Learning Objectives
After Chapter 1.2, you will be able to:
- Explain the importance of order when performing vector calculations
- Calculate a scalar or a vector as a product of two vectors, using the right-hand rule when applicable:
After Chapter 1.2, you will be able to:
Vectors are numbers that have magnitude and direction. Vector quantities include displacement, velocity, acceleration, and force. Scalars are numbers that have magnitude only and no direction. Scalar quantities include distance, speed, energy, pressure, and mass. The difference between a vector and scalar quantity can be quite pronounced when there is a nonlinear path involved. For example, in the course of a year, the Earth travels a distance of roughly 940 million kilometers. However, because this is a circular path, the displacement of the Earth in one year is zero kilometers. This difference between distance and displacement can be further illustrated with vector representations.
Vectors may be represented by arrows; the direction of the arrow indicates the direction
of the vector. The length of the arrow is usually proportional to the magnitude of
the vector quantity. Common notations for a vector quantity are either an arrow or
boldface. For example, the straight-line path from here to there might be represented by a vector identified as
 or A. The magnitude of the displacement between the two positions can be represented as
|
or A. The magnitude of the displacement between the two positions can be represented as
|
 |, |A|, or A. Scalar quantities are generally represented with italic type: the distance between
two points could be represented by d.
|, |A|, or A. Scalar quantities are generally represented with italic type: the distance between
two points could be represented by d.
In this book (and all books of the Kaplan MCAT Review series), we will consistently use boldface to represent a vector quantity and italic to represent the magnitude of a vector or a scalar quantity.
The sum or difference of two or more vectors is called the resultant of the vectors. One way to find the sum or resultant of two vectors A and B is to place the tail of B at the tip of A without changing either the length or the direction of either arrow. In this tip-to-tail method, the lengths of the arrows must be proportional to the magnitudes of the vectors. The vector sum A + B is the vector joining the tail of A to the tip of B and pointing toward the tip of B. Vector addition is demonstrated in Figure 1.2 below.
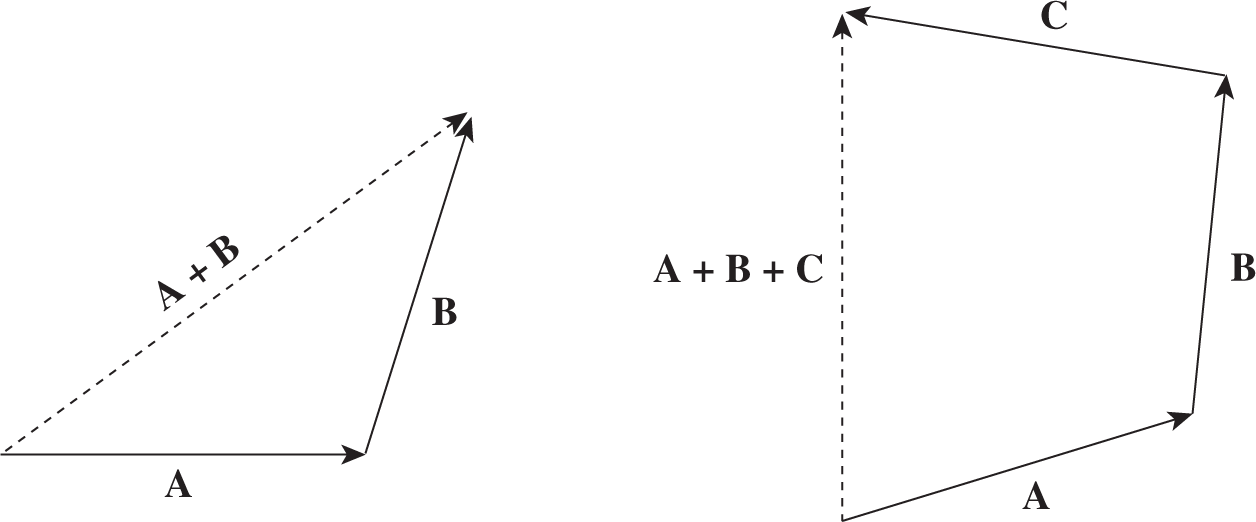
When adding vectors, always add tip-to-tail!
Another method for finding the resultant of several vectors involves breaking each vector into perpendicular components. In most cases, these components are horizontal and vertical (x- and y-components, respectively); however, in some instances—such as inclined planes—it may make more sense to define the components as parallel and perpendicular (|| and ⊥, respectively) to some other surface.
Given any vector V, we can find the x- and y-components (X and Y) by drawing a right triangle with V as the hypotenuse, as shown in Figure 1.3.
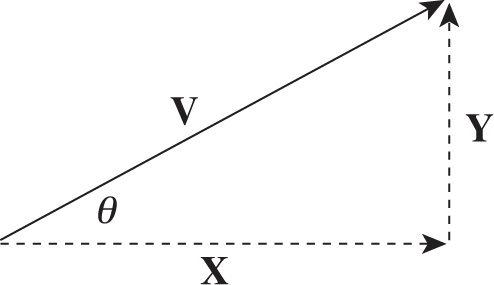
If θ is the angle between V and the x-component, then
 and
and
 . In other words:
. In other words:
Conversely, if we know X and Y, we can find V, as shown in Figure 1.4 below.
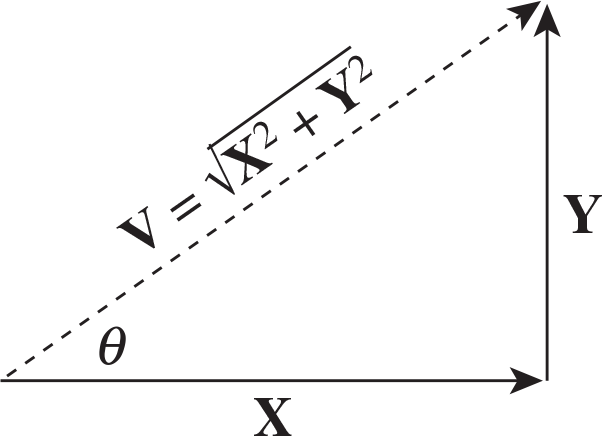
Calculating the magnitude of V requires use of the Pythagorean theorem:
The angle of the resultant vector can also be calculated by knowing inverse trigonometric functions, discussed in Chapter 10 of MCAT Physics and Math Review (Note: This inverse tangent calculation is beyond the scope of the MCAT):
The x-component of a resultant vector is simply the sum of the x-components of the vectors being added. Similarly, the y-component of a resultant vector is simply the sum of the y-components of the vectors being added. This is illustrated in Figure 1.5.
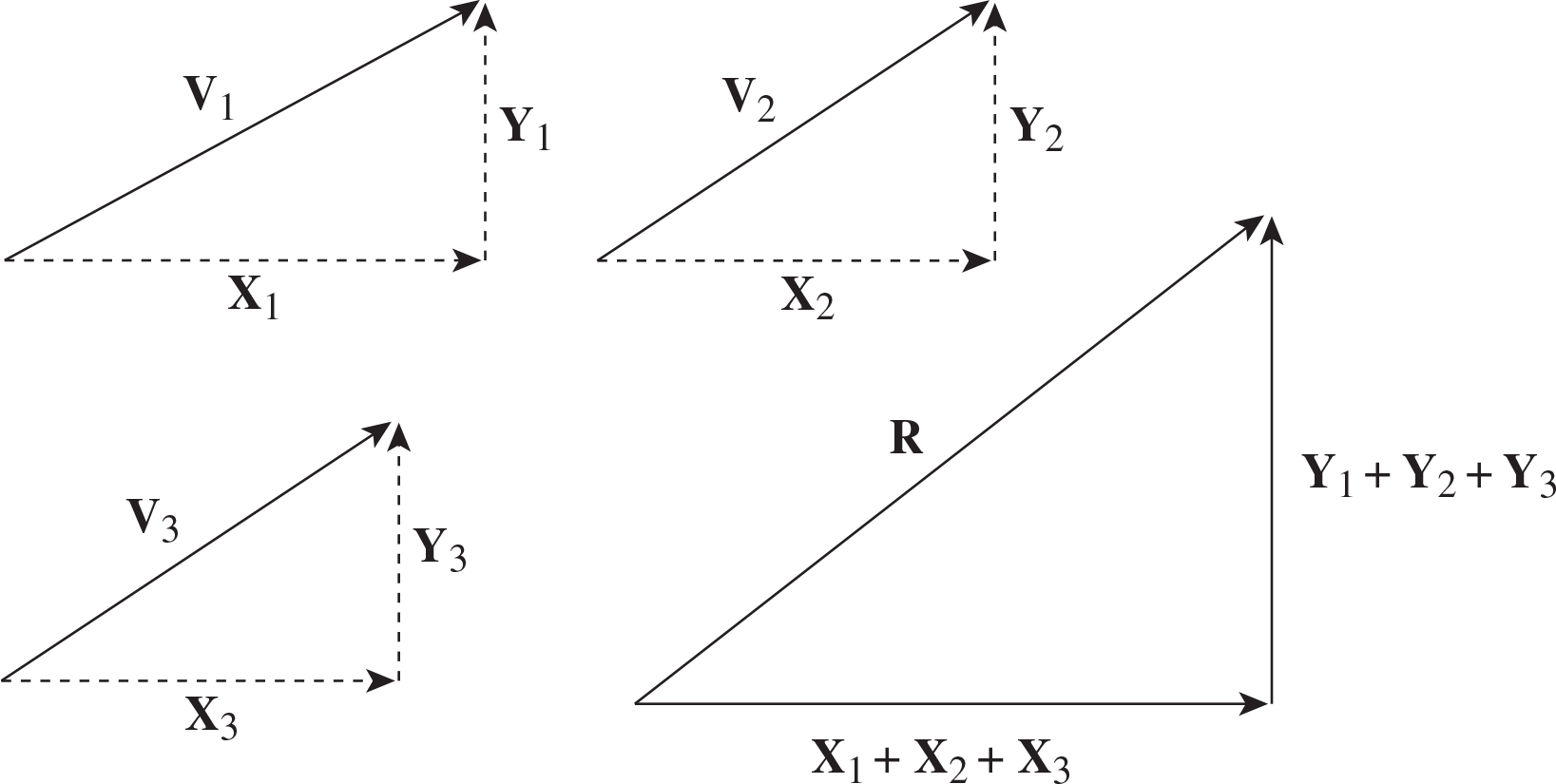
To find the resultant (R) using the components method, follow these steps:


Subtracting one vector from another can be accomplished by adding a vector with equal magnitude—but opposite direction—to the first vector. This can be expressed mathematically as A – B = A + (–B), where –B represents a vector with the same magnitude as B, but pointing in the opposite direction. Vector subtraction may also be performed on the component vectors first and then combined to create a final vector. As with vector addition, the x-component of the resultant vector is the difference of the x-components of the vectors being subtracted. Similarly, the y-component of the resultant vector is the difference of the y-components of the vectors being subtracted.
Notice that when you subtract vectors, you are simply flipping the direction of the vector being subtracted and then following the same rules as normal: adding tip-to-tail.
When a vector is multiplied by a scalar, its magnitude will change. Its direction will be either parallel or antiparallel to its original direction. If a vector A is multiplied by the scalar value n, a new vector, B, is created such that B = nA. To find the magnitude of the new vector, B, simply multiply the magnitude of A by |n|, the absolute value of n. To determine the direction of the vector B, we must look at the sign on n. If n is a positive number, then B and A are in the same direction. However, if n is a negative number, then B and A point in opposite directions. For example, if vector A is multiplied by the scalar +3, then the new vector B is three times as long as A, and points in the same direction. If vector A is multiplied by the scalar –3, then B would still be three times as long as A but would now point in the opposite direction.
In some circumstances, we want to be able to use two vector quantities to generate a third vector or a scalar by multiplication. To generate a scalar quantity like work, we multiply the magnitudes of the two vectors of interest (force and displacement) and the cosine of the angle between the two vectors. In vector calculus, this is called the dot product (A · B):
In contrast, when generating a third vector like torque, we need to determine both its magnitude and direction. To do so, we multiply the magnitudes of the two vectors of interest (force and lever arm) and the sine of the angle between the two vectors. Once we have the magnitude, we use the right-hand rule to determine its direction. In vector calculus, this is called the cross product (A × B):
The resultant of a cross product will always be perpendicular to the plane created by the two vectors. Because the MCAT is a two-dimensional test, this usually means that the vector of interest will be going into or out of the page (or screen).
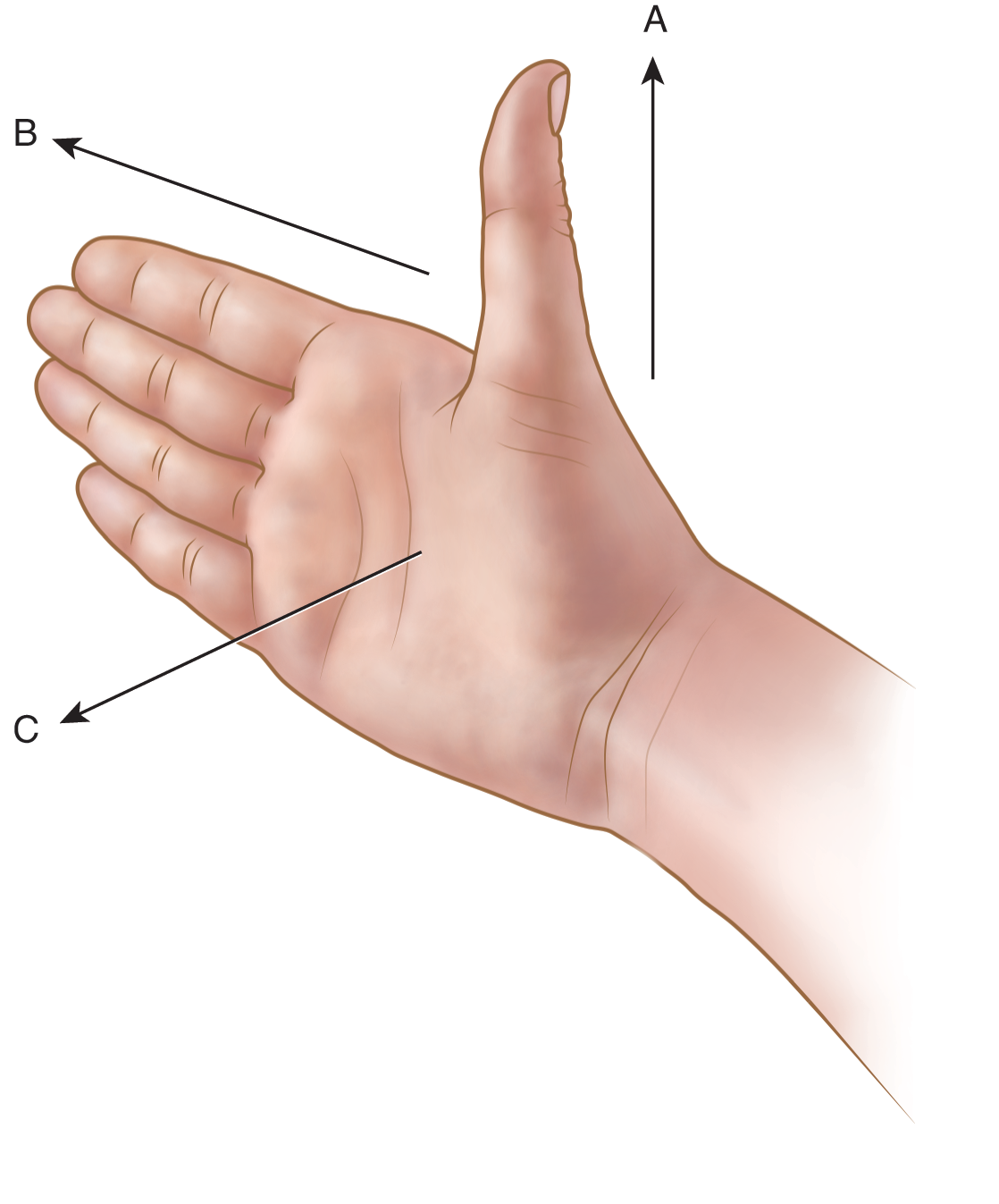
There are multiple versions of the right-hand rule that can be used to determine the direction of a cross product resultant vector. Figure 1.6 shows one method considering a resultant C where C = A × B:
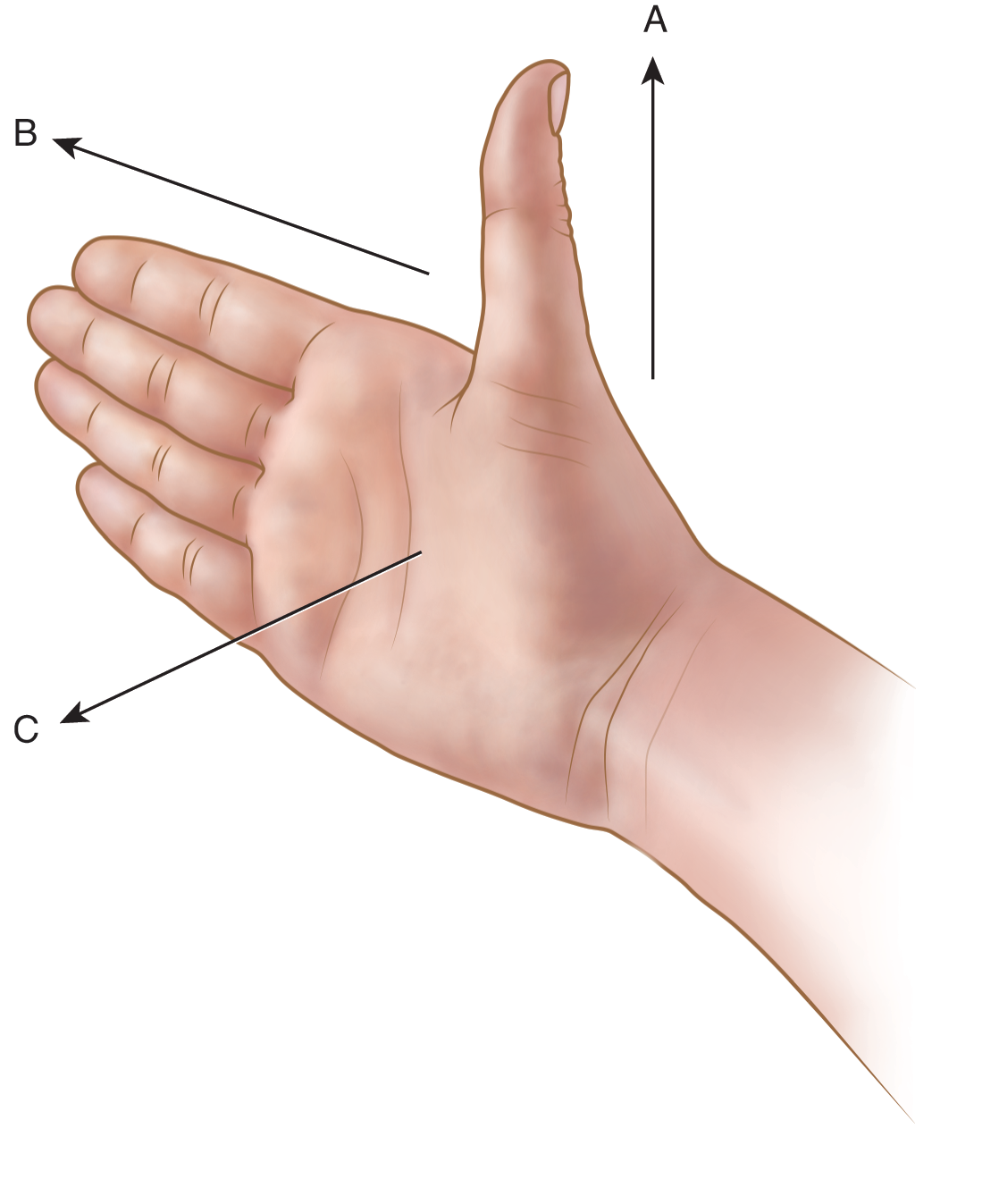
Note that you may have learned a version of the right-hand rule that is different from what is described here. For example, some students learn to point the right index finger in the direction of A and the right middle finger in the direction of B; when one holds the thumb perpendicular to these two fingers, it points in the direction of C. It makes no difference which version of the right-hand rule you use, as long as you are comfortable with it and are skilled in its proper use.
There are several different methods for determining the direction of a cross product resultant vector. Choose whichever method you prefer and stick with it—it’s more important to be skilled in using one method than to be only somewhat familiar with multiple methods.
For cross products and the right-hand rule, order matters! Unlike scalar multiplication, which is commutative (3 × 4 = 4 × 3), vector multiplication is not commutative (A × B ≠ B × A)!