11
Putting It All Together
In this age of abused therapeutic use exemptions (TUEs), inappropriate use of prescription medications, illegal pre-race intravenous infusions, undetectable testosterone creams, EPO-induced red blood cell expansions, asthma medications prescribed for non-asthmatic runners, and thyroid hormones provided to athletes with trouble-free thyroids—all as part of an effort to artificially change a runner’s physiology and make him stronger and faster—it is nice to know that there is one thing in running that can never be faked: running form. “You can fool an athlete’s normal physiology with drugs and illegal performance-boosters, but you can never fake the physics of form,” notes Walt Reynolds, a strength and conditioning specialist who has worked on running form with some of the world’s best runners, including Cynthia Limo, Mary Wacera, and Monicah Ngige (1). There is no supplement or drug that will upgrade running form. Great form has to be learned and earned through the use of drills, form-specific exercises, and regular practice.
Optimal form will always be primarily determined by four key components of running gait: foot-strike pattern (FAT), reversal of swing (ROS, also known as “sweep”), shank angle at initial contact with the ground (SAT), and the ratio of reversal of swing to maximal shank angle (ROS/MSA). These four variables are the essentials, the form factors that determine whether a runner can reach her true potential and how likely she is to be injured. Most runners have these variables configured in sub-optimal ways, which results in a higher risk of injury and a decreased chance of reaching an optimal state of fitness and attaining the best possible personal records. This is true even when a runner seems to be running smoothly and her upper body mechanics appear flawless. When the four variables are combined in the right way, a runner can achieve her potential with the lowest possible risk of injury, even when the upper body is moving around with Zatopek-like jerks and shudders. This chapter will show you how to put together the four key components of form in the best way.
Foot-Strike Pattern
Even though about 95 percent of distance runners are heel-strikers (2, 3), it has become clear that a midfoot-strike pattern is superior to heel-striking. This is true from the standpoints of both performance and the likelihood of injury: Midfoot-strikers are simply faster and less likely to get hurt.
Looking at the matter from a performance standpoint, it is important to note that the fastest runners in the world—elite and super-elite sprinters—are forefoot-strikers, not heel-strikers. No world-class sprinter has ever been a heel-striker. In addition, the quickest distance runners in the world—the elite Kenyans and Ethiopians—are forefoot- and midfoot-strikers.
Why is this true? Why don’t we see a mix of heel-, midfoot-, and forefoot-striking among the world’s best runners? Until now, the explanation for this phenomenon has not been entirely clear. But thanks to recent research carried out at Southern Methodist University and Harvard University, we now know that the chain of events that occurs during the stance phase of gait (when propulsive forces are produced) is completely different when comparing heel-striking to midfoot-striking. Specifically, heel-striking places negative limits on force production, while midfoot-striking sets the stage for the optimal amount and timing of propulsive forces (4).
Traditionally the stance phase of gait, when all vertical and horizontal propulsive forces are actually produced, has been simplistically divided into three parts: initial contact with the ground, mid-stance (support), and toe-off. With this simplistic view of stance, it seemed to make little difference whether a runner initially hit the ground with the heel or with the middle of the foot.
Heel-Striking
However, the stance scenario is actually much more complex. If a runner is a heel-striker, the overall gait cycle proceeds in this order:
- The still point of the foot, also known as the zero point, is reached. Still point is the moment when the foot, ankle, and lower part of the leg reach the farthest point forward during the swing phase of gait. The still point precedes ground contact and is the point at which MSA is measured.
- After still point is reached, the foot moves downward and backward toward the ground and makes initial impact heel-first, usually on the lateral aspect of the heel with a typically large SAT.
- As seen on the all-important graph illustrating ground-reaction force as a function of time during stance, a force equal to one times body weight is reached very quickly (figure 11.1).
- On the graph illustrating force as a function of time during stance, a force equal to 1.5 times body weight is also reached extremely quickly when heel-striking is the preferred initial ground-contact option.
- The first peak in vertical force is finally reached during stance (after Steps 3 and 4), followed by a small “trough” which represents a slight reduction in force.
- After the first peak in force is reached, the shank finally assumes a vertical position, at a 90-degree angle with the ground. Up until this time, the shank has been inclined forward, relative to the body.
- As the body moves forward over the foot, a second, higher peak in vertical propulsive force is attained.
- Take-off from the ground finally occurs, and the runner is airborne.
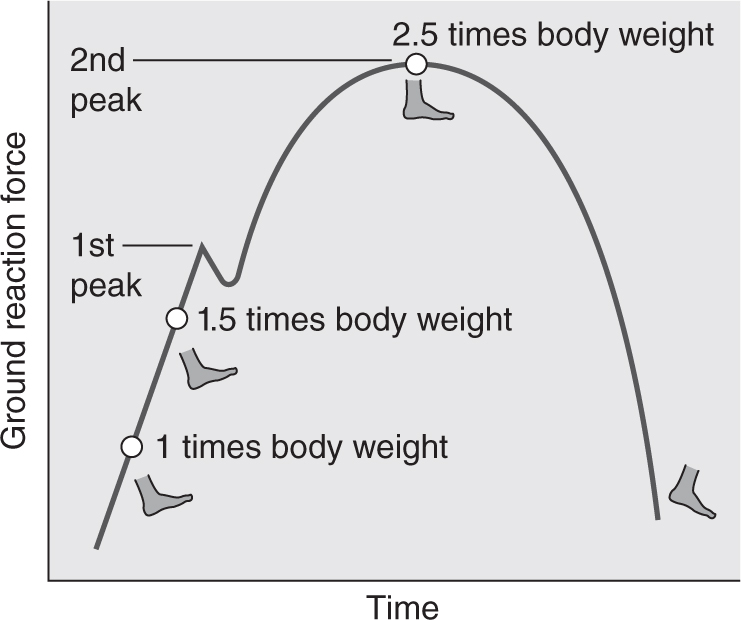
Figure 11.1 Force vs. time relationship for a heel-striker during stance. Note the very quick rise in impact force and the rapid attainment of a force equal to 1.5 times body weight.
Midfoot-Striking
When the midfoot-strike prevails, the stance phase of gait is usually shorter in duration, with the following steps occurring:
- Zero point (still point) is reached, just as was the case with heel-striking.
- The foot moves down and back and makes contact with the ground in the midfoot area (figure 11.2).
- A vertical, 90-degree shank angle is reached prior to attainment of a ground-reaction force equal to one times body weight. Note the difference from the heel-strike pattern, in which vertical shank angle was not attained until after forces equal to 1 and 1.5 times body weight were reached.
- A force equal to one times body weight is attained as the body moves forward over the foot.
- A force equal to 1.5 times body weight is reached as the body continues to move forward relative to the foot.
- Peak vertical force is produced.
- Take-off occurs.

Figure 11.2 Force vs. time relationship for a midfoot-striker during stance. Note the less rigid rise in impact force (compared to heel-striking) and the attainment of a vertical shank angle before even one body weight of force is provided.
The difference between these chains of events explains why midfoot-strikers are faster than heel-strikers, and why the best runners in the world almost always choose midfoot-striking over the heel-strike pattern. Note that with heel-striking, considerable amounts of vertical propulsive force are produced before the shank and leg reach a favorable mechanical position (before the shank reaches vertical), when force is pushing up and backward. With heel-striking, a significant amount of vertical force is produced prior to the attainment of the vertical shank and thus can only push the body up and back—since the shank angle is still positive when one times body weight and 1.5 times body weight are reached.
In contrast with a midfoot-strike, the large vertical forces of one and 1.5 times body weight are attained after the shank becomes vertical, when the leg is ready to push up and forward. Critical, vertical propulsive forces are produced too early and thus counter-productively and wastefully with the heel-strike pattern; on the other hand, with midfoot-landing, the major propulsive forces exert themselves at the proper time during stance.
Horizontal Forces
Horizontal braking forces resist the forward movement of the body, while horizontal propulsive forces promote the direct forward movement of the body. During stance, horizontal braking forces occurs first, immediately after ground contact, but eventually give way to horizontal propulsive forces as the stance phase proceeds. After the shank reaches a vertical (perpendicular) position with respect to the ground, horizontal braking forces disappear and horizontal propulsive forces progressively increase (figure 11.3).
The timing and magnitude of peak horizontal braking forces and peak horizontal propulsive forces are much different during heel-striking, compared with midfoot-striking. In both types of landings, braking forces steadily rise after the foot makes contact with the ground, and peak braking force is reached before the shank becomes vertical. After the shank becomes vertical, braking forces disappear and horizontal propulsive forces comes to the fore. This means that in order to minimize braking and to optimize forward propulsion and thus speed, a runner should reach a vertical shank angle as quickly as possible during stance.

Figure 11.3 Once the shank becomes perpendicular with the ground, horizontal braking forces end and horizontal propulsive forces begin.
From the two step-by-step gait events described previously in this chapter (with heel-striking and midfoot-striking), it becomes obvious that peak braking force is reached later in stance with a heel-strike, compared with midfoot-striking, since vertical shank angle is attained later in stance. In other words, braking plays a larger role during stance when the landing strategy is heel-striking. With a midfoot-strike, a runner can move more quickly out of braking into horizontal propulsive force. This creates less total braking action and a quicker shift into horizontal forward propulsion when midfoot-striking is the preferred landing mode. When midfoot-landings are used, results can include shorter contact times (and thus higher step rates and running speeds) and greater forward-directed force.
Although rarely mentioned in popular running magazines, online articles, and books, a key goal of training for runners is to position the shank and leg in the proper way and shift the force-time curve up and to the left. In other words, the runner who is interested in increasing speed should produce larger propulsive forces (after the 90-degree shank angle has been reached) and produce those forces more quickly than before. This may appear to be a paradox, since we have already mentioned that higher loading rates of force (VALRs) increase the risk of injury. However, bear in mind that the ratio of VALR/running velocity is always lower in good-form runners, compared with heel-strikers. Thus, good-form runners can shift the force-time curve to the left with a lower risk of injury, because there is less risk that VALR will exceed a critical, injury producing level. The problem that poor-form (common-form) runners have is that they produce very high VALR values at slow speeds; when they try to move the force-time curve up and to the left (i.e., try to move faster), they create monumental, injury producing VALRs). For the good-form runner, moving the force-time curve up and to the left leads to longer step lengths, quicker step rates, and thus higher running velocities, both in training and competition. Compared with heel-striking, midfoot-landings are much superior in this regard (figure 11.4).

Figure 11.4 One of the goals of form work is to shift the force-time curve up and to the left (i.e., to produce more propulsive force and to produce it more quickly. The good-from runner can do this with a low risk of injury because her ratio of VALR/running velocity is moderate [she can produce more speed with a lower VALR] and thus there is less risk of exceeding an injury producing threshold level of VALR).
■ The Critical 10 Milliseconds
It’s worth considering the “one-hundredth of a second effect.” Studies have demonstrated that midfoot-strikers generally have stance durations that are about one-hundredth of a second (10 milliseconds) shorter per step, compared with the stances of heel-strikers. This may seem like a small effect, but the disparity can become sizable in race situations.
For example, take the case of a heel-striker who wants to break through the 40-minute barrier for the 10K. Let’s say that she is taking 180 steps per minute and is currently capable of running the 10K in 41 minutes. In that time, she takes a total of 41 × 180 = 7,380 steps. If she shifts from heel-striking to midfoot-striking, she will save approximately 7,380 × .01 = 73.8 seconds, reducing her 10K finishing time to a very nice 39:46.2. Her time improvements in the half-marathon and marathon would be even greater. These time upgrades ignore the possible positive effects on step length when changing from heel- to midfoot-striking; the shift could lengthen steps also. (Remember that midfoot-strikes are more advantageous from the standpoint of the production of both vertical and horizontal propulsive forces.)
Effects of Foot-Strike Pattern on Injury
The human heel is a terrible shock absorber during the act of running. Two bones in the heel—the calcaneus and talus—stand between the running surface and the rest of the body. When the heel hits the ground, impact (ground-reaction) force is transmitted directly through the calcaneus and talus into the tibia, through the tibia to the knee, through the knee to the femur, through the femur to the hip, through the hip into the spine, and directly through the spine into the head. There is relatively little modulation of this impact force (shock), as it is transmitted directly and rapidly through the skeletal system.
By contrast, the human foot has 26 bones; 33 joints; and more than 100 muscles, tendons, and ligaments—all of which are capable of absorbing, distributing, and dissipating impact shock. When a midfoot-strike is chosen, these structures go to work to soften shock.
This explains why the heel-striker displays a rapidly developed, significant first peak in ground-reaction force on the force-time curve, a peak that is missing in the curve of the midfoot-striker. This first peak signifies the rapid increase in impact shock force experienced by the heel-striker. Various researchers have linked force-loading rate (the rate at which ground-reaction force increases after the foot makes contact with the ground, also called VALR for Vertical Average Loading Rate) to injury in runners (5, 6, 7). Force loading rate is higher in heel-strikers, compared with midfoot-strikers. Among runners, the higher the loading rate, the greater the risk of injury.
In running, the heel plays a key role, but that role is not intended to be shock absorption. The heel is poorly suited for absorbing shock and prefers to pass shock immediately “up the chain” into the rest of the body. The key role of the heel during stance is to provide proper stiffness, a variable that is strongly linked with running economy. But this stiffness has to be provided at the right time—not when the foot is making initial contact with the ground, which is when the stiffness will only help transfer shock up the leg to the knee, hip, spine, and head.
Shank Angle
Two shank angles are critically important: shank angle at initial impact (touchdown) with the ground (SAT), and shank angle at maximal vertical propulsive force (SAMVF). Among distance runners, SAT ranges from extremely positive (around 20 degrees, figure 11.5) to mildly positive (around five degrees, figure 11.6). The larger the positive SAT, the greater the braking force (and the duration of breaking force) during stance. Large shank angles also tend to be correlated with heel-striking, which promotes the sub-optimal magnitude and timing of force production. On the other hand, a negative shank angle increases the risk of falling and also decreases total vertical force production. Somewhat counter-intuitively, vertical force is a more important producer of speed, compared with horizontal force production. In fact, during very fast running, vertical force production can be 11 times greater than horizontal force production. It is entirely wrong to say, as many running publications are currently stating, that vertical forces are bad during running and should be minimized. The truth is that vertical forces are crucial. As a runner increases her vertical force production, her maximal running velocity and thus overall performances also increase. This is true for both sprinters and distance runners.

Figure 11.5 Highly positive SATs lead to heel-striking, longer stance times, lower step rates, greater braking forces, higher impact-force loading rates and thus greater “breaking” forces, and poor timing of vertical propulsive forces.

Figure 11.6 Slightly positive SATs lead to midfoot-striking, shorter stance times, higher step rates, reduced periods of braking forces, faster running speeds, smaller impact-force loading rates and thus lower “breaking” forces, and optimal timing of vertical propulsive force.
Video analysis of world-record performances at distances ranging from 100 meters all the way up to the marathon reveals that—in all cases except one—SAT falls within the range of a positive four to eight degrees (see tables 11.1 and 11.2). It is thus believed that optimal shank angle is within this range, probably close to six degrees. Astoundingly, the world-record holder in the 100 meters (Usain Bolt) and the world-record holder in the marathon (Dennis Kimetto) have very similar SATs: They both prefer seven-degree collisions, a similarity in form that is unlikely to be coincidence.
There is also an optimal negative shank angle associated with the highest-possible vertical ground-reaction force. A runner’s maximum speed and her ability to generate vertical ground-reaction force are tightly linked. It appears from video analysis of a variety of runners that this shank angle occurs at about negative 23 degrees. This is an angle that is reached more quickly during midfoot-striking, compared with heel-striking. In addition, heel-strikers may produce maximum vertical propulsive force before this angle is reached—at a sub-optimal time.


Reversal of Swing
Reversal of swing (ROS) is the change in shank angle that occurs between the still point (zero point, MSA) and initial contact with the running surface. During running, ROS has three functions:
- It can optimize SAT by moving the shank and foot into the correct position (with about a six-degree SAT).
- It can improve “punch,” or the force with which the foot and leg strike the ground at the end of ROS. Greater punch translates directly into higher vertical propulsive forces. Longer, higher-velocity sweeps improve punch, while abridged, sluggish sweeps diminish it.
- If small, it increases the chances that the foot is landing in a position too far ahead of the body. This increases horizontal braking forces and directs vertical propulsive forces upward and backward.
For comparative purposes, it is important to note that a runner like Usain Bolt has a zero point of about 27 degrees (on average) and an SAT of around 7 degrees, yielding an ROS of about 20 degrees and providing a tremendous amount of punch on the ground (figure 11.7). Dennis Kimetto has a zero point of about 14 degrees and an SAT of roughly seven degrees, yielding an ROS of seven degrees (figure 11.8).

Figure 11.7 ROS for Bolt is about 20.
By contrast, the average distance runner has a zero point (MSA) of around 18 degrees and an SAT of 16 degrees, yielding a minuscule and counter-productive ROS of only two degrees—with all the negative consequences associated with such a paltry amount of movement. With this kind of form, there is almost zero productive punch against the ground, horizontal braking forces are prolonged and maximized, and vertical propulsive forces are directed upward and backward. Fortunately, as this book explains, ROS and SAT are highly trainable.
Ratio of ROS to Maximum Shank Angle (ROS/MSA)
One final form variable is extremely important: the ratio of ROS to the shank angle at zero point (MSA), which we can call the “golden ratio” (ROS/MSA). This ratio ties together two critical variables—the zero point and SAT—and thus provides a great deal of information about a runner’s form, just as v O2max reveals more about an athlete’s running capacity than O2max alone. (O2max is a runner’s maximal aerobic capacity, but vO2max is a runner’s actual running velocity when O2max is attained, which is a more valuable piece of information.)
O2max reveals more about an athlete’s running capacity than O2max alone. (O2max is a runner’s maximal aerobic capacity, but vO2max is a runner’s actual running velocity when O2max is attained, which is a more valuable piece of information.)
As mentioned earlier, Usain Bolt has a typical MSA of about 27 degrees and an SAT of 7 degrees, yielding an ROS of 20 degrees. Thus, his ratio, ROS/MSA is roughly 20/27 or .74. Dennis Kimetto has a ratio of 7/14, or .5, reflecting the slower running speed required for the marathon and thus a lower dependence on a powerful punch. In contrast, the average distance runner who is attempting to run quickly has an MSA of 18 degrees, an SAT of 16 degrees, and thus an ROS of only two degrees. That creates a disastrous ratio of 2/18 = .11 This is the ratio used by Bolt and Kimetto when they are in full braking mode—when they are trying to stop!
The ratio of ROS/MSA can vary widely among runners, but video analysis of the world’s best sprinters reveals that the ratio always falls in the range of about .7 to .75. Video analysis of the world’s best distance runners demonstrates that the ratio is always within a range of .5 to .75. During Eliud Kipchoge’s 2017 attempt to break the two-hour time barrier for the marathon (when he ran 2:00:24), his ratio was consistently close to .7. Video analysis of the common-form runner shows a ratio in the range of .1 to .2. The ratio of ROS/MSA is key, reflecting the quality of both a runner’s ROS and the way in which she interacts with the ground, and yet it is completely ignored by most coaches and runners. Like its components, ROS and SAT, the ratio is highly trainable, and improvements in the ratio can lead to huge gains in running performance. Runners can develop the capacity to punch the ground more powerfully, and yet with less risk of injury.
Summary
Every serious runner wants to improve speed. Unfortunately, few serious runners are working on changing FAT, SAT, ROS, and ROS/MSA, let alone changing them in the directions that are actually necessary to boost speed. (In fact, most runners are completely unaware of these critical variables.) Runners are usually focused on improving the capacities of the heart and muscles only, which is akin to fine-tuning the engine of a high-quality car and then outfitting the vehicle with square wheels. Only when runners’ highly developed physical capacities are matched with the optimization of all the key form variables can runners attain their highest-possible performances.
References
- Walt Reynolds, personal communication, April 7, 2017
- M.O. de Almeida et al., “Is the Rearfoot Pattern the Most Frequent Foot Strike Pattern Among Recreational Shod Distance Runners?” Physical Therapy and Sport, e-published (accessed February 24, 2014). doi: 10.1016/j.ptsp.2014.02.005. Epub 2014 Feb 26.
- M.E. Kasmer et al., “Foot-Strike Pattern and Performance in a Marathon,” International Journal of Sports, Physiology, and Performance 8, no. 3 (2013): 286–292.
- W. Reynolds. “Midfoot Landings and the Production of Propulsive Forces During Running,” www.runhackers.com (accessed December 7, 2016).
- H.P. Crowell and I.S. David, “Gait Retraining to Reduce Lower Extremity Loading in Runners,” Clinical Biomechanics 26 (2011): 78–83.
- A.I. Daoud et al., “Foot Strike and Injury Rates in Endurance Runners: A Retrospective Study,” Medicine & Science in Sports & Exercise 44, no. 7 (2012): 1325–1334.
- I.S. Davis, B.J. Bowser, and D.R. Mullineaux, “Greater Vertical Impact Loading in Female Runners With Medically Diagnosed Injuries: A Prospective Investigation,” British Journal of Sports Medicine, http://bjsm.bmj.com (accessed April 1, 2016).