7
Papá, ¿puedes multiplicar tripletes?
¿Las olas del océano golpean con gentileza contra tu barco en ASC: Black Flag? Mates.
¿Esas balas que vuelan por encima de tu cabeza en Call of Duty: Ghosts? Mates.
¿Que Sonic es capaz de correr muy deprisa y Mario de saltar? Mates.
¿Derrapar en esa esquina en Need for Speed a 140 kilómetros por hora? Mates.
¿Bajar la ladera haciendo snowboard en SSX? Mates.
¿Ese cohete que despega en Kerbal Space Program? Mates.
Página web de Forbes,
«This is the Math behind Super Mario»
La aldea tiene un aire medieval, con cabañas de techo de paja, carretas de caballos en un camino de tierra, campos con cultivos y ovejas. La cinta delgada de un riachuelo fluye entre las edificaciones apiñadas y brilla dorado bajo el sol de poniente. Se ve la escena desde arriba, como si se contemplase desde una aeronave. La panorámica gira y se balancea, conforme el vehículo desciende y tuerce. Pero no se trata de ningún aeroplano: el cambio a un punto de vista en el suelo revela el perfil inconfundible de un dragón. Que se acerca. Vuelta a la perspectiva del ojo de la criatura, que ahora baja en un picado pronunciado y roza los tejados al pasar. Se ve una llamarada que se extiende al frente y la paja se incendia...
Podría ser una película o un videojuego. Ambos pueden ser casi indistinguibles en la actualidad. De cualquier modo, es un triunfo de las imágenes generadas por computadora o IGC.
¿Son matemáticas?
Sin duda.
Entonces, deben ser muy recientes.
No del todo. La aplicación es nueva y algunas de las matemáticas son a la vez nuevas y sofisticadas, pero la parte en la que estoy pensando tiene unos 175 años de antigüedad. Y es algo que nunca se tuvo la intención de emplear para hacer imágenes por ordenador: No había ninguno en esa época.
Sí que estaba pensada para abordar un problema más general, independiente de cualquier hardware: la geometría en el espacio tridimensional. Desde una perspectiva actual, el potencial para relacionarla con las imágenes por computadora es evidente. Pero no tenía el aspecto de geometría. Parecía álgebra. Excepto por el hecho de que violaba una de las reglas básicas del álgebra, de modo que ni siquiera era eso. La trajo a la vida el prodigio irlandés de las matemáticas, sir William Rowan Hamilton, que bautizó a su criatura como cuaternión. Resulta irónico que esto no fuera lo que buscaba en realidad y hay un buen motivo para ello.
Lo que buscaba no existe.
*
Hoy en día, hay en el planeta más ordenadores que personas. La población de seres humanos está por encima de los 7.600 millones. Solo portátiles, hay más de 2.000 millones. Y hay casi 9.000 millones de teléfonos inteligentes y tabletas, que tienen a menudo más capacidad de cálculo que el mejor superordenador que se podía encontrar en el mercado en la década de 1980.1 Si se consideran los minúsculos procesadores que los fabricantes se apresuran a meter con calzador en cualquier lavavajillas, tostadora, nevera, lavadora y gatera del planeta, el número de ordenadores supera al de humanos cuatro a uno.
Es difícil darse cuenta de que no fue siempre así. El ritmo de las innovaciones ha sido frenético. Los primeros ordenadores domésticos (Apple II, TRS-80, Commodore PET) llegaron al mercado en 1977, hace apenas algo más de 40 años. Casi desde el principio, uno de sus usos principales fue jugar. Los gráficos eran rudimentarios y los juegos muy sencillos. Algunos consistían solo en mensajes de texto: «Estás en una mazmorra de pasadizos enrevesados, todos diferentes». Al que seguía una frase todavía más siniestra: «Estás en una mazmorra de pasadizos enrevesados, todos iguales».
Conforme los procesadores se hacían más rápidos, las memorias se volvían casi infinitas y los precios se desplomaban, las imágenes generadas por computadora eran cada vez más convincentes, hasta el punto en que empezaron a dominar la industria cinematográfica. El primer largometraje animado producido por completo por ordenador fue Toy Story en 1995, aunque ejemplos más breves se remontan a una década antes. Los efectos especiales se han vuelto ahora muy realistas y su uso es tan generalizado que apenas se nota que están ahí. Cuando Peter Jackson rodó la trilogía de El señor de los anillos no se preocupó por la iluminación. Esta se arreglaba después, en la posproducción por ordenador.
Los gráficos de alta calidad y movimiento rápido son tan habituales que apenas nadie se pregunta de dónde sale todo esto. ¿Cuándo apareció el primer videojuego? Treinta años antes que los ordenadores domésticos. En 1947, los pioneros de la televisión Thomas Goldsmith Jr. y Estle Ray Mann registraron una patente de un «aparato de diversión con tubo de rayos catódicos». Un tubo de rayos catódicos es una botella de vidrio corta y gruesa que tiene una base amplia que se curva con suavidad (la pantalla) y un cuello estrecho. Un dispositivo en el cuello dispara electrones sobre la pantalla y unos electroimanes controlan la dirección de este haz, que barre la pantalla en una serie de pasadas horizontales, como un ojo humano que lee una página de texto. Allí donde las partículas cargadas golpean la parte frontal del tubo, producen una fluorescencia en un revestimiento especial que crea un punto brillante de luz. La mayoría de los aparatos de televisión empleaban este sistema, hasta que aparecieron los televisores de pantalla plana en el mercado, en torno a 1997. El juego de Goldsmith y Mann se inspiraba en las pantallas de radar de la segunda guerra mundial. El punto de luz representaba un misil y el jugador intentaba que alcanzase los objetivos, que estaban dibujados en papel y pegados a la pantalla.
Para 1952, la unidad central EDSAC había conquistado las vertiginosas cumbres del tres en raya. El gran éxito de ventas fue Pong, un videojuego para máquinas recreativas fabricado por Atari que era una versión bidimensional y simplificada del tenis de mesa, con una bola que rebotaba en dos palas, una para cada jugador. Para los estándares actuales, los gráficos eran muy básicos: dos rectángulos que se podían desplazar para las palas y un cuadrado móvil para la bola. Casi no había acción, pero hasta que se pudo disponer de tecnología más avanzada, Pong fue la vanguardia de los videojuegos.
No hace falta insistir en que Hamilton no podía albergar la intención de que su criatura matemática se emplease de este modo. Esa idea tardó otros 142 años en dar fruto. Pero es fácil ver a posteriori que esta posibilidad era inherente al tipo de problema que su descubrimiento pretendía resolver. Hay matemáticas de muchos estilos. Quienes se dedican a ellas pueden ser resolutivos, determinados a dar respuesta a una cuestión concreta, sea en el mundo real o en el mental de las matemáticas puras. Pueden ser teóricos, organizadores de incontables teoremas especiales en el seno de un marco unificado. Pueden ser inconformistas, vagabundos errantes de un campo al otro, que trabajan en lo que les llama la atención. O pueden ser fabricantes de herramientas y crear nuevos instrumentos que resulten útiles cuando se abordan cuestiones que todavía no se han planteado: un método en busca de una aplicación.
Buena parte de la reputación de Hamilton descansa en su trabajo como teórico, aunque los cuaterniones son un ejemplo de su pericia como fabricante de herramientas. Los inventó para proporcionar una estructura algebraica a los cálculos sistemáticos acerca de la geometría del espacio tridimensional.
*
Hamilton nació en Dublín, Irlanda, en 1805 y era el cuarto de nueve hijos. Su madre fue Sarah Hutton y su padre era Archibald Hamilton, un abogado. Cuando William tenía tres años le enviaron a vivir con su tío James, que dirigía una escuela. Demostró tener un talento precoz para los idiomas y parece que también fue autodidacta en buena medida en matemáticas. Esta fue la disciplina que estudió en el Trinity College de Dublín a partir de los 18 años y en la que obtuvo unas calificaciones estratosféricas. John Brinkley, obispo de Cloyne, afirmó que «este joven, no diré qué va a ser, sino que es, el matemático más destacado de su época». Estaba en lo cierto y en 1837, cuando todavía no se había licenciado, Hamilton obtuvo la cátedra Andrews de astronomía y fue nombrado astrónomo real de Irlanda. Pasó el resto de su vida profesional en el observatorio Dunsink, cerca de Dublín.
Sus contribuciones más célebres se produjeron en óptica y en dinámica, sobre todo por el descubrimiento de una relación notable entre estas dos ramas separadas de la física matemática. Hamilton las reformuló en términos de un concepto matemático común: la función principal. Hoy en día se denomina «hamiltoniano» y ha llevado a avances destacados en ambos campos. Más tarde, resultó que era justo lo que se necesitaba para la muy extraña teoría de la mecánica cuántica, cuando esta apenas había echado los dientes.
Ya se ha hablado de Hamilton brevemente en el capítulo anterior. En 1833 resolvió un dilema cuasi filosófico que tenía siglos de antigüedad y despojó a los números complejos de su halo de misterio, los expuso como impostores y dejó claro que su aparente novedad era el resultado de un ingenioso disfraz, mientras que su verdadera naturaleza era casi trivial. Un número complejo, dijo Hamilton, no es ni más ni menos que un par ordenado de cantidades reales, pertrechado con una lista concreta de reglas para sumar y multiplicar pares. También se ha dicho que esta solución del rompecabezas llegó demasiado tarde para impresionar a nadie y que cuando a Gauss se le había ocurrido la misma idea, ni siquiera se había tomado la molestia de publicarla. En cualquier caso, la forma de pensar de Hamilton en torno a los números complejos demostró ser de gran valor porque le llevó a la creación de los cuaterniones.
Por estos y otros adelantos matemáticos, se le nombró caballero en 1835. Los cuaterniones llegaron más tarde y cuando lo hicieron, pocas personas, aparte del mismo Hamilton y de unos cuantos discípulos, apreciaron su importancia. Creo que mientras estuvo vivo, la mayoría de los matemáticos y de los físicos veían su promoción entusiasta de la causa de los cuaterniones como una especie de obsesión. No del todo una chifladura, pero algo peligrosamente cercano. Se equivocaban. Su nueva invención desató una revolución y llevó las matemáticas a un territorio virgen e inexplorado. Puede entenderse por qué la mayoría no percibía su potencial, pero Hamilton sabía que tenía algo importante entre manos. Su territorio virgen ofrece todavía hoy nuevas y tentadoras ideas.
*
Algunas preguntas por las que se preocupan muy pocos jugadores o espectadores de cine son: ¿cómo funcionan los gráficos? ¿Cómo se crean estas ilusiones? ¿Qué las hace tan convincentes? Vale, no hace falta saberlo para pasarlo bien al jugar el videojuego o al ver la película. Pero el desarrollo histórico, las técnicas que tuvieron que inventarse para hacerlo posible y las empresas que se especializan en IGC y que desarrollan juegos, necesitan a muchas personas muy formadas que sepan cómo funcionan los diferentes trucos, en un detalle técnico considerable, y que tengan el dominio y la creatividad suficientes para inventar otros nuevos. No es un sector en el que se puedan quedar dormidos en los laureles.
Los principios geométricos básicos se conocen desde hace al menos 600 años. Durante el Renacimiento italiano, pintores destacados empezaron a comprender la geometría del dibujo en perspectiva. Estas técnicas permitieron a los artistas crear imágenes realistas de un mundo tridimensional sobre un lienzo de dos dimensiones. El ojo humano hace algo muy parecido, con la retina en el lugar de la tela. Es difícil dar una descripción completa, pero en pocas palabras, el pintor proyecta una escena real sobre un lienzo plano al trazar una recta desde cada punto de la escena hasta otro que representa el ojo del espectador y hace una marca en el lugar en el que esta línea corta la superficie. El fantástico grabado de Alberto Durero titulado Hombre dibujando un laúd es una representación muy gráfica de este procedimiento.
Esta descripción geométrica puede convertirse en una fórmula matemática sencilla que transforma las tres coordenadas de un punto en el espacio en las dos que tiene la imagen correspondiente sobre la tela. Para aplicarla solo hay que conocer las posiciones del lienzo y del ojo del espectador con relación a la escena. Por motivos prácticos no se aplica esta transformación, denominada una proyección, a todos los puntos del objeto, sino a suficientes para obtener una buena aproximación. Este aspecto es visible en el grabado, que muestra un conjunto de puntos con forma de laúd y no el perfil completo del mismo. Esta colección de puntos se puede «cubrir» después con detalles más pequeños, tales como la paja de un techo, las ondas en el riachuelo y, por supuesto, sus colores, mediante el empleo de técnicas en las que no voy a entrar porque necesitaría otro libro.
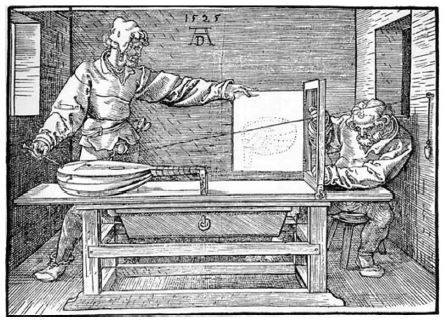
Hombre dibujando un laúd de Alberto Durero. Ilustra una proyección desde el espacio tridimensional a un lienzo de dos dimensiones.
Esto es lo que ocurre en esencia cuando se muestra la aldea desde el punto de vista del dragón. El ordenador ya tiene coordenadas representativas de todas las características importantes del poblado almacenadas en la memoria. La retina del dragón hace el papel del lienzo. Si se sabe dónde está la bestia y con qué ángulo mira, es posible emplear la fórmula para calcular lo que vería. Así se obtiene un fotograma de la película, que muestra la aldea en un instante concreto. En el siguiente plano, esta sigue en el mismo sitio, pero el dragón y su retina se han movido. Se determina a dónde han ido, se repite el cálculo y se obtiene otra imagen más. Si se sigue la trayectoria de la criatura por el cielo, es posible construir fotograma a fotograma la película de lo que ve.
Esta descripción no es literal, por supuesto, solo es la idea principal subyacente. Hay trucos especiales para hacer que los cálculos sean más eficaces y se ahorre tiempo de procesado en el ordenador. Por sencillez, se pasarán por alto.
El mismo tipo de cálculo es válido para las secuencias del dragón que llega, visto desde el suelo. Ahora se necesita otro conjunto de puntos para especificar dónde se halla en su vuelo y la pantalla sobre la que se proyecta todo está en el suelo y no en la bestia. Para ser más concretos, limitémonos al punto de vista del dragón. En este caso, el ojo está fijo y es la aldea la que parece moverse. Conforme la criatura se abalanza hacia el suelo, todo en el poblado parece hacerse más grande, inclinarse y girar a imitación de sus propios movimientos. Cuando se eleva hacia las nubes, la aldea se reduce. La perspectiva no puede dejar de ser convincente en ningún momento de la secuencia y la clave matemática para lograrlo es considerar la aldea como un objeto rígido (y bastante complejo). Para hacerse una idea de lo que esto implica se puede pretender ser el dragón, sostener algún objeto delante de los ojos y moverlo hacia delante y hacia atrás, y darle vueltas en un sentido y en otro.
Ahora todo se representa en el «sistema de referencia del dragón», que es fijo con relación a la criatura. La aldea se mueve como un cuerpo rígido, lo que en sentido matemático quiere decir que la distancia entre dos puntos cualesquiera no cambia. Sin embargo, el conjunto total puede desplazarse por el espacio. Hay dos tipos básicos de movimiento: de traslación y de rotación. En el primero, el cuerpo se desplaza en alguna dirección sin girar ni desviarse. En el segundo, rota en torno a una línea fija, el eje, y todos los puntos se desplazan el mismo ángulo en un plano que es perpendicular a esta recta. El eje puede ser cualquier línea en el espacio y el ángulo tener cualquier tamaño.
Todo movimiento rígido es una combinación de una traslación y de una rotación (aunque la primera puede ser de una distancia nula y la segunda podría ser de un ángulo nulo, en cuyo caso estas transformaciones no tendrían efecto alguno). En realidad, esto no es cierto del todo: otro movimiento rígido posible es la reflexión, que se comporta como un espejo. Pero no hay manera de obtener reflexiones mediante movimientos continuos, así que pueden pasarse por alto.
Ya se ha dado el paso principal para convertir dragones voladores en matemáticas. Lo que es necesario comprender es cómo cambian las coordenadas de un punto en el espacio cuando se aplica una traslación o una rotación. Una vez que se ha conseguido esto, es posible emplear la fórmula habitual para proyectar el resultado sobre una pantalla plana. Al final, las traslaciones son fáciles. La pesadilla son las rotaciones.
*
Todo es mucho más sencillo en dos dimensiones, en un plano. Euclides formalizó la geometría plana en torno al año 300 a. C. No obstante, no lo hizo mediante el empleo de movimientos rígidos. En su lugar, utilizó triángulos congruentes, que son aquellos de tamaño y forma idénticos, pero en posiciones diferentes. Al llegar el siglo XIX, los matemáticos habían aprendido a interpretar estos pares de triángulos como movimientos rígidos, transformaciones del plano que mueven el primero de ellos a la posición del segundo. Georg Bernhard Riemann definió la geometría en términos de tipos específicos de transformaciones.
Por una ruta muy diferente, los matemáticos también habían ideado maneras eficaces de calcular movimientos rígidos en el plano. Fue un inesperado efecto secundario de un nuevo desarrollo en el álgebra, que ya se ha visto en el capítulo anterior: los números complejos. Para trasladar (deslizar) una forma, tal como el CERDO ilustrado en la página 150, se suma una cantidad compleja fija a cada punto del conjunto. Para hacerla rotar un ángulo A, se multiplica cada uno de ellos por eiA. La guinda en el pastel es que los números complejos son ideales para resolver las ecuaciones diferenciales de la física... pero solo en el espacio bidimensional.
Todo eso llevó a Hamilton a concebir una idea que se convirtió en una obsesión. Dado que los complejos son tan eficaces en la física en dos dimensiones, debería haber unos números «supercomplejos» análogos que hicieran lo mismo en tres dimensiones. Si fuese capaz de encontrar un nuevo sistema de elementos como esos, se abrirían de par en par las puertas a toda la física de lo existente. Incluso era evidente por dónde empezar. Dado que los números complejos son pares de cantidades reales, estos supercomplejos hipotéticos deberían ser tríos de cantidades reales. Una para cada dimensión. La fórmula para sumar estos tríos (o tripletes, como Hamilton los llamaba a menudo) era evidente: bastaba con sumar las componentes correspondientes. Ya están resueltas las traslaciones. Ahora todo lo que tenía que hacer era descubrir cómo multiplicarlos. Pero todo lo que intentaba fracasaba y para 1842 estaba tan obsesionado con este obstáculo que incluso sus hijos se dieron cuenta. Cada día le preguntaban: «Papá, ¿puedes multiplicar tripletes?». Y cada día, Hamilton sacudía la cabeza con amargura. Sumarlos o restarlos, sí, pero no multiplicarlos, de ninguna manera.
A menudo es difícil saber la fecha exacta en la que se ha producido un gran avance matemático porque hay una «prehistoria», larga y confusa, durante la cual los investigadores se fueron acercando poco a poco hacia el descubrimiento final. Pero en ocasiones se conocen el sitio y el momento exactos. En este caso, la fecha crucial fue el lunes 16 de octubre de 1843 y el lugar fue Dublín. Incluso puede hacerse una conjetura bastante acertada de la hora, porque Hamilton, que entonces era presidente de la Real Academia de Irlanda, paseaba con su esposa a lo largo de un sendero junto a un canal, de camino a una reunión del Consejo de la Academia. Mientras descansaba un momento en el puente de Brougham Bridge, cruzó su mente la solución al problema que le acongojaba desde hacía años y la grabó en la mampostería con su cortaplumas:
i2 = j2 = k2 = ijk = – 1
La inscripción se ha borrado desde entonces, pero cada año un grupo de científicos y matemáticos recorren el «paseo Hamilton» para mantener vivo el recuerdo.
Sin más explicaciones, no hay esperanza alguna de entender esta inscripción. Incluso con ellas, puede parecer un despropósito inútil a primera vista, pero eso ocurre a menudo con los grandes avances matemáticos. Se tarda en asimilarlos. Si el descubrimiento hubiesen sido los números complejos, Hamilton habría grabado una regla muy sencilla: i2 = – 1. Esta ecuación encierra la clave de todo el sistema de los complejos. Todo lo demás se sigue a partir de aquí si se insiste en que sigan siendo válidas las reglas habituales de la aritmética. Añádanse j y k, junto con i, y la fórmula de Hamilton define un sistema más extenso de números o, si se prefiere, de objetos parecidos a números. Los denominó cuaterniones porque tienen cuatro componentes, cada una de ellas una cantidad real convencional. Estos elementos integrantes son un real tradicional, un múltiplo real de un número denominado i, que se comporta de la misma manera que la unidad imaginaria habitual que lleva ese símbolo, y dos nuevas componentes: un múltiplo real de un número denominado j y un múltiplo real de un número denominado k. Un cuaternión típico es por lo tanto una combinación a + bi + cj + dk, en la que a, b, c y d son cuatro cantidades reales ordinarias. O, para eliminar cualquier misterio, un cuarteto (a, b, c, d) de números reales que obedece a un listado breve de reglas aritméticas.
Al día siguiente de su pequeño acto de vandalismo, Hamilton escribió a su amigo, el matemático John Graves: «Allí caí en la cuenta de que debemos admitir, en cierto sentido, una cuarta dimensión del espacio para poder calcular con tríos». En una carta a su padre, escribió: «Pareció cerrarse un circuito eléctrico y saltó una chispa». Tenía más razón de lo que entonces podía saber, porque hoy en día su descubrimiento desempeña un papel vital en miles de millones de circuitos eléctricos que producen trillones de pequeñas chispas. Se los conoce como PlayStation 4, Nintendo Switch y Xbox y se emplean para jugar videojuegos tales como Minecraft, Grand Theft Auto y Call of Duty.
Ahora se comprende por qué Hamilton tuvo tantos problemas al intentar multiplicar tríos. No puede hacerse. Había dado por sentado que debían cumplirse todas las reglas habituales del álgebra y, en particular, que se podría dividir por cualquier cantidad distinta de cero. Pero daba igual la fórmula que probase, no conseguía obedecer todas las condiciones necesarias. Más tarde, los especialistas en álgebra demostraron que este requisito es lógicamente contradictorio. Si se quieren cumplir todas las reglas, no es posible ir más allá de los números complejos. Se queda uno atrapado en las dos dimensiones. Si se juguetea con las fórmulas de Hamilton y se asume que se cumple la propiedad asociativa, enseguida se descubre que él ya había descartado una de estas reglas, la propiedad conmutativa de la multiplicación. Por ejemplo, sus fórmulas implican que ij = k, mientras que ji = – k.
Hamilton tuvo la intuición de abandonar esta condición pese a que era problemático, como poco. Sin embargo, ahora se sabe que ni siquiera así es posible construir un sistema numérico autocontenido de tríos. Un hermoso teorema de Adolf Hurwitz, publicado de manera póstuma en 1923, afirma que los números reales, los complejos y los cuaterniones son las «únicas álgebras de división normadas». Es decir, el truco solo funciona con una, dos o cuatro componentes reales, pero no con tres. De estos, solo los reales y los complejos obedecen la propiedad conmutativa. Si se debilita la propiedad asociativa también puede obtenerse un sistema de ocho componentes, denominados octoniones o números de Cayley. La siguiente cantidad natural de componentes sería 16, pero ahora falla incluso la forma débil de la asociatividad. Eso es todo. No hay otra posibilidad en ese sentido. Es una de esas curiosidades extrañas que a veces tienen las matemáticas: en este contexto, el siguiente elemento de la secuencia 1, 2, 4, 8... no existe.
De modo que el pobre sir William pasó años de infructuoso esfuerzo en busca de un logro imposible. Al final, su avance se basó en el abandono de dos principios fundamentales: que la multiplicación debería ser conmutativa y que el sistema numérico «correcto» para la física tridimensional debería tener tres componentes. Merece un profundo reconocimiento por darse cuenta de que para progresar tenía que abandonar ambos.
*
El nombre que dio Hamilton a su nuevo sistema, cuaterniones, es un reflejo de su relación con las cuatro dimensiones. Promovió su empleo en muchas ramas de las matemáticas y de la física y demostró que un tipo especial de cuaternión, la «parte vectorial» bi + cj + dk, es capaz de representar el espacio tridimensional de una forma elegante. No obstante, se pasaron de moda cuando apareció un sistema más sencillo, el álgebra vectorial. Retuvieron su interés en las matemáticas puras y en la física teórica, pero no estuvieron a la altura de las expectativas que se había formado su creador respecto a sus usos prácticos. Eso fue así, claro, hasta que aparecieron los videojuegos y las IGC en la industria cinematográfica.
La relación con los cuaterniones surge porque los objetos de IGC tienen que rotar en el espacio tridimensional. El mejor método para conseguirlo se basa en los cuaterniones de Hamilton. Estos proporcionan una herramienta algebraica sencilla para calcular los efectos de las rotaciones con rapidez y precisión. Hamilton estaría sorprendido porque las películas no existían en su época. Las matemáticas antiguas pueden adquirir usos radicalmente nuevos.
La propuesta de emplear cuaterniones en los gráficos por ordenador aparece en un artículo de 1985 de Ken Shoemake, «Animating rotation with quaternion curves».2 El texto empieza con la afirmación de que «los cuerpos sólidos giran y ruedan a través del espacio. En las animaciones por ordenador, también lo hacen las cámaras. La mejor manera de describir las rotaciones de estos objetos es emplear un sistema de cuatro coordenadas, los cuaterniones». Shoemake prosigue con la afirmación de que estos tienen la ventaja principal de permitir «intermediaciones» sin saltos; es decir, la interpolación de imágenes entre dos puntos finales dados.
Antes de entrar en detalle, merece la pena considerar unas pocas características de la animación por ordenador que motivan este enfoque. Así se hace mucho más sencillo este análisis y también se emplean muchas otras técnicas. Una película o una imagen animada en una pantalla es en realidad una serie de planos fijos mostrados en rápida sucesión para crear la ilusión del movimiento. En la época temprana de la animación (piense en los dibujos de Walt Disney) los artistas dibujaban cada una de estas imágenes fijas como una obra de arte individual. Crear movimientos realistas (tanto como lo puede ser un ratón que habla) requería una gran habilidad. Podían emplearse varios trucos para simplificar el proceso, tales como tener un único fondo que permanecía igual a lo largo de una secuencia y superponer los objetos que cambiaban.
Este método es muy laborioso y poco práctico para batallas trepidantes en el espacio o para cualquier otra animación de alta calidad. Piénsese en alguien que tiene que animar una escena de una película o de un videojuego en la que interactúan varias naves espaciales. Un artista gráfico ha diseñado (en un ordenador) cada una de ellas por anticipado. Han quedado representadas por conjuntos fijos de puntos en el espacio, unidos entre sí para formar una red de triángulos minúsculos. A su vez, estos pueden representarse mediante listados adecuados de números: las coordenadas de los puntos y la información de cuál está conectado con cuál. Un programa informático es capaz de «renderizar» este conjunto de números (y otros datos, tales como el color) para crear una imagen bidimensional de la nave. Esta muestra el aspecto que va a tener cuando se sitúe en alguna posición de referencia y se vea desde alguna ubicación concreta.
Para hacer que la nave se mueva, el animador cambia esas cantidades de una manera adecuada. Por ejemplo, para llevarla a una nueva ubicación se añade un trío fijo de números (el vector de desplazamiento) a todos los puntos, mientras que las uniones entre estos siguen como antes. Después se renderiza este nuevo listado para obtener la siguiente imagen fija, etcétera. Sumar un vector es sencillo y rápido, pero los objetos también pueden rotar en el espacio. Son capaces de girar en torno a cualquier eje y es posible que este cambie conforme se desplaza el objeto. Las rotaciones también cambian los listados de números, pero de maneras más complicadas.
Muy a menudo, el animador sabe dónde empieza el movimiento (digamos que en el suelo) y a dónde tiene que llegar (en línea recta, de cara a una luna distante). Es fundamental que la posición sea precisa en la pantalla bidimensional, porque eso es lo que ve el espectador. Debe tener una apariencia artística o emocionante adecuada. De modo que estas dos ubicaciones, principio y fin, están representadas por dos listados de números calculados con cuidado. Si el movimiento preciso entre los puntos es menos crucial, es posible dar instrucciones al ordenador para que haga interpolaciones entre los extremos. Es decir, se combinan los dos listados mediante una regla matemática que representa la transición de uno a otro. Por ejemplo, promediar cada pareja de coordenadas correspondientes proporciona un objeto a medio camino entre el principio y el final. No obstante, eso es demasiado burdo para ser aceptable. Es habitual que distorsione la forma de la nave.
El truco es emplear movimientos rígidos en el espacio para hacer la interpolación. Podría empezarse por trasladar la nave al punto medio y rotarla 45º. Si se hace esto de nuevo, estará en la ubicación final adecuada y habrá girado 90º. Para una ilusión de desplazamiento continuo, puede trasladarse 1/90 parte de la diferencia en posiciones y rotar 1º cada vez de manera repetida. En la práctica se emplean pasos mucho más pequeños.
De un modo más abstracto, podemos pensar este procedimiento en términos del «espacio de configuración» de todos los movimientos rígidos. Cada elemento de este espacio corresponde a un movimiento rígido único y los puntos cercanos representan movimientos parecidos. De modo que una secuencia de movimientos, cada uno próximo al anterior, corresponde a una secuencia de puntos, cada uno cercano al anterior. Unir estos entre sí en orden produce una trayectoria poligonal en el espacio de configuración. Si los pasos se hacen muy pequeños, se obtiene una trayectoria continua. Así que ahora el problema de intermediar desde una imagen inicial a otra final se ha reformulado como el de encontrar una trayectoria a través del espacio de configuración. Si se quiere que las transiciones no sean abruptas, esta debería ser suave, sin curvas cerradas. Hay buenos métodos para hacer que un polígono sea más suave.
Este espacio de configuración tiene seis «dimensiones» (es decir, coordenadas necesarias para definir un punto en él). Hay tres para las traslaciones: una para cada una de las direcciones norte-sur, este-oeste y arriba-abajo. Después, se necesitan dos más para definir la posición de un eje de rotación y una última para el ángulo de la rotación. De modo que lo que empezó como un problema sobre el movimiento sin saltos de un objeto en tres dimensiones, se ha convertido en el de mover un punto a lo largo de una trayectoria suave en seis dimensiones. Este problema de la animación reformulado puede abordarse con el empleo de técnicas de la geometría multidimensional para diseñar trayectorias adecuadas.
*
En las matemáticas aplicadas, la manera tradicional de tratar las rotaciones de un objeto rígido se remonta a Euler. En 1752, demostró que todo movimiento rígido que no refleja el objeto es, o bien una traslación o bien una rotación en torno a algún eje.3 No obstante, para los cálculos él combinaba tres giros en torno a tres ejes en la representación de coordenadas habitual del espacio, un método que ahora se denomina ángulos de Euler. Como ejemplo, Shoemake consideraba la orientación de una aeronave, que en aeronáutica viene especificada por tres ángulos:
- Guiñada, en torno a un eje vertical, que da la dirección de la aeronave en un plano horizontal.
- Cabeceo, rotación en torno a un eje horizontal que atraviesa las alas.
- Alabeo, rotación en torno a la recta que va del morro a la cola.
El primer problema con este tipo de representación es que el orden en el que se aplican las componentes es vital. Las rotaciones no son conmutativas. El segundo es que la elección de los ejes no es única y que diferentes campos de aplicación emplean opciones diferentes. Un tercero es que las fórmulas para combinar dos rotaciones sucesivas, expresadas en ángulos de Euler, es complicada en extremo. Estas características no causan demasiados problemas en aplicaciones aeronáuticas básicas, que tratan en buena medida de las fuerzas que actúan sobre la aeronave cuando está en una orientación dada, pero resultan incómodas para la animación por ordenador, en la que los objetos experimentan secuencias completas de movimientos.
Shoemake afirmaba que los cuaterniones, aunque eran menos directos, proporcionaban una forma de especificar las rotaciones que es mucho más conveniente para los animadores, sobre todo en lo que se refiere a la intermediación. Un cuaternión a + bi + cj + dk se divide en una parte escalar a y en otra vectorial v = bi + cj + dk. Para rotar un vector v en un cuaternión q, se multiplica v por q – 1 a la izquierda y por q a la derecha para obtener q – 1vq. Sea lo que sea q, el resultado es de nuevo un vector con una parte escalar nula. Cabe destacar que las reglas de Hamilton para multiplicar cuaterniones demuestran que cualquier rotación corresponde a uno solo de estos elementos. La parte escalar es el coseno de la mitad del ángulo en que gira el objeto y la parte vectorial apunta a lo largo del eje de rotación y tiene una longitud equivalente al seno de la mitad de ese ángulo. De modo que el cuaternión encierra con acierto toda la geometría de la rotación, con el pequeño inconveniente de que las fórmulas naturales funcionan con la mitad del ángulo, no con el ángulo de manera directa.4
Los cuaterniones evitan las distorsiones que pueden acumularse si se rota un objeto muchas veces, como debe hacerse a menudo. Los ordenadores son capaces de realizar cálculos exactos con números naturales, pero es imposible representar los reales con precisión absoluta, de modo que se acumulan pequeños errores. Con los métodos habituales para representar transformaciones, el objeto que se manipula cambia de forma ligeramente, algo que no escapa a la vista. Por el contrario, si se toma un cuaternión y se cambian los números un poco, el resultado no deja de ser un cuaternión ni de representar un giro porque cada uno de ellos corresponde a alguna rotación. Tan solo que es un poco diferente de la exacta. La vista es menos sensible a estos errores y pueden compensarse con facilidad si se hacen demasiado grandes.
*
Los cuaterniones son una forma de crear movimientos realistas en tres dimensiones, pero lo que he descrito hasta el momento sirve para objetos rígidos. Tal vez naves espaciales, pero no dragones. Estos son flexibles. De modo que, ¿cómo se hace un dragón realista en IGC? Hay un método común que es válido no solo para dragones, sino casi para cualquier cosa y lo explicaré para el caso de un dinosaurio porque tengo imágenes adecuadas. Este enfoque reduce el movimiento de un objeto flexible al de un conjunto de objetos rígidos unidos. Se emplea el método que se quiera para estos últimos, con ajustes adicionales para unirlos entre sí de manera correcta. En particular, si se utilizan cuaterniones para rotarlos y trasladarlos, los mismos métodos pueden adaptarse para que funcionen con un dinosaurio flexible.

Izquierda: Tyrannosaurus rex tosco en malla de polígonos. Derecha: malla unida a un esqueleto rudimentario.
El primer paso es crear un modelo digital tridimensional del dinosaurio, en el que su superficie es una complicada malla de polígonos planos: triángulos, rectángulos y cuadriláteros menos regulares. El software empleado para esta tarea muestra la forma de manera geométrica y es posible moverla, rotarla, ampliar los detalles, etcétera y cada movimiento se muestra en la pantalla del ordenador. No obstante, lo que manipula el programa no es la geometría en sí misma, sino un listado de coordenadas numéricas de los puntos en los que se unen los polígonos. De hecho, las matemáticas que emplea el software para ayudar a dibujar el dinosaurio son casi las mismas que se usan para animar el resultado. La principal diferencia es que en esta etapa el animal está fijo y es el punto de vista el que se rota y se traslada. En la animación, el punto de vista puede estar fijo mientras se mueve el dinosaurio o cambiar también, como en el caso del dragón que desciende.
Ya se ha conseguido un dinosaurio tosco y rígido. ¿Cómo se hace para que se mueva? No es necesario hacer como los artistas en los días de Mickey Mouse: volver a dibujar la imagen con el personaje en una posición un poco diferente y repetirlo cientos de veces. Es deseable que el ordenador haga todo el trabajo repetitivo. De modo que el dinosaurio se reduce a un esqueleto rudimentario, un pequeño número de varillas rígidas («huesos») conectadas en sus extremos que se hacen pasar a través del cuerpo, los miembros, la cola y la cabeza. No es un diseño correcto en sentido anatómico, sino una estructura que permite doblar las partes principales del animal. También se representa este esqueleto como un listado de coordenadas de los dos extremos de cada hueso.
Una manera muy eficaz de conseguir animaciones realistas, en especial de personas o de criaturas humanoides, es la captura de movimiento. Un actor realiza los movimientos requeridos delante de una cámara o de varias para obtener datos en tres dimensiones. Se pegan puntos blancos a partes importantes de su cuerpo, tales como pies, rodillas, caderas y codos y el ordenador analiza un vídeo del actor para extraer la forma en que se mueven los puntos. Los datos de estos últimos se emplean para animar el esqueleto. Así es como se hizo la animación de Gollum en la trilogía de El señor de los anillos. Por supuesto, si se quieren movimientos impropios de humanos (pero realistas), el actor tiene que moverse de forma convenientemente extraña.
Sea como sea que se anima el esqueleto, una vez que el resultado es satisfactorio hay que «cubrirlo» con la malla. Es decir, se combinan los dos listados de coordenadas y se especifican las uniones adicionales entre las posiciones de los huesos y de las porciones de malla que los rodean. Después, durante una buena parte del proceso, se deja de lado la cobertura y se anima el esqueleto. Es aquí donde sale rentable el trabajo que ya se ha hecho con los movimientos rígidos, porque cada hueso es rígido y el fin es moverlo en tres dimensiones. También se deben imponer límites al movimiento, de modo que el esqueleto permanezca unido. Si se mueve un hueso, también deben hacerlo algunos extremos de los otros que están unidos a él, así que se desplazan las coordenadas de esos puntos a las posiciones adecuadas. Después se mueven también esos huesos de forma rígida, lo que por supuesto afecta a los que están unidos a estos... y un elemento tras otro se consigue que todo el esqueleto se doble un poco. Puede hacerse que mueva los pies para que camine, que agite la cola arriba y abajo o a los lados, que abra sus feroces mandíbulas... pero todo en el esqueleto. Esto es más sencillo, rápido y económico porque este armazón tiene muchas menos piezas.
Cuando se está satisfecho de que los huesos se muevan como se desea, puede resultar útil volver a cubrirlos con la malla, empezando por el primer fotograma de la secuencia. Entonces el software de animación hace que la cobertura siga el movimiento del esqueleto a lo largo de planos sucesivos sin que haya que hacer más trabajo, aparte de un clic o dos del ratón. Al hacerlo así, es posible comprobar que la animación no deja de parecer realista cuando el dinosaurio sigue a su esqueleto.
Ahora puede uno ponerse creativo. Desplazar la posición de la «cámara», el punto de vista empleado por el software, ampliar para obtener un primer plano, ver al dinosaurio que corre en la distancia... lo que sea. Es posible dar forma a otras criaturas, como una manada de herbívoros que huyen del monstruoso tiranosaurio. Una vez más, esto se hace en un primer momento con esqueletos que luego se cubren con mallas. Cada criatura puede animarse por separado y luego se juntan todas para crear una escena de caza.
Dado que los esqueletos no son más que monigotes de rayas, tal vez no se haya hecho nada hasta este momento para impedir que dos animales ocupen el mismo espacio. Hay más apaños de software que avisan de cualquier choque de este tipo. Cuando se cubren las estructuras con las mallas, los polígonos que se hallan al frente se solapan con los de atrás y, dado que los dinosaurios no son transparentes, hay que eliminar cualquier región que debiera estar oculta. Todo esto se hace mediante cálculos sencillos en geometría de coordenadas, aunque son muchos. No fue algo factible hasta que los ordenadores se volvieron rápidos de verdad. Hoy en día es rutinario.
Todavía hay más trabajo que hacer, porque un dinosaurio con la apariencia de un montón de polígonos no resulta muy impresionante que digamos. Hay que cubrir la malla con patrones de piel realistas, después resolver la información del color y tal vez crear texturas creíbles (el pelaje tiene un aspecto muy diferente a las escamas). Cada paso requiere un software diferente que aplica técnicas matemáticas distintas. Este paso se denomina renderización y monta la imagen final que aparece en la pantalla cuando se ve la película. Pero por debajo de todo ello hay miles de millones de cálculos que mueven puntos y aristas de manera rígida.
Además, estos métodos matemáticos tienen otra ventaja. Es posible decidir en cualquier etapa que hay algo que no es correcto y cambiarlo. Si se quiere un dinosaurio verde en lugar de uno marrón, no hay que dibujarlo todo de nuevo. Se emplea el mismo esqueleto y la misma malla, los mismos movimientos y la misma textura de la piel, pero se cambia el color.
Cuando se anima una película o un videojuego, hay equipos de expertos que emplean un conjunto de paquetes de software estándar que la industria ha desarrollado para llevar a cabo estos procesos. Para dar una idea de la complejidad de estas actividades, echaré un vistazo a algunas de las empresas y suites de programas que se emplearon para hacer la película Avatar.
La mayor parte de la animación la hizo la empresa Weta Digital en Nueva Zelanda, conocida por su trabajo en El señor de los anillos y El hobbit. Industrial Light & Magic, fundada por George Lucas en 1975 para los efectos especiales de la primera película de La guerra de las galaxias, creó 180 secuencias de este tipo, sobre todo la aeronave en la batalla final. El resto, en Reino Unido, Canadá y Estados Unidos, añadió detalles especiales imprescindibles, tales como pantallas en salas de control y mensajes de alerta en visores, para simular la tecnología del futuro. El programa Autodesk Maya se encargó de la mayoría de estas escenas y se empleó Luxology Modo para diseñar modelos, en particular el Escorpión. Con Houdini se crearon los planos de la Puerta del Infierno y los interiores. Las criaturas extraterrestres se diseñaron con ZBrush. Autodesk Smoke realizó la corrección de color, Massive simuló la vegetación alienígena y Mudbox se encargó de las montañas flotantes. El arte conceptual inicial y las texturas se crearon con Adobe Photoshop. En conjunto, participaron una docena de empresas y emplearon 22 herramientas de software diferentes, además de innumerables complementos desarrollados de manera específica.
*
En la actualidad, se añaden unas matemáticas muy sofisticadas al cóctel de la animación de IGC. El propósito, siempre, es hacer el trabajo de los animadores tan sencillo como sea posible, obtener resultados realistas y reducir el coste y el tiempo. Hay que tenerlo todo, ahora y por poco dinero.
Supongamos, por ejemplo, que el estudio cinematográfico tiene una librería con animaciones de un dinosaurio que realiza varias secuencias de movimiento. En una, galopa hacia delante y recorre un «ciclo de marcha», una porción de un movimiento que se repite de forma periódica. En otra, salta en el aire y se cae. Se quiere crear una escena en la que corre tras un pequeño herbívoro y se abalanza sobre él. Una manera eficaz de empezar sería combinar entre sí una docena de ciclos de marcha para el galope y luego añadir el salto al final. Por supuesto, después se apañaría todo para que no fuese evidente que se repite la misma animación doce veces, pero este es un buen comienzo.
Tiene sentido combinar las secuencias entre sí al nivel del esqueleto. Todo lo demás, como cubrir con mallas y añadir colores y texturas, puede hacerse después. Se dan los pasos obvios: se unen doce copias del ciclo de marcha a una secuencia de un salto y se mira a ver cómo queda.
Fatal.
Las partes están bien por separado, pero no se ajustan de manera continua. El resultado va a saltos y es poco convincente.
Hasta hace poco, el único recurso hubiese sido modificar las uniones a mano y, tal vez, interpolar algunas partes adicionales al movimiento. Incluso así, habría sido complicado. Pero algunos desarrollos recientes en las técnicas matemáticas prometen resolver este problema de un modo mucho mejor. La idea es emplear métodos de alisado para rellenar los huecos y eliminar las transiciones abruptas. El paso principal es encontrar una buena manera de hacerlo para un solo hueso del esqueleto o, de modo más general, para una única curva. Una vez que se ha resuelto ese problema, es posible combinar toda la estructura a partir de los componentes individuales.
La rama de las matemáticas que se ensaya en la actualidad se denomina teoría de formas. De modo que empecemos por la pregunta obvia: ¿qué es una forma?
En geometría ordinaria es posible encontrar muchas formas habituales: triángulo, cuadrado, paralelogramo o circunferencia. Cuando estas se interpretan en geometría de coordenadas, se convierten en ecuaciones. Por ejemplo, en el plano, los puntos (x, y) en una circunferencia unidad son precisamente los que cumplen la ecuación x2 + y2 = 1. Otra manera muy conveniente de representar esta figura es emplear lo que se llama un parámetro. Es una variable auxiliar, digamos t, que puede interpretarse como el tiempo, junto con fórmulas que describen el modo en que x e y dependen de t. Si este recorre algún intervalo numérico, cada valor de t arroja dos coordenadas x(t) e y(t). Cuando las fórmulas son correctas, estos puntos definen la circunferencia.
Las expresiones paramétricas habituales para un círculo son trigonométricas:
x(t) = cos t, y(t) = sen t
No obstante, también es posible cambiar la manera en que aparece el parámetro en las fórmulas sin dejar de obtener una circunferencia. Por ejemplo, si se pasa de t a t3, entonces
x(t) = cos t3, y(t) = sen t3
también determina una circunferencia, que es la misma. Este efecto se produce porque el parámetro tiempo aporta más información que solo el modo en que varían x e y. En la primera expresión, el punto se mueve a velocidad constante conforme varía t. En la segunda no.
La teoría de formas es una manera de sortear esta falta de unicidad. Una forma es una curva, considerada como un objeto que no depende de fórmula paramétrica alguna en particular. De modo que dos curvas paramétricas definen la misma forma si puede cambiarse el parámetro y convertir una fórmula en la otra, como pasar de t a t3. A lo largo del siglo pasado, los matemáticos han ideado un método estándar para conseguir este tipo de cosas. Es poco probable que se le haya ocurrido a alguien más porque requiere un punto de vista más bien abstracto.
El primer paso es considerar, no solo una curva paramétrica, sino el «espacio» de todas las posibles. Entonces se dice que dos «puntos» en este espacio (es decir, dos curvas paramétricas) son equivalentes si puede pasarse de una a otra mediante un cambio de parámetro. Después se define una «forma» como toda una clase de equivalencia de curvas, el conjunto de todas las que son equivalentes a una dada.
Es una versión más general del truco que se emplea para hacer aritmética en un módulo. Por ejemplo, en los enteros módulo 5, el «espacio» son todos los enteros y dos de ellos son equivalentes si su diferencia es un múltiplo de 5. Hay cinco clases de equivalencia:
Todos los múltiplos de 5.
Todos los múltiplos de 5 a los que se suma 1.
Todos los múltiplos de 5 a los que se suma 2.
Todos los múltiplos de 5 a los que se suma 3.
Todos los múltiplos de 5 a los que se suma 4.
¿Por qué no seguir? Porque un múltiplo de 5 al que se suma 5 no es más que otro múltiplo de 5 un poco mayor.
En este caso, el conjunto de clases de equivalencia, que se denota por  5, tiene mucha estructura útil. De hecho, en el capítulo 5 se mostró como buena parte de la teoría de números básica depende de esta estructura. Se dice que 5 es el «espacio cociente» de los enteros módulo 5. Es lo que se obtiene cuando se pretende que los números que difieren en cinco unidades son idénticos.
5, tiene mucha estructura útil. De hecho, en el capítulo 5 se mostró como buena parte de la teoría de números básica depende de esta estructura. Se dice que 5 es el «espacio cociente» de los enteros módulo 5. Es lo que se obtiene cuando se pretende que los números que difieren en cinco unidades son idénticos.
Algo parecido ocurre para obtener el espacio de formas. En lugar de enteros, está el espacio de todas las curvas paramétricas. En lugar de cambiar números por múltiplos de 5, se cambia la fórmula paramétrica. De modo que se acaba con un «espacio cociente» formado todos los cambios de las curvas paramétricas módulo en el parámetro. Es probable que eso parezca carente de sentido, pero es un truco habitual cuyo valor se ha puesto en evidencia a lo largo de mucho tiempo. Un motivo por el que el espacio cociente es valioso, es porque supone la descripción natural de los objetos que interesan aquí. Otro es porque de manera habitual hereda una estructura interesante del espacio original.
Para el espacio de formas, el principal elemento de interés de la estructura es una medida de la distancia entre dos de ellas. Tómese una circunferencia y defórmese un poco: se obtiene una curva cerrada, que es parecida a la circunferencia pero que es diferente. Si se deforma mucho se obtiene una curva cerrada que es, de manera intuitiva, más diferente, «más alejada». Esta intuición puede precisarse y es posible demostrar que el espacio de formas tiene un concepto razonable y natural de distancia: una métrica.
Una vez que un espacio tiene una métrica se pueden hacer todo tipo de cosas útiles. En particular, discernir los cambios continuos de los discontinuos e incluso subir la apuesta para distinguir los suaves de los que no lo son. Y, al fin, se vuelve al problema de combinar las secuencias de animación entre sí. Como mínimo, esta métrica en el espacio de formas permite detectar discontinuidades o falta de suavidad en el ordenador, al resolver los cálculos, en vez de hacerlo a ojo. Pero hay más.
Las matemáticas tienen muchas técnicas de alisado que son capaces de transformar una función discontinua en otra continua, o una que no es suave en otra que sí lo es. Se ha descubierto que se pueden aplicar estos métodos al espacio de formas. De modo que el ordenador consigue modificar de manera automática una secuencia de movimientos combinada que presente un salto repentino para eliminar la discontinuidad con solo hacer los cálculos adecuados. No es fácil, pero puede hacerse y de manera lo bastante eficaz como para ahorrar costes. Solo calcular la distancia entre dos curvas emplea métodos de optimización parecidos a los que se vieron en el problema de la persona viajante. Alisar una secuencia implica resolver una ecuación diferencial bastante parecida a la de Fourier para el flujo de calor, que se verá en los capítulos 9 y 10. Ahora puede persuadirse a toda una sucesión animada de curvas para que «fluyan» hacia una sucesión animada diferente, lo que elimina las discontinuidades (algo parecido de nuevo a un flujo de calor que alisa una onda cuadrada).5
Otras formulaciones abstractas parecidas hacen posible también convertir animaciones en otras similares, pero diferentes. Una secuencia que muestra un dinosaurio que camina puede apañarse para hacer que el animal corra. No se trata solo de acelerar la acción, porque la manera en que corre un animal es diferente, a ojos vistas, a cómo anda. Esta metodología está aún en pañales, pero sugiere con firmeza que un poco de pensamiento matemático de alto nivel podría dar grandes dividendos en películas de animación futuras.
Estas son solo algunas de las maneras en que las matemáticas contribuyen a la animación. Otras crean versiones simplificadas de procesos físicos para imitar las olas en el océano, los remolinos de nieve, las nubes y las montañas. El objetivo es obtener resultados realistas al mismo tiempo que los cálculos se mantienen todo lo sencillos que sea posible. En la actualidad hay teorías matemáticas muy amplias acerca de la representación de caras de personas. En Rogue One, parte de la serie de La guerra de las galaxias, los actores Peter Cushing (que había fallecido en 1994) y Carrie Fisher (fallecida en 2016) fueron recreados de manera digital al cubrir las caras de unos dobles con las suyas. No era demasiado convincente y los seguidores protestaron con vehemencia. En Los últimos Jedi usaron un método mejor: se escogieron escenas descartadas de Fisher de películas anteriores, se unieron entre sí y se adaptó el guion para que sirviera. No obstante, aún se necesitaron muchas IGC para cambiar su vestuario, por consistencia. De hecho, casi todo, excepto su cara, se recreó de manera digital: su cabeza, su peinado, su cuerpo y sus ropas.6
Ya se emplean las mismas técnicas para crear vídeos ultrafalsos como propaganda política. Se graba a alguien haciendo comentarios racistas o machistas o cuando parece estar borracho. Después se cubre su cara con la del oponente y se lanza a las redes sociales. Incluso cuando se detecta la falsificación ya se ha ganado mucho, porque los rumores se extienden más rápido que la verdad. Las matemáticas y la tecnología que depende de ellas pueden emplearse para el bien tanto como para el mal. Lo que importa es cómo se usen.