Kapitel 4. Multithreading
Mehrkernprozessoren sind der Standard, wenn es um den Arbeitsplatzrechner, den heimischen PC oder den Laptop geht. Daher ist es von existenzieller Bedeutung für eine moderne Programmiersprache, auf die Anforderungen der modernen Rechnerarchitekturen adäquate Antworten zu geben – zumal funktionale Programmiersprachen wie Clojure (Clojure, 2011) oder auch Haskell (The Haskell Programming Language, 2011) die Messlatte bei der Unterstützung von Nebenläufigkeit sehr hoch gelegt haben. Sowohl Clojure als auch Haskell bieten Software Transactional Memory (STM) an.
Diese Abstraktion der Multithreading-Unterstützung erreicht C++11 noch nicht, aber es befindet sich auf dem richtigen Weg. Die neuen Features sind:
eine standardisierte Threading-Schnittstelle, unabhängig von Betriebssystem und Compiler,
ein definiertes Speichermodell und atomare Datentypen,
mehrere Techniken zum Schutz der Daten vor konkurrierendem Zugriff,
Bedingungsvariablen, um Threads durch Events zu synchronisieren,
Threads, die lokale Daten halten,
asynchrone Tasks in Form von Futures.
Die Darstellung des Speichermodells und der atomaren Datentypen wird erst in Teil III Thema sein, da diese neuen Features deutlich das Niveau einer ersten Tour durch C++11 überschreiten.
Threads
Der Header <thread> inkludiert, und die neue Funktion std::thread steht zur Verfügung, um einen Thread zu erzeugen und sofort zu starten.
Erzeugung von Threads
Ein Thread std::thread benötigt die Funktionalität, die in ihm ausgeführt werden soll. Dazu bieten sich drei Möglichkeiten an:
Funktionen
Funktionsobjekte
Lambda-Funktionen
Das Programm in Listing 4.1 stellt die drei Möglichkeiten dar.
createThread.cpp
01 #include <iostream>
02 #include <thread>
03
04 void helloFunction(){
05 std::cout << "Hello C++11 from function." << std::endl;
06 }
07
08 class HelloFunctionObject {
09 public:
10 void operator()() const {
11 std::cout << "Hello C++11 from a function object."
<< std::endl;
12 }
13 };
14
15
16 int main(){
17
18 std::cout << std::endl;
19
20 // thread executing helloFunction
21 std::thread t1(helloFunction);
22
23 // thread executing helloFunctionObject
24 HelloFunctionObject helloFunctionObject;
25 std::thread t2(helloFunctionObject);
26
27 // thread executing lambda function
28 std::thread t3([]
{std::cout << "Hello C++11 from lambda function."
<< std::endl;});
29
30 // ensure that t1, t2 and t3 have finished before main terminates
31 t1.join();
32 t2.join();
33 t3.join();
34
35 std::cout << std::endl;
36
37 }Sowohl der erste Thread t1 als auch der zweite Thread t2 in Listing 4.1 sollten relativ vertraut wirken. Anders verhält es sich mit dem letzten Thread t3 (Zeile 28), dessen Funktionalität direkt in der Lambda-Funktion angegeben ist. Da in diesem konkreten Fall die Lambda-Funktion keine Argumente erwartet, ist es nicht notwendig, die Klammerpaare für die Argumente anzugeben. Die Lambda-Funktion [](){ ... ;} lässt sich daher auf []{ ... ;} verkürzen. Threads, die nur ein paar Anweisungen ausführen müssen, sind ideale Kandidaten für Lambda-Funktionen, denn sie bieten entscheidende Vorteile:
Die Codefunktionalität wird direkt dort definiert, wo sie benötigt wird.
Keine unnötigen Funktionen oder Funktionsobjekte werden erzeugt.
join
Eine Funktion fehlt noch in der Erläuterung. In den Zeilen 31 bis 33 wird auf jedem Thread join aufgerufen. Dies bewirkt, dass der Vater-Thread auf die Beendigung der drei Threads wartet, sodass diese ihre Aufgabe vollständig ausführen können, bevor der Vater-Thread sich beendet.
detach
Durch detach wird das Gegenteil erreicht, denn diese Methode löst die Lebenszeit des neuen Threads vom Vater-Thread.
Das Ergebnis der Programmausführung ist, wie erwartet, nicht deterministisch.
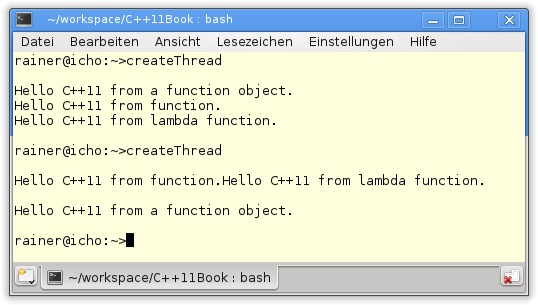
Zwei Dinge fallen auf:
Es ist nicht vorhersagbar, welcher Thread am schnellsten seinen Code ausführt. Im ersten Durchlauf war das Funktionsobjekt der schnellste, im zweiten die Lambda-Funktion.
Alle Threads schreiben nach
std::cout. Dies ist die gemeinsam genutzte Variable aller drei Threads. Das ist der Grund dafür, dass sich die Ausgabeoperationen der Funktion und des Funktionsobjekts überschneiden. Bevor die Funktion ihrstd::endlnachstd::coutschreiben kann, schreibt das Funktionsobjekt seine Ausgabe nachstd::cout. Das fehlendestd::endlwird daher zum Schluss des Programmlaufs ausgegeben.
Die korrekte Programmausführung setzt voraus, dass std::cout nur exklusiv von einem Thread verwendet werden kann. Die naheliegende Lösung ist Locking (dazu bald mehr im Abschnitt „Schutz der Daten“).
Argumentübergabe
Die Threads waren sehr einfach strukturiert. Nun sollen sie Argumente erhalten. Als Grundlage dient das Programm in Listing 4.1.
createThreadWithArguments.cpp
01 #include <iostream>
02 #include <string>
03 #include <thread>
04
05 void helloFunction(const std::string& s){
06 std::cout << s << std::endl;
07 }
08
09 class HelloFunctionObject{
10 public:
11 void operator()(const std::string& s) const {
12 std::cout << s << std::endl;
13 }
14 };
15
16
17 int main(){
18
19 std::cout << std::endl;
20
21 // thread executing helloFunction
22 std::thread t1(helloFunction,
"Hello C++11 from function.");
23
24 // thread executing helloFunctionObject
25 HelloFunctionObject helloFunctionObject;
26 std::thread t2(helloFunctionObject,
"Hello C++11 from function object.");
27
28 // thread executing lambda function
29 std::thread t3([](const std::string& s)
{std::cout << s << std::endl;},
"Hello C++11 from lambda function.");
30
31 // ensure that t1, t2 and t3 have finished before main
terminates
32 t1.join();
33 t2.join();
34 t3.join();
35
36 std::cout << std::endl;
37
38 }Die Ausgabe des Programmlaufs entspricht im Wesentlichen der von Abbildung 4.1. Das nicht deterministische Verhalten besteht weiter darin, welcher Thread als Erster zum Zuge kommt und ob sich die Ausgaben auf die Konsole überschneiden. Interessanter ist da schon die Übergabe der Parameter an die Funktion (Zeile 22), an das Funktionsobjekt (Zeile 26) und vor allem an die Lambda-Funktion (Zeile 29).
Gemeinsam von Threads genutzte Daten wie std::cout müssen geschützt werden. Dafür gibt es in C++11 Mutexe und Locks.
Schutz der Daten
Mutex
Mutex steht für den englischen Ausdruck mutual exclusion. Durch wechselseitigen Ausschluss stellt der Mutex sicher, dass nur ein Thread Zugriff auf einen gemeinsam genutzten kritischen Bereich besitzt. Dieser kritische Bereich kann aus einem Variablenzugriff oder auch aus mehreren Anweisungen bestehen, die es zu schützen gilt.
Will ein Thread in den kritischen Bereich eintreten, muss er den Mutex locken. Dies ist aber nur möglich, wenn dieser nicht gelockt ist. Erhält der Thread den Lock nicht, wird er geblockt.
mutex
Der Gebrauch ist denkbar einfach.
std::mutex m; // ... m.lock(); //critical region m.unlock();
Trotz dieser einfachen Nutzung sollte ein Mutex nicht direkt verwendet werden, denn er ist nur ein einfaches Werkzeug. Da ein Mutex in der Regel an mehreren Stellen im Sourcecode verwendet wird, ist die Gefahr sehr groß, dass er nicht mehr freigegeben wird. Das kann durch eine Nachlässigkeit oder durch eine Ausnahme passieren. Das Ergebnis ist das gleiche. Der Thread erhält den Mutex nicht mehr und bleibt geblockt.
Praxistipp
Erzeugen Sie einen künstlichen Bereich, um die Lebenszeit einer automatischen Variablen genau vorzugeben.
01 . . . 02 MyData myData; 03 . . . 04 myData.doSomething(); 05 . . . 06 doMore();
Wollen Sie explizit sicherstellen, dass eine automatische Variable wie MyData myData; in dem Codeschnipsel in Listing 4.3 vor Zeile 5 ihre Gültigkeit verliert und ihr Destruktor automatisch aufgerufen wird, führen Sie einen künstlichen Bereich wie in Listing 4.4 ein.
Aus diesem Grund werden Mutexe in C++11 in Locks gepackt. Diese funktionieren nach dem bekannten C++-RAII-Idiom. RAII steht dabei für Resource Acquisition Is Initialization. Wie das RAII-Idiom funktioniert, wird im Anhang C, erläutert.
lock_guard
std::lock_guard und std::unique_lock sind das Mittel der Wahl in C++11, wenn es darum geht, den Zugriff auf einen kritischen Bereich durch Threads zu synchronisieren. Beide halten eine Referenz auf einen Mutex. Dabei ist std::lock_guard für den einfachen Einsatz ausgelegt, denn es bindet den Mutex in seinem Konstruktor und gibt ihn im Destruktor wieder frei, gemäß RAII-Idiom. Damit lässt sich die Race Condition aus Listing 4.1, in dem die Threads unkoordiniert auf die Konsole schreiben, einfach lösen.
lockStdout.cpp
01 #include <iostream>
02 #include <mutex>
03 #include <string>
04 #include <thread>
05
06 std::mutex coutMutex;
07
08 void helloFunction(const std::string& s){
09
10 // acquire lock
11 std::lock_guard<std::mutex> guard(coutMutex);
12 std::cout << s << std::endl;
13
14 } // release lock automatically
15
16
17 class HelloFunctionObject{
18 public:
19 void operator()(const std::string& s) const {
20
21 // acquire lock
22 std::lock_guard<std::mutex> guard(coutMutex);
23 std::cout << s << std::endl;
24
25 } // release lock automatically
26 };
27
28
29 int main(){
30
31 std::cout << std::endl;
32
33 // thread executing helloFunction
34 std::thread t1(helloFunction,
"Hello C++11 from function.");
35
36 // thread executing HelloFunctionObject
37 HelloFunctionObject helloFunctionObject;
38 std::thread t2(helloFunctionObject,
"Hello C++11 from function object.");
39
40 // thread executing lambda function
41 std::thread t3([&]{std::lock_guard<std::mutex>
guard(coutMutex);
std::cout << "Hello C++11 from lambda function."
<< std::endl;});
42
43 // ensure that t1, t2 and t3 have finished before main terminates
44 t1.join();
45 t2.join();
46 t3.join();
47
48 std::cout << std::endl;
49
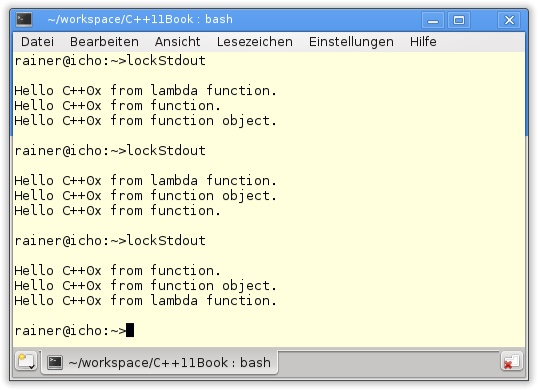
50 }Listing 4.5 wartet mit ein paar Neuheiten auf. So wird in Zeile 6 der coutMutex angelegt, der durch std::lock_guard sowohl von der Funktion (Zeile 11) als auch vom Funktionsobjekt (Zeile 22) und von der Lambda-Funktion (Zeile 41) verwendet wird. Diese Lambda-Funktion ist deutlich anspruchsvoller als alle bisher verwendeten anonymen Funktionen:
Die Freigabe des Mutex geschieht automatisch, sodass die drei Aufrufe von std::lock_guard für das koordinierte Schreiben nach std::cout sorgen.
unique_lock
Der std::lock_guard besitzt aber nur eine sehr eingeschränkte Funktionalität. Reicht dieses einfache Interface nicht aus, sollte der std::unique_lock verwendet werden. Vereinfacht gesagt, besitzt dieser nicht mehr die strenge 1:1-Beziehung zu seinem Mutex wie std::lock_guard. Dieser Aufbruch der engen Assoziation zwischen dem Mutex und seinem Lock besitzt mächtige Auswirkungen auf den std::unique_guard. So lassen sich mit ihm Deadlocks elegant verhindern oder zeitliche Bedingungen mit Locks verknüpfen. Die genaueren Details folgen in Teil III.
Oft ist es nicht nötig, eine Variable während ihres gesamten Lebenszyklus zu schützen, stattdessen muss nur ihre geschützte Initialisierung sichergestellt werden.
Sichere Initialisierung der Daten
Die einfachste Art, Daten geschützt zu initialisieren, sollte nicht vergessen werden, bevor die neuen C++11-Techniken folgen. Das Programm startet im Main-Thread. Daten, die in diesem initialisiert werden, solange noch kein Kind-Thread instanziiert wurde, werden zwangsläufig geschützt initialisiert.
C++11 kennt drei Arten, Variablen geschützt zu initialisieren. Dies sind:
Objekte, deren Konstruktor als konstante Ausdrücke (
constexpr) definiert wurden.Statische Variable mit Block-Gültigkeit.
std::call_oncewird über eine Funktion und ein Flagstd::once_flagparametrisiert; dabei stellt das Flag sicher, dass die Funktion nur einmal ausgeführt wird.
In Listing 4.6 sind alle drei Variationen der Initialisierung von Daten dargestellt.
threadingInitialization.cpp
01 #include <mutex>
02 #include <thread>
03
04 class MyClass{
05 int i;
06 public:
07
08 constexpr MyClass():i(0){}
09 MyClass(int i_):i(i_){}
10
11 };
12
13 void blockScope(){
14
15 // statically initialized
16 static MyClass myClass(1);
17
18 }
19
20 MyClass* myClass3=nullptr;
21
22 void createInstance(){
23
24 myClass3=new MyClass(2);
25
26 }
27
28
29 int main(){
30
31 // protected initialized, because of
32
33 // constexpr
34 MyClass myClass;
35
36 // block scope
37 blockScope();
38
39 // threading library functions
40 std::once_flag initFlag;
41 std::call_once(initFlag,createInstance);
42
43 }Durch constexpr (Zeile 8) wird der Standardkonstruktoraufruf (Zeile 34) zur Übersetzungszeit ausgeführt. myClass (Zeile 16) ist eine statische Variable mit Block-Gültigkeit. In diesem Fall stellt der C++11-Compiler sicher, dass die Funktion nur einmal und atomar ausgeführt wird. Aber auch zur Laufzeit lässt sich eine Variable geschützt initialisieren. Die Funktion createInstance (Zeile 22) initialisiert mithilfe des Flags initFlag die Variable myClass3 (Zeile 24) genau einmal.
Schutz von Daten ist aber nur notwendig, wenn diese von den Threads gemeinsam genutzt werden. Thread-lokale Daten verlangen keinen Schutz.
Thread-lokale Daten
Durch das Schlüsselwort thread_local wird eine Thread-lokale Variable definiert. Jeder Thread besitzt eine Kopie der Variablen, die an die Lebenszeit des Threads gebunden ist.
Oft reicht es aber nicht aus, dass Threads koordiniert werden, stattdessen ist es notwendig, dass sie synchronisiert auf gemeinsam genutzten Daten arbeiten. Ein Thread kann mit seiner Arbeit erst beginnen, wenn ihm ein anderer Thread das entsprechende Signal sendet.
Synchronisation von Threads
Für die Synchronisation von Threads sollen zwei Anforderungen erfüllt sein:
Die Zeit zwischen Arbeit aufnehmendem Thread (Arbeiter) und Signal sendendem Thread (Sender) soll möglichst kurz sein.
Das Warten des Arbeiters soll möglichst wenig CPU-Zeit verbrauchen.
Mit dem Lock std::unique_lock, der die zu bearbeitenden Daten schützt, der Methode std::this_thread::sleep_for, die einen Thread für eine angegebene Zeit schlafen legt, und der neuen Zeitmethode std::chrono::milliseconds stehen alle Bausteine bereit, um einen Thread zu implementieren, der durch einen anderen Thread aufgeweckt wird. Ein einfacher Wahrheitswert dient zur Synchronisation der Threads in Listing 4.7.
01 std::mutex mutex_;
02 bool dataReady;
03
04 void waitingForWork(){
05
06 std::unique_lock<std::mutex> lck(mutex_);
07
08 while(!dataReady){
09
10 lck.unlock();
11 std::this_thread::sleep_for(
std::chrono::milliseconds(50));
12 lck.lock(); // need the lock for the while test
13
14 }
15
16 doTheWork(); // require the lock
17
18 }Über den Wahrheitswert dataReady signalisiert der Sender, dass die Daten bereit sind. Bevor der Arbeiter den Wahrheitswert prüft und gegebenenfalls seine Arbeit in doTheWork (Zeile 16) aufnimmt, setzt er den Lock mit std::unique_lock (Zeile 6). Sind die Daten nicht bereit, löst er den Lock, legt sich für 50 Millisekunden schlafen und setzt den Lock wieder, um dataReady (Zeile 8) zu testen.
Die Funktion waitingForWork (Zeile 4) erfüllt die zwei Anforderungen aber nicht optimal. Zwischen dem Senden des Signals und dem Zeitpunkt, an dem der Worker seine Arbeit aufnimmt, vergehen im Mittel 25 ms (50 ms geteilt durch 2). Zwar lässt sich die Schlafphase einfach verkürzen, indem die Konstante verkleinert wird, dies geht aber auf Kosten der CPU, denn das Sperren und Entsperren des Lock benötigt CPU-Ressourcen.
Beide Bedingungen – kurzes Warten und geringe CPU-Auslastung – lassen sich mit den neuen Bedingungsvariablen in C++11 einfach erfüllen (Listing 4.8):
conditionVariable.cpp
01 #include <iostream>
02 #include <condition_variable>
03 #include <mutex>
04 #include <thread>
05
06 std::mutex mutex_;
07 std::condition_variable condVar;
08
09 bool dataReady;
10
11 void doTheWork(){
12 std::cout << "Processing shared data." << std::endl;
13 }
14
15 void waitingForWork(){
16
17 std::cout << "Worker: Waiting for work." << std::endl;
18
19 std::unique_lock<std::mutex> lck(mutex_);
20 condVar.wait(lck,[]{return dataReady;});
21 doTheWork();
22
23 std::cout << "Work done." << std::endl;
24
25 }
26
27 void setDataReady(){
28
29 std::cout << "Sender: Data is ready." << std::endl;
30
31 std::lock_guard<std::mutex> lck(mutex_);
32 dataReady=true;
33 condVar.notify_one();
34
35 }
36
37 int main(){
38
39 std::cout << std::endl;
40
41 std::thread t1(waitingForWork);
42 std::thread t2(setDataReady);
43
44 t1.join();
45 t2.join();
46
47 std::cout << std::endl;
48
49 }Thread t1 verwendet die Funktion setDataReady (Zeile 27), um dem Thread t2 zu signalisieren, dass die Daten bereit sind. Durch condVar.notify_one (Zeile 33) weckt er den Worker auf. condVar.wait(lck,[]{return dataReady;} (Zeile 20) sperrt den Lock, prüft mit der Lambda-Funktion, ob die Bedingung erfüllt ist, und arbeitet doTheWork (Zeile 21) ab.
Die Programmausgabe zeigt die Interaktion von Arbeiter und Sender.
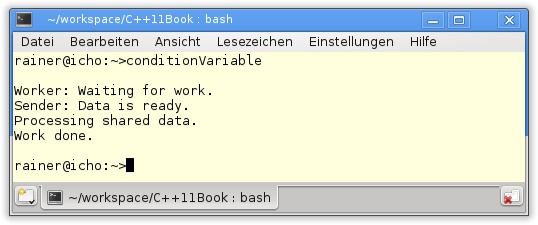
Neben notify_one kennt die Bedingungsvariable auch die Methode notify_all. Damit werden alle Threads, die gerade im Zustand wait sind, aufgeweckt.
Ob es die Basiswerkzeuge zum Erzeugen von Threads, zum Koordinieren von Threads wie Lock, zum Synchronisieren von Threads wie Bedingungsvariablen, Thread-lokale Daten oder auch atomare Datentypen waren – dies sind die einfachen Grundwerkzeuge, die jede Threading-Bibliothek mitbringen muss. Komfortabler wird der Umgang mit Threads aber erst, wenn nur die reine Funktionalität spezifiziert werden muss, die im Thread ausgeführt werden soll. Alle anderen Aspekte rund um das Thread-Handling werden vom System abgenommen. Letztendlich will der Anwender nur das Ergebnis der Tasks abfragen.
Genau diese High-Level-API bietet C++11 mit den asynchronen Tasks.
Asynchrone Aufgaben
Die asynchrone Funktionalität kam relativ spät in den neuen C++11-Standard. Eine asynchrone Aufgabe besteht aus zwei Komponenten:
Promise
Promise: Produziert das Ergebnis in der Regel in einem anderen Thread.
Future
Future: Fordert das Ergebnis des Promise an.
Das Programm in Listing 4.5 illustriert, wie viel Tipparbeit investiert werden muss, um drei Threads zu erzeugen, die Ausgaben der Threads nach std::cout zu koordinieren und letztendlich mittels join zu gewährleisten, dass die Threads ihre Aufgabe vollenden können. Da ein Thread keinen Wert zurückgeben kann, wurde std::cout als Ergebniskanal missbraucht. Soll das Programm darüber hinaus die Ergebnisse der Threads in einer definierten Reihenfolge schreiben, müssten wir noch Bedingungsvariablen anwenden. Damit wäre das Programm vollkommen serialisiert und vom Programmablauf einem Single-Threaded-Programm sehr ähnlich.
Ganz schön viel Aufwand. Das geht deutlich einfacher mit std::async zum Starten einer asynchronen Aufgabe (Listing 4.9).
asyncStdout.cpp
01 #include <future>
02 #include <iostream>
03 #include <string>
04
05 std::string helloFunction(const std::string& s){
06
07 return "Hello C++11 from " + s + ".";
08
09 }
10
11
12 class HelloFunctionObject{
13 public:
14 std::string operator()(const std::string& s) const {
15
16 return "Hello C++11 from " + s + ".";
17
18 }
19 };
20
21 int main(){
22
23 std::cout << std::endl;
24
25 // future with function
26 auto futureFunction= std::async(helloFunction,"function");
27
28 // future with function object
29 HelloFunctionObject helloFunctionObject;
30 auto futureFunctionObject=
std::async(helloFunctionObject,"function object");
31
32 // future with lambda function
33 auto futureLambda= std::async([](const std::string& s )
{return "Hello C++11 from " + s + ".";},
"lambda function");
34
35 std::cout << futureFunction.get() << "\n"
<< futureFunctionObject.get() << "\n"
<< futureLambda.get() << std::endl;
36
37 std::cout << std::endl;
38
39 }Der Aufruf std::async lässt sich sowohl über eine Funktion (Zeile 26) als auch über ein Funktionsobjekt (Zeile 29) und eine Lambda-Funktion (Zeile 33) parametrisieren. Der Rückgabewert des Aufrufs, der vom expliziten Typ std::future<std::string> ist, wird durch das Schlüsselwort auto an die entsprechende Variable gebunden. Mit dem Future lässt sich das Ergebnis des asynchronen Tasks durch den get-Aufruf (Zeile 35) abholen. Der get-Aufruf eines Future ist blockierend.
Die Ausgabe ist mittlerweile vertraut.
Noch ein paar Worte zu Futures und Promises, die Details folgen in Kapitel 18.
Future
Im Gegensatz zu std::future aus Listing 4.9 bietet std::shared_future an, dass das Ergebnis mehrmals angefordert werden kann.
Promise
Neben dem automatischen Starten eines Tasks mit std::async ist dies in C++11 auch explizit mit der Funktion std::thread möglich. Dazu wird in Listing 4.10 ein Promise definiert. Über die get_future-Methode des Promise wird ein Future erzeugt und mit dem Promise verbunden. Der neue Thread erhält die Funktion asyncFunc und als Parameter den transferierten Promise: std::move(int Promise). Das Ergebnis wird in gewohnter Weise durch den get-Aufruf des Future eingefordert.
std::promise<int> intPromise; std::future<int> intFuture = intPromise.get_future(); std::thread t(asyncFunc, std::move(intPromise)); int result = intFuture.get();
Die einzige Unbekannte in Listing 4.10 ist nur noch die Funktion asyncFunc.
void asyncFunc(std::promise<int>& intPromise){
int result;
try{
intPromise.set_value(result);
}
catch (MyException e) {
intPromise.set_exception(std::copy_exception(e));
}
}asyncFunc erhält als Argument den Promise. Über seine Methode set_value oder gegebenenfalls set_exception steht der Rückgabewert für den Future zu Verfügung.
Damit verlassen wir das Feld der neuen Multithreading-Funktionalität in C++11 und kommen zu all den Erweiterungen, die die Standardbibliothek mit sich bringt.