11
¿Falta mucho?
Un viaje de mil millas comienza con un solo paso.
LAO-TSE,
El camino de Lao-tse
Todos los padres que conducen conocen la situación. La familia va a visitar a la abuela, a 500 kilómetros de distancia y seis horas de carretera. Los niños van en el asiento de atrás. Solo ha pasado media hora desde que comenzó el viaje, cuando empiezan a quejarse: «¿Falta mucho?».
Tengo una cuenta pendiente con mis primos transatlánticos, que parecen estar convencidos de que la frase es: «¿Ya llegamos?». Sin duda, lo es en algunas partes de América, pero no debería serlo, porque está claro que esta variante es el resultado de un malentendido. La respuesta a esta segunda versión es siempre evidente: o bien hemos llegado ya y es irrelevante, o no lo hemos hecho y no tiene sentido preguntarlo. No, lo que ocurrió fue que, durante un viaje largo cualquiera, cuando los niños estaban inquietos, sus padres les tranquilizaron con amabilidad (o puede ser que solo con hastío). «Ya casi hemos llegado.» Aunque faltasen todavía cinco horas para hacerlo. Con eso los mantenían callados durante un rato. Sea como fuere, después de varios viajes, los niños empezaron a dejar caer discretas indirectas, presa de la desesperación más que esperanzados: «¿Ya casi llegamos?». Es una pregunta razonable, porque no puede saberse solo con mirar por la ventanilla. A no ser que alguien conozca el paisaje, por supuesto. Tuvimos un gato que lo hacía.
¿Falta mucho? ¿Dónde estamos? Hace dos décadas se necesitaba un mapa, capacidad de entenderlo y alguien en el asiento del copiloto para saberlo. En la actualidad, todo se confía a la magia de la electrónica. Se consulta el navegador por satélite. Es verdad, a veces se acaba en mitad de la nada. Hace poco, un coche se metió en un río, gracias a las indicaciones cortesía del aparato. No se le puede quitar el ojo a la carretera. Aunque incluso eso falla a veces. El año pasado acabamos en los jardines de una casa de campo mientras buscábamos un hotel rural, porque el navegador no podía distinguir entre una carretera de verdad que parecía la entrada a una finca y la entrada a una finca que parecía una carretera de verdad.
La navegación por satélite parece cosa de magia. Hay una pantalla en el coche que muestra parte de un mapa y que indica con exactitud dónde se encuentra el automóvil. Al conducir, la imagen se desplaza de modo que el símbolo del vehículo está siempre en el lugar correcto. El dispositivo sabe en qué dirección va el coche y el nombre o número de la calle en la que se halla en ese momento. Avisa de los atascos. Conoce el destino, la velocidad y cuándo se supera el límite, dónde están los radares y cuánto falta para llegar. Solo hay que enseñar a los niños a leer estos datos y no necesitarán volver a preguntar nunca.
Como escribió el gran autor de ciencia ficción y futurólogo Arthur C. Clarke: «Cualquier tecnología lo suficientemente avanzada es indistinguible de la magia». Otro escritor del mismo género, Gregory Benford, lo reformuló como: «Cualquier tecnología distinguible de la magia no es lo suficientemente avanzada». La navegación por satélite es lo bastante avanzada, pero no es magia. ¿Cómo funciona?
Conoce el destino porque se le dice. Se pulsan letras y números en la pantalla. Eso es obvio. También es verdad que es la única parte evidente. La magia restante se basa en una tecnología compleja: satélites en órbita, muchos; señales de radio; codificaciones; números pseudoaleatorios; procesamiento informático complejo en grandes cantidades. Hay algoritmos para encontrar la ruta más rápida/barata y menos dañina desde el punto de vista del medioambiente. La física fundamental es imprescindible: mecánica orbital basada en la ley de Newton de la gravitación universal, complementada por las teorías especial y general de la relatividad de Einstein, que refinan la interpretación clásica. Los satélites dan vueltas en el espacio y transmiten señales temporales. En el otro extremo, en el coche, casi todo ocurre en un minúsculo circuito impreso de ordenador. Más unos cuantos chips de memoria para almacenar el mapa y cosas así.
No se ve ninguna de estas cosas, así que parece cosa de magia.
No hace falta decir que buena parte de esta brujería es matemática y que requiere amplias dosis de cálculos de muchos tipos, por no mencionar las ingentes cantidades de física, química, ciencia de materiales e ingeniería. Algo de tratamiento psiquiátrico sería también una buena idea para algunos usuarios, pero qué se le va a hacer.
Si se pasan por alto la fabricación y el diseño de satélites, junto con la tecnología necesaria para lanzarlos al espacio, un navegador requiere todavía al menos siete ramas de las matemáticas sin las cuales no podría funcionar. Las que tengo en mente son:
- Calcular las trayectorias de los cohetes de lanzamiento para poner los satélites en órbita.
- Diseñar un conjunto de órbitas que proporcionen buena cobertura: por lo menos tres satélites, y preferiblemente más, deben ser visibles desde cualquier ubicación dada en todo momento.
- Emplear un generador de números pseudoaleatorios para crear señales, lo que hace posible medir con mucha precisión la distancia a la que se encuentra cada satélite.
- Emplear la trigonometría y los datos orbitales para determinar la ubicación del coche.
- Emplear las ecuaciones de la relatividad especial para corregir los cálculos debido al efecto de las altas velocidades de los satélites sobre el paso del tiempo.
- Emplear las ecuaciones de la relatividad general para corregir los cálculos debido al efecto de la gravedad terrestre sobre el paso del tiempo.
- Resolver una variante del problema de la persona viajante para encontrar la mejor ruta conforme al criterio que se haya seleccionado: rápida, corta, respetuosa con el medioambiente.
Consideraré la mayor parte de ellas con más detalle en las siguientes páginas y me concentraré en las más sorprendentes.
*
La navegación por satélite depende de señales temporales de una exactitud increíble producidas por relojes atómicos muy precisos y enviadas desde una cierta cantidad de satélites especiales en órbita. Un cronómetro de cesio, dejado a su suerte, tiene una precisión de 5 partes en 1014, o de cuatro nanosegundos por día. Eso corresponde a un error en la posición del vehículo de cerca de un metro diario. Se compensa esta desviación gradual ajustando los relojes de manera periódica desde la estación de seguimiento en tierra. Hay otras fuentes de errores en estos instrumentos de las que hablaré más adelante.
En la actualidad, hay varios sistemas de navegación por satélite, pero me concentraré en el primero y el de uso más generalizado, el Sistema de Posicionamiento Global o GPS. El proyecto comenzó en 1973 a iniciativa del Departamento de Defensa de Estados Unidos. El núcleo de su estructura es un conjunto de satélites en órbita: al principio eran 24, ahora hay 31. El primer prototipo se lanzó en 1978 y el conjunto completo estaba operativo en 1993. En un primer momento, el servicio estaba limitado a usos militares, pero una orden ejecutiva del presidente Ronald Reagan en 1983 lo puso a disposición de los civiles en un formato de menor resolución. El GPS se halla en un proceso de mejora y varios países disponen ahora de sus propios sistemas de posicionamiento por satélite, empezando por el Sistema Global de Navegación por Satélite (GLONASS) de Rusia, con una precisión de hasta dos metros. En 2018, China inició su Sistema de Navegación por Satélite BeiDou, que debería estar a pleno rendimiento en cualquier momento a partir de ahora. El equivalente de la Unión Europea se llama Galileo. Como el Reino Unido ha dejado la UE no formará parte de él, pero en un triunfo de la ideología sobre el sentido común, el Gobierno británico ha anunciado que desarrollará y pondrá en órbita su propia versión. La India está creando NavInc y Japón construye el Sistema por Satélite Cuasicenital (QZSS), con el que eliminará su dependencia del GPS en 2023.
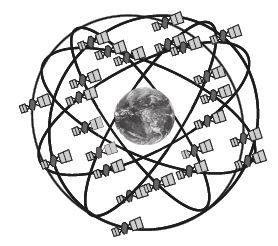
Constelación original de 24 satélites del GPS, cuatro de ellos en cada una de seis órbitas distintas.
Wikipedia
Desde un punto de vista funcional, la estructura de este último comprende tres «segmentos»: el espacial (los satélites), el de control (estaciones de seguimiento en tierra) y el del usuario (el conductor en el coche). Los primeros envían señales temporales. El segmento de control vigila las órbitas y la precisión de los relojes y si es necesario transmite instrucciones para modificar unas y ajustar los otros. El usuario dispone de un receptor barato de baja potencia, lo bastante pequeño como para caber dentro de un teléfono móvil, que dice a la aplicación dónde se encuentra.
El conjunto de satélites se denomina en general una «constelación», el nombre que reciben desde tiempo inmemorial las disposiciones de estrellas en el cielo nocturno. La constelación original del GPS comprende 24 elementos, cada uno en una órbita aproximadamente circular a 20.200 kilómetros por encima de la Tierra, o 26.600 kilómetros de su centro. Pasaré por alto los satélites adicionales posteriores porque no afectan a la idea principal; tan solo hacen que el sistema sea más confiable y preciso. Hay seis órbitas en planos que cruzan el ecuador en un ángulo de 55º, separadas de manera regular en torno a este. Cada una de ellas está ocupada por cuatro satélites separados entre sí una distancia similar, que se persiguen de manera permanente. El radio de la órbita se elige mediante el empleo de matemáticas orbitales, de modo que el satélite regresa a la misma posición y completa una vuelta cada 11 horas y 58 minutos. Con esto se garantiza que se halla por encima de (casi) la misma ubicación en la Tierra dos veces al día, aunque se desvía con lentitud.
El siguiente prodigio matemático es la geometría de las órbitas. Esta configuración de la constelación implica que al menos seis de los satélites son visibles en todo momento (es decir, que se pueden recibir sus señales) desde cualquier punto del planeta. Cuáles de ellos, en concreto, depende de dónde esté el receptor y, además, este conjunto cambia con el paso del tiempo, porque la Tierra rota y los satélites giran en sus órbitas.
El GPS está diseñado de modo que los usuarios no necesitan transmitir información alguna. En su lugar, tienen un receptor que recoge las señales temporales de los satélites que son visibles. El aparato procesa los datos temporales para calcular dónde se encuentra. El principio básico es sencillo, así que veámoslo primero. Después señalaré algunos de los ajustes necesarios para que funcione en el mundo real.
Empecemos con un satélite. Envía señales temporales a partir de las cuales el receptor calcula a qué distancia se encuentra del emisor en ese instante. (Más adelante se verá cómo hace esta deducción.) Tal vez sean 21.000 kilómetros. Esta información lo coloca en la superficie de una esfera, centrada en el satélite y con un radio de 21.000 kilómetros. Esto no es algo de una utilidad pasmosa en sí mismo, pero hay al menos otros cinco emisores visibles al mismo tiempo. Me permitiré denominarlos satélite 2, satélite 3 y así hasta el satélite 6. Cada uno transmite señales que se reciben de manera simultánea y cada una de estas sitúa al receptor en otra esfera, centrada también en el satélite correspondiente: esferas 2, 3, 4, 5 y 6. La señal del satélite 2, combinada con la del 1, sitúa al receptor en la intersección de las esferas 1 y 2, que es una circunferencia. El satélite 3 aporta otra esfera, que se cruza con la 1 en otra circunferencia. Ambas circunferencias se cortan a su vez en dos puntos, cada uno de los cuales pertenece a las tres esferas. La señal del satélite 4 proporciona la esfera 4, que en general suele discernir cuál de los dos puntos es la ubicación correcta.
En un mundo perfecto se podría parar aquí y los elementos 5 y 6 serían superfluos. En realidad, no es tan sencillo. Todo adolece de errores. La atmósfera de la Tierra puede degradar la señal, tal vez haya interferencias eléctricas, lo que sea. Para empezar, eso implica que la ubicación está cerca de la esfera en cuestión, más que sobre ella. En lugar de situarse justo en su superficie, se halla dentro de un cascarón de pared gruesa que la contiene. De modo que cuatro satélites y cuatro señales son suficientes para localizar el receptor hasta un cierto nivel de precisión, pero no a la perfección. Para mejorar esto, el GPS emplea los elementos adicionales. Sus esferas de pared gruesa recortan la región en porciones todavía más pequeñas. Llegados a este punto, las ecuaciones que determinan la ubicación son, casi con certeza, inconsistentes si se ignoran los errores más probables, pero si se toma prestado un viejo truco de la estadística, es posible calcular la mejor estimación de la localización y reducir al mínimo la imprecisión total. Este se denomina el método de los mínimos cuadrados y fue desarrollado por Gauss en 1795.
La conclusión es que el receptor de GPS solo tiene que hacer una serie sistemática de cálculos geométricos relativamente sencillos, lo que lleva a la mejor estimación posible de la ubicación. Al comparar esta con la forma detallada de la Tierra, puede incluso calcular la altura relativa al nivel del mar. En general, las alturas son menos precisas que las posiciones en latitud y longitud.
*
Tal vez «enviar señales temporales» parezca sencillo, pero no lo es. Si se oye un trueno, se sabe que hay una tormenta cerca, pero el ruido en sí mismo no dice a qué distancia se encuentra. Si además se ve el relámpago, que llega antes que el trueno porque la luz viaja más rápido que el sonido, puede emplearse la diferencia temporal entre las dos señales para estimar la distancia a la que estaba la tormenta (a ojo de buen cubero son tres segundos por kilómetro). No obstante, la velocidad del sonido depende del estado de la atmósfera, por lo que esta regla no tiene una precisión absoluta.
El GPS no puede emplear ondas sonoras como una segunda señal, por razones obvias: serían demasiado lentas y, de todos modos, el espacio es un vacío en el que no se transmite el sonido. Pero la idea subyacente de que es posible inferir una diferencia temporal al comparar dos señales distintas pero relacionadas, apunta en la dirección correcta. Cada satélite envía una secuencia de pulsos de 0 y 1 que no contiene repeticiones, a no ser que se espere un tiempo muy largo para que vuelva a empezar toda la cadena. El receptor de GPS es capaz de comparar la sucesión de 0 y 1 que le llega desde el satélite con la misma cadena generada por una fuente local. La primera tiene un retraso temporal porque debe salvar la distancia entre el emisor y el receptor y es posible calcular su valor al alinear las señales y ver cuánto hay que desplazar una para que coincida con la otra.
Este proceso puede ilustrarse con palabras de este libro en lugar de 0 y 1.
Supongamos que la señal recibida del satélite es:
alinear las señales y ver cuánto hay,
mientras que, al mismo tiempo, la cadena de referencia desde un lugar cercano es:
ver cuánto hay que desplazar una para...
Puede desplazarse la señal local hasta que coincidan las palabras, de este modo:
alinear las señales y ver cuánto hay
ver cuánto hay que desplazar una para...
Ahora se ve que la secuencia del satélite llega cuatro palabras más tarde que la local.
Todo lo que queda por hacer es generar cadenas de bits adecuadas. Una forma sencilla de obtener combinaciones de 0 y 1 con repeticiones muy poco frecuentes es lanzar una moneda millones de veces y apuntar 0 cuando sale cara y 1 cuando sale cruz. Cada bit tiene una probabilidad de 1/2, de modo que una secuencia concreta de digamos 50 dígitos tiene una probabilidad de 1/250, que está en torno a uno entre mil billones. En promedio, se repetirá dentro de cerca de mil billones de pasos en la cadena. Cuando se compara una señal así con una versión desplazada una distancia mucho más pequeña, el desplazamiento «correcto», que produce la correspondencia óptima, es único.
No obstante, los ordenadores no son buenos arrojando monedas. Siguen instrucciones concretas y precisamente se trata de que lo hagan de manera exacta y sin errores. Por suerte, hay procesos matemáticos rigurosos que pueden generar cadenas de bits que parecen aleatorias, en todos los sentidos estadísticos razonables, incluso aunque el procedimiento en sí sea determinista. Tal método se conoce como generador de números pseudoaleatorios. Este es el tercer ingrediente matemático principal del GPS.
En la práctica, la cadena de bits del generador de números pseudoaleatorios se combina con otros datos que requiere el sistema, en una técnica denominada modulación. El satélite emite su secuencia a un ritmo relativamente bajo de 50 dígitos por segundo. Combina esta señal con una cadena de bits mucho más rápida del generador de números pseudoaleatorios, que tiene un ritmo de más de un millón de chips por segundo. Un chip es algo muy parecido a un bit pero que toma los valores +1 y – 1 en lugar de 0 o 1. Desde el punto de vista físico, es un pulso de onda cuadrada con amplitud +1 o – 1. «Modulación» quiere decir que la cadena de datos original se multiplica por el valor del chip en cada instante. Dado que, en comparación, la otra secuencia cambia con mucha lentitud, la técnica de «desplazar y buscar la coincidencia» funciona todavía bastante bien, aunque en ocasiones la correspondencia es idéntica y a veces una señal es el negativo de la otra. Mediante el empleo del método estadístico de correlación, no hay más que desplazar las señales hasta que la correlación sea lo bastante alta.
De hecho, el GPS hace lo mismo de nuevo con otro número pseudoaleatorio y modula la señal a un ritmo diez veces más rápido. El más lento se denomina código de adquisición gruesa y es de uso civil. El más rápido, el código preciso, está reservado para el ejército. También está encriptado y tarda siete días en repetirse.
Los generadores de números pseudoaleatorios se basan de manera general en el álgebra abstracta, tal como polinomios sobre campos finitos, o en la teoría de números, tal como enteros en algún módulo. Un ejemplo sencillo de estos últimos es un generador lineal congruencial. Se elige algún módulo m, dos números a y b (mod m) y una cantidad inicial x1 (mod m). Después se definen otras sucesivas x2, x3, x4, etcétera, mediante la fórmula
xn+1 = axn + b (mod m)
El efecto de a es multiplicar el número actual xn por un factor constante a y después b desplaza ese valor una cantidad fija. Esto proporciona el siguiente elemento de la secuencia y se realiza el proceso de nuevo. Por ejemplo, si m = 17, a = 3, b = 5 y x1 = 1, entonces se obtiene la sucesión
1 8 12 7 9 15 16 2 11 4 0 5 3 14 13 10
que se repite de manera indefinida. Esta no contiene patrones evidentes a simple vista. Por supuesto, en la práctica se toma un m mucho mayor. Hay algunas condiciones matemáticas que garantizan que la secuencia tarda mucho en repetirse y que satisface las pruebas estadísticas razonables de aleatoriedad. Por ejemplo, tras pasar el resultado a binario, cada número (mod m) debería aparecer igual cantidad de veces en promedio y lo mismo debería ocurrir para cada cadena de 0 y 1 de una longitud dada hasta algún tamaño razonable.
Los generadores lineales congruenciales son demasiado sencillos para ser seguros y se han desarrollado variantes más complejas. Un ejemplo es el Mersenne twister, inventado en 1997 por Makoto Matsumoto. Muchas personas tienen uno, ya que se emplea en docenas de paquetes de software comunes, entre ellos, en las hojas de cálculo de Microsoft Excel. Este método combina los números primos, lo que hace que las matemáticas sean más sencillas, con expresiones binarias adecuadas, lo que hace que los cálculos informáticos sean más fáciles. Un primo de Mersenne es un primo de la forma 2p – 1 (con p un primo), tal como 31 = 25 – 1 o 131.071 = 217 – 1. Son números raros y ni siquiera se sabe si hay una cantidad infinita de ellos. En enero de 2021 se conocen exactamente 51 primos de Mersenne, el mayor de los cuales es 282.589.933 – 1.
Expresados en binario, los dos ejemplos anteriores son
31 = 11111 131.071 = 11111111111111111
con cinco y diecisiete 1 repetidos respectivamente. Esto hace que un ordenador digital los pueda emplear en cálculos con facilidad. El Mersenne twister se basa en un primo de Mersenne muy grande, habitualmente 219.937 – 1, y sustituye los números en la congruencia por matrices sobre el campo con dos elementos 0 y 1. Satisface las pruebas estadísticas para fragmentos de cadena de hasta 623 bits de longitud.
La señal de GPS también incorpora una emisión de frecuencia mucho más baja que aporta información acerca de la órbita del satélite, de las correcciones de su reloj y de otros factores que afectan al estado del sistema. Esto puede parecer muy complicado y lo es, pero la electrónica moderna es capaz de gestionar instrucciones muy complejas sin equivocarse. Hay buenos motivos para esta complejidad. Ayuda a que el receptor no se quede fijado de manera accidental en alguna otra señal aleatoria que flote por ahí en ese momento, porque es muy improbable que una secuencia perdida reproduzca un patrón tan complejo. Cada emisor tiene asignado su propio código pseudoaleatorio particular, de modo que la propia complejidad garantiza que el receptor no confunde la señal de un satélite con la de otro. Para remate, todos los satélites pueden transmitir en la misma frecuencia sin producir interferencias con los demás, lo que deja más canales libres en el espectro de radio, cada vez más congestionado. Sobre todo, en las operaciones militares, el enemigo no tiene posibilidad alguna de interferir el sistema ni de enviar señales engañosas. Más en general, el Departamento de Defensa de Estados Unidos está a cargo del código pseudoaleatorio, de modo que controla el acceso al GPS.
*
Aparte del desajuste gradual de los relojes atómicos, hay otras fuentes de error temporal, tales como las órbitas, que son ligeramente diferentes en forma y tamaño de las pretendidas en primer lugar. La estación de seguimiento en tierra envía correcciones al satélite, que las transmite a los usuarios y asegura que todo está sincronizado con los relojes de referencia en el Observatorio Naval de Estados Unidos. Pero son los errores relativistas los que requieren mayor intervención matemática. De modo que en lugar de la física newtoniana de la vieja escuela se necesitan las teorías de la relatividad de Einstein.1
En 1905, Einstein publicó el artículo «Sobre la electrodinámica de cuerpos en movimiento». Examinaba la relación entre la mecánica de Newton y las ecuaciones de Maxwell para el electromagnetismo y encontraba que ambas teorías eran incompatibles. Un problema crucial es que la velocidad con la que se propagan las ondas electromagnéticas (la velocidad de la luz) no solo es constante en un sistema de referencia fijo, sino que también lo es y tiene el mismo valor en un sistema en movimiento. Si se enciende una linterna desde un coche en marcha, los fotones se desplazan a la misma velocidad que lo habrían hecho si el vehículo estuviese parado.
Por el contrario, en la física clásica, a la velocidad de la luz se habría sumado la del coche. Por lo tanto, Einstein proponía modificar las leyes del movimiento de Newton para garantizar que esa primera magnitud se conserva como una constante absoluta, lo que en particular implica que las ecuaciones del movimiento relativo deben modificarse. Por este motivo, la teoría se denominó «relatividad», lo que es un poco engañoso porque el aspecto principal es que la velocidad de la luz no es relativa. Einstein pasó muchos años intentando incorporar la gravedad a su esquema, algo que logró por fin en 1915. Estas dos teorías, relacionadas pero independientes, se conocen como la relatividad especial y general respectivamente.
Este no es un libro de texto sobre relatividad, de modo que solo voy a revisar por encima algunas características destacadas para tener una visión muy general de lo que esta implica. No hay espacio aquí para entrar en matices filosóficos, e incluso aunque lo hubiera sería una digresión, así que ruego que se me excuse si simplifico demasiado.
En la relatividad especial se modifican las ecuaciones del movimiento para asegurar que la velocidad de la luz tiene el mismo valor en cualquier sistema de referencia que se mueva sin aceleración. Esto se logra mediante las transformaciones de Lorenz, fórmulas matemáticas que llevan el nombre del físico holandés Hendrik Lorenz y que describen cómo cambian la posición y el tiempo cuando se comparan diferentes sistemas de referencia. Las predicciones más destacadas son muy extrañas desde un punto de vista newtoniano. Nada puede viajar más rápido que la luz; la longitud de un objeto se reduce conforme su velocidad aumenta y se aproxima a la de la luz, hasta hacerse arbitrariamente pequeña cerca de este valor; mientras esto ocurre, el tiempo subjetivo se ralentiza hasta casi detenerse y la masa aumenta sin límite. Grosso modo, a la velocidad de la luz, la longitud de un objeto en la dirección del desplazamiento se reduce a cero, se detiene el tiempo y la masa se hace infinita.
La relatividad general mantiene estos elementos, pero además incorpora la gravedad. No obstante, en lugar de considerarla como una fuerza, tal y como la modeló Newton, la entiende como un efecto de la curvatura del espacio-tiempo, una construcción matemática de cuatro dimensiones que combina las tres del espacio con una temporal. Cerca de cualquier masa, como una estrella, el espacio-tiempo se curva y forma una especie de depresión, pero en cuatro dimensiones. Un rayo de luz o una partícula que pase cerca se desvía de una trayectoria recta conforme sigue la curvatura. Esto produce la ilusión de una fuerza de atracción entre la estrella y la partícula.
Ambas teorías se han verificado hasta la saciedad mediante experimentos de gran sensibilidad. A pesar de sus características más bien extrañas, aportan el mejor modelo de la realidad que la física ha descubierto hasta la fecha. Las matemáticas del GPS deben tener en cuenta los efectos relativistas, resultantes tanto de la velocidad del satélite como de la gravedad de la Tierra. De otro modo, el sistema sería inútil. De hecho, su éxito con estas correcciones es una prueba palpable de la validez tanto de la relatividad especial como de la general.
La mayoría de los usuarios de GPS se encuentran, o bien en ubicaciones fijas en la superficie de la Tierra, o bien se mueven con lentitud (digamos que a una velocidad no superior a la de un coche rápido). Por este motivo, los diseñadores decidieron emitir información acerca de las órbitas del satélite mediante el empleo de un sistema de referencia unido de manera rígida a una Tierra que gira y asumir que su velocidad de rotación es constante. La forma de nuestro planeta, denominada un geoide, se aproxima a un elipsoide de revolución ligeramente aplastado.
Cuando se está en el coche y los satélites dan vueltas sobre el vehículo, es evidente que se mueven con relación a este. La relatividad especial predice que se observará que los relojes en órbita se atrasan respecto a uno de referencia en tierra. De hecho, los que están en movimiento pierden unos siete microsegundos al día, debido a la dilatación relativista del tiempo. Además, la fuerza de gravedad aparente a esa altura es menor que al nivel del suelo. Por lo que se refiere a la relatividad general, el espacio-tiempo cerca de los satélites es más plano (menos curvo) que el que hay en la vecindad del coche. Este efecto hace que los relojes en órbita se adelanten respecto a uno en tierra. La relatividad general predice que el valor de esta diferencia será de unos 45 microsegundos diarios. Al combinar estos efectos opuestos, un reloj en un satélite se adelantará respecto a uno en tierra cerca de 45 – 7 = 38 microsegundos al día. Un error así puede percibirse después de 2 minutos y la ubicación se desplazaría respecto a la correcta cerca de 10 kilómetros diarios. Después de un día, el navegador nos situaría en la ciudad equivocada, tras una semana en la provincia errónea y al pasar un mes, en el país incorrecto.
En un primer momento, los ingenieros y científicos que trabajaban en el proyecto del GPS no tenían la certeza de que la relatividad fuese a importar en realidad. Para los estándares humanos, los satélites van muy rápido, pero a paso de tortuga si se les compara con la velocidad de la luz. La gravedad terrestre es minúscula al nivel cósmico. Pero hicieron lo que pudieron para estimar las magnitudes de estos efectos. En 1977, cuando se colocó en órbita el primer prototipo de reloj atómico de cesio, todavía no estaban seguros de la importancia que iban a tener estos efectos o de si iban a ser positivos o negativos. Algunos ni siquiera creían que fuesen necesarias correcciones relativistas en absoluto. De modo que los ingenieros incorporaron un circuito en el reloj que al recibir desde tierra una señal dada podía cambiar su frecuencia para cancelar los efectos relativistas previstos, en caso de que fuese necesario. Durante las primeras tres semanas mantuvieron el circuito apagado y midieron la frecuencia del reloj. Observaron que se adelantaba 442,5 partes por billón, en comparación con otro en tierra. La predicción de la relatividad general era de 446,5 partes por billón. Casi perfecto.
*
Hay muchos otros usos del GPS aparte del evidente de ubicar posiciones (coches, vehículos comerciales, montañeros) y de las aplicaciones militares que llevaron a su creación en primer lugar. Mencionaré unas pocas.
No hace falta saber dónde se está cuando se usa una aplicación para llamar a la grúa porque el coche se ha roto, el GPS lo hace en nuestro lugar. También se emplea para impedir robos de vehículos, para confeccionar mapas y medir terrenos, para vigilar mascotas y cuidar de parientes mayores o para garantizar la seguridad de las obras de arte. Algunos de sus usos principales incluyen la navegación marítima y aérea y el seguimiento de flotas para empresas de transporte. Ahora que la mayor parte de los teléfonos móviles cuentan con receptores de GPS, son capaces de etiquetar las fotografías con la ubicación en la que se han tomado, avisar de dónde se encuentra un dispositivo robado o perdido, y pedir un taxi. Es posible emplear el GPS en conjunto con servicios cartográficos en línea, como Google Maps, de modo que el mapa muestre al usuario de manera automática allí donde se encuentre. Los granjeros pueden manejar tractores sin conductor, los banqueros vigilar transacciones financieras y los viajeros encontrar su equipaje. Los científicos tienen la capacidad de seguir los movimientos de especies amenazadas y de controlar desastres medioambientales, tales como vertidos de crudo.
¿Cómo nos las apañábamos antes sin GPS? Es sorprendente la rapidez con la que unos cuantos bits de magia matemática, que hacen posible una tecnología transformadora (y muy cara), pueden cambiar nuestras vidas.