2
Comparing Ordinary and Elite Runners
The average distance runner runs with the same form that Fred Flintstone employed to slam on the brakes in his Stone Age car. Fred did not sweep the ground as he moved his feet; he simply stuck his straight legs out and put his heels on the ground. True, most distance runners don’t yell “yabba-dabba-doo!” with each foot-strike, but they do mimic many of the anatomical and neuromuscular elements of Fred’s car-stopping pattern as they attempt to move along the ground. Specifically, they land with a relatively straight leg, with the knee approaching a 180-degree angle (a straight line from the waist to the ankle). They also hit the ground heel first, with little backward sweep and the foot well in front of the body (figure 2.1). Fred Flintstone undoubtedly used these straight-leg, heel-striking, ground-impact techniques because he knew they were associated with maximal braking forces and thus represented the best way to stop a car suddenly. The average runner uses Flintstone form because he knows no better and because his pattern of running has been corrupted by the modern running shoe.

Figure 2.1 Most runners land on their heels, with a nearly straight leg.
Ordinary Running Form
If you doubt that heel-striking is so commonplace, consider a study of 514 recreational runners in Sao Paulo, Brazil, in which foot-strike patterns during running were evaluated with a high-speed camera (1). The researchers found that 95 percent of the runners were heel-strikers, landing on their heels as they ran instead of landing on their mid-feet or forefeet (see figure 2.2). Only 21 of the 514 runners (4 percent) were midfoot-strikers, and just four participants (fewer than 1 percent) landed with a forefoot pattern.
In another study, conducted with 936 marathon and half-marathon runners in Manchester, New Hampshire, researchers found that 88.9 percent of the competitors were heel-strikers, 3.4 percent were midfoot contactors, 1.8 percent were forefoot-strikers, and 5.9 percent featured “discrete foot strike asymmetry”—in other words, the right foot and left foot made contact with the ground differently (2). Although such foot-strike asymmetry might seem odd, it is actually relatively commonplace. Many runners’ right and left legs also differ dramatically in other key aspects of form, including the angles with which the legs initially contact the ground and the amounts of swing and sweep that occur between ground contacts (swing and sweep will be explained in more detail later in this chapter).
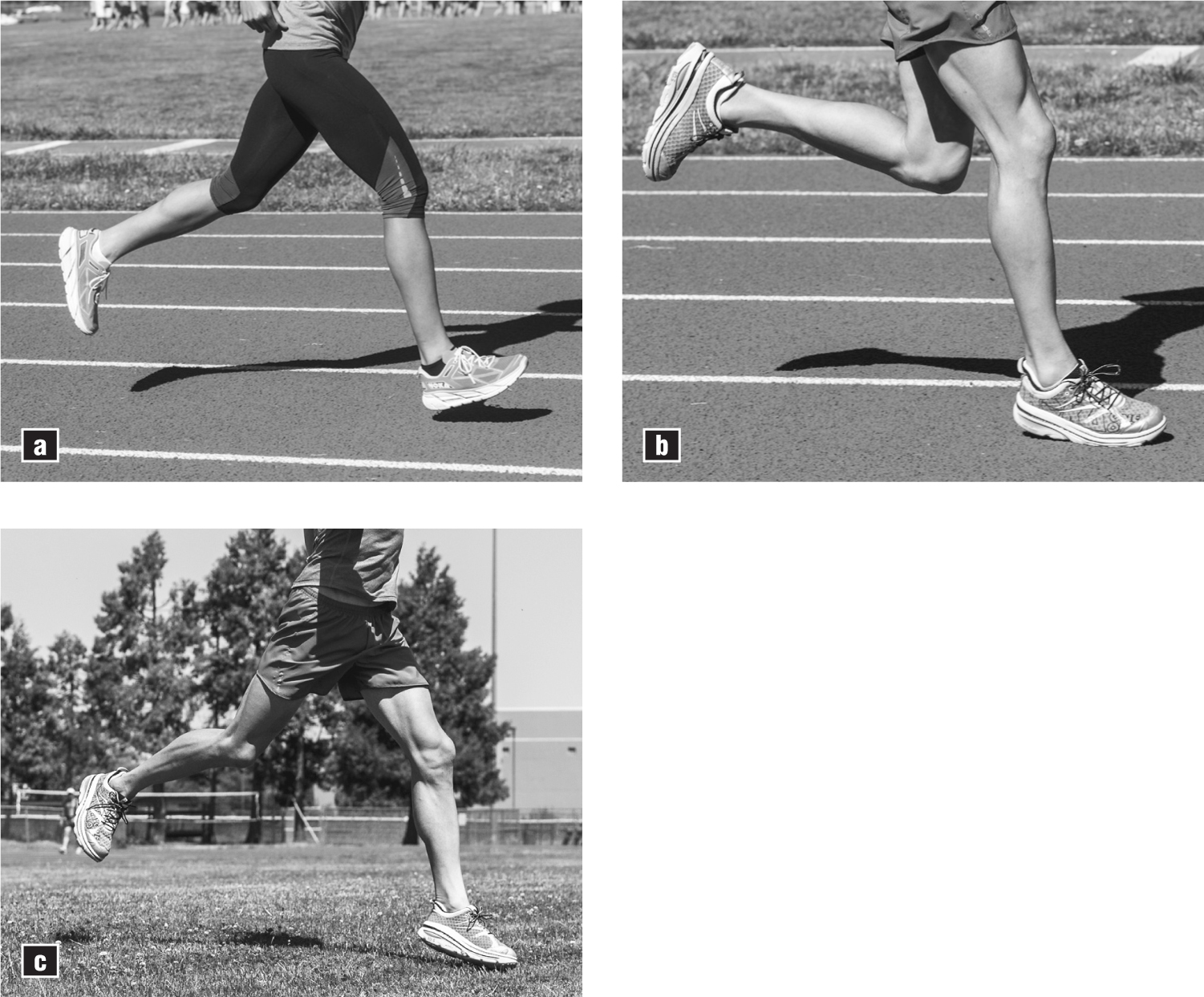
Figure 2.2 (a) Heel-striking, (b) midfoot-striking, and (c) forefoot-striking.
An intriguing finding in the New Hampshire research was that form and fatigue were linked. Among 286 marathon runners who were observed at both the 10K and 32K points of the marathon, the frequency of heel-striking had increased at the 32K mark, compared with the 10K checkpoint. This is undoubtedly because of the advanced tiredness and augmented muscle, tendon, and skeletal discomfort associated with later stages of the marathon. It also reflects the loss of springiness and energy return properties of marathoners’ legs as the race progresses. These marathoners were most likely attempting to rely on their shoes for greater cushioning, energy return, and discomfort protection as their own muscles and tendons became fatigued and thus less protective. As a result, the runners naturally gravitated toward landing on their heels, where midsole cushioning achieves its greatest depth and height (not to mention brightest color).
Such a change in form is understandable. When your legs are tired or feeling weak, it is only natural to want to land on a soft object rather than something a bit harder and less pillowy. However, the truth is that impact forces are actually not reduced by heel-striking, compared with midfoot landing. In fact, peak loading rate (the rate at which impact force increases after first contact with the ground) is actually greater with heel-striking, compared with midfoot landing—even when heel-strikers are wearing “battleship” running shoes with massive heels and midfoot-strikers are running barefoot with no protective cushioning at all. Of course, as shocking at it might seem, unshod runners are cushioned by their natural mechanisms, including the actions of the muscles, tendons, ligaments, and joints after contact with the ground (figure 2.3). Runners sometimes forget that their lower limbs do not have to be treated as weak, high-risk appendages that must be protected by external devices such as running shoes. If they are operating correctly, their own legs can be great shock-attenuating structures.

Figure 2.3 Heel-strike landing with high initial loading rate of impact force and mid-foot landing with reduced initial loading rate of impact force.
In a separate study of 1,991 participants at the Milwaukee Lakefront Marathon, researchers found that 1,865 (93.7 percent) of the runners, utilized a heel-strike landing pattern (3). Interestingly, in this research the foot-strike pattern was linked to performance: The faster runners in this marathon were much less likely to strike the ground with their heels first, instead tending to be midfoot-strikers. Male and female runners did not experience gender-related differences in foot-strike classification: Both men and women preferred heel-strike conduct on the roads (figure 2.4).
In an outstanding study of 415 runners at a half-marathon in Japan, researchers once again discovered a preference for heel-striking and also found a strong connection between foot-strike pattern and finishing time (4). In this study, heel-striking was detected in “only” 74.9 percent of the athletes, while midfoot-striking was found in a more-salubrious 23.7 percent of participants. However, the relatively low frequency of heel-striking was a result of the inclusion of elite-level runners (including Olympians) in the research. Among the top 69 runners in this race, 36 percent were midfoot-strikers—about seven times the ratio one would expect in a competition with no elite performers.

Figure 2.4 Both men and women tend to heel-strike.
In this Japanese study, average contact time with the ground was significantly higher for heel-strikers, compared with midfoot contactors. Heel-strikers spent an average 200 milliseconds on the ground per step, versus just 183 milliseconds for mid- and forefoot-strikers.
It is clear from these latter two studies that foot-strike pattern is an element of form that is strongly related to running speed: Midfoot-strikers tend to be faster than heel-strikers. One reason for this is that superior runners may be more apt to recognize that a heel-striking pattern—with its usually stronger braking forces and longer ground-contact times—has a slowing effect on their running. Another factor is that contact time is in itself strongly related to running speed, since shorter contact times lead directly to higher stride rates. For a runner, maximal speed is the optimal combination of stride rate and stride length as expressed by the equation Running Speed = Stride Rate × Stride Length. The higher the stride rate, the loftier the maximal speed (as long as the increase in stride rate does not shorten stride length). Thus, midfoot-striking, shorter ground-contact times, and faster running are strongly linked.
From a performance standpoint, one can readily see that the two elements of common form discussed so far—landing with straight legs, with the feet well in front of the body, and striking the ground with the heels—are non-optimal. The straight-leg landing directs overall force at landing upward and backward, instead of forward. A runner with such form is commencing the critical, force-producing phase of gait (ground contact) by powerfully pushing himself upward and backward, instead of forward (figure 2.5).
Heel-striking also hurts performance by elongating the stance (contact) phase of running. The ground-contact difference of 17 milliseconds per step (for heel-strikers versus forefoot-strikers)—as detected in the Japanese study—would have a profound effect on performance. Bear in mind that, from the perspective of the foot, a runner moves forward only during the flight phase of gait: During stance, a runner is anchored to the ground and cannot move forward. In fact, a key progression as a runner becomes faster is the partitioning of gait so that less time is spent on the ground and relatively more time is spent flying forward. This becomes a much harder progression for heel-strikers, since they are inherently glued to the ground for a longer time per step, compared with midfoot-strikers.

Figure 2.5 The force of heel-striking pushes a runner up and backward instead of forward.
And the numbers can really add up. Take the case of a heel-striker who runs the 5K in 18:36 (a pace of six minutes per mile, or six minutes per 1.6 kilometers) with a cadence of 170 steps per minute. With each step, he is spending about 17 milliseconds longer than necessary on the ground (compared with midfoot-striking). At first glance, that sounds like very little time lost. However, completing the math reveals that 18.6 minutes × 170 steps per minute × .017 seconds = 53.8 seconds “lost” to glued-on-the-ground foot contact over the duration of the 5K. This runner could be running the 5K in 17:42.2 if he opted for a midfoot landing pattern, all other factors being equal. Another way to examine the situation is to say that the runner is losing 6 × 170 × .017 = 17.3 seconds per mile because of his foot-strike habits.
What Would Kenyans Do?
Not all elite Kenyan runners have perfect form, but the contrast between elite Kenyan runners and running form among non-elite runners could not be more dramatic. Elite Kenyans tend to land with flexed knees rather than straight legs and with the landing foot closer to a position under the body’s center of mass, instead of far ahead of the hips and torso (they exhibit large amounts of sweep with each step in order to bring the foot closer to the body at contact). Furthermore, elite Kenyan distance runners tend to land on the midfoot area, instead of sharply on the heel (figure 2.6).
In an informal study carried out at the Kenyan national cross-country championships in Nairobi in 2016, more than 80 percent of the competitors ran with a midfoot landing pattern (compared with the 4 to 5 percent usually observed among non-elite, non-Kenyan runners and the 36 percent observed in the Japanese research completed with elite non-Kenyans) (5).
In contrast with elite Kenyans, elite American runners are much more likely to be heel-strikers. Such notable American runners as Ryan Hall, Kara Goucher, Shalane Flanagan (figure 2.7), and Desiree Linden are (or have been) profound heel-strikers. Not surprisingly, elite American harriers appear to have a higher injury rate, compared with their Kenyan peers. Remember that peak loading rates for impact forces are much higher with heel-striking, compared with midfoot landing, and peak loading rate is a key predictor of running injury. The differences in performance capability do not need to be mentioned here, but remember that heel-striking leads to longer ground-contact times and thus lower stride rates and sub-optimal speeds.
Compared with the average runner, elite Kenyans also have greater sweep of each foot when they run. In other words, the forward-moving swing foot—once it has reached its most advanced forward position—tends to sweep backward toward the ground more dramatically, compared with most runners and even compared with American elites (6) (figure 2.8a and b).

Figure 2.6 Top-level African runners are nearly always mid-foot strikers.
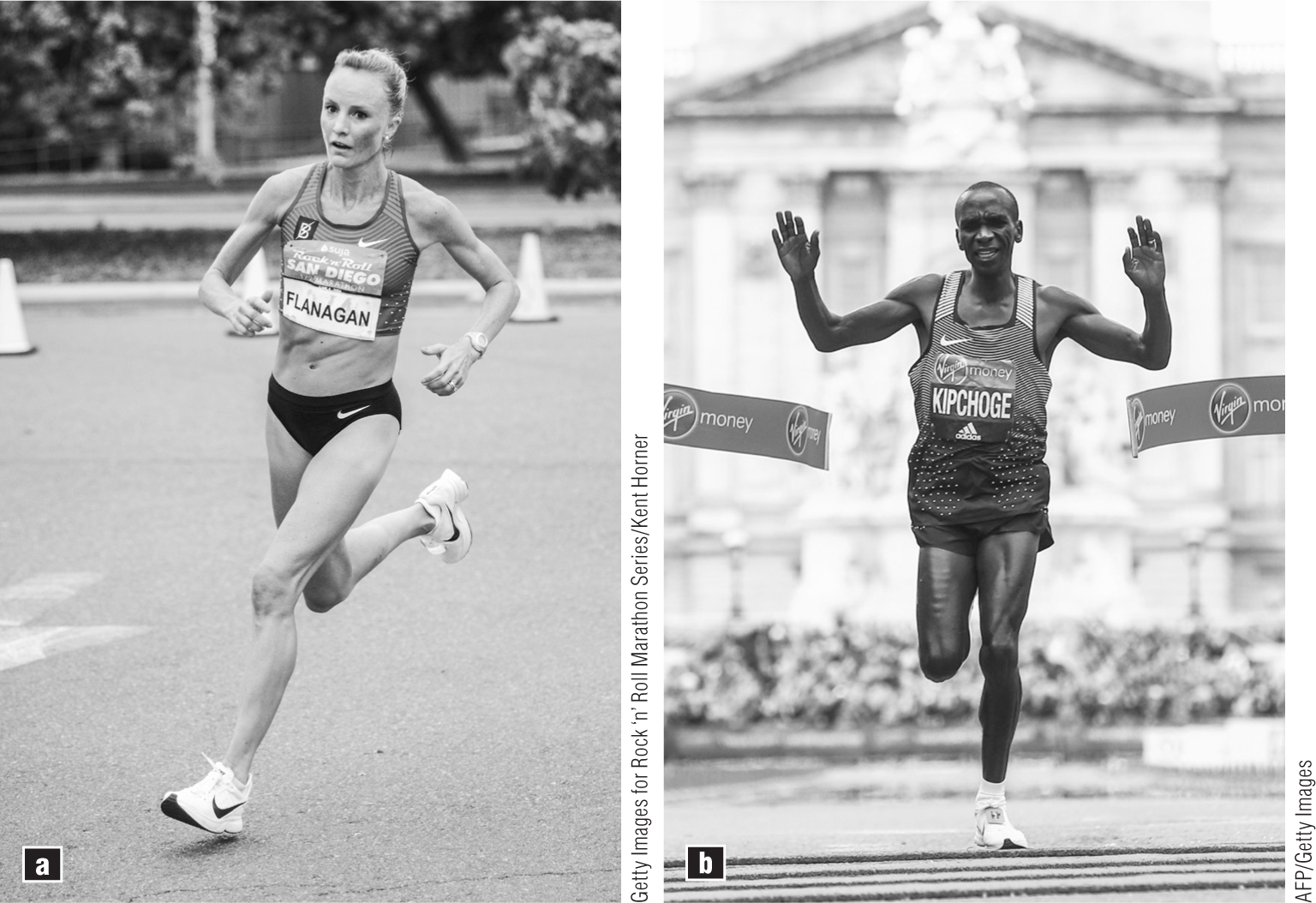
Figure 2.7 American distance stars such as Shalane Flanagan (a) have been heel-strikers during their careers, whereas top Kenyan athletes such as Olympic gold medalist Eliud Kipoge (b) are universally mid-foot strikers.
For now, sweep can be visualized in this way: As a runner moves along, his airborne swing leg and foot move forward ahead of his body. Eventually, the foot stops moving forward relative to the body and is poised to begin moving backward and downward to make contact with the ground. This most-forward position of the foot is referred to as the “still point” (7).
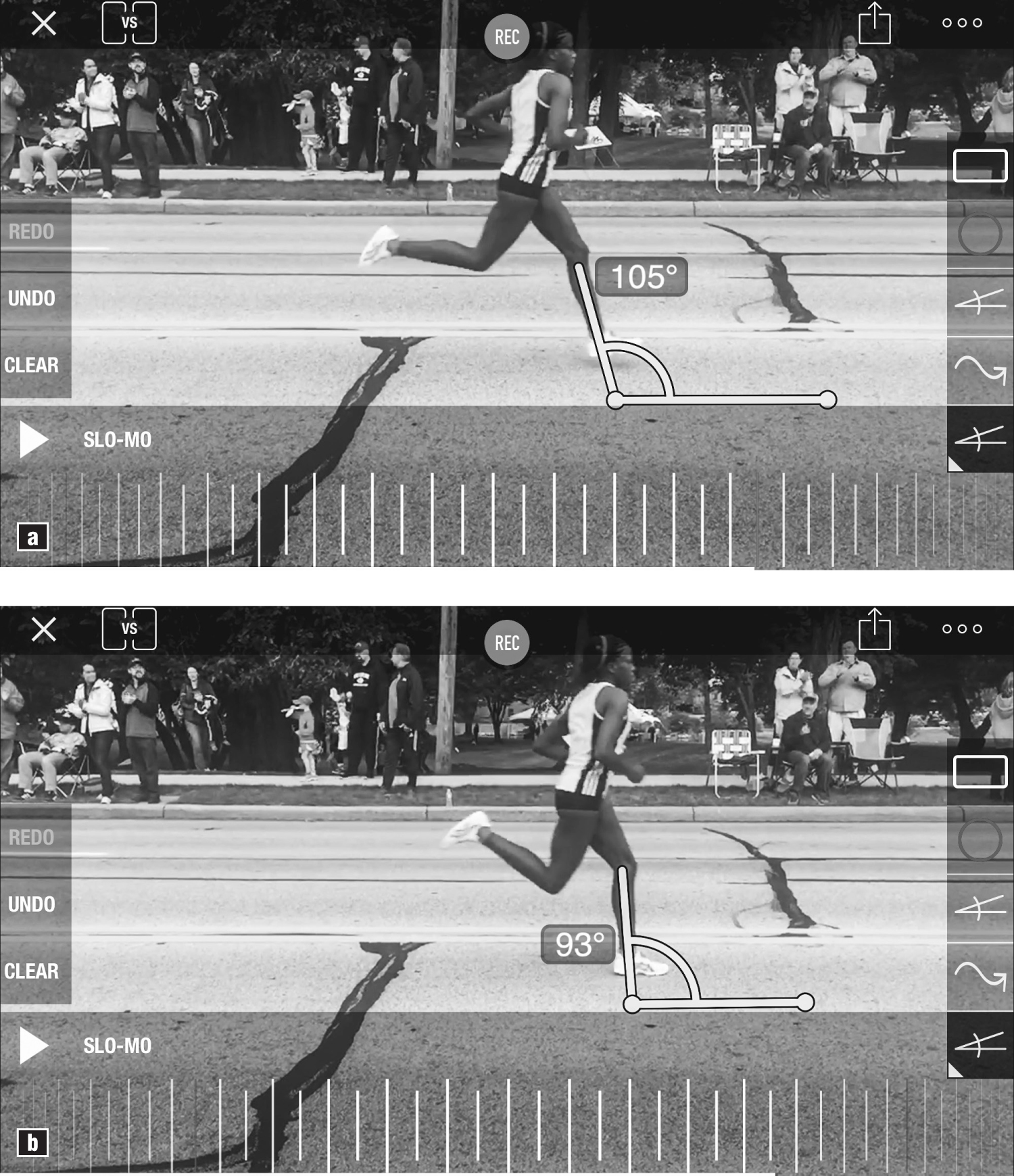
Figure 2.8 In an 8k race, elite Kenyan athlete Caren Maiyo exhibited a maximum shank angle (MSA) of 15 degrees (a), and a shank angle at touchdown (SAT) of 3 degrees (b), for a lofty sweep of 12 degrees and a “golden ratio” (Sweep/MSA) of 12/15, or .80, which is very typical of top Kenyan runners. In contrast, most elite U.S. distance runners have “rusty ratios” of less than .50. (For information on MSA and SAT see p. 33)
From the still point, a runner’s foot has only one place to go: toward the ground. In essence, the foot should be sweeping backward and downward from the still point to make contact with terra firma. Fortunately from the standpoint of improving form, this sweeping action can be quantified. It is simply the difference between the maximum angle made by the shin or shank of the leg as it moves forward during swing and the angle made by the shin as the foot makes first contact with the ground (refer back to figure 2.8a and b). The difference between these two angles is called “sweep.”
The average jogger may have a lofty maximal shank angle (the largest angle the shank makes during forward swing of the leg) of 18–22 degrees or so, prior to sweep (figure 2.9), while the elite Kenyan marathoner is commonly at 14 degrees or so (8). (Bear in mind there can be considerable variation among Kenyan elites.) That sounds good for the typical runner, doesn’t it? Can’t the jogger take longer strides and cover more ground than the elite Kenyan that way? Wouldn’t the elite Kenyan be even faster if he would only stretch out his steps a little more?
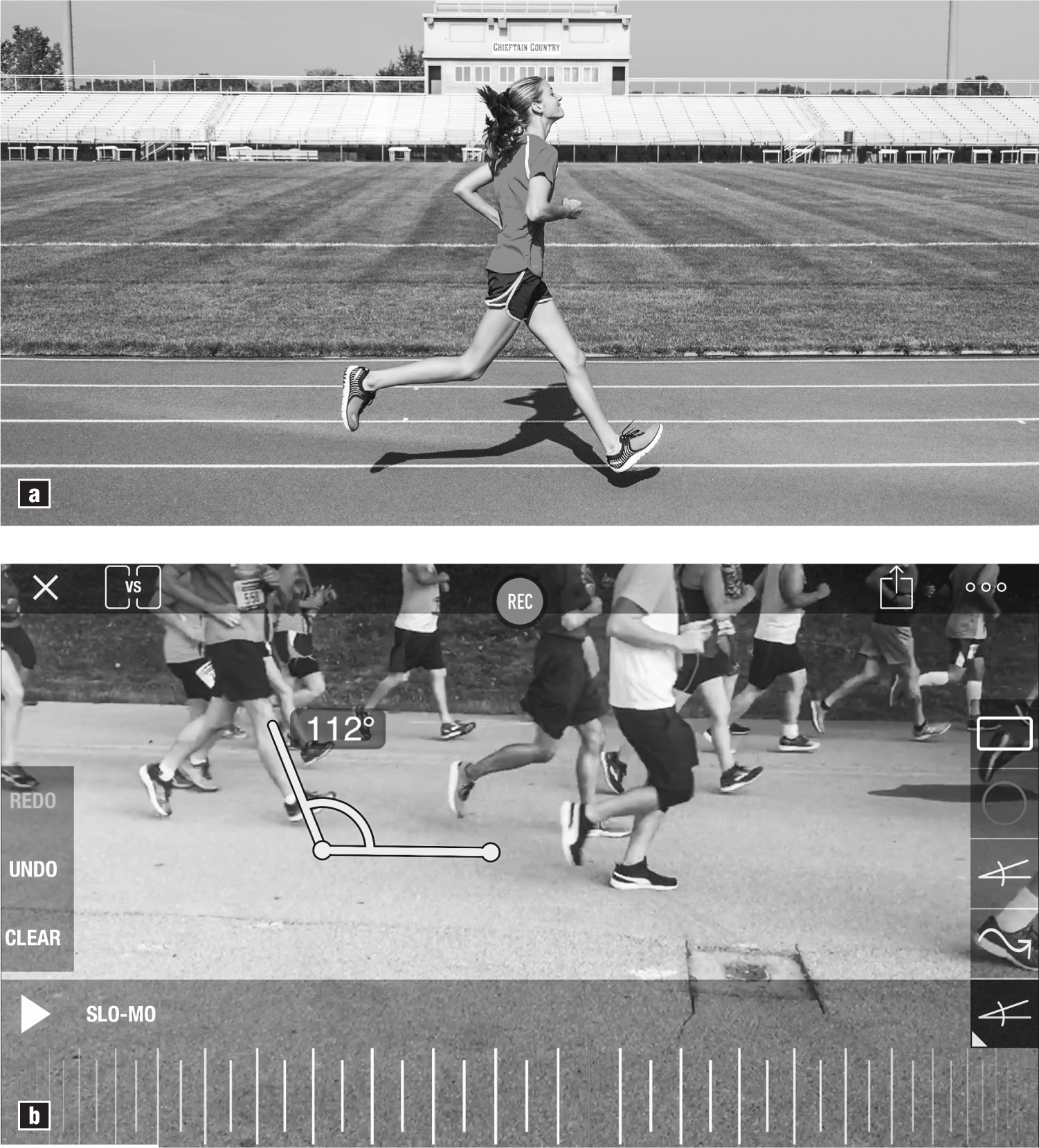
Figure 2.9 (a) Average runner overstriding. (b) The average runner, even at slow speed, often reaches an MSA of up to 22 degrees (112 - 90 = 22).
Unfortunately, when the average runner’s foot hits the ground, the shank angle at initial ground contact is likely to be 15 to 16 degrees (9). That is a sweep of a paltry two to three degrees (remember that sweep typically begins at a maximal shank angle of 18 degrees). With a sweep of just two to three degrees, the foot is accelerated toward the ground only minimally. Bear in mind that the force placed on the ground, and thus the propulsive actions that result, depend on the velocity with which the foot hits the ground. Not much velocity can be generated during a two-degree sweep to the ground; it is simply too short to get the leg moving at high speed.
By contrast, elite Kenyans sweep about eight degrees: Although there is considerable variation among elites, the elite Kenyan often starts with a maximum shank angle of 14 degrees and hits the ground with the shank at six degrees or less (10). He can generate a much higher foot velocity during this longer sweep and, therefore, can create a stronger reaction with the ground and an increased amount of propulsive force (figure 2.10a and b).
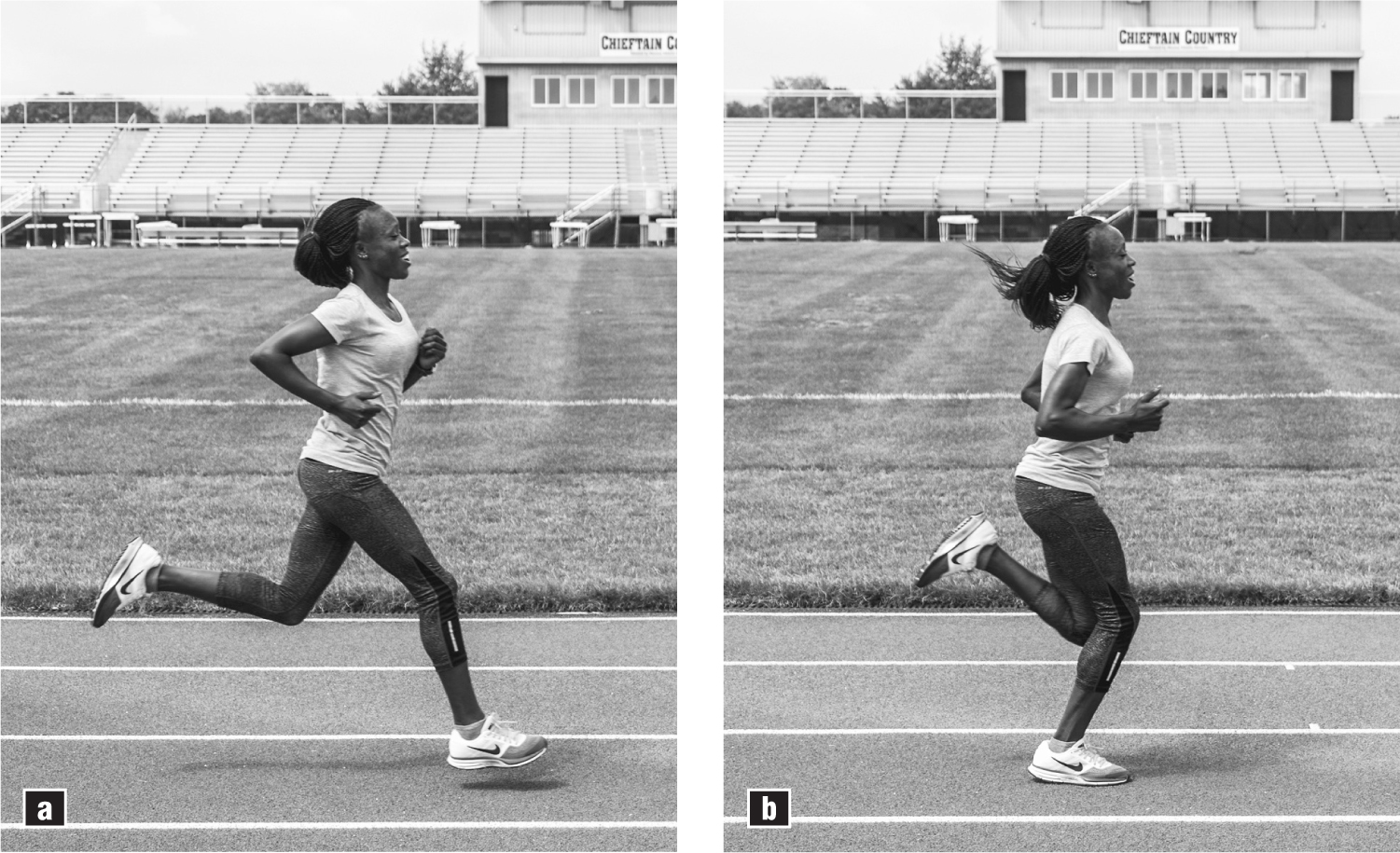
Figure 2.10 Kenyan runners do a better job of explosively sweeping the foot back to the ground after it has swung forward, instead of simply letting it fall to the earth.
Don’t forget, also, that the braking action created when the foot hits the ground is dependent on shank angle: The greater the angle, the higher the braking force. Excessive Flintstone braking is not ideal when trying to run faster and improve performance. So, the form taken up by the average runner (large max shank angle, tiny sweep, foot contact well ahead of the body) is conducive to braking and slow speed, while the form adopted by the elite Kenyan (more expansive sweep, foot contact closer to the body) is appropriate for creating greater propulsive forces against the ground and faster running.
Kenyan Cadence
Compared to average runners, elite Kenyans also run with a higher cadence, or the number of steps taken per minute. Research and anecdotal observation have revealed that the average runner has a stepping rate of about 160 steps per minute at a variety of speeds (11). In contrast, elite Kenyans (and elite runners in general) run with a cadence of about 180 to 200 steps per minute (12).
The implications of this difference are obvious. As mentioned previously, running speed is simply the product of stride rate and stride length, as expressed by the equation Velocity = Stride Rate × Stride Length. Maximal velocity is directly linked with distance-running performance and is obtained through an optimal combination of stride rate and stride length. Anything that thwarts the development of a higher stride rate—for example, heel-striking and landing with the foot far ahead of the body—will hamper the improvement of maximal speed and therefore performance.
Importantly, shank angle at initial contact with the ground (SAT) also tends to be significantly different between the elite Kenyan and average runner. Bear in mind that shank angle at contact with the ground can vary tremendously among all runners. A large shank angle of 16 to 18 degrees or more at touchdown will lead to strong, drawn-out braking forces when the foot is on the ground. This can be attributed to the initial production of upward- and backward-directed vector forces and also the time required to move the foot relative to the body to produce forward-horizontal propulsive force. (It is impossible to produce forward propulsive force when the foot is ahead of the body.) A smaller shank angle of about six degrees at contact will decrease braking forces and reduce the time required to end the braking phase of stance and move into forward-horizontal force-production mode. A negative shank angle at ground contact means that essentially no braking force is produced but also signifies that the runner is on the brink of falling on his face.
While shank angles at initial ground contact of approximately 16 degrees are frequently observed in average runners, shank angles at first ground contact range from zero to seven degrees in most elite Kenyans. Fortunately, initial shank angle is highly trainable and can be made more Kenyan-like in runners of all ability and experience levels, from the novice jogger to even the most road-toughened and experienced high-shank-angled American runner.
The amazingly high frequency of heel-striking among non-Kenyan runners has suggested to some running observers that the heel-strike, ground-contact mode is the normal and healthy way to run. In this view, it appears elite Kenyan runners have developed a specialized way of interacting with the ground, a way that is unnatural but necessary for their trade as professional athletes (just as professional baseball pitchers hold and throw the ball differently compared with the novice baseball player in the street).
However, careful investigation reveals such thinking is in error. In the 1950s, research conducted with high-speed video cameras revealed that almost all runners in the study contacted the ground with the midfoot or forefoot, with the mode of contact dependent on preferred competitive distance. As race distance increased (and therefore race speed declined), runners tended to land on the midfoot; as competitive distance shortened and race velocity increased they tended to land on the forefoot (13).
What has caused the human race to evolve so rapidly in this way in only 50 years or so, with nearly complete abandonment of forefoot- and midfoot-striking and the rise of a new class of humans who prefer banging the ground with their heels?
It is likely that the advent of the modern running shoe has produced this corruption of form. Although there has been a recent trend toward the use of minimal running shoes and even a movement advocating the adoption of an unshod running style, the au courant running shoe—the kind of running shoe to which most customers are directed by watchful store merchants—remains a kind of heavy, highly colorful, and creatively designed “battle wagon” in which a runner’s feet are to be embedded. In particular, the modern running shoe has a raised heel with an especially thick layer of bright-hued foam underneath.
Researchers at Harvard University have recently pointed out that runners who usually run barefoot are almost never heel-strikers; in fact, they usually make first contact with the ground with the forefoot or midfoot (14). In contrast, runners who are accustomed to running in modern shoes almost always hit the ground heel-first (15).
I have taken extensive videos of Kenyan children playing and running and have reached similar conclusions (16). The frequency of heel-striking among barefoot Kenyan children during running is nearly zero, whereas the frequency of heel-striking rises significantly for Kenyan children wearing up-to-date footwear—especially for those wearing modern running shoes with colossal heels. One can only conclude that running shoes with large heels “push” runners toward landing on the cushioned spots of the shoes, places where the most foam is piled into the midsole and where the landing feels softest and safest (even though it actually is not).
How have elite Kenyan runners managed to evade this undesirable heel-striking pattern? After all, they also wear modern running shoes with big heels, especially during training, and many up-and-coming Kenyan athletes yearn for a shoe-company contract and the opportunity to be provided with free big-heelers year-round.
Figure 2.11 Young Kenyan runners often train barefoot.
An often-forgotten factor is that most elite Kenyan runners start their running careers very early in life, running intensely over the Kenyan countryside—unshod (figure 2.11). It is likely that such runners develop not only tremendous foot and ankle strength as a result of their barefoot running, but also become locked into a running style that features midfoot ground contacts. After all, few young runners would want the force of impact against roots, sharp stones, fragments of glass, and hard dirt to fall solely on their heels; it is simply too painful. Rather, young, Kenyan, soon-to-be-elite harriers learn to distribute impact forces around the foot by landing with a midfoot-contact pattern. They probably also develop superior “proprioception” by running in this way, or an enhanced ability to feel the way in which the foot is interacting with the ground and to react accordingly during force production. It is unlikely that these advantages would be abandoned completely in favor of landing on colorful mush with just the heel.
Kenyan Running Posture
Postural elements are also different between elite Kenyan runners and all average runners. During running, posture entails the relative positions of the head, neck, and trunk (straight, curved forward, or curved backward) and also the positioning and actions of the arms and the rotation of the trunk during forward movement (17). In general, the elite Kenyan has a straighter posture (with head, neck, and trunk in a straight line rather than hunched forward or stretched backward), compared with the average harrier. Kenyan arm movement tends to be more economical, with less “winginess” and much less vertical lifting of the arms. Rather, the arms tend to swing naturally like pendulums with little muscular effort. Finally, the best Kenyans tend to avoid wash-tub-like, energy-wasting, speed-demoting rotations of the trunk, even at high speeds. Techniques for developing optimal posture will be discussed fully in chapter 10.
The reasons for (and outcomes of) these differences in foot-strike pattern, sweep, cadence, shank angle at ground contact, and posture will be discussed fully in this book. Note that the average runner is not expected to move biomechanically with the exact patterns of (or the same running speeds as) an elite Kenyan runner. But these disparities in form have profound implications for running economy, risk of injury, and running performance and thus help create guidelines for establishing better form for both the average and elite runner.
Summary
The form of the average runner differs in a number of key ways from the form adopted by the fastest runners in the world. The average runner demonstrates very little sweeping action with each foot and tends to hit the ground on her heel, with a relatively straight leg, and with the foot well ahead of her center of mass. This pattern is reinforced by the modern running shoe, with its high, big-heeled construction pushing runners toward heel-strikes.
In contrast, Kenyan elite runners are the world’s best sweepers and favor midfoot-strikes with less-straight legs and with the foot closer to the center of mass. This gait pattern is linked with the greatest performance possibilities and the least likelihood of injury.
References
1. M O de Almeida et al., “Is the Rearfoot Pattern the Most Frequently Used Foot Strike Pattern Among Recreational Shod Distance Runners?” Physical Therapy in Sport 16, no. 1 (2015): 29–33.
2. P. Larson et al., “Foot Strike Patterns of Recreational and Sub-Elite Runners in a Long-Distance Road Race,” Journal of Sports Sciences 29, no. 15 (2011): 1665–1673.
3. M.E. Kasmer et al., “Foot-Strike Pattern and Performance in a Marathon,” International Journal of Sports Physiology and Performance 8, no. 3 (2013): 286–292.
4. H. Hasegawa, T. Yamauchi, and W.J. Kraemer, “Foot Strike Patterns of Runners at the 15-km Point During an Elite-Level Half Marathon,” Journal of Strength and Conditioning Research 21, no. 3 (2007): 888–893.
5. Owen Anderson, unpublished video analysis of the event (2016).
6. Walter Reynolds, personal communication based on video analysis of hundreds of elite and ordinary runners, July 7, 2017.
7. Walter Reynolds, personal communication, July 7, 2017.
8. Ibid.
9. Ibid.
10. Ibid.
11. J.F. Hafer et al. “The Effect of a Cadence Retraining Protocol on Running Biomechanics and Efficiency: A Pilot Study,” Journal of Sports Sciences 33, no. 7 (2014): 1–8.
12. J. Daniels, Daniels’ Running Formula (Third Edition) (Champaign, IL: Human Kinetics, 2014), 26.
13. T. Nett, “Foot Plant in Running,” Track Technique 15 (1964): 462–463.
14. D.E. Lieberman et al., “Foot Strike Patterns and Collision Forces in Habitually Barefoot Versus Shod Runners,” Nature 462 (2010): 531–535.
15. Ibid.
16. Owen Anderson, unpublished video taken in Kenya (2011–2012).
17. Walter Reynolds, personal communication, August 1, 2017.