. The
without using a separate amplifier. The  also connects to the Prop-1 via a three-pin servo cable. This connection allows the Prop-1 to send commands to the
also connects to the Prop-1 via a three-pin servo cable. This connection allows the Prop-1 to send commands to the  to tell the
to tell the  to play specific sound files on the micro-SD card.
to play specific sound files on the micro-SD card. ). Use a
). Use a  -inch drill bit.
-inch drill bit.  board on the Plexiglas.
board on the Plexiglas.
 board so that the audio output connectors are at the bottom of the board as oriented in
board so that the audio output connectors are at the bottom of the board as oriented in  and GND terminals on the Prop-1 to the
and GND terminals on the Prop-1 to the
 and GND terminals on the
and GND terminals on the
 board.
board.
 board. After test-fitting the wires, cut them to the correct length and strip
board. After test-fitting the wires, cut them to the correct length and strip  inch of insulation off each end. Then insert each end of the wire into the appropriate screw terminal and tighten the screw to ensure a solid connection.
inch of insulation off each end. Then insert each end of the wire into the appropriate screw terminal and tighten the screw to ensure a solid connection. board.
board.
 audio player to tell it when to play its sounds.
audio player to tell it when to play its sounds. board. The pins on the
board. The pins on the  headers are labeled W, R, and B, so you should have no trouble orienting the wire colors. As with the RC-4, there are two SERIAL headers on the
headers are labeled W, R, and B, so you should have no trouble orienting the wire colors. As with the RC-4, there are two SERIAL headers on the  ; it doesn’t matter which of them you use.
; it doesn’t matter which of them you use.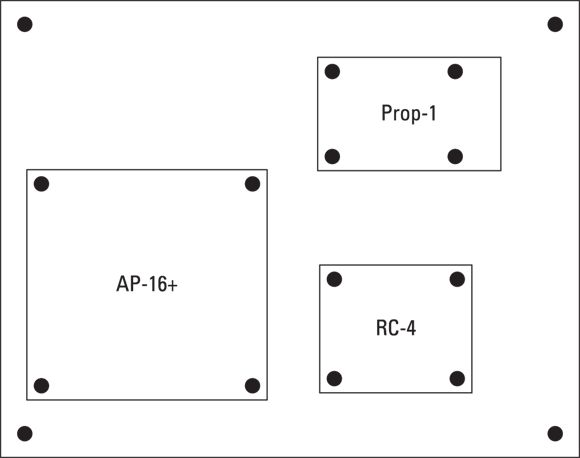
 Modules
Modules modules. The SEROUT command sends data to an external device that’s connected to the Prop-1 controller via one of the I/O pins. It uses a very simple serial communications protocol to accomplish this. Fortunately, you don’t need to worry about the details of how the serial communications protocol works to use the SEROUT command to talk to an RC-4 or
modules. The SEROUT command sends data to an external device that’s connected to the Prop-1 controller via one of the I/O pins. It uses a very simple serial communications protocol to accomplish this. Fortunately, you don’t need to worry about the details of how the serial communications protocol works to use the SEROUT command to talk to an RC-4 or  module. But you do need to know how to use the SEROUT command.
module. But you do need to know how to use the SEROUT command. modules are connected to PIN7 in the animatronic prop controller, you’ll simply specify PIN7 for this parameter.
modules are connected to PIN7 in the animatronic prop controller, you’ll simply specify PIN7 for this parameter. modules.
modules. It’s a good idea to assign a symbol to the I/O pin to which the RC-4 and
It’s a good idea to assign a symbol to the I/O pin to which the RC-4 and  modules are attached, and to the communication mode. For example:
modules are attached, and to the communication mode. For example: Audio Player Module
Audio Player Module audio player module is an amazingly versatile way to add sound to your animatronic prop. Like the RC-4, you communicate with the
audio player module is an amazingly versatile way to add sound to your animatronic prop. Like the RC-4, you communicate with the  module using serial communication via the SEROUT statement. Some commands cause the
module using serial communication via the SEROUT statement. Some commands cause the  module to return data, which you can retrieve with the SERIN statement. But for most props, all you have to do is send a few commands using SEROUT, so you can dispense with the SERIN statement.
module to return data, which you can retrieve with the SERIN statement. But for most props, all you have to do is send a few commands using SEROUT, so you can dispense with the SERIN statement. board can play sounds recorded in WAV format stored on a micro-SD card. So before you program your prop, you’ll need to prepare a micro-SD card with the files you want the prop to play. You can simply use your computer to copy the files to the micro-SD card; the only restriction is that the filenames must be no longer than eight characters, and the filename extension must be
board can play sounds recorded in WAV format stored on a micro-SD card. So before you program your prop, you’ll need to prepare a micro-SD card with the files you want the prop to play. You can simply use your computer to copy the files to the micro-SD card; the only restriction is that the filenames must be no longer than eight characters, and the filename extension must be  card can’t play MP3 files.)
card can’t play MP3 files.) is an extremely versatile card that’s designed to be usable in stand-alone mode — that is, not controlled by a microcontroller. Many of its features are useful primarily in stand-alone mode. For example, you can store files on the micro-SD card with predefined filenames such as
is an extremely versatile card that’s designed to be usable in stand-alone mode — that is, not controlled by a microcontroller. Many of its features are useful primarily in stand-alone mode. For example, you can store files on the micro-SD card with predefined filenames such as  can be configured to automatically play these files in random ways in response to direct trigger inputs on the card. The
can be configured to automatically play these files in random ways in response to direct trigger inputs on the card. The  can also be configured to play an ambient background sound whose filename must be
can also be configured to play an ambient background sound whose filename must be  documentation supplied by EFX-TEK to see how these features work.
documentation supplied by EFX-TEK to see how these features work. module from a Prop-1 controller, you use the SEROUT command to send data to the pin that the
module from a Prop-1 controller, you use the SEROUT command to send data to the pin that the  is connected to. The data that you send must follow this format:
is connected to. The data that you send must follow this format: module. This allows you to chain different kinds of modules together with the
module. This allows you to chain different kinds of modules together with the  , making it possible to control all the modules used in a project from a single I/O pin.
, making it possible to control all the modules used in a project from a single I/O pin. module you want to send the command to. The possible values are 0, 1, 2, or 3. The address is set by a pair of jumpers on the
module you want to send the command to. The possible values are 0, 1, 2, or 3. The address is set by a pair of jumpers on the  board. For the examples in this section, I assume the
board. For the examples in this section, I assume the  address is 0.
address is 0. , which stops any sound that may be playing.
, which stops any sound that may be playing. card. Use the SERIN command to read a single byte that indicates whether the
card. Use the SERIN command to read a single byte that indicates whether the  is currently playing a sound file and, if so, which sound file is being played.
is currently playing a sound file and, if so, which sound file is being played. version information. The version information can be read with a SERIN command.
version information. The version information can be read with a SERIN command.
 commands you’ll use most are X, to reset the sound player and stop any sound that may be playing; L to set the output volume; PW, to play a specific file; and G, to get the current status of the
commands you’ll use most are X, to reset the sound player and stop any sound that may be playing; L to set the output volume; PW, to play a specific file; and G, to get the current status of the  so you can find out if it has finished playing a sound file. These commands are described in the following sections.
so you can find out if it has finished playing a sound file. These commands are described in the following sections.
 , send an X command like this:
, send an X command like this: is ready to receive commands, but this command is also the best way to silence the
is ready to receive commands, but this command is also the best way to silence the  if you want to stop it before the current file finishes playing.
if you want to stop it before the current file finishes playing. programming works. Think of it as a good luck charm!
programming works. Think of it as a good luck charm! with an X command or use another PW command to play a different file.
with an X command or use another PW command to play a different file. includes a G command that gets the current status of the card. To use this command, you must first send the G command to the
includes a G command that gets the current status of the card. To use this command, you must first send the G command to the  with a SEROUT statement. Then, you must retrieve the status result by using a SERIN statement.
with a SEROUT statement. Then, you must retrieve the status result by using a SERIN statement. :
: and the SERIN statement retrieves the status data in the variable named ap16Status.
and the SERIN statement retrieves the status data in the variable named ap16Status. is currently playing a sound. You can find that out by testing bit 7 of the status byte. The easiest way to do that is to define a symbol using the Basic Stamp’s predefined bit-variables, as in this example:
is currently playing a sound. You can find that out by testing bit 7 of the status byte. The easiest way to do that is to define a symbol using the Basic Stamp’s predefined bit-variables, as in this example: has finished playing the sound.
has finished playing the sound. program
program card. The program plays the sound
card. The program plays the sound  Program
Program