“I can calculate the motion of heavenly bodies but not the madness of people.”
—Sir Isaac Newton
Since man has looked up to the stars, we have always tried to find a reason as to why they move the way they do. The stars and planets make elliptical orbits, but this violates Newton’s First Law in which objects will continue to move straight. What was making these orbits elliptical? Our first answers explained motion in a linear fashion. Then we added a second dimension and our motion became parabolic. Now we will explore when objects begin to undergo circular motion. Then we will have a better understanding of the orbit of our Moon around the Earth and the Earth around the Sun.
Let’s simplify matters and consider the object’s speed around its path to be constant. This is called uniform circular motion. You should remember that although the speed may be constant, the velocity is not, because the direction of the velocity is always changing. Since the velocity is changing, there must be acceleration. This acceleration does not change the speed of the object; it changes only the direction of the velocity to keep the object on its circular path. Also, in order to produce an acceleration, there must be a force; otherwise, the object would move off in a straight line (Newton’s First Law).
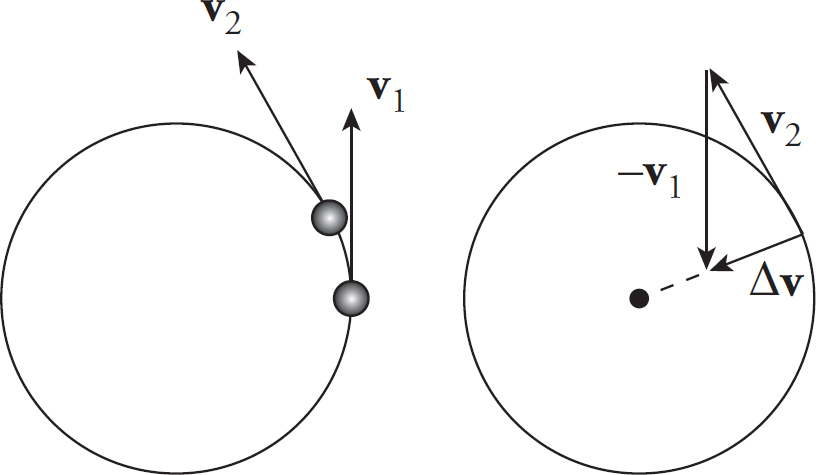
Take a look at the figures below. The figure on the left shows an object moving along a circular trajectory, along with its velocity vectors at two nearby points. The vector v1 is the object’s velocity at time t = t1, and v2 is the object’s velocity vector a short time later (at time t = t2). The velocity vector is always tangential to the object’s path (whatever the shape of the trajectory). Notice that since we are assuming constant speed, the lengths of v1 and v2 (their magnitudes) are the same.
Since Δv = v2 − v1 points toward the center of the circle (see the figure on the right), so does the acceleration, since a = Δv/Δt. Because the acceleration vector points toward the center of the circle, it’s called centripetal acceleration, or ac. The centripetal acceleration is what turns the velocity vector to keep the object traveling in a circle. The magnitude of the centripetal acceleration depends on the object’s speed, v, and the radius, r, of the circular path according to the equation

Example 1 An object of mass 5 kg moves at a constant speed of 6 m/s in a circular path of radius 2 m. Find the object’s acceleration and the net force responsible for its motion.
Solution. By definition, an object moving at constant speed in a circular path is undergoing uniform circular motion. Therefore, it experiences a centripetal acceleration of magnitude v2/r, always directed toward the center of the circle:

The force that produces the centripetal acceleration is given by Newton’s Second Law, coupled with the equation for centripetal acceleration:
This equation gives the magnitude of the force. As for the direction, recall that because F = ma, the directions of F and a are always the same. Since centripetal acceleration points toward the center of the circular path, so does the force that produces it. Therefore, it’s called centripetal force. The centripetal force acting on this object has a magnitude of Fc = mac = (5 kg)(18 m/s2) = 90 N.
Example 2 A 10.0 kg mass is attached to a string that has a breaking strength of 200 N. If the mass is whirled in a horizontal circle of radius 80 cm, what maximum speed can it have?
Solution. The first thing to do in problems like this is to identify what forces produce the centripetal acceleration. Notice that this is a horizontal circle. We can limit our examination to the horizontal (x) direction. Because gravity exerts a force in the y direction, it can be ignored. If we were given a problem with a vertical circle, we would have to include the effects of gravity, which will be demonstrated in Example 4. In this example, the tension in the string produces the centripetal force:
Notice the unit change from 80 cm to 0.80 m. As a general rule, stick to kg, m, and s because the newton is composed of these units.
Example 3 An athlete who weighs 800 N is running around a curve at a speed of 5.0 m/s in an arc whose radius of curvature, r, is 5.0 m. Find the centripetal force acting on him. What provides the centripetal force? What could happen to him if r were smaller?
Solution. Using the equation for the strength of the centripetal force, we find that

In this case, static friction provides the centripetal force. If the radius of curvature of the arc were smaller, then the centripetal force required to keep him running in a circle would increase. If the centripetal force increased enough, it might exceed what the force of static friction could provide, at which point he would slip.
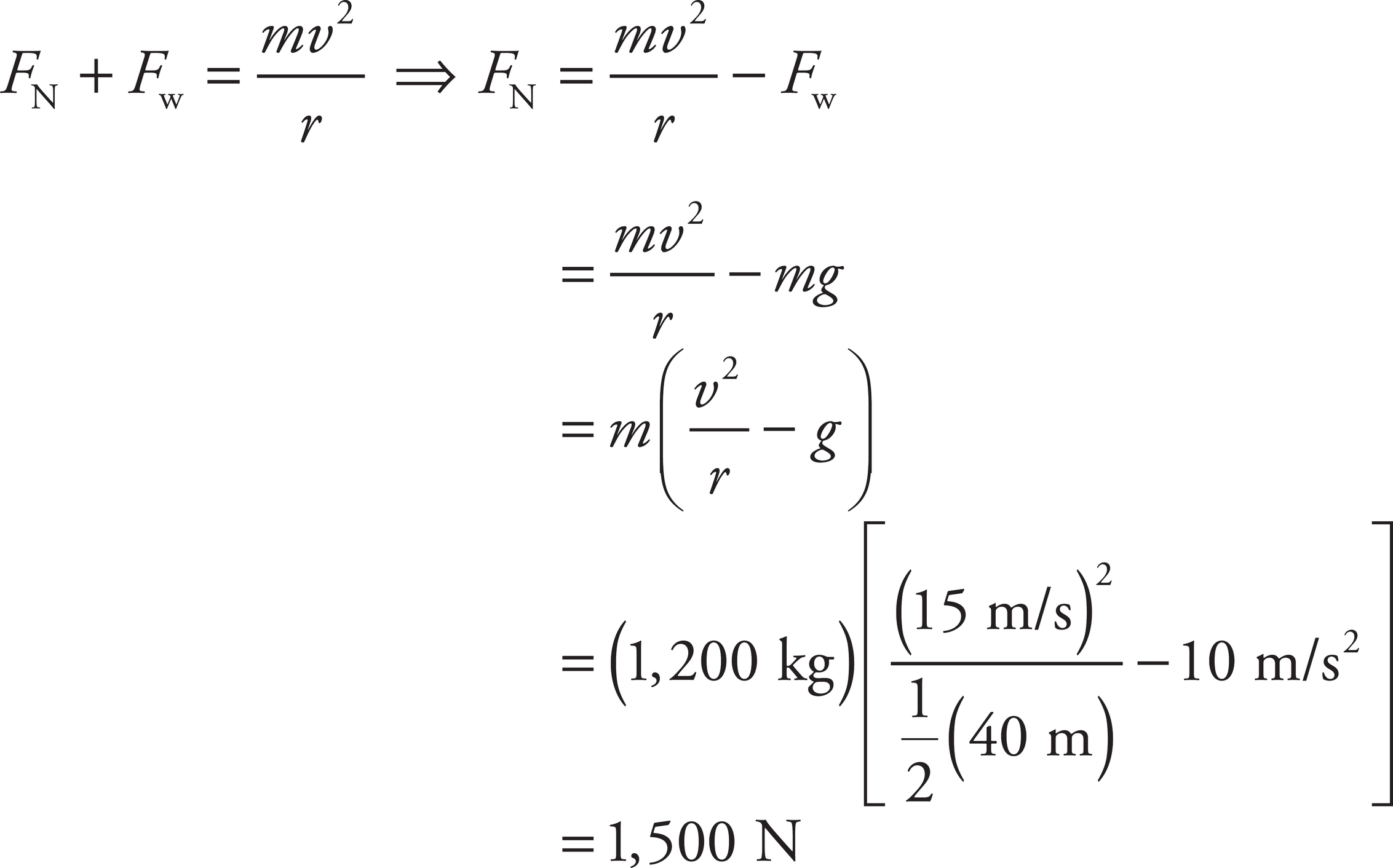
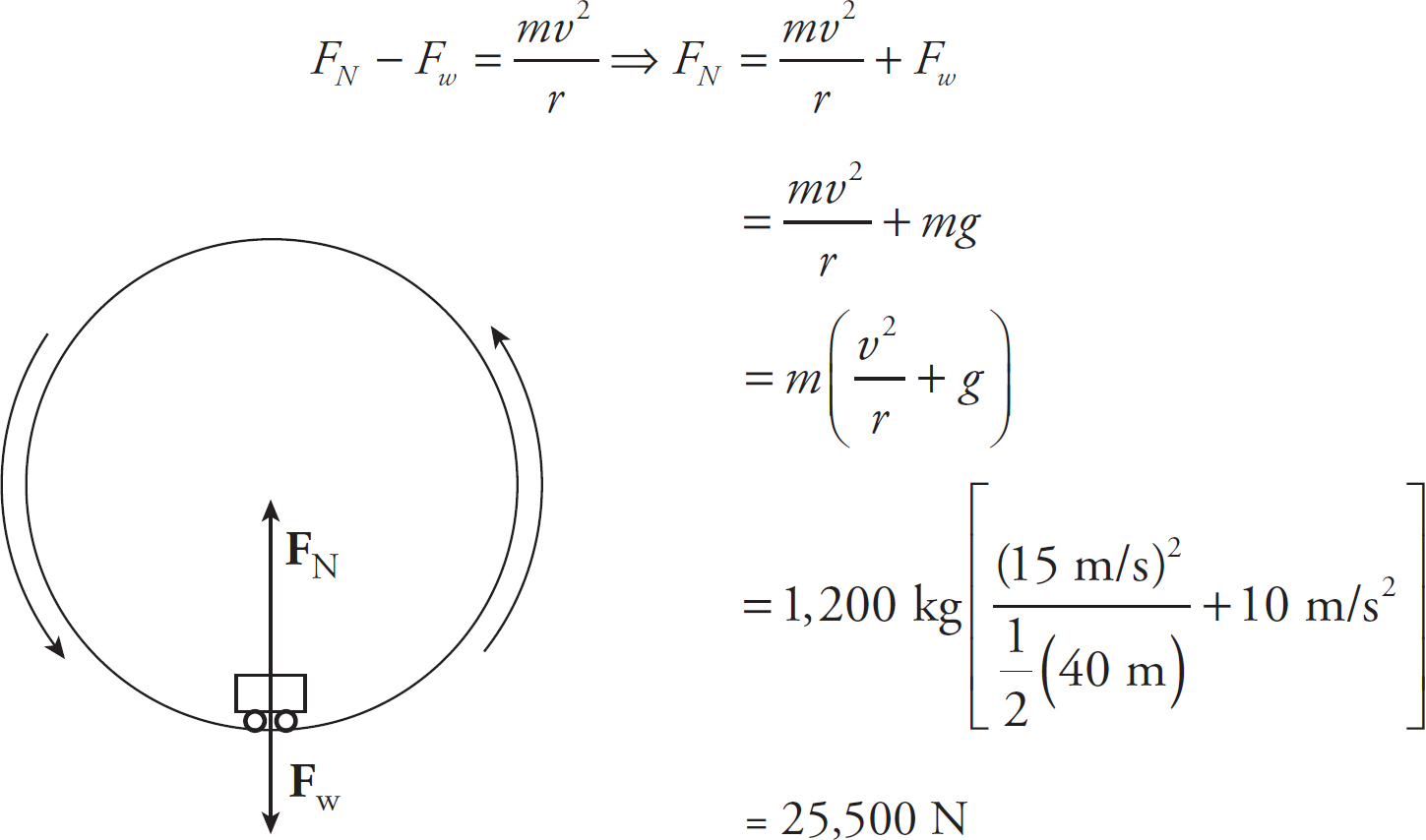
Example 4 A roller-coaster car enters the circular-loop portion of the ride. At the very top of the circle (where the people in the car are upside down), the speed of the car is 15 m/s, and the acceleration points straight down. If the diameter of the loop is 40 m and the total mass of the car (plus passengers) is 1,200 kg, find the magnitude of the normal force exerted by the track on the car at this point.
Solution. There are two forces acting on the car at its topmost point: the normal force exerted by the track and the gravitational force, both of which point downward. At the top of the loop, the gravitational force and the normal force point downwards. This is because the normal force acts perpendicular to the surface of the track, and the gravitational force is always directed downward.
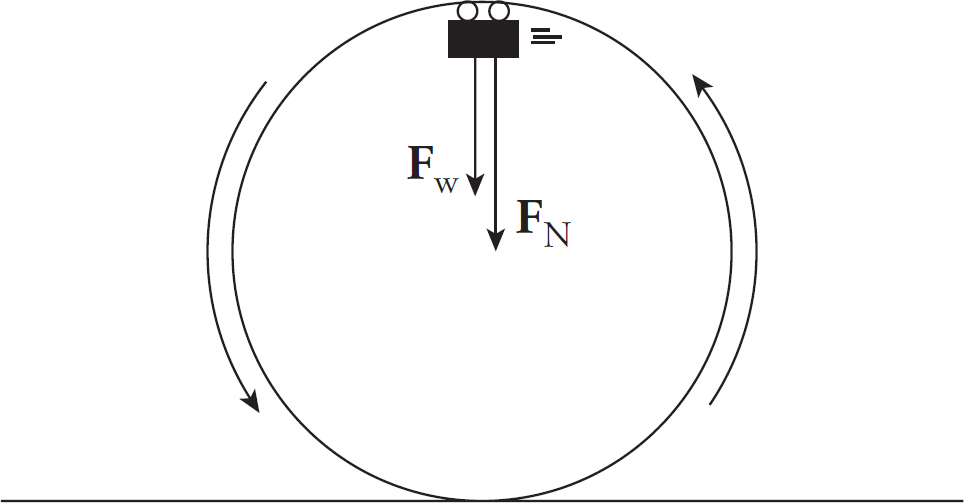
The combination of these two forces, FN + Fw, provides the centripetal force:
Example 5 In the previous example, if the net force on the car at its topmost point is straight down, why doesn’t the car fall straight down?
Solution. Remember that force tells an object how to accelerate. If the car had zero velocity at this point, then it would certainly fall straight down, but the car has a nonzero velocity (to the left) at this point. The fact that the acceleration is downward means that, at the next moment v will point down to the left at a slight angle, ensuring that the car remains on a circular path, in contact with the track.
Example 6 How would the normal force change in Example 4 if the car was at the bottom of the circle?
Solution. There are still two forces acting on the car: the gravitational force still points downward, but the normal force pushes 90 degrees to the surface (upward). These forces now oppose one another. The combination of these two forces still provides the centripetal force. Because the centripetal acceleration points inward, we will make anything that points toward the center of the circle positive and anything that points away from the circle negative. Therefore, our equation becomes
Notice the big difference between this answer and the answer from Example 4. This is why you would feel very little force between you and the seat at the top of the loop, but you would feel a big slam at the bottom of the loop.
Newton eventually formulated a law of gravitation: any two objects in the universe exert an attractive force on each other—called the gravitational force—whose strength is proportional to the product of the objects’ masses and inversely proportional to the square of the distance between them as measured from center to center. If we let G be the universal gravitational constant, then the strength of the gravitational force is given by the following equation:

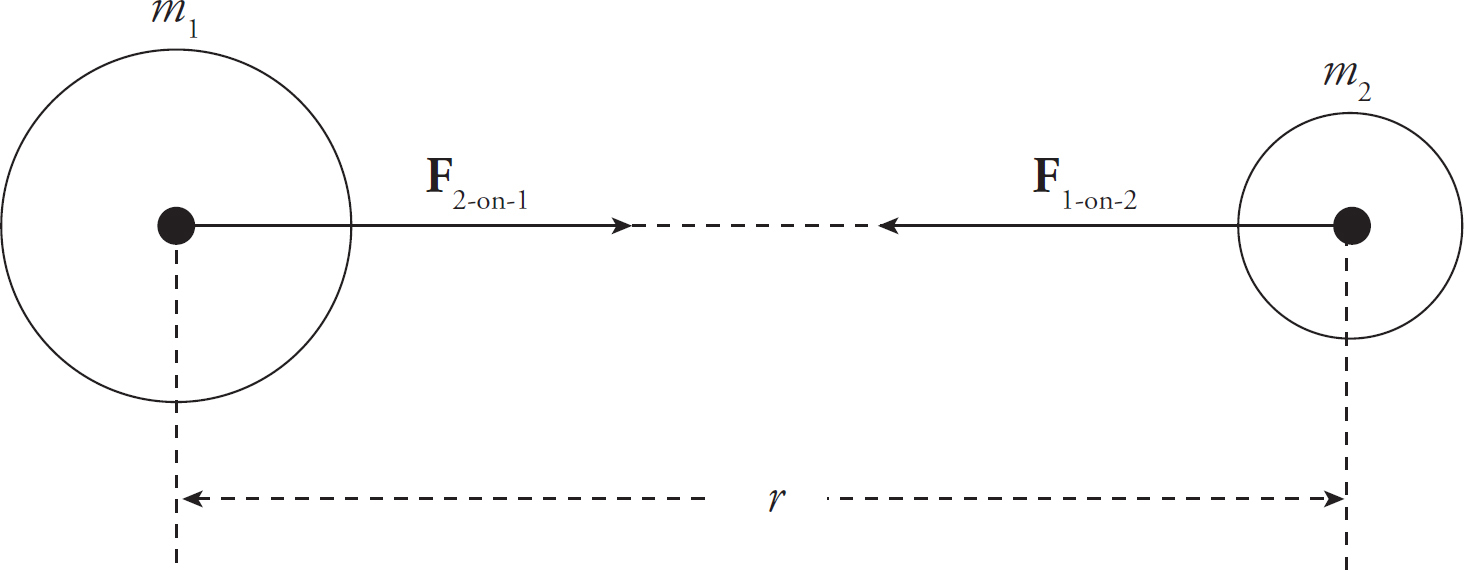
Gravity is always a pulling force.
The forces F1-on-2. and F2-on-1 act along the line that joins the bodies and form an action/reaction pair.
The first reasonably accurate numerical value for G was determined by Cavendish more than 100 years after Newton’s law was published. To two decimal places, the currently accepted value of G is
G = 6.67 × 10−11 N · m2/kg2
Why is gravity 9.8 m/s2? This constant is derived from this equation
g = Gm/r2
Using the mass of the Earth and the radius of the Earth, gravity comes out to be 9.8 m/s2.
Example 7 Given that the radius of the Earth is 6.37 × 106 m, determine the mass of the Earth.
Solution. Consider a small object of mass m near the surface of the Earth (mass M). Its weight is mg, but its weight is just the gravitational force it feels due to the Earth, which is GMm/R2. Therefore,

Since we know that g = 10 m/s2 and G = 6.67 × 10−11 N·m2/kg2, we can substitute to find

Example 8 We can derive the expression g = GM/R2 by equating mg and GMm/R2 (as we did in the previous example), and this gives the magnitude of the absolute gravitational acceleration, a quantity that’s sometimes denoted g0. The notation g is acceleration, but with the spinning of the Earth taken into account. Show that if an object is at the equator, its measured weight (that is, the weight that a scale would measure), mg, is less than its true weight, mg0, and compute the weight difference for a person of mass m = 60 kg.
Solution. Imagine looking down at the Earth from above the North Pole.
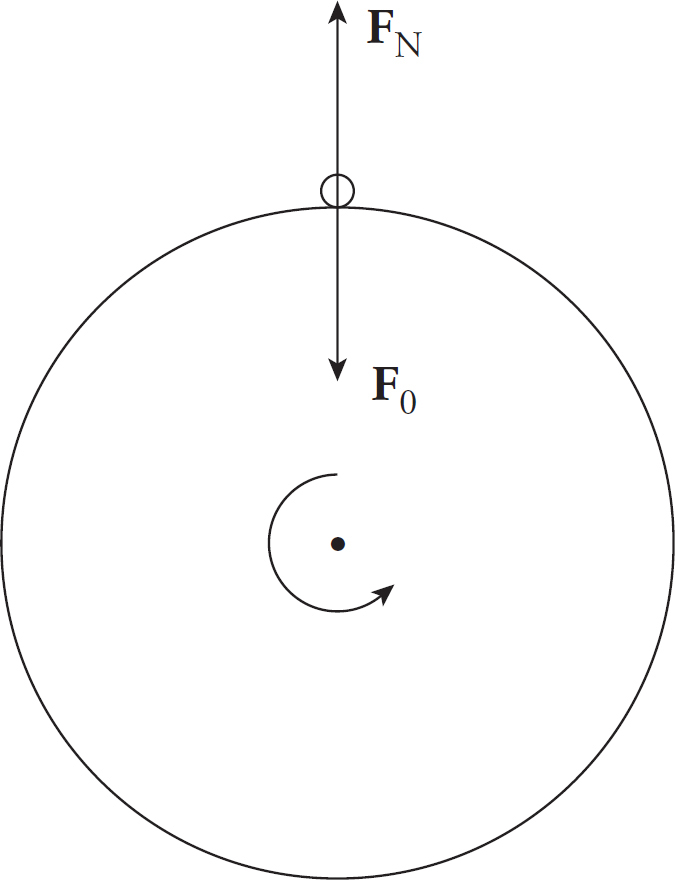
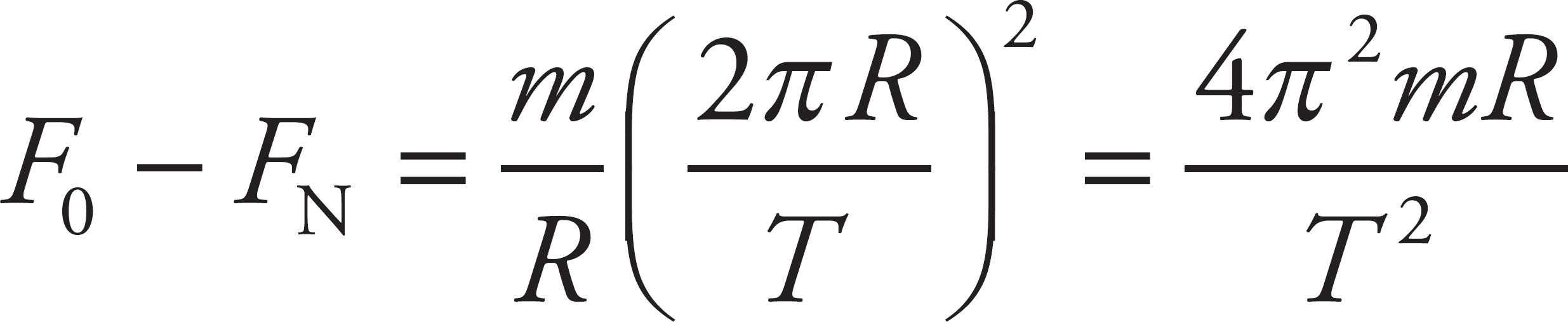
The net force toward the center of the Earth is F0 − FN, which provides the centripetal force on the object. Therefore,

Since v = 2πR/T, where T is the Earth’s rotation period, we have
or, since F0 = mg0 and FN = mg,
Since the quantity  is positive, mg must be less than mg0. The difference between mg0 and mg, for a person of mass m = 60 kg, is only
is positive, mg must be less than mg0. The difference between mg0 and mg, for a person of mass m = 60 kg, is only

and the difference between g0 and g is

Note that this difference is so small (< 0.3%) that it can usually be ignored.
Example 9 Communications satellites are often parked in geosynchronous orbits above Earth’s surface. These satellites have orbit periods that are equal to Earth’s rotation period, so they remain above the same position on Earth’s surface. Determine the altitude that a satellite must have to be in a geosynchronous orbit above a fixed point on Earth’s equator. (The mass of the Earth is 5.98 × 1024 kg.)
Solution. Let m be the mass of the satellite, M the mass of Earth, and R the distance from the center of Earth to the position of the satellite. The gravitational pull of Earth provides the centripetal force on the satellite, so

The orbit speed of the satellite is 2πR/T, so

which implies that

Now the key feature of a geosynchronous orbit is that its period matches Earth’s rotation period, T = 24 hr. Substituting the numerical values of G, M, and T into this expression, we find that

Therefore, if rE is the radius of Earth, then the satellite’s altitude above Earth’s surface must be
h = R − rE = (4.23 × 107 m) − (6.37 × 106 m) = 3.59 × 107 m
Example 10 The Moon orbits Earth in a (nearly) circular path at (nearly) constant speed. If M is the mass of Earth, m is the mass of the Moon, and r is the Moon’s orbit radius, find an expression for the Moon’s orbit speed.
Solution: We begin by answering the question, What produces the centripetal force? The answer is the gravitational pull by the Earth. We now simply translate our answer into an equation, like this:

Since we know Fgrav = GMm/r2, we get
Fgrav = Fc
G(Mm/r2) = m(v2/r)
G(M/r) = v2
v = (GM/r)(1/2)
Notice that the mass of the Moon, m, cancels out. So, any object orbiting at the same distance from the Earth as the Moon must move at the same speed as the Moon.
You may see a question or two about banking on your AP Physics 1 Exam. Banked curves are often employed by engineers in designing and constructing curved roads.
Banking allows for cars to travel around a curve at or below the posted speed limit, without relying on friction between the tires and road.
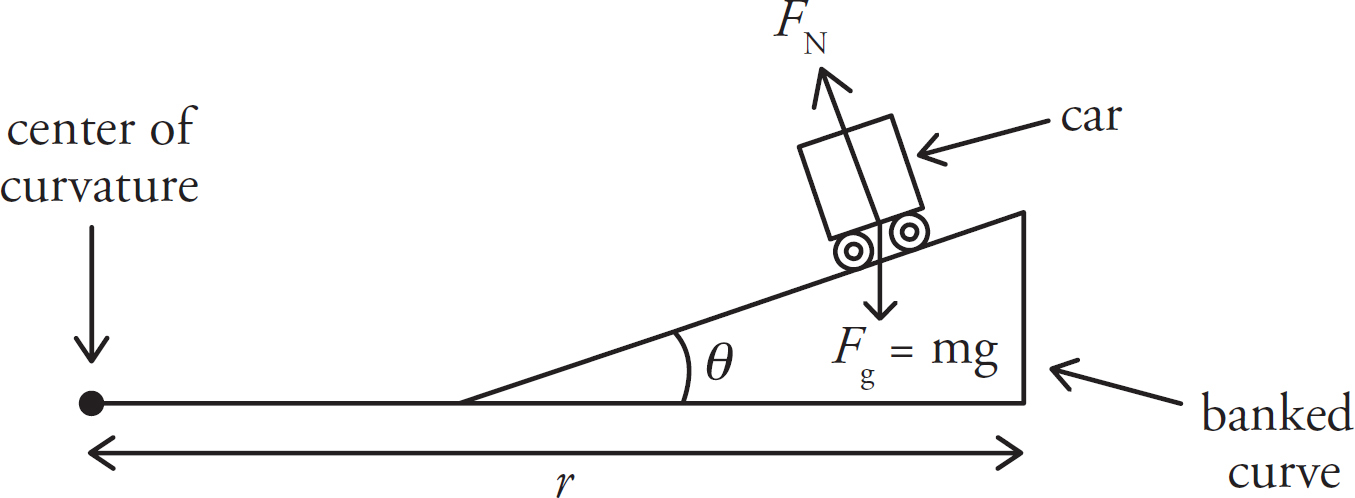
Example 11 Suppose that the radius of curvature, shown above is 60 m and the curve is banked at 11.8 degrees. What should the recommended speed be posted as?
Solution. The vertical component of the normal force must equal the downward force of gravity, mg. The horizontal component of the normal force is directed toward the center of curvature, producing the centripetal force that the car experiences as it rounds the curve. Thus,
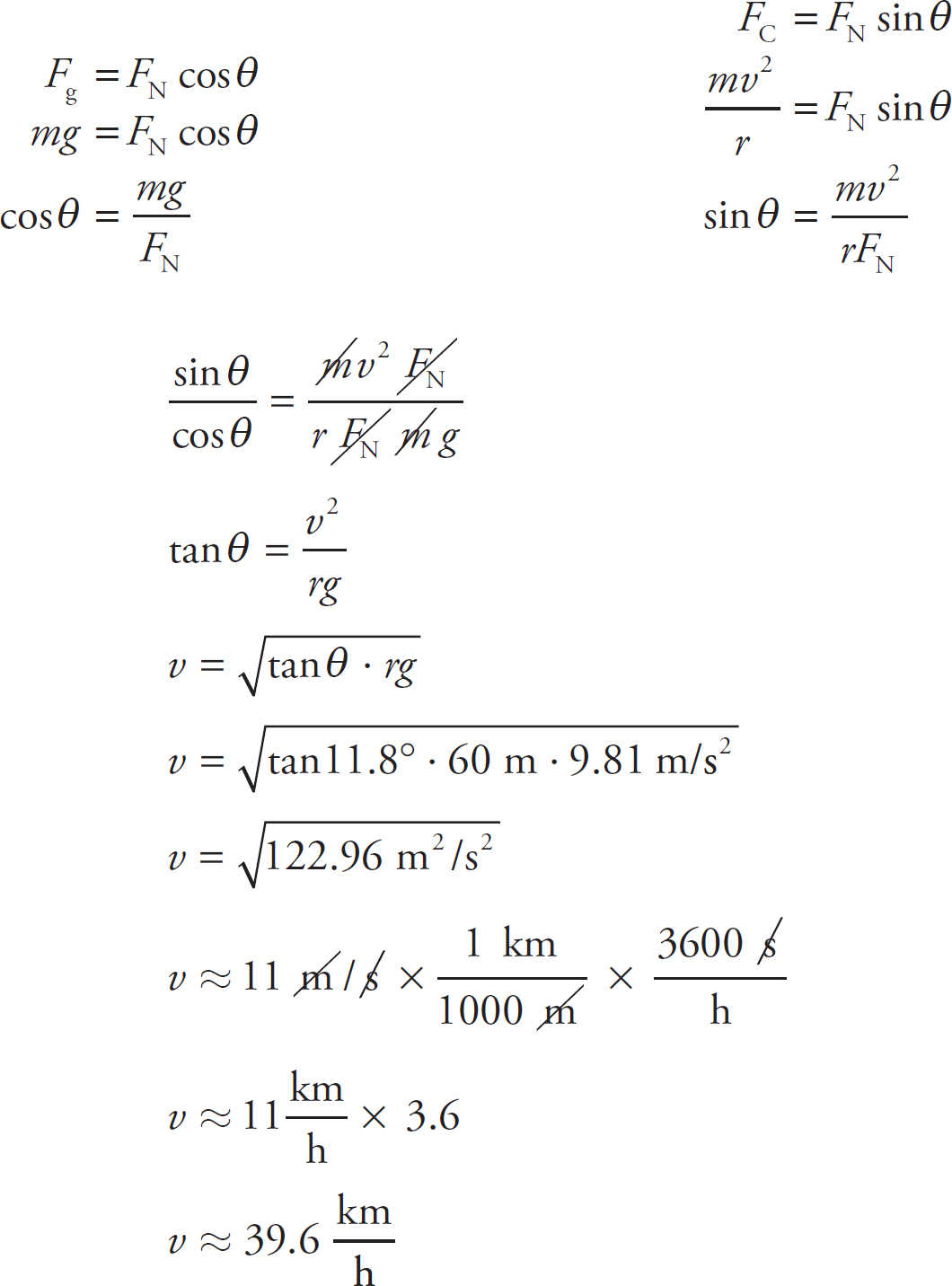
Therefore, the recommended speed should be posted as 40 km/hour.
Previously, we covered objects that undergo circular motion. The next part of this chapter focuses on taking those objects and spinning them. Previous equations involved objects moving in a linear orientation or being manipulated into circular orbit. With rotational motion, we will need to take on a new set of equations that are analogous to the physics of linear motion.
If we recall from before, an object’s mass measures its inertia—its resistance to acceleration. The greater the inertia on an object, the harder it is to change its velocity. Harder to change its velocity means the object is harder to deliver an acceleration on—which in turn means the greater the inertia, the greater the force that is required in order for an object to be moved. Comparing two objects, if Object 1 has greater inertia than Object 2 and the same force is applied on both objects, Object 1 will undergo a smaller acceleration.
In the linear model, we put these in terms of force, mass, acceleration, and velocity. When it comes to rotational kinematics, we need to change up a few of these terms:
|
Linear Kinematics |
Rotational Kinematics |
|
Force |
Torque (τ) |
|
Mass |
Moment of Inertia (I) |
|
Acceleration |
Angular Acceleration (α) |
|
Fnet = ma |
τnet = Iα |
|
Velocity |
Angular Velocity (ω) |
Like our linear equations, which are used to determine the distance (x), velocity (v), and linear acceleration, we use rotational equations to determine the same factors. In this section, we will go over angular distance (θ), angular velocity (ω), and angular acceleration (α). Finally, we will explore the relationship between these three rotational parameters and the linear parameters.
Let’s start with some basic definitions.
What is angular displacement?
What is translational displacement?
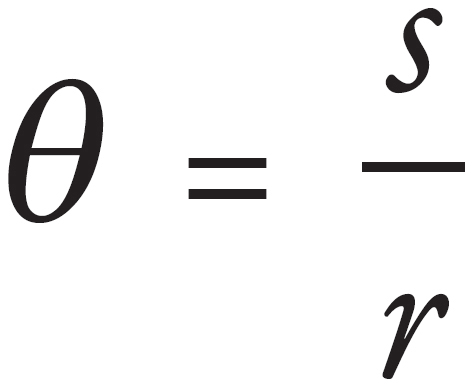
If you look at a circle, you can see that 1x around the circle (1 revolution) equals 2π radians, or 360°.
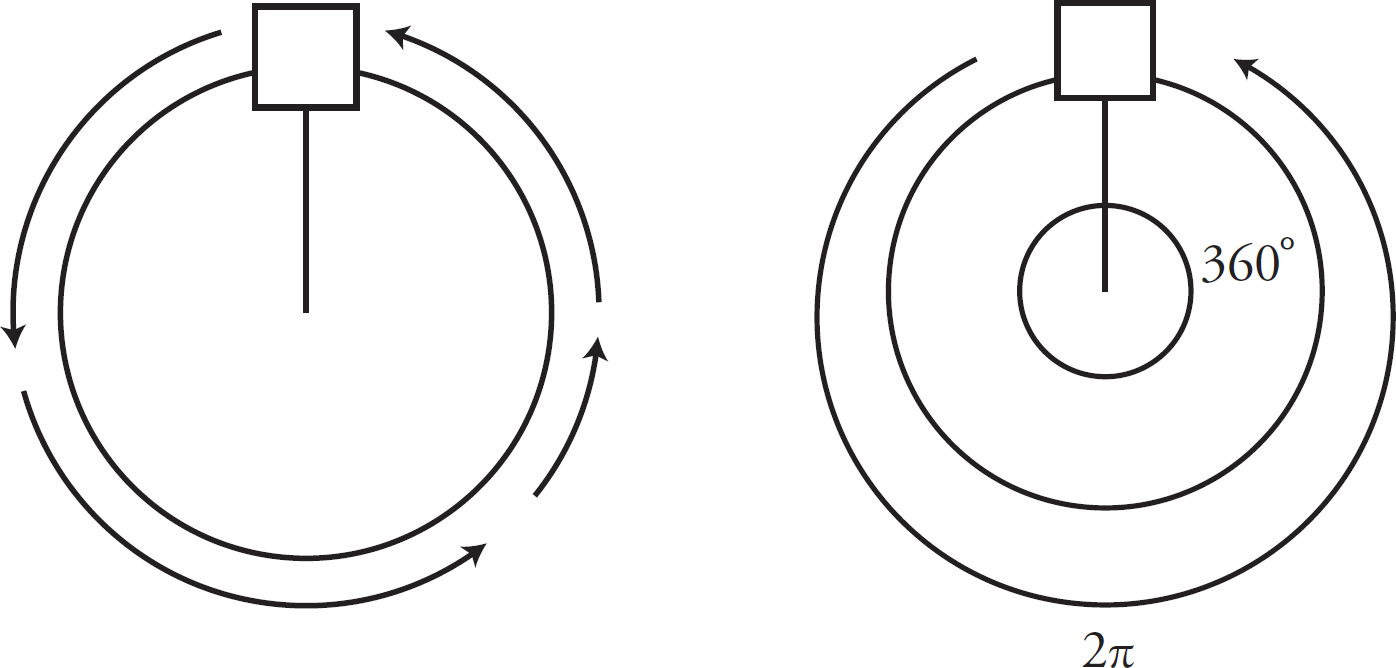
The linear position or physical distance traveled around the circle (Δs) can be related to angular position via this equation:
 )?
)?|
Angular Velocity |
Linear Velocity |
|
|
|
|
|
Units = m/s |
|
The angular velocity equals change in angular displacement divided by change in time. |
The linear velocity equals change in distance (Δx) divided by change in time. |
We can relate angular velocity to linear velocity via the following:

Note, just like  ,
,  has direction!
has direction!
The Right Hand Rule states that you must wrap your fingers around the object’s path. Let’s take the example of a toy car going around a circle.
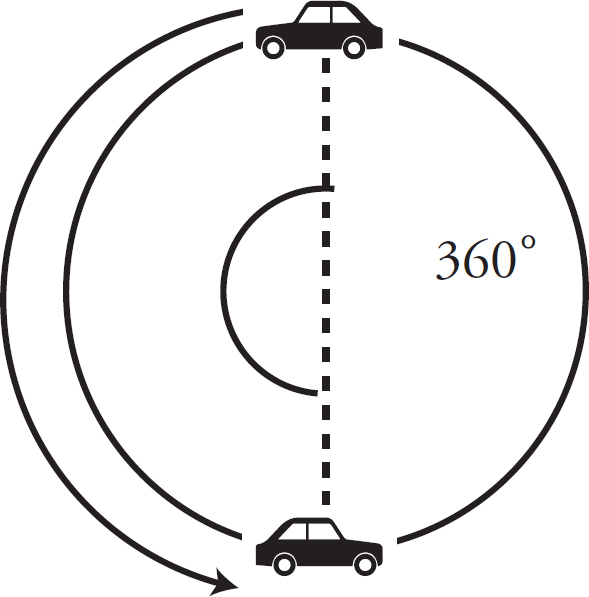
If you follow the car’s path, you will find your fingers are wrapping counterclockwise. Your thumb is the direction for angular velocity. In this case, it points out of the page. In physics we write the direction like this ⊙. If it were into the page, we would use this ⊗.
Angular acceleration, 
Units: radians/s2
Many of the rotational kinematics equations reflect linear kinematics equations.
|
Rotational Motion |
Linear Motion |
|
|
Big Five #1: |
Δθ = |
Δx = |
|
Big Five #2: |
ω = ω0 + αt |
v =v0 + at |
|
Big Five #3: |
θ = θ0 + ω0t + |
x = x0 + v0t + |
|
Big Five #4: |
θ = θ0 + ωt − |
x = x0 + vt− |
|
Big Five #5: |
ω2 = ω02 + 2α(θ−θ0) |
v2 = v02 + 2a (x − x0) |
Example 12 Four children climb on a carousel that is initially at rest. If the carousel accelerates to 0.4 radians per second within 10 seconds, what is the angular acceleration? What is its linear rotation 3 m from axis of rotation?
Solution.
ωi = 0
ω0 = 0.4 rad/s

Δθ
α = ?
T = 10 sec
To find linear acceleration: a = rα = (3 m)(0.04 rad/s2) = 0.12 m/s2
In the preceding chapters, objects were treated as though they were each a single particle. In many force-diagrams we have said that all the force is being delivered at a single point on the object. What makes this point the center of mass? And why do we associate all the force being delivered at this single point on the object?
Imagine a series of experiments. We walk into a large room with a hammer and a small light that we can attach to the hammer. In the first experiment, we hold the hammer and we attach a light to the very end of the hammer. Then we turn off the light and throw the hammer across the room. If we trace the path of the hammer, we notice that it gives a weird spiral-shaped path as follows:

Then we repeat the experiment. This time let’s attach the small light to the head of the hammer. Once again we turn off the light, throw the hammer across the room, and trace the path of the hammer. This time we notice that it follows another spiral-shaped path:
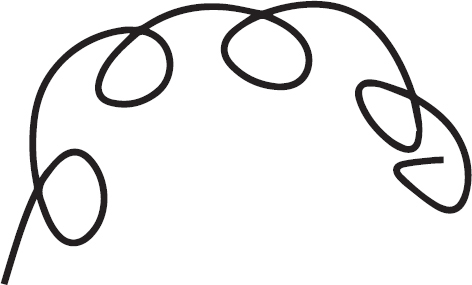
If we keep doing the experiment, after countless trials, you will notice that at a specific point, the hammer makes a parabolic path seen in the following drawing:
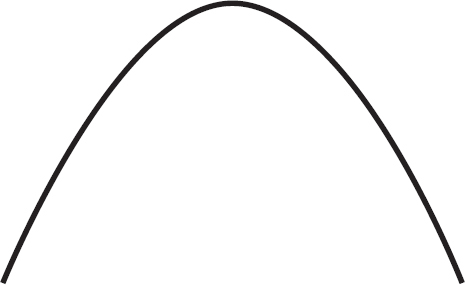
Apparently there was something important about that specific point. All the other points gave spiraled trajectories, but this one gave a smooth parabolic path. Upon further investigation, if we place that point on our fingers, we notice that the hammer balances nicely and is perfectly horizontal with the floor.
This certain point is the center of mass. Another way of looking at it is to say that the center of mass is the point at which we could consider all the mass of the object to be concentrated.
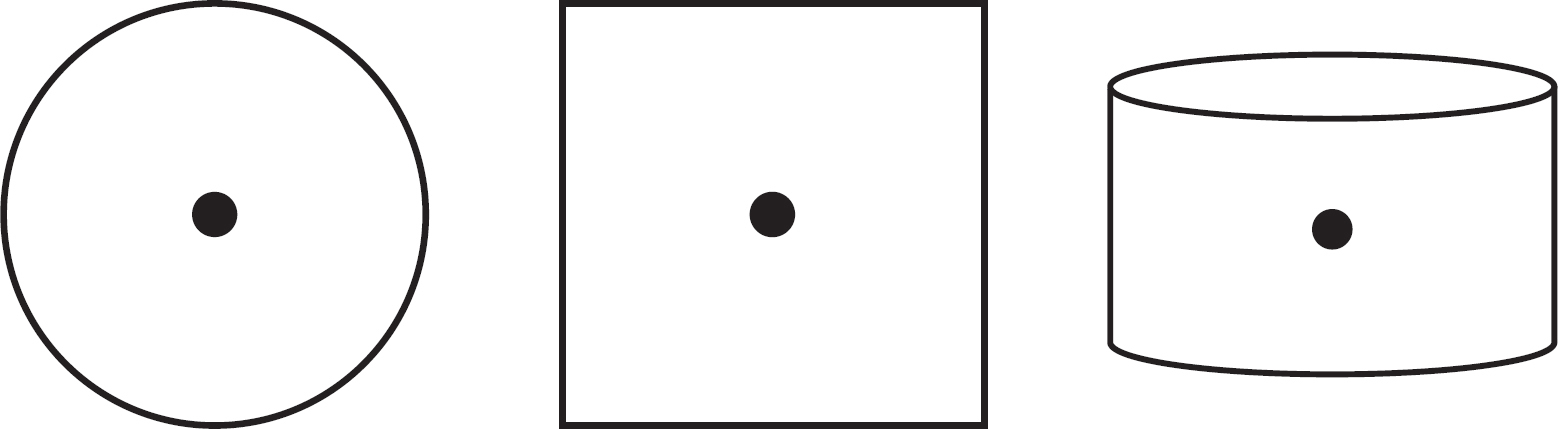
For a simple object such a sphere, block, or a cylinder, whose density is constant (a term in physics we call homogeneous), the center of mass is at its geometric center.
In some cases, the center of mass is not located on the body of the object:

The center of mass remains motionless while every other point undergoes circular motion around it. To locate the mass of a collection of objects, we must consider each individual mass and a central reference point:

x(c.m.) = (x1m1 + x2m2 + x3m3 +…+ xnmn) / (m1 + m2 + m3 +…+ mn)
The location of the center of mass is denoted as x(c.m.). In order to use this equation, we must follow a few steps:
Pick a convenient origin. We will call this our reference point (x = 0).
Determine the locations (x1, x2, x3,…, xn) of the objects.
Calculate the center of mass by using the formula above.
Keep in mind that the stick itself matters. If the stick itself has mass, we must take that mass into account and its center position will be where its center of mass is.
We can tie a ball to a string and make it undergo circular motion, but how would we make that ball itself spin? We could simply palm the ball and rotate our hand or we could put our hands on opposite sides of the ball and push one hand forward and the other backward. In both cases, in order to make an object’s center of mass accelerate, we need to exert a force. In order to make an object spin, we need to exert a torque.
Torque is the measure of a force’s effectiveness at making an object spin or rotate. (More precisely, it’s the measure of a force’s effectiveness at making an object accelerate rotationally.) If an object is initially at rest, and then it starts to spin, something must have exerted a torque. And if an object is already spinning, something would have to exert a torque to get it to stop spinning.
All systems that can spin or rotate have a “center” of turning. This is the point that does not move while the remainder of the object is rotating, effectively becoming the center of the circle. There are many terms used to describe this point, including pivot point and fulcrum.
Torque has always been a topic that students have difficulty understanding. So let’s go through a few examples and ask a few questions before we delve into torque:

The drawing above shows a door with its hinge (pivot point) located on the left side of the door. You can try some of these examples at home on a door in your house to get a better understanding. Let’s pose two different situations for trying to close the door:
SCENARIO 1

In Situation 1, the door will close the fastest because of the greater force used. Now in the same example, let’s say that a 100 N force is going to be applied to the door but at different angles:
SCENARIO 2
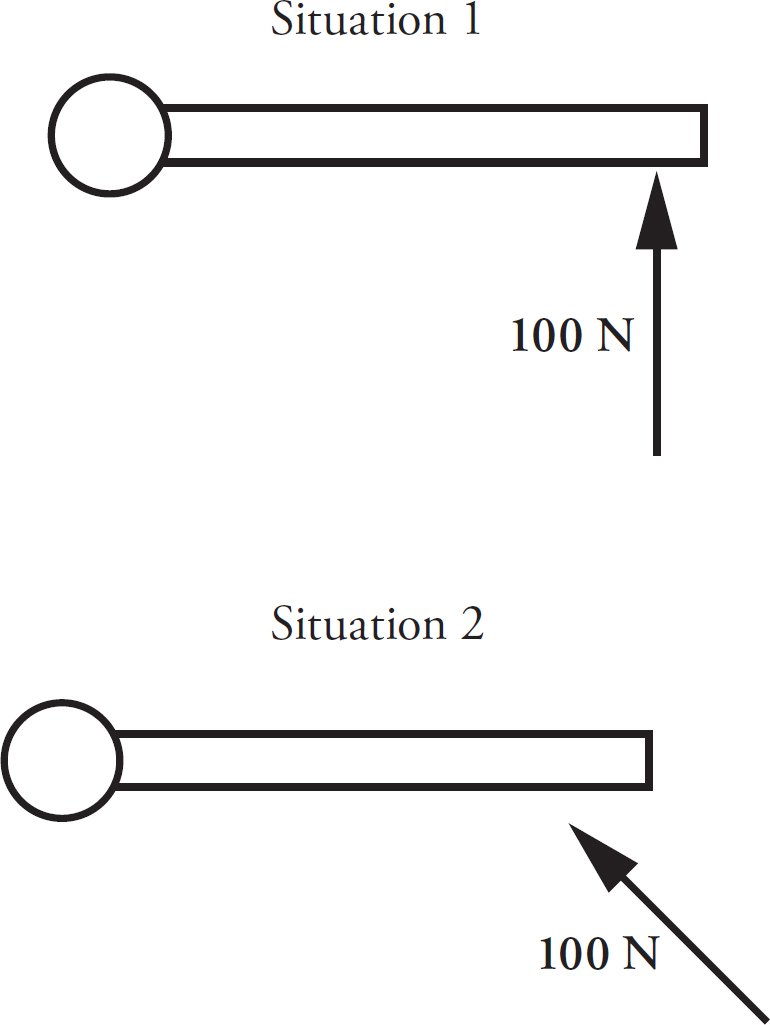

The door will close the fastest in Situation 1 and the second fastest in Situation 2. Situation 3 involves merely pushing on the door to no avail; the door will not close.
Now let’s use the same door example and apply the force to different parts of the door:
SCENARIO 3
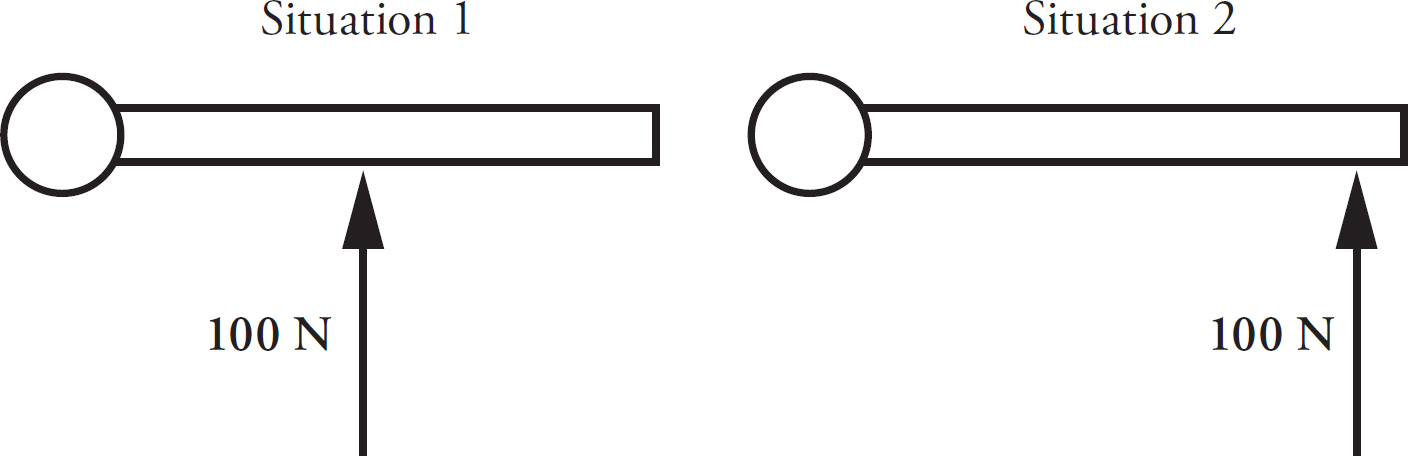
If you try this at home, you will notice that if you push the door as in Situation 2, it will be easier to close the door than if you tried to push the door as in Situation 1.
If you noticed in the three scenarios there were a few points that mattered when trying to close the door. In Scenario 1, the amount of force used to close the door mattered (magnitude of force). In Scenario 2, the angle in which we pushed the door mattered (angle). And in Scenario 3, the place in which we pushed mattered (radius).
Our force’s effectiveness at making something spin or rotate was determined by three factors:
the magnitude of force (F)
the angle (θ)
the radius (r)
These three factors give us our torque equation:
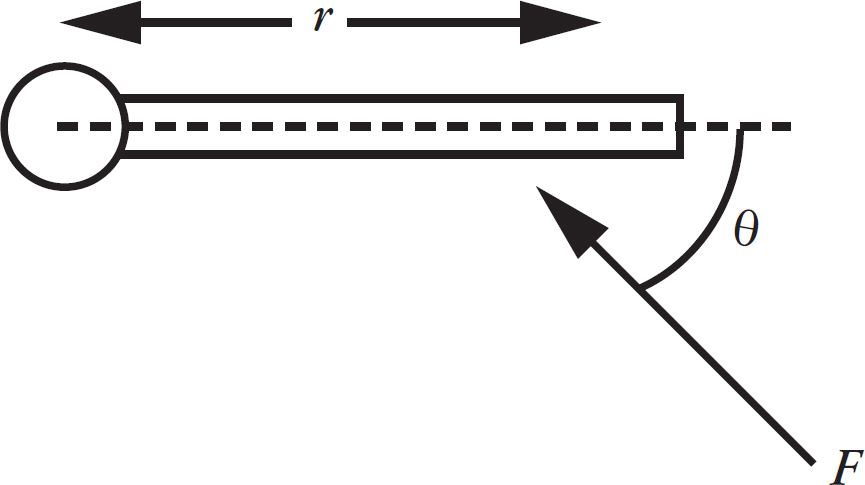
τ = rF sinθ
There’s no special name for this unit (torque): it’s just called a newton-meter. Because it is not in newtons, torque is NOT a force. (Torque is a measure of how much a force acting on an object causes that object to rotate.) In Scenario 2, Situation 3, a force was being applied straight on to the door directed straight into the pivot point. The magnitude of force did not suddenly disappear, but it was not effective at closing the door. Torque is the rotational equivalent of force in trying to make something accelerate rotationally.
Torque problems usually involve putting systems in equilibrium.
Example 13 A student pulls down with a force of 40 N on a rope that winds around a pulley of radius 5 cm.
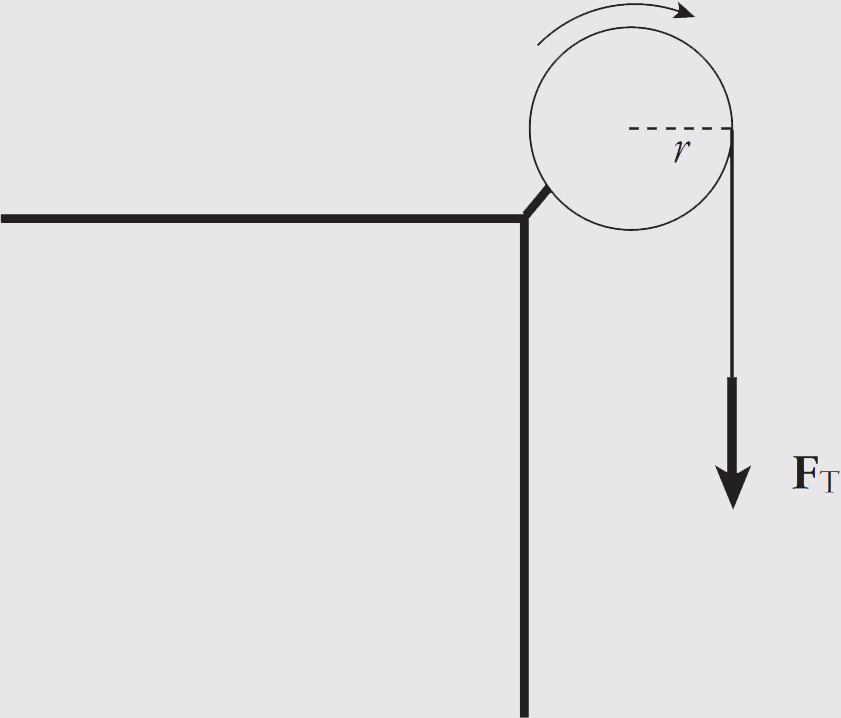
What’s the torque of this force?
Solution. Since the tension force, FT, is tangent to the pulley, it is perpendicular to the radius vector r at the point of contact:
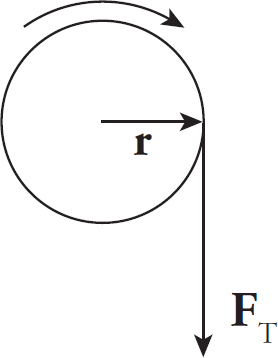
Therefore, the torque produced by this tension force is simply
τ = rFT = (0.05 m)(40 N) = 2 N·m
Example 14 What is the net torque on the cylinder shown below, which is pinned at the center?

Solution. Each of the two forces produces a torque, but these torques oppose each other. The torque of F1 is counterclockwise, and the torque of F2 is clockwise. This can be visualized by imagining the effect of each force, assuming that the other was absent.
The net torque is the sum of all the torques. Counting a counterclockwise torque as positive and a clockwise torque as negative, we have
τ1 = +r1F1 = +(0.12 m)(100 N) = +12 N·m
and
τ2 = −r2F2 = −(0.08 m)(80 N) = −6.4 N·m
so
τnet = Στ = τ1 + τ2 = (+12 N·m) + (−6.4 N·m) = +5.6 N·m
An object is said to be in translational equilibrium if the sum of the forces acting on it is zero—that is, if Fnet = 0. Similarly, an object is said to be in rotational equilibrium if the sum of the torques acting on it is zero—that is, if τnet = 0. The term equilibrium by itself means both translational and rotational equilibrium. A body in equilibrium may be in motion; Fnet = 0 does not mean that the velocity is zero; it only means that the velocity is constant. Similarly, τnet = 0 does not mean that the angular velocity is zero; it only means that it’s constant. If an object is at rest, then it is said to be in static equilibrium.
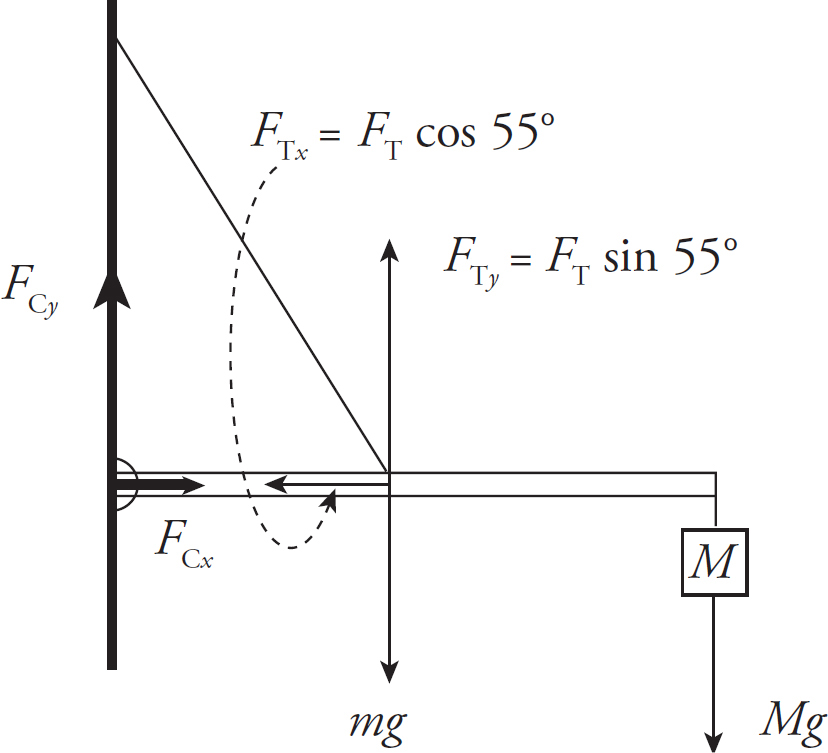
Example 15 A uniform bar of mass m and length L extends horizontally from a wall. A supporting wire connects the wall to the bar’s midpoint, making an angle of 55° with the bar. A sign of mass M hangs from the end of the bar.
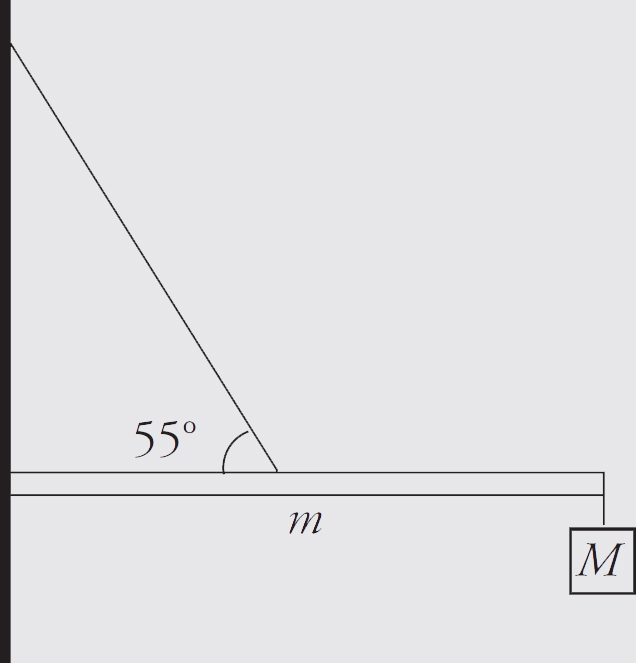
If the system is in static equilibrium and the wall has friction, determine the tension in the wire and the strength of the force exerted on the bar by the wall if m = 8 kg and M = 12 kg.
Solution. Let FC denote the (contact) force exerted by the wall on the bar. In order to simplify our work, we can write FC in terms of its horizontal component, FCx, and its vertical component, FCy. Also, if FT is the tension in the wire, then FTx = FT cos 55° and FTy = FT sin 55° are its components. This gives us the following force diagram:
The first condition for equilibrium requires that the sum of the horizontal forces is zero and the sum of the vertical forces is zero:

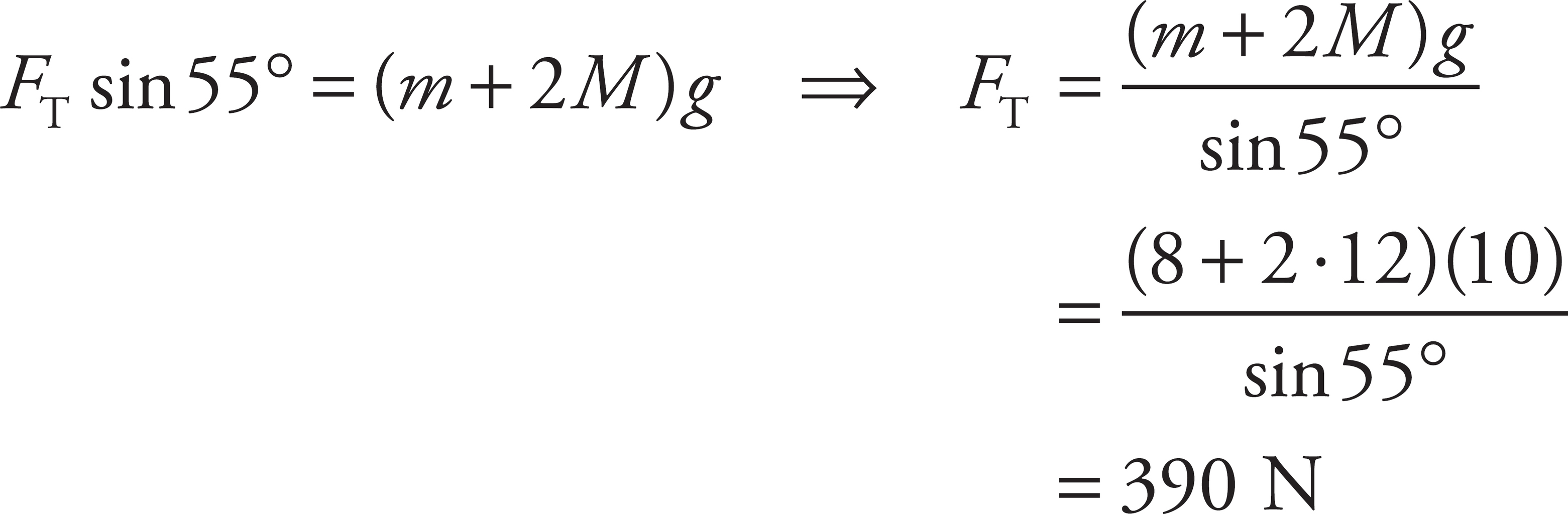
We notice immediately that we have more unknowns (FCx, FCy, FT) than equations, so this system cannot be solved as is. The second condition for equilibrium requires that the sum of the torques about any point is equal to zero. Choosing the contact point between the bar and the wall as our pivot, only three of the forces in the diagram above produce torque: FTy produces a counterclockwise torque, and both mg and Mg produce clockwise torques, and the sum of the three torques must equal zero. From the definition τ = rF sin θ, and taking counterclockwise torque as positive and clockwise torque as negative, we have

Note that you can divide out the r term here, so r will not factor into the final equation. The above equation contains only one unknown and can be solved immediately:

Since FTy = FT sin 55°, we can find that
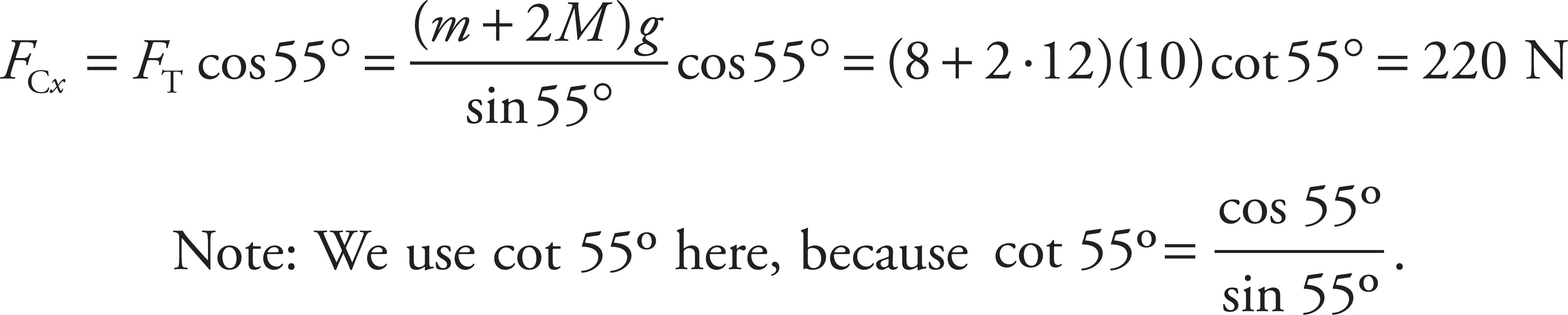
Substituting this result into Equation (1) gives us FCx:
And finally, from Equation (2), we get
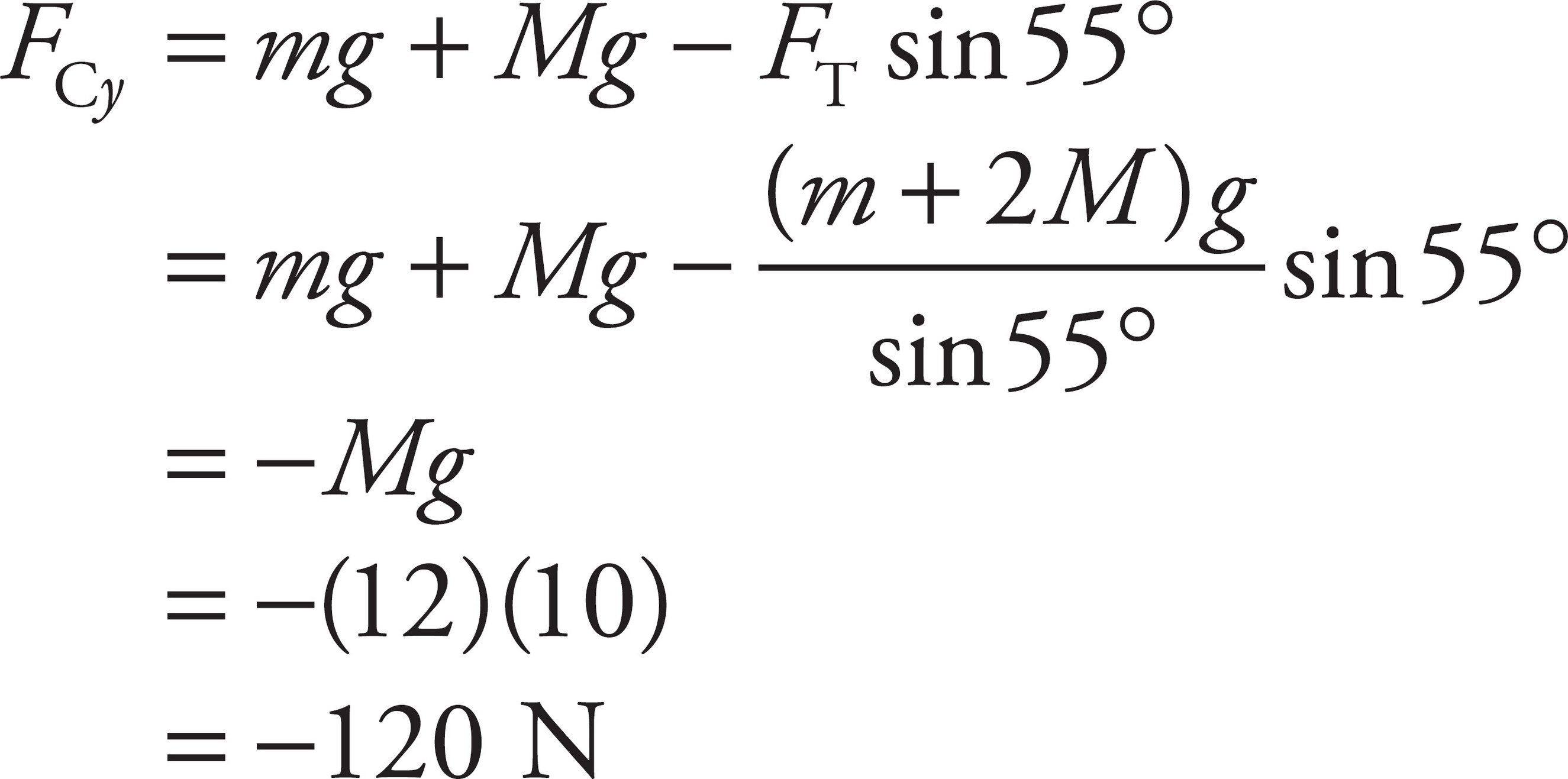
The fact that FCy turned out to be negative simply means that in our original force diagram, the vector FCy points in the direction opposite to how we drew it. That is, FCy points downward. Therefore, the magnitude of the total force exerted by the wall on the bar is

Now that we’ve studied torque and rotation, we can finally put together the pieces of making an object spin. An object’s rotational inertia (also known as the moment of inertia) is defined as the tendency of an object in motion to rotate until acted upon by an outside force. Think of mass as translational inertia, since it measures an object’s resistance to translational acceleration, given by a in F = ma. Then, just as translational inertia tells us how resistant an object is to translation acceleration, an object’s rotational inertia, I, tells us how resistant the object is to rotational acceleration.
Rotational acceleration or angular acceleration is the same as translational acceleration except we are taking a ball at rest and speeding up its angular velocity. In order to achieve this acceleration, a force is required. In terms of rotational inertia, torque is required to produce rotational acceleration. We need to apply a force that is effective in generating acceleration. Torque, in terms of rotational inertia, is
τ = Iα
This equation makes some key relationships. The larger the rotational inertia (moment of inertia) is, the smaller the value will be for a given torque on an object. If Object 1 has a greater rotational inertia than Object 2, then it will be more difficult to rotate Object 1 than Object 2. More precisely, a greater torque will be required to give Object 1 the same rotational acceleration as Object 2, or, equivalently, if the same torque is applied to both objects, Object 1 will undergo a smaller rotational acceleration.
So, how do we find the rotational inertia of an object? It depends on the object’s mass, but there is more to it than that. Two objects can have the same mass but different rotational inertias. Rotational inertia is also dependent on how the mass is distributed in an object with respect to the axis that it rotated around.
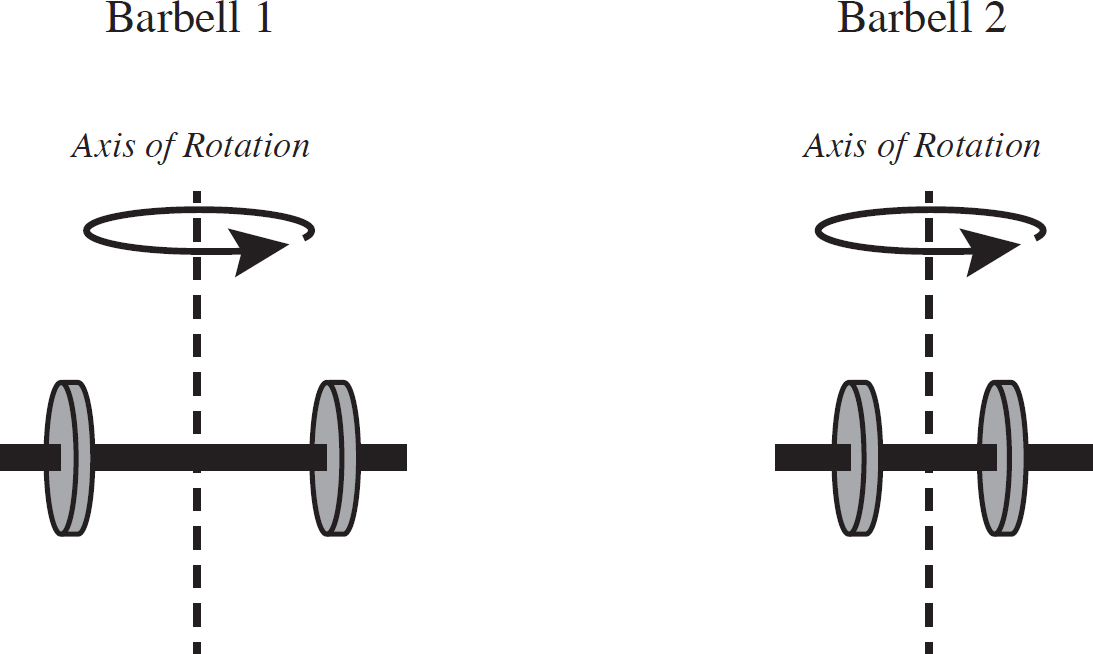
The farther away the mass is from the axis of rotation, the greater the rotational inertia will be.
Imagine a barbell with a weight near each end and an identical barbell with the weights pushed near the middle of the bar. These two barbells have the same mass, but their rotational inertias are different. Notice that the first barbell has its attached masses farther away from the axis of rotation than the second one. If we wanted to rotate each bar around its midpoint, we would find it more difficult to rotate the first barbell than the second one. As a result, we would find it more difficult to rotate the first barbell than the second one. The first barbell has a greater value of I.
The same way that objects moving in a straight line have linear momentum, objects experiencing rotation have angular momentum. Angular momentum is a vector quantity denoted by L. Similar to the other rotational vectors we’ve covered so far, angular momentum has only two possible directions: clockwise and counterclockwise. Furthermore, if you remember what we learned about linear momentum back in Chapter 7, then understanding its rotational counterpart is pretty straightforward. All you have to do is replace the linear terms in the equations you already know with their analogous rotational terms.
For example, linear momentum is defined as the product of mass and velocity, and angular momentum is given by the following equation:
L = Iω
which shows angular momentum is the product of the rotational inertia and angular velocity.
Additionally, we previously defined the change in linear momentum as the product of force and the change in time. A similar equation exists for finding the change in angular momentum:
ΔL = τΔt
Finally, in addition to the above equations, it’s important to know that, just like linear momentum, angular momentum is conserved for any isolated system.
Example 16 A man is standing halfway between the center and one edge of a rotating plank. If he wants to slow down the rotational speed, should he walk toward the center or the edge?
Solution. Because this is an isolated system, we know angular momentum will be conserved. Since L = Iω, that means our desired decrease to rotational velocity can be achieved by increasing the rotational inertia. Earlier, we learned that rotational inertia is greater when the mass is farther from the axis of rotation. In this case, that means the man should walk toward the edge.
Answers and explanations can be found in Chapter 13.
1. An object moves at constant speed in a circular path. Which of the following statements are true? Select two answers.
(A) The velocity is changing.
(B) The velocity is constant.
(C) The magnitude of acceleration is constant.
(D) The magnitude of acceleration is changing.
Questions 2–3 refer to the situation below.
A 60 cm rope is tied to the handle of a bucket which is then whirled in a vertical circle. The mass of the bucket is 3 kg.
2. At the lowest point in its path, the tension in the rope is 50 N. What is the speed of the bucket?
(A) 1 m/s
(B) 2 m/s
(C) 3 m/s
(D) 4 m/s
3. What is the critical speed below which the rope would become slack when the bucket reaches the highest point in the circle?
(A) 0.6 m/s
(B) 1.8 m/s
(C) 2.4 m/s
(D) 4.8 m/s
4. An object moves at a constant speed in a circular path of radius r at a rate of 1 revolution per second. What is its acceleration?
(A) 0
(B) 2π2r
(C) 2π2r2
(D) 4π2r
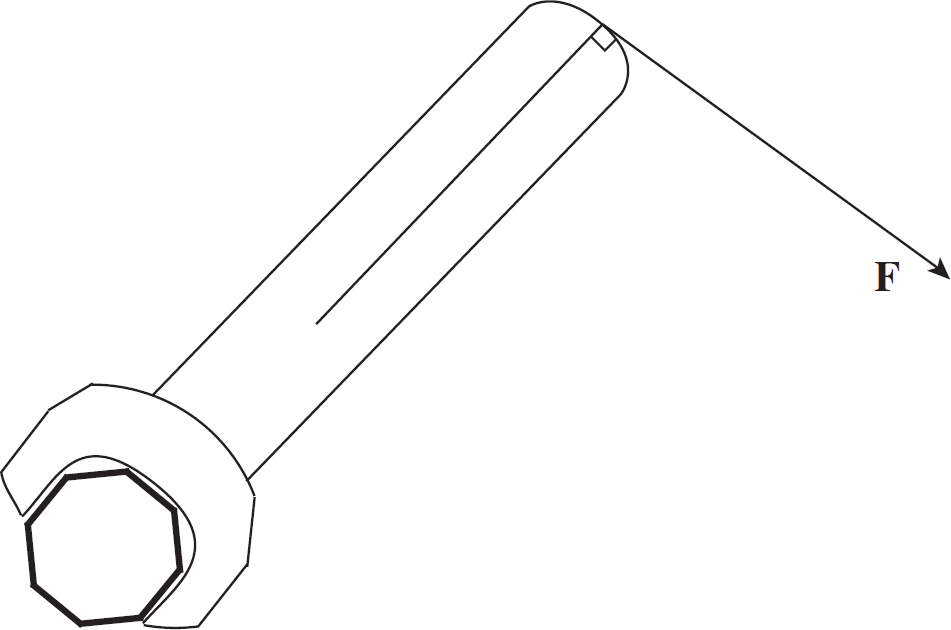
5. In an effort to tighten a bolt, a force F is applied as shown in the figure above. If the distance from the end of the wrench to the center of the bolt is 20 cm and F = 20 N, what is the magnitude of the torque produced by F ?
(A) 1 N·m
(B) 2 N·m
(C) 4 N·m
(D) 10 N·m
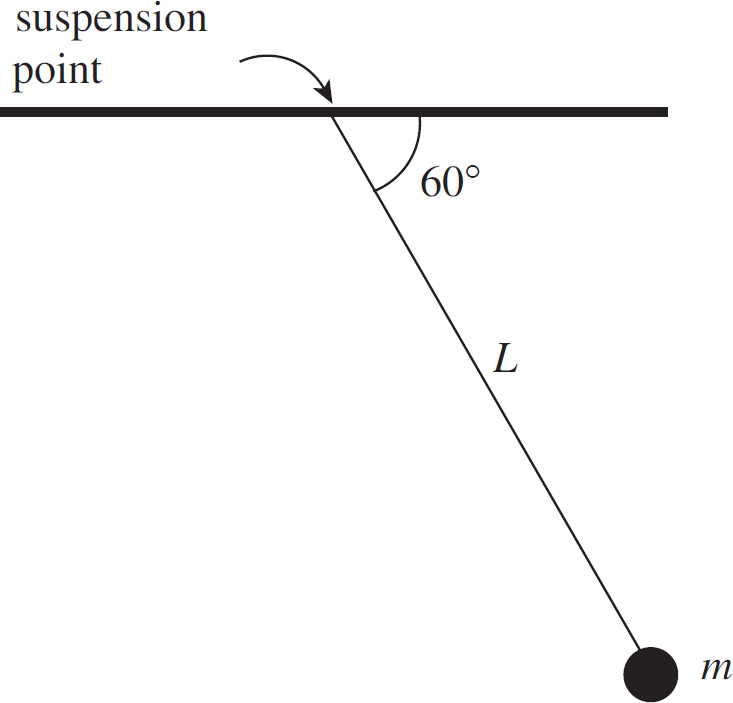
6. In the figure above, what is the torque about the pendulum’s suspension point produced by the weight of the bob, given that the length of the pendulum, L, is 80 cm and m = 0.50 kg ?
(A) 0.5 N·m
(B) 1.0 N·m
(C) 1.7 N·m
(D) 2.0 N·m

7. A uniform meter stick of mass 1 kg is hanging from a thread attached at the stick’s midpoint. One block of mass m = 3 kg hangs from the left end of the stick, and another block, of unknown mass M, hangs below the 80 cm mark on the meter stick. If the stick remains at rest in the horizontal position shown above, what is M ?
(A) 4 kg
(B) 5 kg
(C) 6 kg
(D) 8 kg
8. If the distance between two point particles is doubled, then the gravitational force between them
(A) decreases by a factor of 4
(B) decreases by a factor of 2
(C) increases by a factor of 2
(D) increases by a factor of 4
9. At the surface of Earth, an object of mass m has weight w. If this object is transported to an altitude that is twice the radius of Earth, then at the new location,
(A) its mass is m and its weight is w/2
(B) its mass is m/2 and its weight is w/4
(C) its mass is m and its weight is w/4
(D) its mass is m and its weight is w/9
10. A moon of mass m orbits a planet of mass 100m. Let the strength of the gravitational force exerted by the planet on the moon be denoted by F1, and let the strength of the gravitational force exerted by the moon on the planet be F2. Which of the following is true?
(A) F1 = 100F2
(B) F1 = 10F2
(C) F1 = F2
(D) F2 = 10F1
11. The dwarf planet Pluto has 1/500 the mass and 1/15 the radius of Earth. What is the value of g (in m/s2) on the surface of Pluto?
(A) 
(B) 
(C) 
(D) 
12. A satellite is currently orbiting Earth in a circular orbit of radius R; its kinetic energy is K1. If the satellite is moved and enters a new circular orbit of radius 2R, what will be its kinetic energy?
(A) 
(B) 
(C) 2K1
(D) 4K1
13. A moon of Jupiter has a nearly circular orbit of radius R and an orbit period of T. Which of the following expressions gives the mass of Jupiter?
(A) 
(B) 
(C) 
(D) 
14. Two large bodies, Body A of mass m and Body B of mass 4m, are separated by a distance R. At what distance from Body A, along the line joining the bodies, would the gravitational force on an object be equal to zero? (Ignore the presence of any other bodies.)
(A) 
(B) 
(C) 
(D) 
15. You are looking at a top view of a planet orbiting the Sun in a clockwise direction. Which of the following would describe the velocity, acceleration, and force acting on the planet due to the Sun’s pull at point P ?
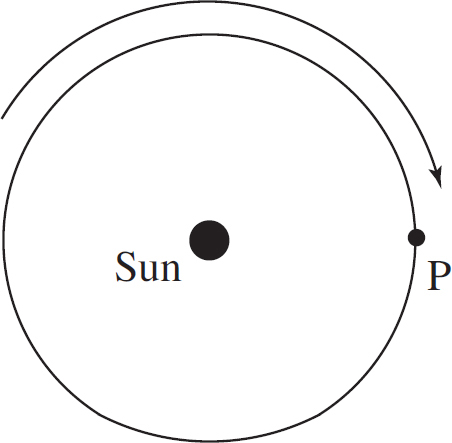
(A) v ↓ a ↑ F ↑
(B) v ↓ a ← F ←
(C) v ↓ a → F →
(D) v ↑ a ← F ←
16. Which of the following statements are true for a satellite in outer space orbiting the Earth in uniform circular motion? Select two answers.
(A) There are no forces acting on the satellite.
(B) The force of gravity is the only force acting on the satellite.
(C) The force of gravity is balanced by outward force of the object.
(D) The mass of the satellite has no effect on the orbital speed.
17. An object of mass m is traveling at constant speed v in a circular path of radius r. How much work is done by the centripetal force during one-half of a revolution?
(A) πmv2
(B) 0
(C) πmv2r
(D) 2πmv2r
1. A robot probe lands on a new, uncharted planet. It has determined the diameter of the planet to be 8 × 106 m. It weighs a standard 1 kg mass and determines that 1 kg weighs only 5 newtons on this new planet.
(a) What must the mass of the planet be?
(b) What is the acceleration due to gravity on this planet? Express your answer in both m/s2 and g’s (where 1 g = 10 m/s2).
(c) What is the average density of this planet?
2. The Earth has a mass of 6 × 1024 kg and orbits the Sun in 3.15 × 107 seconds at a constant radius of 1.5 × 1011 m.
(a) What is the Earth’s centripetal acceleration around the Sun?
(b) What is the gravitational force acting between the Sun and Earth?
(c) What is the mass of the Sun?
3. An amusement park ride consists of a large cylinder that rotates around its central axis as the passengers stand against the inner wall of the cylinder. Once the passengers are moving at a certain speed, v, the floor on which they are standing is lowered. Each passenger feels pinned against the wall of the cylinder as it rotates. Let r be the inner radius of the cylinder.
(a) Draw and label all the forces acting on a passenger of mass m as the cylinder rotates with the floor lowered.
(b) Describe what conditions must hold to keep the passengers from sliding down the wall of the cylinder.
(c) Compare the conditions discussed in part (b) for an adult passenger of mass m and a child passenger of mass m/2.
4. A curved section of a highway has a radius of curvature of r. The coefficient of friction between standard automobile tires and the surface of the highway is µs.
(a) Draw and label all the forces acting on a car of mass m traveling along this curved part of the highway.
(b) Compute the maximum speed with which a car of mass m could make it around the turn without skidding in terms of μs, r, g, and m.
City engineers are planning to bank this curved section of highway at an angle of θ to the horizontal.
(c) Draw and label all of the forces acting on a car of mass m traveling along this banked turn. Do not include friction.
(d) The engineers want to be sure that a car of mass m traveling at a constant speed v (the posted speed limit) could make it safely around the banked turn even if the road were covered with ice (that is, essentially frictionless). Compute this banking angle θ in terms of r, v, g, and m.
For objects undergoing uniform circular motion, the centripetal acceleration is given by  and the centripetal force is given by
and the centripetal force is given by  .
.
Torque is a property of a force that makes an object rotate. The equation for torque is τ = rF sin θ. Torques may be clockwise or counterclockwise. An object is in equilibrium if  ,
,  , and
, and  .
.
For any two masses in the universe, there is a gravitational attraction given by

The acceleration due to gravity on any planet is given by

Many times universal gravitation is linked up with circular motion (because planetary orbits are very nearly circular). Therefore, it is useful to keep the following equations for circular motion mentally linked for those questions that include orbits:

Any isolated system will have its angular momentum conserved. This is given by the following equation:
L = Iω
If outside forces affect the system, then the change to an object’s angular momentum can be calculated by this equation:
ΔL = τΔt