This may suffice to make the relation between the inversion problem and the theory of multiplicative functions and differentials clear. Abel himself proved only that part of the theorem above named for him which states that if ![]() are the zeros and
are the zeros and ![]() are the poles of a meromorphic function, then the congruences (18.2) hold. But he proved this part in a sharper form, with congruence modulo G0 replaced by congruence modulo G.26 Thus with the inversion already proved, one obtains the following.
are the poles of a meromorphic function, then the congruences (18.2) hold. But he proved this part in a sharper form, with congruence modulo G0 replaced by congruence modulo G.26 Thus with the inversion already proved, one obtains the following.
Abel’s Theorem (second version). The points ![]() ;
;![]() are the sets of zeros and poles, respectively, of a meromorphic function if and only if, for a suitable choice (independent of w) of the paths from
are the sets of zeros and poles, respectively, of a meromorphic function if and only if, for a suitable choice (independent of w) of the paths from ![]() to the points
to the points ![]() and
and ![]() , every Abelian integral w of the first kind satisfies the equation
, every Abelian integral w of the first kind satisfies the equation

Let z be any nonconstant meromorphic function on ![]() . It assumes, as we know, every value the same number of times, say n times. Then the surface
. It assumes, as we know, every value the same number of times, say n times. Then the surface ![]() may be regarded as an n-sheeted covering surface
may be regarded as an n-sheeted covering surface ![]() over the z-sphere, if one agrees that a point
over the z-sphere, if one agrees that a point ![]() of
of ![]() lies over the point z = a of the z-sphere if the function z has the value a at
lies over the point z = a of the z-sphere if the function z has the value a at ![]() . This is the conception of a Riemann surface which Riemann himself employed in his works on algebraic functions and their integrals, and one would say today that Abel’s argument is most easily understood from this representation. Over those values a, for which the n points
. This is the conception of a Riemann surface which Riemann himself employed in his works on algebraic functions and their integrals, and one would say today that Abel’s argument is most easily understood from this representation. Over those values a, for which the n points ![]() at which z assumes the value a are not all distinct, there are certainly fewer than n points of the covering surface. If the function z assumes the finite value a r times at the point
at which z assumes the value a are not all distinct, there are certainly fewer than n points of the covering surface. If the function z assumes the finite value a r times at the point ![]() , then
, then ![]() is a local parameter at
is a local parameter at ![]() ; the point
; the point ![]() over a is a branch point of order r − 1. If
over a is a branch point of order r − 1. If ![]() is any neighborhood of
is any neighborhood of ![]() , then there exists a disc
, then there exists a disc ![]() on the z-sphere such that over every point of this disc (except the center) there are exactly r points of
on the z-sphere such that over every point of this disc (except the center) there are exactly r points of ![]() which lie in the neighborhood
which lie in the neighborhood ![]() . dz has a zero of order r − 1 at
. dz has a zero of order r − 1 at ![]() . (Therefore there can be only finitely many such values z = a over which there are fewer than n points of
. (Therefore there can be only finitely many such values z = a over which there are fewer than n points of ![]() .) If z assumes the value ∞ s times at the point
.) If z assumes the value ∞ s times at the point ![]() , then
, then ![]() is a local parameter at
is a local parameter at ![]() and we have a branch point of order s − 1; dz has a pole of order s + 1 at
and we have a branch point of order s − 1; dz has a pole of order s + 1 at ![]() . We denote the sum of the orders of all the branch points of the surface, its “branch order” by V. Then: the number of zeros − the number of poles of
. We denote the sum of the orders of all the branch points of the surface, its “branch order” by V. Then: the number of zeros − the number of poles of ![]() where the first sum on the right is over all points of the surface except those over z = ∞, while the second sum is over precisely the points over z = ∞. The right-hand side of this equation is
where the first sum on the right is over all points of the surface except those over z = ∞, while the second sum is over precisely the points over z = ∞. The right-hand side of this equation is
![]()
and the left-hand side = 2p − 2. Hence
![]()
The branch order is always even.
Now let dw be an arbitrary differential of the first kind on ![]() and let
and let ![]() in general be the points of
in general be the points of ![]() over the point z on the z-sphere. Then
over the point z on the z-sphere. Then

is a differential dW, which is regular everywhere on the z-sphere. But such a differential does not exist, except for dW = 0. If we draw any curve on the z-sphere from the south pole z = 0 to the north pole z = ∞, then the points of ![]() over this curve (which sometimes coalesce at branch points) form curves γ1, …, γn and it follows from integrating dW that
over this curve (which sometimes coalesce at branch points) form curves γ1, …, γn and it follows from integrating dW that
![]()
Each curve yv leads from a zero ![]() to a pole
to a pole ![]() of z. If one joins
of z. If one joins ![]() to
to ![]() by a curve
by a curve ![]() and denotes the curve
and denotes the curve ![]() then we obtain, as claimed, the equation (18.6).
then we obtain, as claimed, the equation (18.6).
Conversely, the congruences (18.2) follow from these equations, and hence the fact that the multiplicative function
has the multipliers ![]() = 1 and is uniform on
= 1 and is uniform on ![]() .
.
The coincidence of the lattices G and G0 now comes out as follows. First, by the lemma there exist points ![]() such that
such that

provided that the ni are given integers. In this process, definite paths ![]() and
and ![]() have been chosen. From this it follows that the multiplicative function
have been chosen. From this it follows that the multiplicative function
is uniform on ![]() . Hence, by the proof just carried out, paths
. Hence, by the proof just carried out, paths ![]() and
and ![]() may be determined so that for these paths the left-hand sides of (18.7) all vanish. Now
may be determined so that for these paths the left-hand sides of (18.7) all vanish. Now ![]() and
and ![]() are closed paths for which
are closed paths for which

The 2N closed loops ![]() and αv give together a closed path
and αv give together a closed path ![]() whose intersection numbers
whose intersection numbers ![]() with the curves αi of the integral basis, are the given integers ni.
with the curves αi of the integral basis, are the given integers ni.
Analytically one attacks the Jacobi inversion problem as follows. One uses an arbitrary meromorphic function f(![]() ) on
) on ![]() and attempts to determine, not the points
and attempts to determine, not the points ![]() themselves, but the values of the function f at the points
themselves, but the values of the function f at the points ![]() from (18.3) in their dependence on F1, F2, …, Fp. Since the values
from (18.3) in their dependence on F1, F2, …, Fp. Since the values ![]() are determined only to within a permutation, it makes better sense to replace them by their elementary symmetric functions; that is, by the coefficients of the equation
are determined only to within a permutation, it makes better sense to replace them by their elementary symmetric functions; that is, by the coefficients of the equation
![]()
of degree p whose roots are the numbers
![]()
These coefficients Ai, expressed in terms of ![]() are called, following Jacobi’s proposal, Abelian functions. Except for the singular systems
are called, following Jacobi’s proposal, Abelian functions. Except for the singular systems ![]() which form a subspace of dimension only (2p − 4) in the whole 2p-dimensional F-space, the Abelian functions are uniform and regular analytic. Furthermore, they are 2p-fold periodic. For if γI (l = 1, 2, …, 2p) is an integral basis for the closed paths on
which form a subspace of dimension only (2p − 4) in the whole 2p-dimensional F-space, the Abelian functions are uniform and regular analytic. Furthermore, they are 2p-fold periodic. For if γI (l = 1, 2, …, 2p) is an integral basis for the closed paths on ![]() and if
and if
![]()
then, for every value of the index l, the numbers ![]() are a period system for the Abelian function A((F)):
are a period system for the Abelian function A((F)):
![]()
These 2p period systems are linearly independent in the following sense: the determinant whose lth row is
![]()
is nonzero. If one carries through explicitly the proof which has been given here of the solvability of the inversion problem, then one obtains the following result: in every bounded portion
![]()
of the F-space, an Abelian function A((F)) may be represented as the quotient of two functions which are regular analytic throughout this bounded portion.27 The indeterminateness for the singular systems (F) arises because for these values both the numerator and the denominator in the representation vanish. The set of the points of indeterminateness possesses no translations onto itself except for those which obviously come from the periodicity of the Abelian functions.
Furthermore, Riemann and Weierstrass showed, by a much more penetrating analysis, that the Abelian functions, without restriction to a bounded set, may be represented as quotients of transcendental entire functions, the θ-functions. They gave an explicit analytic expression in the form of a rapidly convergent infinite series for the θ-functions. These 0-functions also suffice as a basis for the general theory of the 2p-fold periodic functions of p independent complex arguments; the theory of Abelian functions is only a special case.28
The contents of this and the preceding paragraph show convincingly the ruling role played by the genus p, which is in essence a topological quantity, in the theory of functions and integrals on a closed Riemann surface. We were concerned with two trains of thought which we shall state once again with the labels
additive functions, partial fraction decomposition, Riemann-Roch theorem multiplicative functions, product representation, Abel’s theorem.
These two trains of thought permeate the theory of uniform functions on ![]() from here on this theory is easily completed with the aid of the reciprocity laws of § 16. But the significance of this structure shows up in the proper light only when we become familiar with the system of meromorphic functions on a closed Riemann surface from a third point of view, as an algebraic function field; this will be done in the next section. And first from this aspect do those functions appear most intimately related to our other interests, the algebraic and the geometric - in so far as these relate to the theory of algebraic curves in the plane and in spaces of higher dimension.
from here on this theory is easily completed with the aid of the reciprocity laws of § 16. But the significance of this structure shows up in the proper light only when we become familiar with the system of meromorphic functions on a closed Riemann surface from a third point of view, as an algebraic function field; this will be done in the next section. And first from this aspect do those functions appear most intimately related to our other interests, the algebraic and the geometric - in so far as these relate to the theory of algebraic curves in the plane and in spaces of higher dimension.
§ 19. The algebraic function field
The meromorphic functions on a given closed Riemann surface ![]() form a field; this means precisely that the sum, difference, product, and quotient of two meromorphic functions (only division by 0 is ruled out) is again such a function. As was already done in the last section, one chooses a definite nonconstant meromorphic function z on
form a field; this means precisely that the sum, difference, product, and quotient of two meromorphic functions (only division by 0 is ruled out) is again such a function. As was already done in the last section, one chooses a definite nonconstant meromorphic function z on ![]() for the independent variable. Thereby
for the independent variable. Thereby ![]() becomes an n-sheeted covering surface
becomes an n-sheeted covering surface ![]() over the z-sphere, and the uniform meromorphic functions f on
over the z-sphere, and the uniform meromorphic functions f on ![]() become n-valued algebraic functions of z. In this fashion there exists an algebraic function field belonging to
become n-valued algebraic functions of z. In this fashion there exists an algebraic function field belonging to ![]() , which includes the field k(z) = k of rational functions of z. Namely, the meromorphic function f satisfies identically a definite equation
, which includes the field k(z) = k of rational functions of z. Namely, the meromorphic function f satisfies identically a definite equation
![]()
of degree n, in which the ri(z) are rational functions of z. More precisely, this means the following. Let ![]() be any point of
be any point of ![]() , let t be a local parameter at
, let t be a local parameter at ![]() , and let z = z(t) and f = f(t) be the expansions of z and f in integral powers of t in the neighborhood of
, and let z = z(t) and f = f(t) be the expansions of z and f in integral powers of t in the neighborhood of ![]() ; then the left-hand side of (19.1) becomes identically zero when one substitutes the power series z(t) and f(t) for z and f respectively. To derive the equation (19.1), we first exclude the point z = ∞ from the z-sphere as well as those points over which there are branch points, and those points over which f has poles. For every other value of z we form the number
; then the left-hand side of (19.1) becomes identically zero when one substitutes the power series z(t) and f(t) for z and f respectively. To derive the equation (19.1), we first exclude the point z = ∞ from the z-sphere as well as those points over which there are branch points, and those points over which f has poles. For every other value of z we form the number
![]()
where the sum on the right is over the n points over z. The sum is independent of the ordering of these points. In the neighborhood of a nonexcluded point
![]()
![]() become power series in z − z0, and r1(z) is a regular analytic function at every nonexcluded point. This function cannot have an essential singularity at any excluded point; hence it has only poles. If one uses a local parameter at a point of
become power series in z − z0, and r1(z) is a regular analytic function at every nonexcluded point. This function cannot have an essential singularity at any excluded point; hence it has only poles. If one uses a local parameter at a point of ![]() z over an excluded value z0, this may also be verified by elementary calculation. Hence r1(z) is a rational function of z. Similarly, one sees that the other elementary symmetric functions of
z over an excluded value z0, this may also be verified by elementary calculation. Hence r1(z) is a rational function of z. Similarly, one sees that the other elementary symmetric functions of ![]() are rational functions of z. The equation (19.1), which is determined uniquely by f is called the field equation of f.
are rational functions of z. The equation (19.1), which is determined uniquely by f is called the field equation of f.
Furthermore, I claim that from the functions g belonging to the function field K associated with ![]() z, an f may he chosen such that every g may be expressed rationally in terms of f and z. This f is called a function determining the function field. If
z, an f may he chosen such that every g may be expressed rationally in terms of f and z. This f is called a function determining the function field. If ![]() z, has the n distinct points
z, has the n distinct points ![]() over z0, then it suffices to choose f such that it assumes n distinct values at these points. If dτk (k = 1, …, n) is a differential that has a pole only at
over z0, then it suffices to choose f such that it assumes n distinct values at these points. If dτk (k = 1, …, n) is a differential that has a pole only at ![]() and has the principal part − (z − z0)−2dz, then one can set, for example,
and has the principal part − (z − z0)−2dz, then one can set, for example,

where one chooses any n different constants for C1, …, Cn. The field equation of f is then irreducible; that is, its left-hand side, the polynomial
![]()
of degree n in the variable u, cannot be factored into two polynomials ![]() whose coefficients are also rational functions of z. For assume that this were possible; in a neighborhood of
whose coefficients are also rational functions of z. For assume that this were possible; in a neighborhood of ![]() , f may be developed in a power series in the local parameter z − z0 at
, f may be developed in a power series in the local parameter z − z0 at ![]() . Suppose that this power series, replacing u, satisfies the equation
. Suppose that this power series, replacing u, satisfies the equation ![]() . Join
. Join ![]() to any one of the points
to any one of the points ![]() by a curve on
by a curve on ![]() whose trace on the z-sphere does not pass through any of the excluded points. Then all the function elements (z,f) along this curve must satisfy the equation
whose trace on the z-sphere does not pass through any of the excluded points. Then all the function elements (z,f) along this curve must satisfy the equation ![]() . Hence f(
. Hence f(![]() ) is also a root of the equation
) is also a root of the equation ![]() thus it has n distinct roots and must be of degree n. Hence
thus it has n distinct roots and must be of degree n. Hence ![]() is only of degree 0 in u, and a factorization of the contemplated type does not exist.
is only of degree 0 in u, and a factorization of the contemplated type does not exist.
To each point ![]() of
of ![]() there belongs a function element (z, f) which satisfies the equation Fz(u) = 0. For two distinct points these function elements are always different, and the elements belonging to all points
there belongs a function element (z, f) which satisfies the equation Fz(u) = 0. For two distinct points these function elements are always different, and the elements belonging to all points ![]() exhaust the totality of those which satisfy that equation. In other words: the totality of those function elements which satisfy the irreducible algebraic equation Fz (u) = 0 constitutes a single analytic form in the sense of Weierstrass. This analytic form, regarded as a Riemann surface, is conformally equivalent to the given Riemann surface. The given surface is- the Riemann surface which belongs to the algebraic form defined by the equation Fz(u) = 0.
exhaust the totality of those which satisfy that equation. In other words: the totality of those function elements which satisfy the irreducible algebraic equation Fz (u) = 0 constitutes a single analytic form in the sense of Weierstrass. This analytic form, regarded as a Riemann surface, is conformally equivalent to the given Riemann surface. The given surface is- the Riemann surface which belongs to the algebraic form defined by the equation Fz(u) = 0.
In order to express the given element g of the function field K rationally in f, we apply the Lagrange interpolation formula

Again ![]() denote the n points of
denote the n points of ![]() over the point z on the z-sphere. By the same argument as above, one finds that the coefficients of the polynomial
over the point z on the z-sphere. By the same argument as above, one finds that the coefficients of the polynomial ![]() of degree n − 1, are rational functions of z. For all values of z for which
of degree n − 1, are rational functions of z. For all values of z for which ![]() are different, it follows that
are different, it follows that

Since the polynomial Fz(u) is irreducible over the coefficient field k(z), Fz(u) and ![]() are without common divisor over this field. Therefore the Euclidean division algorithm produces two polynomials, Hz(u) and Lz(u), with coefficients which are rational functions of z, such that
are without common divisor over this field. Therefore the Euclidean division algorithm produces two polynomials, Hz(u) and Lz(u), with coefficients which are rational functions of z, such that
![]()
If we introduce the polynomial ![]() , then the equation
, then the equation
![]()
becomes an identity on the surface. Finally, by means of the equation Fz(u) = 0, the polynomial Gz(u) may be reduced to one of degree n − 1. Hence any element g of our function field has a unique representation of the form
![]()
where the Ri(z) are rational functions of z. In this sense the quantities 1, f, …, fn−1 form a basis for the algebraic function field K relative to the ground field k of rational functions of z. Hence one calls n the degree of K over k.
Here one finds a purely algebraic attack on the idea of a function field. One operates with polynomials G(u) with coefficients in the field k. An irreducible polynomial F(u) of degree n is given. By identifying polynomials G(u) which are congruent modulo F(u), the “ring” of polynomials becomes a field K, of degree n over the ground field k,29
If the independent variable z is replaced by any other function, z*, on the surface, then there are infinitely many ways of choosing the function f* on the surface such that all functions may be expressed rationally in terms of z and f*. There is an irreducible algebraic equation F*z*(f*) = 0 relating z* and f*. Also, z* and f* are rational functions of the variables z and f, which are related by Fz(f) = 0; conversely, z and f are rational functions of the variables z* and f*, which are related by F*z*(f*) = 0. Through the birational transformation (z,f) ![]() (z*, f*) the equations
(z*, f*) the equations
![]()
turn into each other. The degree of this equation is, naturally, not by any means an invariant under birational transformations. But the genus p is invariant under birational transformations.
If there exists a function z on ![]() which takes each value just once, then the associated algebraic function field is the field of rational functions of z (and p = 0). If there is no function on
which takes each value just once, then the associated algebraic function field is the field of rational functions of z (and p = 0). If there is no function on ![]() which takes each value just once, but if there is a function z which takes each value exactly twice, then we may assume that the algebraic equation (which must be quadratic) determining the function field has the form
which takes each value just once, but if there is a function z which takes each value exactly twice, then we may assume that the algebraic equation (which must be quadratic) determining the function field has the form
![]()
where the ei are all different. These l points and, if l is odd, the point ∞, are branch points of order 1, and hence the genus p is = (l/2) − 1 if l is even, and = (l − 1)/2 if l is odd. We see that l = 1 or 2 leads again to the rational field p = 0; l = 3 or l = 4 gives p = 1, which is the elliptic case; if l > 4, we get the so-called hyperelliptic function fields.
In an arbitrary algebraic function field of genus p = 1 there always exists a function with two prescribed poles, therefore a function which assumes each value only twice. In every function field of genus 2 we obtain a function of the same sort by dividing two linearly independent Abelian differentials of the first kind. But, starting with p = 3, the hyperelliptic case is no longer the general one.
In the theory of algebraic function fields, two paths are clearly indicated along which one can reach a deeper understanding of the laws governing them. One is that of abstract algebra; here the algebraic concepts of field, field extensions, the degree of a field over the ground field, the degree of transcendence, prime place, etc., are paramount; one admits coefficient fields of characteristic other than zero. Here algebraic construction must furnish that which was accomplished in our development by the Dirichlet principle and the method of integration. The other path, that trod by Riemann, is the “topological,” which we have followed. One may describe Weierstrass’ point of view as an algebraic-function-theoretic one lying between these two extremes: explicit construction reigns, but one always operates in the continuum of complex numbers. Similar remarks apply to the “Kurventheoretiker” of the German and Italian schools. The concept of an analytic form as a two-dimensional manifold lies close enough here, even if the further step, of regarding the topological properties of this manifold as more primitive than all others, is not completed. Furthermore, it is characteristic of the Riemannian type of development that it is always the Riemann surface, not the analytic form, which is regarded as the given object; the construction of an associated analytic form is a principal component of the problem to be solved. To be sure, in Riemann’s treatment itself this point of view does not appear with the complete clarity with which we can now distill it from the works of Prym, Dedekind,30 C. Neumann, and particularly Klein.31
Every closed Riemann surface of genus p may, as we saw, be represented as a multiple-sheeted covering surface over the sphere (with finitely many branch points, and without boundary). There is a great multitude of these “normal forms,” even when one normalizes the number of sheets by the condition n = p + 1 (which is always possible). A much more fundamental significance attaches to the essentially unique normal form of the Riemann surface of arbitrary genus, which is furnished by the theory of uniformization (theory of automorphic functions).
In the theory of uniformization the ideas of Weierstrass and of Riemann grow into a complete unity. With Weierstrass the analytic form (z, u) is described at each individual point by a particular representation with the aid of a parameter t (the “local parameters”): z = z(t), u = u(t). Certainly Riemann obtains a global representation z = z(![]() ), u = u(
), u = u(![]() ) of the whole form, but he is forced to regard the parameter
) of the whole form, but he is forced to regard the parameter ![]() as a point on a Riemann surface (not as a complex variable in the usual sense). Uniformization theory is concerned with obtaining a global representation z = z(t), u = u(t) with the aid of a parameter t, the uniformizing variable, which varies in a domain of the smooth complex plane. F. Klein and H. Poincaré32 must be named as the true founders of the theory of automorphic functions, to which our problem leads. Their way to the general concepts and results was prepared in the literature by important, but more specialized, investigations of Riemann, Schwarz, Fuchs, Dedekind, Klein, and Schottky. The proof of the possibility of uniformization, based on the concept of a covering surface, was furnished simultaneously in 1907 by P. Koebe and H. Poincaré.33 From then on, Koebe spent his whole scientific life in studying the problem of uniformization thoroughly from all sides, and with the most varied methods.34 To him above all we owe it that today the theory of uniformization, which certainly may claim a central role in complex function theory, stands before us as a mathematical structure of particular harmony and grandeur.
as a point on a Riemann surface (not as a complex variable in the usual sense). Uniformization theory is concerned with obtaining a global representation z = z(t), u = u(t) with the aid of a parameter t, the uniformizing variable, which varies in a domain of the smooth complex plane. F. Klein and H. Poincaré32 must be named as the true founders of the theory of automorphic functions, to which our problem leads. Their way to the general concepts and results was prepared in the literature by important, but more specialized, investigations of Riemann, Schwarz, Fuchs, Dedekind, Klein, and Schottky. The proof of the possibility of uniformization, based on the concept of a covering surface, was furnished simultaneously in 1907 by P. Koebe and H. Poincaré.33 From then on, Koebe spent his whole scientific life in studying the problem of uniformization thoroughly from all sides, and with the most varied methods.34 To him above all we owe it that today the theory of uniformization, which certainly may claim a central role in complex function theory, stands before us as a mathematical structure of particular harmony and grandeur.
The basic idea of the following proof, to derive the existence of the uniformizing variable from the Dirichlet principle, comes from Hilbert.35
The uniformizing variable t that we seek should be such that it is suitable as a local parameter at each point of the given surface ![]() . Therefore it must be a uniform function, regular analytic except for poles of order one, on the universal covering surface
. Therefore it must be a uniform function, regular analytic except for poles of order one, on the universal covering surface ![]() . If we seek that function t which possesses the strongest uniformizing power, then we will attempt to determine t such that it assumes distinct values at any two distinct points of the surface
. If we seek that function t which possesses the strongest uniformizing power, then we will attempt to determine t such that it assumes distinct values at any two distinct points of the surface ![]() ; then it will map
; then it will map ![]() one-to-one and conformally onto a domain of the t-sphere. Then not only the functions on the base surface
one-to-one and conformally onto a domain of the t-sphere. Then not only the functions on the base surface ![]() can be represented as uniform functions of t; but also the much larger class of functions (which are in general infinitely many-valued on
can be represented as uniform functions of t; but also the much larger class of functions (which are in general infinitely many-valued on ![]() ) which arise from any function element on
) which arise from any function element on ![]() which can be continued, without branching, along all paths in
which can be continued, without branching, along all paths in ![]() . And since
. And since ![]() (in contrast to
(in contrast to ![]() ) is simply connected, the possibility of such a map does not contradict the analysis-situs properties of
) is simply connected, the possibility of such a map does not contradict the analysis-situs properties of ![]() . We may well drop now the basic assumption of the preceding sections, that
. We may well drop now the basic assumption of the preceding sections, that ![]() be closed; this assumption would not simplify anything in uniformization theory.
be closed; this assumption would not simplify anything in uniformization theory.
We obtain the desired uniformizing variable simply by applying the Dirichlet principle, not to ![]() , but to the universal covering surface
, but to the universal covering surface ![]() . We choose a point
. We choose a point ![]() on
on ![]() with the local parameter ζ; then we construct on
with the local parameter ζ; then we construct on ![]() , with the aid of the Dirichlet principle, the potential function U which is regular everywhere on
, with the aid of the Dirichlet principle, the potential function U which is regular everywhere on ![]() except at
except at ![]() , which behaves like
, which behaves like ![]() (1/ζ) at
(1/ζ) at ![]() , and with the following properties.
, and with the following properties.
(1) The Dirichlet integral of U over all of ![]() , except for an arbitrarily small ζ-disc about
, except for an arbitrarily small ζ-disc about ![]() , is finite,
, is finite,
(2) For every continuously differentiable function w on ![]() , with finite Dirichlet integral, which vanishes in a neighborhood of
, with finite Dirichlet integral, which vanishes in a neighborhood of ![]() , the variation D(U, w) satisfies
, the variation D(U, w) satisfies
![]()
U generates a differential dτ on ![]() ; since
; since ![]() is simply connected, this must be the differential of a certain function
is simply connected, this must be the differential of a certain function
![]()
whose real part coincides with U, which is regular analytic everywhere except at ![]() , and which has a pole of order one at
, and which has a pole of order one at ![]() . Then τ is a uniformizing variable of the type we seek. The proof of this fact follows in a very elegant fashion with the aid of the following deduction, due to Koebe.36
. Then τ is a uniformizing variable of the type we seek. The proof of this fact follows in a very elegant fashion with the aid of the following deduction, due to Koebe.36
We prove first the following fact.
If V0 is any real constant, then the points of ![]() at which V > V0 form a single domain; similarly for the points where V < V0.
at which V > V0 form a single domain; similarly for the points where V < V0.
Now 1/τ is a local parameter at ![]() ; let K0 : | 1/τ | ≤ a0, be a (l/τ)-disc about
; let K0 : | 1/τ | ≤ a0, be a (l/τ)-disc about ![]() . Let
. Let ![]() (V0) be the closed set on
(V0) be the closed set on ![]() consistingofthepoints where V = V0; then certainly only two of the domains determined by
consistingofthepoints where V = V0; then certainly only two of the domains determined by ![]() (V0) have points in K0. If our claim were false, then among the domains determined by
(V0) have points in K0. If our claim were false, then among the domains determined by ![]() (V0) there would be one, say
(V0) there would be one, say ![]() , that did not penetrate the neighborhood K0 of
, that did not penetrate the neighborhood K0 of ![]() . Now let ϕ(u) and ψ(u) be any two real functions, defined and continuously differentiable for all real values u. We form the following function w on the surface
. Now let ϕ(u) and ψ(u) be any two real functions, defined and continuously differentiable for all real values u. We form the following function w on the surface ![]() :
:

This function is everywhere continuously differentiable, provided that

In the neighborhood K0 of ![]() , w vanishes identically. If
, w vanishes identically. If ![]() is any point in
is any point in ![]() and if z = x + iy is a local parameter at
and if z = x + iy is a local parameter at ![]() , then
, then
If ϕ, ϕ′, ψ, and ψ′ are bounded functions, then the Dirichlet integral of w over all of ![]() will be finite. Then, under the given conditions, D(U, w) = 0. Now
will be finite. Then, under the given conditions, D(U, w) = 0. Now

If we choose ϕ and ψ such that and ϕ′ and ψ are positive for all values of their argument (except for u = V0 in the case of ψ), then we have a contradiction.37
From the fact proved, and the simple connectivity of ![]() , one can draw conclusions on the behavior of τ.
, one can draw conclusions on the behavior of τ.
(1) dτ has no zeros. If at a point ![]() on
on ![]() , where τ = τ0, dτ = 0, then not τ − τ0, but (τ − τ0)1/r (r an integer ≥ 2) would be a local parameter at
, where τ = τ0, dτ = 0, then not τ − τ0, but (τ − τ0)1/r (r an integer ≥ 2) would be a local parameter at ![]() ; let us assume r = 2; the proof for larger r is analogous. I set τ − τ0 = σ2 and draw in the complex σ-plane a disc K, with center σ = 0, so small that it is, via the function σ, the conformal image of a certain neighborhood of the point
; let us assume r = 2; the proof for larger r is analogous. I set τ − τ0 = σ2 and draw in the complex σ-plane a disc K, with center σ = 0, so small that it is, via the function σ, the conformal image of a certain neighborhood of the point ![]() on
on ![]() . I take four points
. I take four points ![]() ,
, ![]() ,
, ![]() ,
, ![]() in K, as indicated in Fig. 9, which are the vertices of a cross formed by two linear segments, α and β, crossing at the origin. At
in K, as indicated in Fig. 9, which are the vertices of a cross formed by two linear segments, α and β, crossing at the origin. At ![]() and
and ![]() , V > V0; at
, V > V0; at ![]() and
and ![]() , V < V0. I think of this figure transferred to the surface
, V < V0. I think of this figure transferred to the surface ![]() ; then I can join
; then I can join ![]() and
and ![]() by a curve α′, at every point of which V > V0; likewise, I can join
by a curve α′, at every point of which V > V0; likewise, I can join ![]() and
and ![]() by a curve β′ on which V < V0. The intersection number of the two closed curves, α + α′ and β + β′, is thus = 1. But this contradicts the fact that α + α′, as a curve on the simply connected surface
by a curve β′ on which V < V0. The intersection number of the two closed curves, α + α′ and β + β′, is thus = 1. But this contradicts the fact that α + α′, as a curve on the simply connected surface ![]() , must be homologous to zero.
, must be homologous to zero.
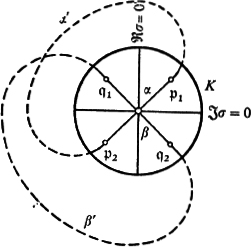
FIGURE 9
(2) If I say that a point of the surface ![]() , at which τ has the value τ0, lies over the point τ0 of the τ-sphere, then
, at which τ has the value τ0, lies over the point τ0 of the τ-sphere, then ![]() becomes a covering surface
becomes a covering surface ![]() of the τ-sphere or the τ-plane. By what we have proved under (1), this covering is unbranched. There is just one point,
of the τ-sphere or the τ-plane. By what we have proved under (1), this covering is unbranched. There is just one point, ![]() , over τ = ∞. I follow the line V = V0, starting at τ = ∞, in the τ-plane in the direction from smaller to larger values of U; on
, over τ = ∞. I follow the line V = V0, starting at τ = ∞, in the τ-plane in the direction from smaller to larger values of U; on ![]() , the point
, the point ![]() , starting at
, starting at ![]() , traces a curve over this line in the τ-plane. If I do not run into any boundary before returning to ∞, then
, traces a curve over this line in the τ-plane. If I do not run into any boundary before returning to ∞, then ![]() describes a closed curve
describes a closed curve ![]() , for there is only the single point
, for there is only the single point ![]() over ∞ then
over ∞ then ![]() covers the line V = V0 in the τ-plane simply. But if I meet an obstruction, then I obtain a curve
covers the line V = V0 in the τ-plane simply. But if I meet an obstruction, then I obtain a curve ![]() on
on ![]() which covers a certain piece U < U1 of the line V = V0 simply. Then I follow the line V = V0, now from larger to smaller values of U, and obtain a curve
which covers a certain piece U < U1 of the line V = V0 simply. Then I follow the line V = V0, now from larger to smaller values of U, and obtain a curve ![]() on
on ![]() which covers a piece U > U2 of the line simply. The sum
which covers a piece U > U2 of the line simply. The sum ![]() +
+ ![]() forms a curve
forms a curve ![]() through
through ![]() , nonclosed, and without end on
, nonclosed, and without end on ![]() . In either case, the curve
. In either case, the curve ![]() separates the surface
separates the surface ![]() , since it is simply connected, into two domains,
, since it is simply connected, into two domains, ![]() and
and ![]() . If, outside of
. If, outside of ![]() , there were points of
, there were points of ![]() at which V = V0, say in
at which V = V0, say in ![]() , then there would be points in
, then there would be points in ![]() at which V < V0 and points at which V > V0. The point set
at which V < V0 and points at which V > V0. The point set ![]() (V0) would then determine at least three domains. Therefore
(V0) would then determine at least three domains. Therefore ![]() exhausts the points at which V = V0. Thus, as a covering of the τ-sphere,
exhausts the points at which V = V0. Thus, as a covering of the τ-sphere, ![]() is everywhere at most two sheeted. A value U0 + iV0 will certainly occur once and only once on
is everywhere at most two sheeted. A value U0 + iV0 will certainly occur once and only once on ![]() , if V = V0 is a closed curve on
, if V = V0 is a closed curve on ![]() .
.
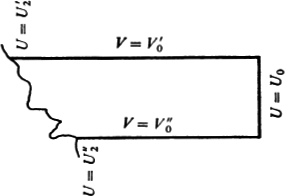
FIGURE 10
We still want to prove carefully that ![]() must always separate the surface
must always separate the surface ![]() . For this purpose we construct a two-sheeted, unbranched, and unlimited covering surface over
. For this purpose we construct a two-sheeted, unbranched, and unlimited covering surface over ![]() as follows. Cut
as follows. Cut ![]() along
along ![]() , take two copies of this cut surface and identify the edges of the slits criss-cross. Put abstractly, this amounts to the following. To each point
, take two copies of this cut surface and identify the edges of the slits criss-cross. Put abstractly, this amounts to the following. To each point ![]() of
of ![]() we associate two points “over it,”
we associate two points “over it,” ![]() and
and ![]() . If
. If ![]() is a point not on
is a point not on ![]() , τ0 = τ(
, τ0 = τ(![]() ), and
), and ![]() an arbitrary (τ − τ0)-disc which does not intersect
an arbitrary (τ − τ0)-disc which does not intersect ![]() , then the points
, then the points ![]() (with upper index 1) which lie over the interior points
(with upper index 1) which lie over the interior points ![]() of
of ![]() constitute a “neighborhood” of
constitute a “neighborhood” of ![]() ; those points
; those points ![]() over the same points
over the same points ![]() constitute a “neighborhood” of
constitute a “neighborhood” of ![]() . On the other hand, if
. On the other hand, if ![]() is on
is on ![]() , let
, let ![]() denote an arbitrary (τ − τ0)-disc. Those points
denote an arbitrary (τ − τ0)-disc. Those points ![]() whose trace points
whose trace points ![]() lie inside
lie inside ![]() and satisfy the condition V ≥ V0, together with all points
and satisfy the condition V ≥ V0, together with all points ![]() lying over inner points
lying over inner points ![]() of
of ![]() which satisfy the condition V < V0, shall constitute a “neighborhood” of
which satisfy the condition V < V0, shall constitute a “neighborhood” of ![]() . The neighborhood of
. The neighborhood of ![]() is defined analogously. In the last case all the points in
is defined analogously. In the last case all the points in ![]() at which V = V0 certainly belong to
at which V = V0 certainly belong to ![]() ; hence this definition of the concept of neighborhood is in agreement with all the demands to be made of such a definition. If
; hence this definition of the concept of neighborhood is in agreement with all the demands to be made of such a definition. If ![]() does not separate
does not separate ![]() , then it is clear that the manifold just defined also satisfies the condition that any two of its points can be joined by a continuous curve. But the existence of such a covering surface would contradict the fact that
, then it is clear that the manifold just defined also satisfies the condition that any two of its points can be joined by a continuous curve. But the existence of such a covering surface would contradict the fact that ![]() is simply connected.
is simply connected.
The last step in the proof is the demonstration of the following theorem.
There exists at most one real number V0 such that the associated line V = V0 on ![]() is nonclosed.
is nonclosed.
For if there were two such lines ![]() and
and ![]() , say
, say ![]() and
and ![]() then one makes use of a closed line U = U0 completely contained in K0 (U0 is chosen large enough). Let
then one makes use of a closed line U = U0 completely contained in K0 (U0 is chosen large enough). Let ![]() be one of the pieces
be one of the pieces ![]() of the curve
of the curve ![]() ; let
; let ![]() be the piece
be the piece ![]() of
of ![]() . Over the heavily drawn path (Fig. 10, the three segments) in the τ-plane there is a curve in
. Over the heavily drawn path (Fig. 10, the three segments) in the τ-plane there is a curve in ![]() , which covers the path simply, and has no ends on
, which covers the path simply, and has no ends on ![]() . This curve separates the simply connected
. This curve separates the simply connected ![]() into two domains; let
into two domains; let ![]() be that one of the two domains which does not contain the point
be that one of the two domains which does not contain the point ![]() . Again we set
. Again we set

For this function to be continuously differentiable on ![]() , we must have
, we must have

Let ϕ, ϕ′, ψ, ψ′ be bounded and let ϕ′ (except for u = U0) and ψ (except for u = ![]() or
or ![]() ) be positive.38 Then we get a contradiction of the equation D(U, w) = 0. Thus we have proved the following.
) be positive.38 Then we get a contradiction of the equation D(U, w) = 0. Thus we have proved the following.
τ maps the surface ![]() one-to-one and conformally either onto the complete sphere (case 1)
one-to-one and conformally either onto the complete sphere (case 1)
or
onto the sphere with one point τ0 removed (case 2)
or
onto the sphere with a slit V = V0, U1 ≤ U ≤ U2 removed (case 3).
We replace τ by a somewhat different uniformizing variable t. To be sure, t = τ in case 1. In the second case we arrange it so that the point omitted from the sphere is the point at ∞: set t = 1/(τ − τ0); t maps the covering surface onto the whole plane (without the point at ∞). In the third case we first apply an entire linear transformation so that the slit is given by
![]()
Then, with the aid of the formula
the slit τ-sphere is mapped conformally onto the interior of the unit disc | t | < 1 in the t-plane.
The construction we have described of the uniformizing variable t occurs in two clearly separate steps. First, the surface ![]() solves the problem in so far as it belongs to analysis situs. Then the function theoretic theorem, every simply connected Riemann surface may be mapped conformally onto a domain on the sphere, applied to
solves the problem in so far as it belongs to analysis situs. Then the function theoretic theorem, every simply connected Riemann surface may be mapped conformally onto a domain on the sphere, applied to ![]() gives the uniformizing variable. By a slight modification of the argument, one can also show that every planar surface may be mapped conformally onto a domain on the sphere. For nonplanar surfaces this is impossible, for reasons of analysis situs: there will not exist even a topological map onto a domain on the sphere. Every uniformizing variable belonging to
gives the uniformizing variable. By a slight modification of the argument, one can also show that every planar surface may be mapped conformally onto a domain on the sphere. For nonplanar surfaces this is impossible, for reasons of analysis situs: there will not exist even a topological map onto a domain on the sphere. Every uniformizing variable belonging to ![]() (unbranched relative to
(unbranched relative to ![]() ) will map a certain unbranched, unlimited, planar covering surface
) will map a certain unbranched, unlimited, planar covering surface ![]() over
over ![]() conformally onto a plane domain. One assigns two uniformizing variables which map the same covering surface
conformally onto a plane domain. One assigns two uniformizing variables which map the same covering surface ![]() onto subdomains of the plane to the same class {
onto subdomains of the plane to the same class {![]() }. The determination of all uniformizing variables requires then the solution of two problems.
}. The determination of all uniformizing variables requires then the solution of two problems.
(1) The analysis-situs problem: to determine all unbranched unlimited planar covering surface ![]() of a given surface
of a given surface ![]() .
.
(2) The conformal mapping problem: to find all possible conformal maps of a planar surface ![]() onto a plane domain.
onto a plane domain.
That the last is always possible in at least one (and hence in infinitely many) way (in other words, that every class of uniformizers {![]() } conceivable under the analysis-situs condition of planarity actually exists in the function theoretic sense) is the content of Koebe’s general uniformization principle.39 As a matter of fact, this principle goes even further; it includes not only the uniformizing variables which are unbranched relative to
} conceivable under the analysis-situs condition of planarity actually exists in the function theoretic sense) is the content of Koebe’s general uniformization principle.39 As a matter of fact, this principle goes even further; it includes not only the uniformizing variables which are unbranched relative to ![]() , but also the great multitude of branched uniformizing variables. But without question, the uniformizing variable which we have set up and denoted by t carries more fundamental significance than any other uniformizing variable.
, but also the great multitude of branched uniformizing variables. But without question, the uniformizing variable which we have set up and denoted by t carries more fundamental significance than any other uniformizing variable.
§ 21. Riemann surfaces and non-Euclidean groups of motions. Fundamental regions. Poincaré ![]() -series
-series
To what extent is the uniformizing variable t determined by the properties stated at the end of the last section? That is, in how many ways can one map the surface ![]() conformally onto the sphere, the plane, or the unit disc? This question obviously comes down to the following: in how many ways can one map the sphere, plane, or disc conformally onto one of these three domains? To begin with, it is clear that the sphere, since it is closed, can be mapped onto neither the plane nor the disc. Also, a conformal map of the plane onto the disc is impossible. If the function t*(t) transformed the t-plane conformally onto the unit disc in the t*-plane, then it would be an entire function whose absolute value would be bounded by one. By Liouville’s theorem, there is no such function (except for the constants, which make no sense here). Furthermore, the following simple theorems hold.
conformally onto the sphere, the plane, or the unit disc? This question obviously comes down to the following: in how many ways can one map the sphere, plane, or disc conformally onto one of these three domains? To begin with, it is clear that the sphere, since it is closed, can be mapped onto neither the plane nor the disc. Also, a conformal map of the plane onto the disc is impossible. If the function t*(t) transformed the t-plane conformally onto the unit disc in the t*-plane, then it would be an entire function whose absolute value would be bounded by one. By Liouville’s theorem, there is no such function (except for the constants, which make no sense here). Furthermore, the following simple theorems hold.
(CASE 1). The set of conformal maps of the sphere(represented in the usual fashion by a complex variable) onto itself is the set of linear transformations.
(CASE 2). The conformal maps of the complex plane onto itself are given precisely by the entire linear transformations.
(CASE 3). Likewise, the open unit disc can be mapped conformally onto itself only by linear transformations.
Case 1. We have to show that if the t-sphere is mapped conformally onto the t*-sphere, t* = t*(t), so that t = 0 goes into t* = 0 and t = ∞ goes into t* = ∞, then the map must be of the form t* = ct, where c is a constant. Now 1/t* is regular at the north pole (t = ∞) of the t-sphere and has a zero there; so t/t* is regular there. Since the relation t → t* is one-to-one, t* vanishes only at t = 0, where it has a zero of order one; hence t/t* is regular on the complete t-sphere, and is thus a constant.
Case 2. Again we may assume that t = 0 is mapped into t* = 0. Next one has to prove that

The circle | t* | = R* corresponds to a closed curve ![]() in the t-plane; let R0 be the maximum distance of a point on
in the t-plane; let R0 be the maximum distance of a point on ![]() from the origin, and let R be an arbitrary number > R0. In the disc | t | ≤ R, | t* | assumes its maximum, which must be > R* at some boundary point, say t = t0. The image
from the origin, and let R be an arbitrary number > R0. In the disc | t | ≤ R, | t* | assumes its maximum, which must be > R* at some boundary point, say t = t0. The image ![]() , of the circle | t | = R, in the t*-plane cannot meet the circle | t* | = R*; for the circle | t | = R and the curve
, of the circle | t | = R, in the t*-plane cannot meet the circle | t* | = R*; for the circle | t | = R and the curve ![]() , of which those two curves are the images, do not meet in the t-plane. Since the point t*(t0) on
, of which those two curves are the images, do not meet in the t-plane. Since the point t*(t0) on ![]() has an absolute value > R*, we must have | t* | > R* for all points on
has an absolute value > R*, we must have | t* | > R* for all points on ![]() . That is, | t | > R0 implies | t* | > R*, and this is the claim (21.1). Hence l/t*(t) is regular at the north pole of the t-sphere and has a zero there. The rest of the argument is exactly the same as in case 1.
. That is, | t | > R0 implies | t* | > R*, and this is the claim (21.1). Hence l/t*(t) is regular at the north pole of the t-sphere and has a zero there. The rest of the argument is exactly the same as in case 1.
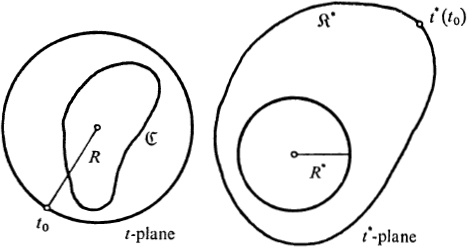
FIGURE 11
We settle case 3 with the aid of the so-called Schwarz lemma.40 Again we may assume that t = 0 goes into t* = 0. If I consider the regular function t*/t in the disc | t | ≤ q (< 1), it must attain its maximum absolute value on the boundary, and hence this maximum is < 1/q ( | t* | < 1,| t | = q). Since I can choose q arbitrarily close to 1, | t*/t | ≤ 1 must hold at all points of the open unit disc. In a similar fashion, | t/t* | ≤ 1, and hence | t*/t | = 1. This is possible only if t*/t is a constant of modulus one.
With this the stated claims are demonstrated: the uniformizing parameter t is always uniquely determined to within a linear transformation. The linear transformations which map the open unit disc onto itself have the form

In particular, since the cover transformations of ![]() are one-to-one conformal maps of
are one-to-one conformal maps of ![]() onto itself, these cover transformations must correspond to linear transformations in the t-plane. Thus there corresponds to the group of cover transformations a certain isomorphic group Γ of linear transformations. No transformation of the group Γ (except the identity) can have a fixed point in the image domain (sphere, plane, or disc); a fixed point is a point that goes into itself under the transformation. Since every linear transformation of the sphere has a fixed point, there are no cover transformations in case I, except the identity. Then
onto itself, these cover transformations must correspond to linear transformations in the t-plane. Thus there corresponds to the group of cover transformations a certain isomorphic group Γ of linear transformations. No transformation of the group Γ (except the identity) can have a fixed point in the image domain (sphere, plane, or disc); a fixed point is a point that goes into itself under the transformation. Since every linear transformation of the sphere has a fixed point, there are no cover transformations in case I, except the identity. Then ![]() is the same as
is the same as ![]() , and
, and ![]() is identical, as a Riemann surface, with the sphere. Case I can arise only when the given Riemann surface
is identical, as a Riemann surface, with the sphere. Case I can arise only when the given Riemann surface ![]() is equivalent to the sphere.
is equivalent to the sphere.
The points of ![]() over one point of
over one point of ![]() appear in the map as a system of points t equivalent under Γ. Such a system Σ has the property that any point of the system can be carried into any other by some transformation of Γ; and also, the image of any point of Σ by any transformation of Γ is another point of Σ (see p. 28). The uniform functions on
appear in the map as a system of points t equivalent under Γ. Such a system Σ has the property that any point of the system can be carried into any other by some transformation of Γ; and also, the image of any point of Σ by any transformation of Γ is another point of Σ (see p. 28). The uniform functions on ![]() , regular except for poles, appear, when expressed as functions of t, as automorphic functions attached to Γ. That is, functions z(t) which are invariant under the transformations of Γ:
, regular except for poles, appear, when expressed as functions of t, as automorphic functions attached to Γ. That is, functions z(t) which are invariant under the transformations of Γ:
where t* = (αt + β)/(γt + δ) is any transformation in the group Γ. The group Γ must be discontinuous; that is, a system of equivalent points under Γ can never have a limit point in the image domain. If we define a Riemann surface ![]() by taking the “points” of
by taking the “points” of ![]() to be the systems of equivalent points under Γ and by carrying the angular measure in the t-plane directly over to
to be the systems of equivalent points under Γ and by carrying the angular measure in the t-plane directly over to ![]() , then
, then ![]() is equivalent, as a Riemann surface, to the given
is equivalent, as a Riemann surface, to the given ![]() .
.
![]() is the most appropriate normal form into which every Riemann surface can be brought.
is the most appropriate normal form into which every Riemann surface can be brought.
In case 2, Γ must consist of entire linear transformations which have no finite fixed point. The only transformations satisfying this condition are the translations t′ = t + α. A discontinuous group of translations must be of one of the following types.41
(1) Γ contains only the identity. Then ![]() is identical with
is identical with ![]() , and
, and ![]() is equivalent to the plane (the “Simply punched” sphere, that is, the sphere without the north pole).
is equivalent to the plane (the “Simply punched” sphere, that is, the sphere without the north pole).
(2) Γ consists of the iterations of a single translation
![]()
then clearly ![]() is equivalent to the infinitely long right circular cylinder, and hence, by the Mercator projection, to the doubly punched sphere (the sphere without north and south poles).
is equivalent to the infinitely long right circular cylinder, and hence, by the Mercator projection, to the doubly punched sphere (the sphere without north and south poles).
(3) Γ will consist of the transformations

where α and β are translations in different directions. Then ![]() is closed; dt is a uniform differential, regular everywhere on
is closed; dt is a uniform differential, regular everywhere on ![]() , without any zeros, and hence
, without any zeros, and hence ![]() is a closed Riemann surface of genus one. Every such surface - whose type (but not its most general form) is the torus - admits in fact a uniformization by the integral of the first kind, by means of which the universal covering surface is mapped onto the plane.
is a closed Riemann surface of genus one. Every such surface - whose type (but not its most general form) is the torus - admits in fact a uniformization by the integral of the first kind, by means of which the universal covering surface is mapped onto the plane.
Aside from the few exceptions listed above (![]() = sphere, simply or doubly punched sphere, closed surfaces of genus one), case 3, in which the image domain is the open unit disc, always occurs. Since in general the periphery of the unit disc is a natural boundary (cut) for the automorphic functions of t which represent the functions on the base surface
= sphere, simply or doubly punched sphere, closed surfaces of genus one), case 3, in which the image domain is the open unit disc, always occurs. Since in general the periphery of the unit disc is a natural boundary (cut) for the automorphic functions of t which represent the functions on the base surface ![]() , one calls t a cut-circle uniformizing variable [Grenzkreis-Uniformisierende].
, one calls t a cut-circle uniformizing variable [Grenzkreis-Uniformisierende].
The group Γ is not determined uniquely by the given surface. For t may be replaced by any variable t′ obtained from t by a linear transformation T0 which preserves the open unit disc. This transforms Γ into the group
![]()
We introduce the following terminology. Any point t of the open unit disc is a “point of ![]() .” For the “straight lines in
.” For the “straight lines in ![]() ” we take the circular arcs in
” we take the circular arcs in ![]() which are orthogonal to the unit circle (the diameters of the unit disc are included in these “straight lines”). Any linear transformation preserving the open unit disc is a “motion in
which are orthogonal to the unit circle (the diameters of the unit disc are included in these “straight lines”). Any linear transformation preserving the open unit disc is a “motion in ![]() ”; two point sets in
”; two point sets in ![]() are “congruent” if one can be carried onto the other by a “motion.” The usual angular measure is retained. Then the complete Bolyai-Lobatschefsky geometry holds for these “points” and “straight lines.” That is the geometry whose axioms are the same as the axioms of Euclidean geometry, except that the parallel axiom is omitted.42 So we may call
are “congruent” if one can be carried onto the other by a “motion.” The usual angular measure is retained. Then the complete Bolyai-Lobatschefsky geometry holds for these “points” and “straight lines.” That is the geometry whose axioms are the same as the axioms of Euclidean geometry, except that the parallel axiom is omitted.42 So we may call ![]() the non-Euclidean plane. The complex variable t (restricted by the inequality | t | < 1) is to be regarded as a coordinate representing the points in the Lobatschefskian plane, in the same way that the rectangular Cartesian coordinates x, y, or their complex fusion z = x + iy, represent the points of the Euclidean plane. Any linear transformation of t which preserves the unit disc provides another equally valid coordinate system for the Lobatschefskian plane. In this interpretation, Γ now appears as a group of motions of the non-Euclidean plane; or, more precisely, as a representation of such a group by means of a definite coordinate t. If we replace t by t′ obtained from t by a linear transformation preserving the unit disc, then the new group Γ′ thus obtained is to be regarded as a different representation of the same group of motions of the non-Euclidean plane (with the aid of another coordinate t′). There are no rotations in Γ, that is, no motions of
the non-Euclidean plane. The complex variable t (restricted by the inequality | t | < 1) is to be regarded as a coordinate representing the points in the Lobatschefskian plane, in the same way that the rectangular Cartesian coordinates x, y, or their complex fusion z = x + iy, represent the points of the Euclidean plane. Any linear transformation of t which preserves the unit disc provides another equally valid coordinate system for the Lobatschefskian plane. In this interpretation, Γ now appears as a group of motions of the non-Euclidean plane; or, more precisely, as a representation of such a group by means of a definite coordinate t. If we replace t by t′ obtained from t by a linear transformation preserving the unit disc, then the new group Γ′ thus obtained is to be regarded as a different representation of the same group of motions of the non-Euclidean plane (with the aid of another coordinate t′). There are no rotations in Γ, that is, no motions of ![]() which leave some point of
which leave some point of ![]() fixed.
fixed.
Thus to every Riemann surface (aside from the four exceptions already listed) there corresponds a single uniquely determined discontinuous group Γ of motions of the Lobatschefskian plane; and Γ contains no rotations. Two Riemann surfaces are conformally equivalent (as Riemann expressed it, belong to the same class or are realizations of one and the same ideal Riemann surface) if and only if the associated groups of non-Euclidean motions are congruent in the sense of Lobatschefskian geometry. Conversely, to every rotation-free discontinuous group of non-Euclidean motions there corresponds a definite class of Riemann surfaces. (The surface ![]() constructed on page 169 will serve as a representative of this class.43)
constructed on page 169 will serve as a representative of this class.43)
To present a discontinuous group Γ of motions of the n-E plane44 in a more visual fashion, one uses, following Klein and Poincaré, a simple gapless covering of the plane by n-E congruent regions (fundamental regions) which are permuted by the motions of Γ. A dissection of this sort, which is as simple as possible, is provided by the following considerations.
Definition of n-E distance. Let t1 and t2 be any two distinct points in the open unit disc; join them by a n-E line, that is, a circular arc in the Gaussian t-plane which intersects the unit circle orthogonally at t∞1 and t∞2. This circular arc is uniquely determined by t1 and t2. The points on it are to come in the sequence t∞1, t1, t2, t∞2 (Fig. 12). The cross-ratio
has a positive real value > 1, and its real logarithm
![]()
Fig. 12. Non-Euclidean segment.
is positive, r (tl, t2) is invariant under all linear transformations preserving the unit disc. The n-E segment t1t2 is n-E congruent to another such segment ![]() if and only if
if and only if ![]() Furthermore, if the three points tl, t2, t3 lie in that order on an n-E line, then
Furthermore, if the three points tl, t2, t3 lie in that order on an n-E line, then
![]()
Because of these two facts, we shall speak of the number r (tl, t2) as the non-Euclidean distance between the points t1 and t2. Now we are in a position to measure not only angles but also distances in the n-E plane.
If ![]() is a system of equivalent points under Γ, if t0 is a single point of
is a system of equivalent points under Γ, if t0 is a single point of ![]() , and t an arbitrary point of the n-E plane, then because of the discontinuity of Γ there are only a finite number of points of
, and t an arbitrary point of the n-E plane, then because of the discontinuity of Γ there are only a finite number of points of ![]() whose distance45 from t does not exceed an arbitrary given number R. Thus among the points of
whose distance45 from t does not exceed an arbitrary given number R. Thus among the points of ![]() there is one or several (but certainly only a finite number) of points th such that the distance r(t, th) is the smallest distance of t from any point of
there is one or several (but certainly only a finite number) of points th such that the distance r(t, th) is the smallest distance of t from any point of ![]() . Then, as I shall express it briefly, t lies closest to th. If the distance r (t, th) is strictly less than the distance to all other points of
. Then, as I shall express it briefly, t lies closest to th. If the distance r (t, th) is strictly less than the distance to all other points of ![]() , then I can find a neighborhood of t such that every point of this neighborhood lies closest to th. Let th be any point of
, then I can find a neighborhood of t such that every point of this neighborhood lies closest to th. Let th be any point of ![]() ; I collect all those t which lie closest to th into a point set
; I collect all those t which lie closest to th into a point set ![]() with “center” th. The resulting sets
with “center” th. The resulting sets ![]() with all centers in
with all centers in ![]() , have disjoint interiors and cover the whole n-E plane. The transformation of Γ which carries t0 into th carries
, have disjoint interiors and cover the whole n-E plane. The transformation of Γ which carries t0 into th carries ![]() into
into ![]() ; hence
; hence ![]() is n-E congruent to
is n-E congruent to ![]() . To every point t there corresponds a point of
. To every point t there corresponds a point of ![]() which is equivalent to t under Γ; two distinct interior points of
which is equivalent to t under Γ; two distinct interior points of ![]() are never equivalent. Thus
are never equivalent. Thus ![]() has the properties of a fundamental region. Also,
has the properties of a fundamental region. Also, ![]() is convex; that is, if t′ and t″ are any two points of
is convex; that is, if t′ and t″ are any two points of ![]() . then all points of the n-E segment t′t″ joining t′ and t″ belong to
. then all points of the n-E segment t′t″ joining t′ and t″ belong to ![]() . The perpendicular bisector
. The perpendicular bisector ![]() of the segment t0th is the locus of points equidistant from t0 and th; to every th distinct from t0 we obtain such a line
of the segment t0th is the locus of points equidistant from t0 and th; to every th distinct from t0 we obtain such a line ![]() . The boundary of the closed set
. The boundary of the closed set ![]() is composed of segments of these lines; the interior of
is composed of segments of these lines; the interior of ![]() consists of those points which, for every
consists of those points which, for every ![]() , lie on the same side of
, lie on the same side of ![]() as t0. All points of the line
as t0. All points of the line ![]() have a distance
have a distance ![]() from t0, and there are only a finite number of the centers th whose distance from t0 does not exceed an arbitrarily given 2R. Hence it follows that only a finite number of segments on the boundary of
from t0, and there are only a finite number of the centers th whose distance from t0 does not exceed an arbitrarily given 2R. Hence it follows that only a finite number of segments on the boundary of ![]() has a distance ≤ R from the principal center t0. Thus
has a distance ≤ R from the principal center t0. Thus ![]() is a convex polygon, with a finite or infinite number of sides, whose vertices (that is, those points which are equidistant from three or more points of the system
is a convex polygon, with a finite or infinite number of sides, whose vertices (that is, those points which are equidistant from three or more points of the system ![]() ) have no limit point in the finite.
) have no limit point in the finite.
Following Fricke, ![]() is called a normal polygon belonging to the group Γ. The sides of the normal polygon are associated in pairs; either side of a pair can be carried onto the other by some motion in Γ. Two sides with a common vertex are never associated; for such a common vertex would have to be a fixed point of the motion carrying one side onto the other. These motions carrying one side of
is called a normal polygon belonging to the group Γ. The sides of the normal polygon are associated in pairs; either side of a pair can be carried onto the other by some motion in Γ. Two sides with a common vertex are never associated; for such a common vertex would have to be a fixed point of the motion carrying one side onto the other. These motions carrying one side of ![]() onto another (that is, the motions carrying
onto another (that is, the motions carrying ![]() onto a fundamental region
onto a fundamental region ![]() which abuts
which abuts ![]() along some side of
along some side of ![]() ) generate the group Γ. That is, every motion of Γ may be obtained by iterating and composing those particular motions. One proves this as follows. Join an arbitrary point th of
) generate the group Γ. That is, every motion of Γ may be obtained by iterating and composing those particular motions. One proves this as follows. Join an arbitrary point th of ![]() to t0 by a polygonal path which avoids the vertices of the polygonal decomposition {
to t0 by a polygonal path which avoids the vertices of the polygonal decomposition {![]() }. Now observe the succession of polygons in this decomposition through which the polygonal path passes. Suppose there are in all e polygons
}. Now observe the succession of polygons in this decomposition through which the polygonal path passes. Suppose there are in all e polygons ![]() equivalent to
equivalent to ![]() (including
(including ![]() itself) which meet at the vertex 1 of
itself) which meet at the vertex 1 of ![]() . Then there are exactly e centers to which 1 lies closest, and there are e points of
. Then there are exactly e centers to which 1 lies closest, and there are e points of ![]() which are equivalent to 1 under Γ; or, in the terminology of Poincaré, which constitute a cycle of vertices of the polygon
which are equivalent to 1 under Γ; or, in the terminology of Poincaré, which constitute a cycle of vertices of the polygon ![]() . The sum of the angles in
. The sum of the angles in ![]() at the vertices of such a cycle is the full angle 1 (= 360°).
at the vertices of such a cycle is the full angle 1 (= 360°).
The Riemann surface ![]() (p. 169) belonging to the group Γ is obviously closed if and only if there exists a positive number R such that for every point in the n-E plane there is at least one equivalent point under Γ whose n-E distance from the center t0 is ≤ R. Then every point has a distance ≤ R from the closest point in the system
(p. 169) belonging to the group Γ is obviously closed if and only if there exists a positive number R such that for every point in the n-E plane there is at least one equivalent point under Γ whose n-E distance from the center t0 is ≤ R. Then every point has a distance ≤ R from the closest point in the system ![]() ; in particular,
; in particular, ![]() is completely contained in the n-E disc of radius R about t0. Since the vertices of
is completely contained in the n-E disc of radius R about t0. Since the vertices of ![]() cannot have a limit point in the finite, there are, in this case, only a finite number of such vertices :
cannot have a limit point in the finite, there are, in this case, only a finite number of such vertices : ![]() has finitely many sides. Let the number of sides of
has finitely many sides. Let the number of sides of ![]() , which must be even because of the pairing of the sides, be 2s; let c denote the number of distinct vertex cycles of
, which must be even because of the pairing of the sides, be 2s; let c denote the number of distinct vertex cycles of ![]() , so that c is also the sum of the angles in
, so that c is also the sum of the angles in ![]() . We wish to show that the genus p of this closed Riemann surface may be computed from s and c by the simple formula
. We wish to show that the genus p of this closed Riemann surface may be computed from s and c by the simple formula
![]()
Since every cycle contains at least three vertices, we have
Therefore 12p − 6 is an upper bound for 2s, the number of sides or vertices of a normal polygon.
We choose t0 = 0. The (n-E as well as Euclidean) linear segments joining 0 to the vertices of ![]() separate
separate ![]() into 2s triangles. This provides a triangulation of
into 2s triangles. This provides a triangulation of ![]() into 2s triangles with 3s edges and c + 1 vertices. Then, from the most basic formula of combinatorial topology, the genus p is in fact determined by the equation
into 2s triangles with 3s edges and c + 1 vertices. Then, from the most basic formula of combinatorial topology, the genus p is in fact determined by the equation
![]()
In this book we have adopted the methodological attitude of avoiding boundaries as much as possible, and we have operated with coverings by overlapping neighborhoods rather than with dissections into simple pieces of surface. The appeal here to combinatorial topology would introduce a foreign element. Therefore, instead of this topological proof of the equation (21.3), I prefer a function theoretic proof. It runs as follows.
We take a meromorphic differential dz on the closed surface ![]() . As we know, its order is 2p − 2. We shall assume for the moment that none of the zeros or poles of dz lie on the sides of
. As we know, its order is 2p − 2. We shall assume for the moment that none of the zeros or poles of dz lie on the sides of ![]() . Consider the analytic function dz/dt of t in the region
. Consider the analytic function dz/dt of t in the region ![]() . Being a convex polygon, is simply connected, and one of the simplest consequences of the Cauchy integral theorem in function theory says that the increase in the azimuth of dz/dt, in tracing the boundary of
. Being a convex polygon, is simply connected, and one of the simplest consequences of the Cauchy integral theorem in function theory says that the increase in the azimuth of dz/dt, in tracing the boundary of ![]() , is equal to the number of zeros less the number of poles of dz/dt in the interior of
, is equal to the number of zeros less the number of poles of dz/dt in the interior of ![]() ; hence it is = 2p − 2. To determine the increase of the azimuth of dz/dt in tracing the boundary, consider a side σ = t1 t2 = AB of
; hence it is = 2p − 2. To determine the increase of the azimuth of dz/dt in tracing the boundary, consider a side σ = t1 t2 = AB of ![]() and its equivalent side
and its equivalent side ![]() where the second comes from
where the second comes from
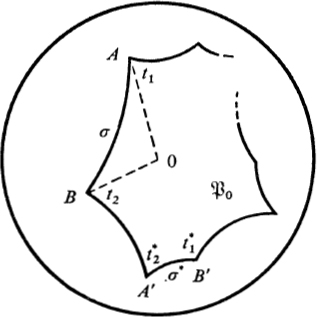
Fig. 13. Determination of the genus from the normal polygon.
the first by the substitution t* = tS of the group Γ. This substitution S carries the polygon ![]() into an equivalent one which abuts on
into an equivalent one which abuts on ![]() along the side
along the side ![]() . If, in tracing
. If, in tracing ![]() in the positive sense, the segment σ is traced from t1 to t2, then the segment σ* will be traced in the sense
in the positive sense, the segment σ is traced from t1 to t2, then the segment σ* will be traced in the sense ![]() Since dz is invariant under the substitution S, the sum of the contributions of these two segments to the increase of the azimuth is equal to the difference
Since dz is invariant under the substitution S, the sum of the contributions of these two segments to the increase of the azimuth is equal to the difference
Here ![]() denotes the negative of the angle (measured in Euclidean fashion) through which the tangent to σ = AB turns when this side is traced in the positive sense from A to B. This angle is positive and =
denotes the negative of the angle (measured in Euclidean fashion) through which the tangent to σ = AB turns when this side is traced in the positive sense from A to B. This angle is positive and = ![]() minus the sum of the angles of the n-E triangle 0AB. In this way we get, for the desired increase in the azimuth of dz/dt when the boundary of
minus the sum of the angles of the n-E triangle 0AB. In this way we get, for the desired increase in the azimuth of dz/dt when the boundary of ![]() is traced in the positive sense, the value
is traced in the positive sense, the value
![]()
and the equation claimed, 2p − 2 = s − c + 1, follows.
It is inherent in the situation that one cannot completely avoid bordered regions in a dissection into equivalent fundamental regions, but the boundaries here are simple enough to be grasped easily.
If dz has zeros or poles on the boundary of ![]() , then one can proceed in one of two ways. Either one cuts out disc neighborhoods of these zeros and poles and later lets the radii tend to zero, or one avoids this unpleasant eventuality by a suitable choice of the center t0. If t = a is a zero or pole of dz which lies on the mid-line of
, then one can proceed in one of two ways. Either one cuts out disc neighborhoods of these zeros and poles and later lets the radii tend to zero, or one avoids this unpleasant eventuality by a suitable choice of the center t0. If t = a is a zero or pole of dz which lies on the mid-line of ![]() , that is, if t0 and
, that is, if t0 and ![]() have the same distance from a, then t0 has the same distance from a as from aS− 1. So one need only choose t0 such that it does not lie on any of the mid-lines associated with a pair of distinct but equivalent zeros or poles of dz; then it is certain that no point a lies on the boundary of the normal polygon with center t0. Since only a finite number of these mid-lines come within an n-E distance of the origin ≤ a given R, this is certainly possible. Finally, one can bring the point t = t0 into the point t = 0 by a suitable n-E motion and thus make t = 0 the center of
have the same distance from a, then t0 has the same distance from a as from aS− 1. So one need only choose t0 such that it does not lie on any of the mid-lines associated with a pair of distinct but equivalent zeros or poles of dz; then it is certain that no point a lies on the boundary of the normal polygon with center t0. Since only a finite number of these mid-lines come within an n-E distance of the origin ≤ a given R, this is certainly possible. Finally, one can bring the point t = t0 into the point t = 0 by a suitable n-E motion and thus make t = 0 the center of ![]() .
.
The dissection of the n-E plane into normal polygons furnishes not only a visualization of the n-E group of motions, but also a means of constructing such groups directly.46
In the group Γ of motions of the non-Euclidean plane (or in the associated manifold ![]() ) we meet the purest embodiment of the concept of a Riemann surface, freed of all accidental properties. To crown the whole development of this part of Riemannian function theory, the solution of the following problem would be desired. Given a Riemann surface in its normal form (that is, the associated group of motions of the non-Euclidean plane), to express each of the uniform or many-valued unbranched functions on the surface by means of a closed analytic formula in terms of the coordinate t of the points in the Lobatschefskian plane. The
) we meet the purest embodiment of the concept of a Riemann surface, freed of all accidental properties. To crown the whole development of this part of Riemannian function theory, the solution of the following problem would be desired. Given a Riemann surface in its normal form (that is, the associated group of motions of the non-Euclidean plane), to express each of the uniform or many-valued unbranched functions on the surface by means of a closed analytic formula in terms of the coordinate t of the points in the Lobatschefskian plane. The ![]() -series introduced by Poincaré47 constitute an important attack on the solution of this problem. If the given group Γ which preserves the open unit disc consists of the substitutions
-series introduced by Poincaré47 constitute an important attack on the solution of this problem. If the given group Γ which preserves the open unit disc consists of the substitutions
then, for example,

are Poincaré ![]() -series. To establish the uniform absolute convergence of these series, take an ordinary disc κ of radius a: |t − t0 | ≤ a about an arbitrary point t0 ( | t0 | < 1) so small that the equivalent discs κSi are mutually disjoint. The surface integral, Ji, of
-series. To establish the uniform absolute convergence of these series, take an ordinary disc κ of radius a: |t − t0 | ≤ a about an arbitrary point t0 ( | t0 | < 1) so small that the equivalent discs κSi are mutually disjoint. The surface integral, Ji, of
over κ is the (Euclidean) area of κSi; consequently, ![]() is convergent. If the Euclidean distance from t to t0 satisfies | t − t0 | ≤ a/2, then by (12.16)
is convergent. If the Euclidean distance from t to t0 satisfies | t − t0 | ≤ a/2, then by (12.16)
Therefore
is uniformly convergent in the neighborhood of t = t0. Also,
holds uniformly for | t | ≤ q < 1, for the equivalent points ![]() condense only on the boundary of the unit disc; the uniform absolute convergence of the two series,
condense only on the boundary of the unit disc; the uniform absolute convergence of the two series, ![]() , and
, and ![]() ′ follows. At t = 0, and at all equivalent points under Γ,
′ follows. At t = 0, and at all equivalent points under Γ, ![]() has a pole of order 1; otherwise
has a pole of order 1; otherwise ![]() is regular. At the same points
is regular. At the same points ![]() ′ has poles of order 3 and is regular everywhere else. From the equation
′ has poles of order 3 and is regular everywhere else. From the equation
it follows that ![]() (t)(dt)2 goes into itself under an arbitrary transformation Si of the group
(t)(dt)2 goes into itself under an arbitrary transformation Si of the group
![]()
Similarly,
![]()
Hence ![]() (t)/
(t)/![]() ′(t) is an automorphic function relative to the group Γ; it is not identically zero, but is has a zero of order 2 at t = 0 (and at every equivalent point). In short, it is a uniform nonconstant function, without essential singularities, on the ground surface
′(t) is an automorphic function relative to the group Γ; it is not identically zero, but is has a zero of order 2 at t = 0 (and at every equivalent point). In short, it is a uniform nonconstant function, without essential singularities, on the ground surface ![]() .
.
The examples of ![]() -series given here are of dimension − 4. Poincaré succeeded (by using n-E instead of Euclidean area) in proving48 the absolute convergence of
-series given here are of dimension − 4. Poincaré succeeded (by using n-E instead of Euclidean area) in proving48 the absolute convergence of ![]() -series of dimension − r, for r > 2. Once a Riemann surface is given in its normal form, one might hope, on the basis of Poincaré’s attack, that one could succeed in deriving all the theorems on the existence of functions and integrals on the surface with the aid of analytic formulae. This would be the analog of what has long been possible in the case p = 1 with the theory of elliptic functions. Perhaps one would prefer then to construct Riemannian function theory as follows : with the aid of the Dirichlet principle or a competing method derive, not the existence of functions and integrals, but only the existence of the cut-circle uniformizing variable; then construct the functions and differentials by explicit formulae with this uniformizing variable as argument. The recent extensive investigations of H. Petersson are aimed in this direction. The difficulty lies in the limit passage from r > 2 to r = 2. The structural form of the Poincaré series does not appear to furnish an adequate foundation for this process; Petersson reaches his goal only through a new device of regarding the
-series of dimension − r, for r > 2. Once a Riemann surface is given in its normal form, one might hope, on the basis of Poincaré’s attack, that one could succeed in deriving all the theorems on the existence of functions and integrals on the surface with the aid of analytic formulae. This would be the analog of what has long been possible in the case p = 1 with the theory of elliptic functions. Perhaps one would prefer then to construct Riemannian function theory as follows : with the aid of the Dirichlet principle or a competing method derive, not the existence of functions and integrals, but only the existence of the cut-circle uniformizing variable; then construct the functions and differentials by explicit formulae with this uniformizing variable as argument. The recent extensive investigations of H. Petersson are aimed in this direction. The difficulty lies in the limit passage from r > 2 to r = 2. The structural form of the Poincaré series does not appear to furnish an adequate foundation for this process; Petersson reaches his goal only through a new device of regarding the ![]() -series as eigenfunctions of certain functionals.49 In spite of the tremendous advance attained by Petersson, it seemed advisable to me to retain, in this book, the independent construction of all functions and differentials by means of the Dirichlet principle.
-series as eigenfunctions of certain functionals.49 In spite of the tremendous advance attained by Petersson, it seemed advisable to me to retain, in this book, the independent construction of all functions and differentials by means of the Dirichlet principle.
§ 22. The conformal mapping of a Riemann surface onto itself
We say that a group of motions of the n-E plane contains infinitesimal transformations if there exist motions in the group which differ arbitrarily little from the identity. A discontinuous group of motions, say Γ, certainly contains no infinitesimal transformations. Also the converse of this theorem is true.
An n-E group of motions is discontinuous if and only if it contains no infinitesimal motions.
To prove this we use, as before, the complex coordinate t. In general, a linear transformation T : t → t* has two fixed points on the t-sphere, τ′ and τ″; then the transformation may be written50

the constant μ is called the multiplier of T. If T preserves the open unit disc, then there are two possibilities: (1) either τ′ and τ″ both lie on the circumference of the unit disc, and μ is positive (hyperbolic transformation); or (2) τ′ and τ″ are inverse points relative to the unit circle, and τ′ is interior to the same; then | μ | = 1 (elliptic transformation). In the n-E plane, T is a rotation about τ′, and the real number ϕ, determined to within an additive integer by the equation μ = ex(ϕ), is the angle of rotation of T.
The parabolic transformations insert themselves as the trasnitional case between the hyperbolic and elliptic transformations. A parabolic transformation has only one fixed point, τ′. If it preserves the open unit disc, then it has the form

We base our proof on the following lemma.
Lemma. Let
![]()
be two sequences of points, in the n-E plane, which converge to the same point t0 (| t0 | < 1). Let Tn be an n-E motion which carries tn into ![]() . If there exists a neighborhood of t0 which contains no fixed point of any of the motions Tn(n = 1,2,3,…), then Tn converges to the identity.
. If there exists a neighborhood of t0 which contains no fixed point of any of the motions Tn(n = 1,2,3,…), then Tn converges to the identity.
Let ![]() (|
(| ![]() | ≤ 1) and
| ≤ 1) and ![]() be the two fixed points of Tn (they may coincide); then there is a positive number l such that
be the two fixed points of Tn (they may coincide); then there is a positive number l such that

holds for all n. If I set
![]()
then I can assume that

for all n. Then every one of the four differences
![]()
is > l. If Tn is not parabolic, then it has the form

If I set t = tn, and thus t* = ![]() , in here, I get
, in here, I get


In place of (22.3) I can write

for every linear substitution with the fixed point ![]() must be of this form. Also if the transformation Tn is parabolic, I can put it in the form (22.5); in this case μn = 1 and (22.4) certainly holds. We get the limit equation
must be of this form. Also if the transformation Tn is parabolic, I can put it in the form (22.5); in this case μn = 1 and (22.4) certainly holds. We get the limit equation
![]()
If again we set t = tn and t* = ![]() now in (22.5), we find
now in (22.5), we find
Finally, if we bring (22.5) into its natural form
we get the values

which differ from the corresponding coefficients in the identity substitution

by less than
![]()
This completes the proof of the lemma.
Now let Γ* be an n-E group of motions, without infinitesimal transformations, and let τ be a fixed point in the n-E plane of some rotation belonging to Γ*. By Sτ I denote all rotations in Γ* which have the fixed point τ; they form a group in themselves. If I normalize the angles of rotation ϕ of the Sτ by the condition 0 ![]() ϕ < 1, then, because of the lack of infinitesimal transformations, there exists one of the Sτ, say
ϕ < 1, then, because of the lack of infinitesimal transformations, there exists one of the Sτ, say ![]() , with the smallest angle of rotation ϕ0 > 0. The angle of rotation of every Sτ is an integral multiple of ϕ0; for otherwise, by appropriate choice of the integer k, one could generate a transformation Sτ (
, with the smallest angle of rotation ϕ0 > 0. The angle of rotation of every Sτ is an integral multiple of ϕ0; for otherwise, by appropriate choice of the integer k, one could generate a transformation Sτ (![]() )−k with a smaller angle of rotation than
)−k with a smaller angle of rotation than ![]() . Thus
. Thus ![]() is a “primitive” transformation in the group of the Sτ; all the others are obtained as powers of
is a “primitive” transformation in the group of the Sτ; all the others are obtained as powers of ![]() . If one determines the integer h by the condition
. If one determines the integer h by the condition
![]()
then clearly (![]() )h+1 has a smaller angle of rotation, (h + 1)ϕ0 − 1, than
)h+1 has a smaller angle of rotation, (h + 1)ϕ0 − 1, than ![]() , unless hϕ0 = 1. Therefore ϕ0 = 1/h must hold, and h is the order of the finite cyclic group (Sτ) which consists of the rotations
, unless hϕ0 = 1. Therefore ϕ0 = 1/h must hold, and h is the order of the finite cyclic group (Sτ) which consists of the rotations
![]()
The fixed points of the rotations in Γ* can have no limit point in the finite. If τ (| τ | < 1) were such a limit point and if

were a sequence of primitive rotations in Γ*, with distinct fixed points τn which converged to τ, then there would be two a priori possibilities.
(1) The orders hn are bounded for all n. Then there would be infinitely many of the Sn which have the same order h; let them be the transformations ![]() . Then
. Then ![]() is infinitesimal for infinitely large n. Therefore this case is ruled out.
is infinitesimal for infinitely large n. Therefore this case is ruled out.
(2) The orders hn are not bounded. Then one can choose a subsequence ![]() of the Sn such that the associated orders tend to ∞ and the angles of rotation tend to zero. But that also would contradict the absence of infinitesimal operations in Γ*.
of the Sn such that the associated orders tend to ∞ and the angles of rotation tend to zero. But that also would contradict the absence of infinitesimal operations in Γ*.
Having settled this, we can now show that a system of equivalent points, under Γ*, can have no limit point in the finite. Suppose that t0 (| t0 | < 1) were the limit of a sequence of equivalent points tn (n = 1, 2, 3, …):
![]()
Let Sn be the motion of Γ* which carries tn into tn+1. I pick a neighborhood ![]() of t0 which, with the possible exception of t0 itself, contains no fixed point of a rotation in Γ*. By the lemma, the fixed point
of t0 which, with the possible exception of t0 itself, contains no fixed point of a rotation in Γ*. By the lemma, the fixed point ![]() (|
(| ![]() | ≤ 1) of Sn can lie outside of
| ≤ 1) of Sn can lie outside of ![]() for only finitely many n. Therefore we must have
for only finitely many n. Therefore we must have ![]() = t0 for n ≥ n0; it is no restriction to assume that n0 = 1. Then all tn result from t1 by rotations about t0, which are contained in Γ*; but by such rotations I can carry t1 into only finitely many different positions. Thus the possibility of a limit point is contradicted, and the proof of the theorem stated at the beginning of § 22 is complete.
= t0 for n ≥ n0; it is no restriction to assume that n0 = 1. Then all tn result from t1 by rotations about t0, which are contained in Γ*; but by such rotations I can carry t1 into only finitely many different positions. Thus the possibility of a limit point is contradicted, and the proof of the theorem stated at the beginning of § 22 is complete.
With this preparation out of the way, we arrive at the real object of this final section of our exposition. We are concerned with the one-to-one conformal maps of a Riemann surface ![]() onto itself. These maps form a group; the significance of this group for the theory of the Riemann surface
onto itself. These maps form a group; the significance of this group for the theory of the Riemann surface ![]() is obviously analogous to that, for example, of the group of motions for metric geometry. Therefore when we formulate the following theorem, due in essence to Klein, we are stating a fact of fundamental importance.
is obviously analogous to that, for example, of the group of motions for metric geometry. Therefore when we formulate the following theorem, due in essence to Klein, we are stating a fact of fundamental importance.
The group of conformal maps of a Riemann surface onto itself is always discontinuous, except for the following seven exceptional cases: ![]() = complete sphere, simply or doubly punched sphere, a disc on the sphere [literally, “skull cap on the sphere”], a punched disc (i.e., a disc without its center), a zone on the sphere (between two circles of latitude51), a closed Riemann surface of genus one.
= complete sphere, simply or doubly punched sphere, a disc on the sphere [literally, “skull cap on the sphere”], a punched disc (i.e., a disc without its center), a zone on the sphere (between two circles of latitude51), a closed Riemann surface of genus one.
Proof.52 Let ![]() denote the universal covering surface over
denote the universal covering surface over ![]() , let t be the cut-circle uniformizing variable which maps
, let t be the cut-circle uniformizing variable which maps ![]() conformally onto the open unit disc, and let Γ be the group of n-E motions belonging to the Riemann surface
conformally onto the open unit disc, and let Γ be the group of n-E motions belonging to the Riemann surface ![]() . The cases in which the t-sphere or the infinite t-plane, instead of the unit disc, arises may be ignored; our theorem is obviously invalid in those cases (exceptional cases 1, 2, 3, 7). Let C be a conformal map of
. The cases in which the t-sphere or the infinite t-plane, instead of the unit disc, arises may be ignored; our theorem is obviously invalid in those cases (exceptional cases 1, 2, 3, 7). Let C be a conformal map of ![]() onto itself which carries the point
onto itself which carries the point ![]() into
into ![]() . Let
. Let ![]() be a point of
be a point of ![]() over
over ![]() ,
, ![]() a point of
a point of ![]() over
over ![]() . Because of the simple connectivity of
. Because of the simple connectivity of ![]() , there exists a single topological map
, there exists a single topological map ![]() of
of ![]() onto itself such that:
onto itself such that:
(1) ![]() goes into
goes into ![]() , and
, and
(2) every point ![]() on
on ![]() goes into a point
goes into a point ![]() , whose trace point
, whose trace point ![]() is the image under C of the trace
is the image under C of the trace ![]() of
of ![]() .
.
![]() is also conformal, and therefore appears in the t-plane as a linear transformation T, which preserves the open unit disc; also T carries any system of equivalent points under Γ into a system of the same sort. This last fact is expressed by the equation
is also conformal, and therefore appears in the t-plane as a linear transformation T, which preserves the open unit disc; also T carries any system of equivalent points under Γ into a system of the same sort. This last fact is expressed by the equation
![]()
which states that T and Γ commute; or, for every substitution S in Γ, the “transform” TST−1 also belongs to Γ. Conversely, it is also clear that every linear substitution T that commutes with Γ, and which carries |t| < 1 onto itself, furnishes a conformal map of ![]() onto itself. Obviously, the set of motions of the n-E plane which commute with Γ form a group, Γc, which contains Γ as a subgroup. The discontinuity of this group Γc is to be proved; by the theorem at the beginning of this section, it suffices to demonstrate the absence of infinitesimal operations in Γc.
onto itself. Obviously, the set of motions of the n-E plane which commute with Γ form a group, Γc, which contains Γ as a subgroup. The discontinuity of this group Γc is to be proved; by the theorem at the beginning of this section, it suffices to demonstrate the absence of infinitesimal operations in Γc.
If S and T are any two linear transformations preserving the open unit disc, then the two points which T throws into the fixed points of S are the fixed points of the transformation
![]()
If S′ has the same fixed points as S, then either T must carry each of the fixed points of S into itself (that is, if S is not parabolic, T must have the same fixed points as S; if S is parabolic, at least one of the fixed points of T must coincide with the fixed point of S); or T must interchange the two fixed points σ′ and σ″ of the (nonparabolic) transformation S, that is, T must carry σ′ into σ″ and σ″ into σ′. As is clear from (22.2), a parabolic transformation cannot accomplish this last; a nonparabolic T(22.1) can accomplish it only if μ2 = 1, μ = − 1, and T is an elliptic transformation with rotation angle ![]() . Thus it is possible for S and T to commute
. Thus it is possible for S and T to commute
![]()
only if
I. both transformations S and T are nonparabolic and have the same fixed points, or
II. both transformations S and T are parabolic and have the same fixed point, or
III. S and T are elliptic transformations with angles of rotation = ![]() , or
, or
IV. one of the two transformations, S and T, is the identity.
If Γ consists of only the identity, then ![]() is conformally equivalent to the open unit disc, or a disc on the sphere (exceptional case 4).
is conformally equivalent to the open unit disc, or a disc on the sphere (exceptional case 4).
Now let S be an arbitrary substitution in Γ, distinct from the identity. Assume that, contrary to our claim, there is a sequence of operations Tn ≠ 1 in in Γc, such that Tn converges to the identity. Then both ![]() and
and ![]() would be elements of Γ. Along with Tn, the last of these operations converges to the identity as n tends to infinity. But since Γ contains no infinitesimal transformations, it must be that
would be elements of Γ. Along with Tn, the last of these operations converges to the identity as n tends to infinity. But since Γ contains no infinitesimal transformations, it must be that
![]()
holds for n ≥ n0; that is, S and Tn commute. We have listed four cases in which this is possible, but since S is not elliptic, only cases I and II remain in question. If we apply this result to all possible operations S ≠ 1 of the group Γ, we find that only two possibilities remain open:
I. All operations in Γ are hyperbolic and have the same two fixed points, which one may assume are + i and − i.
II. All operations in Γ are parabolic and have the same fixed point, which we may take to be + i.
(CASE I). The map
carries the open unit disc in the t-plane onto the parallel strip − π/2 < y < + π/2 in the z = (x + iy)-plane; Γ goes into a group of translations parallel to the x-axis ; that is, Γ takes the form

Then
![]()
maps ![]() one-to-one onto the annulus
one-to-one onto the annulus
![]()
and by stereographic projection this may be turned into a zone on the sphere with the equator for its mid-line (exceptional case 6).
(CASE II.) The map

carries the open unit disc in the t-plane into the upper half-plane y > 0, and Γ into a group of translations parallel to the x-axis. So again Γ has the form (22.6) and w = eiaz carries ![]() onto the punched unit disc in the w-plane:
onto the punched unit disc in the w-plane:
![]()
With this our principal theorem is completely proved; at the same time we have had the opportunity to observe the applicability of the normal form ![]() of the Riemann surface through an important example. It is trivial that in each of the seven excluded cases there is a continuous group of conformal maps of the surface onto itself. It is also easy to describe these groups completely.
of the Riemann surface through an important example. It is trivial that in each of the seven excluded cases there is a continuous group of conformal maps of the surface onto itself. It is also easy to describe these groups completely.
A closed Riemann surface of genus p > 1 admits only a finite number of conformal maps onto itself.53 For a system of equivalent points under this group can have no limit point on the closed surface, and therefore contains only a finite number of points.
1)See Weierstrass, Werke, 2, 49–54, ϋber das sog. Dirichletsche Prinzip (1870).
2) H. A. Schwarz: ϋber einen Grenzübergang durch alternierendes Verfahren, Gesammelte Abh., Vol. II, 133–143; ϋber die Integration der partiellen Differential-gleichung Δu = 0 unter vorgeschriebenen Grenz-und Unstetigkeits-Bedingungen, ibid., 144–171; Zur Integration der partiellen Differentialgleichung Δu = 0, ibid., 175–210. C. Neumann: Ber. Sächs. Akad. d. Wiss. Leipzig, 1870; Vorlesungen über Riemann’s Theorie der Abelschen Integrate, 2nd edition, Leipzig 1884, 388–471. Among the more recent literature I mention in particular the following two works of C. Carathéodory: Elementarer Beweis für den Fundamentalsatz der konformen Abbildung, in the Festschrift zum 50jährigen Doktorjubiläum von H. A. Schwarz, Berlin 1914, 19–41; Conformal Representation, Cambridge Tracts in Math., 28, 1932.
3)See the two papers, ϋber das Dirichletsche Prinzip, in Hilbert’s Gesammelte Abh., 3, Berlin 1935,10–14 and 15–37; and also his paper, Zur Theorie der konformen Abbildung, ibid., 73–80. The second was originally published in the Festschrift zur Feier des 150jährigen Bestehens der Gesellschaft der Wissenschaftenzu Göttingen, 1901, and was reprinted in Math. Ann., 59 (1904). The other two originated in 1905 and 1909.
4)I cite here particularly the following early works which appeared before the first edition of this book: B. Levi, Sulprincipio di Dirichlet, Rend. Circ. Mat. Palermo,22 (1906) 293–360; G. Fubini, II principio di minimo e i teoremi di esistenza per i problemi al contorno relativi alle equazione alle derivate parziali di ordini pari, ibid.,23 (1907) 58–84; H. Lebesgue, Sur le probleme de Dirichlet, ibid., 24 (1907) 371–402; S. Zaremba, Sur le principe du minimum, Bull, de l’Ac. des sciences de Cracovie, July 1909, 206fF; R. Courant, ϋber die Methode des Dirichletschen Prinzips, Math. Ann., 72 (1912) 517–550. What I give here, essentially unchanged, is the proof that I developed in 1913 on the basis of the work of Hilbert, B. Levi, and Zaremba; the attack is simpler than that of Riemann and Hilbert. The proof incorporates the modifications which are the natural consequence of Dieudonne’s improved method of surface integration. Since that time a rich literature on the subject has accumulated. Through Courant, among others, the “direct methods of the calculus of variations” has come to be a familiar term in analysis. For a comprehensive presentation we refer to Courant’s book on the Dirichlet principle, already mentioned in the preface.
5)Gesammelte Abhandlungen, 2, 186–198.
6)J. Hadamard, Sur le principe de Dirichlet, Bull. Soc. math. France, 34 (1906) 135–139. S. Zaremba, loc. cit., 206ff.
7) The Schwarz inequality gives
![]()
where ![]() . The rest follows from the Bessel inequality corresponding to the annulus (q, 1):
. The rest follows from the Bessel inequality corresponding to the annulus (q, 1):
8)The presentation in Klein’s monograph of 1882, already cited, is based on these and similar physical considerations. The diagrams of streams in that monograph are very instructive.
9)Sul principio di Dirichlet, Rend. Circ. Mat. Palermo, 22 (1908) 293–360, §7. For the method under discussion see H. Weyl, The method of orthogonal projection in potential theory, Duke Math. Jour., 7 (1940) 411–444.
10)Let it be permitted here that we use the bar to mean something other than the passage from a complex number to its conjugate.
11)Our proof is closely related to that given by Zaremba in his paper cited above.
12) The “shrunken block” terminology was introduced in §10: Bθ(![]() ): |x | ≤ θb, | y | ≤ θb.
): |x | ≤ θb, | y | ≤ θb.
13) It would have been quite possible, and might have even meant a simplification, to consider only Riemann surfaces and harmonic and Abelian differentials. Then h would have been introduced as the number of linearly independent everywhere regular harmonic differentials. Instead, we subsumed Riemann surfaces under smooth oriented surfaces. I make this remark with regard to the tendency in the literature, sometimes explicit, to construct the theory of Riemann surfaces “without topology.” For example, see L. Bieberbach, Über die Einordnung des Hauptsatzes der Uniformisierung in die Weierstrasssche Funktionentheorie, Math. Ann., 78 (1918) 312–331. I can see neither difficulties nor any particular profit in this.
14) Earlier it was customary to derive these symmetry laws (following Riemann and C. Neumann) by integrating around the boundary of the canonically cut surface. Our normalization of the elementary integrals renders this dissection superfluous. I regard this as an essential improvement of the method.
15) See Riemann, Theorie der Abelschen Funktionen, Werke (2nd edition), p. 140, and especially Appell, Journal de mathematiques, 3. ser., 9 (1883), and Acta Mathematica, 13 (1890).
16) This terminology comes from the arithmetic theory of algebraic functions of Hensel and Landsberg; see Hensel and Landsberg, Theorie der algebraischen Funktionen einer Variablen, Leipzig, 1902.
17) Riemann considered only the so-called “general” case (R = p in our notation). The complete result for integral divisors ![]() is due to G. Roch, Jour. f. Math., 64 (1865) 372–376. Fractional divisors were considered by Klein (Riemannsche Flächen I, autograph lectures, Göttingen 1892, pp. 110–111), E. Ritter, Math. Ann., 44 (1894) 314, and Hensel and Landsberg loc. cit., pp. 362–364.
is due to G. Roch, Jour. f. Math., 64 (1865) 372–376. Fractional divisors were considered by Klein (Riemannsche Flächen I, autograph lectures, Göttingen 1892, pp. 110–111), E. Ritter, Math. Ann., 44 (1894) 314, and Hensel and Landsberg loc. cit., pp. 362–364.
18) Compare the references to Klein and Hensel-Landsberg in the preceding footnote. E. Ritter, loc. cit., argues as follows. If f0 = ![]() ′/
′/![]() is one function which is a multiple of 1/
is one function which is a multiple of 1/![]() (
(![]() ′ integral), then I obtain all such functions f as follows: f = f0f′, f′ a multiple of 1/
′ integral), then I obtain all such functions f as follows: f = f0f′, f′ a multiple of 1/![]() ′, and thus I come back to the case of an integral divisor
′, and thus I come back to the case of an integral divisor ![]() ′. But here the proof that [if B + (m + 1 − p) > 0] an f0 exists is lacking.
′. But here the proof that [if B + (m + 1 − p) > 0] an f0 exists is lacking.
19) The last method is also available on open Riemann surfaces and yields here immediately the proof that there exist functions on the surface which are not constant.
20) A. Brill and M. Noether, Math. Ann., 7 (1874) 283.
21) K. Weierstrass, Mathematische Werke, Vol. 4, Vorlesungen über die Theorie der Abelschen Transzendenten, Berlin, 1902, pp. 224–225.
22) Riemann, Theorie der Abelschen Funktionen, Jour. f. Math., 54 (1857) = Werke, 2nd ed., pp. 88–142; Über das Verschwinden der Theta-Funktionen, Jour. f. Math., 65 (1865) = Werke, pp. 212–224. Weierstrass, Vorlesungen über die Theorie der Abelschen Transzendenten, Werke Vol. 4. Stahl, Theorie der Abelschen Funktionen Leipzig 1896. H. F. Baker, Abel's theorem and the allied theory, including the theory of theta functions, Cambridge 1897. Prym and Rost, Theorie der Prymschen Funktionen erster Ordnung, Leipzig 1911, 2. Teil, 7. Abschnitt. Krazer, Lehrbuch der Thetafunktionen, Leipzig 1903.
The significance principal of the inversion problem to us today lies primarily, not in its intrinsic value, but in the splendid developments created by Riemann and Weierstrass in their efforts to solve the problem.
23) Jour. f. Math., 70 (1869) 354–362; 71 (1870) 223–236, and 305–315. See the work of Appell cited on page 133, and also the following. Prym and Rost, Theorie der Prymschen Funktionen erster Ordnung, Leipzig 1911; R. König, Zur arithmethischen Theorie der auf einem algebraischen Gebilde existierenden Funktionen, Ber. d. Verh. Sächs. Ges. Wiss. Leipzig, math.-phys. Kl., 63 (1911) 348–368; O. Haupt, Zur Theorie der Prymschen Funktionen, Math. Ann., 77 (1915) 24–64.
24) First formulated by E. Ritter, Math. Ann., 44, p. 314. (See also the footnote on page. 137). Instead of the symbolism of divisors, Ritter uses the theory of forms on Riemann surfaces, founded by Klein, which makes possible a real representation of divisors with the aid of multiplicative forms. In Math. Ann., 47 (1896) 157–221, aided by the basic theorems introduced into the theory of linear differential equations by Riemann, he generalizes his investigations to systems of n forms which transform in a homogeneous linear way under the influence of a cover transformation S.
25) In case p = 1, X is not present (p. 143); in case p = 2, X consists of a single character system ![]() s0.
s0.
26) Abel’s theorem [developed in splendid simplicity in the short note, Démonstration d’une propriété générate d’une certaine classe de fonctions transcendentes, Jour. f. Math., 4 (1829) 200–201 = Œuvres complètes, nouvelle édition (1881), 1, pp. 515–517] is more general, in that it concerns not only integrals of the first kind. A paper of Abel, Mémoire sur une propriété générate d’une classe très-étendue de fonctions transcendentes, on this subject, which he submitted to the Paris Academy in 1826, was lost for a long time because of Cauchy’s carelessness; it was first published after Abel’s death: Mémoires présentés par divers savants, 7 (1841) = Abel, Œuvres completes, nouvelle édition (1881), 1. pp. 145–241. Furthermore, the theorem is contained in the manuscript left by Abel, Sur la comparaison des fonctions transcendentes, Œuvres complètes, 2, pp. 55–66. The converse of Abel’s theorem for integrals of the first kind may be read between the lines in Riemann; it was first stated explicitly (without completely adequate proof) by Clebsch, Jour. f. Math., 63 (1864) 198; Clebsch used it for all it was worth in the theory of algebraic curves.
27) See Weierstrass, Werke, 4, pp. 451–456.
28) See the fourth chapter in Krazer, Lehrbuch der Thetafunktionen, Leipzig 1903, where references to the other literature may be found.
29) The z-plane with finitely many points deleted becomes a simply connected surface if one draws linear cuts from these points to infinity. Riemann’s monodromy problem is concerned with a far-reaching generalization of algebraic functions (the meromorphic functions on an n-sheeted Riemann surface over the z-sphere). It asks for a system of n functions analytic in the slit plane, and the functions are to be related across the slits by given linear substitutions. (A side condition ruling out essential singularities must be added.) Hilbert, Grundzüge einer allgemeinen Theorie der Integralgleichungen, Leipzig 1912, 81–108 and S. J. Plemelj, Riemannsche Funktionenscharen mit gegebener Monodromiegruppe, Monatsh. f. Math. u. Physik, Jahrg., 19, 211–245, demonstrated the solvability of the monodromy problem. Then Robert König developed a complete theory of these “Riemann transcendentals,” including the exact analog of the reciprocity laws of § 16. See in particular the following works of König: Die Reduktions- und Reziprozitäts-Theoreme bei den Riemannschen Transzendenten, Math. Ann., 79 (1918) 76–135 (where one also finds his earlier work developed); Die Integrate der Riemannschen Transzendenten, Math. Ann., 80 (1919) 1–28; Die Elementartheoreme bei den Riemannschen Transzendenten, Math. Zeit., 15 (1922) 26–65. See also, R. König and M. Kraft, Über Reihenentwicklung analytischer Funktionen, Jour. f. Math., 154 (1935) 154–173; ibid., Über Primfunktionen, Jour. f. Math., 165 (1931) 96–107. On this foundation is based the work of H. Schmidt, Über multiplikative Funktionen und die daraus entspringenden Differentialsysteme, Math. Ann., 105 (1931) 325–380, and, in most recent times, H. Röhrl, Differentialsysteme, welche aus multiplikativen Klassen mit exponentiellen Singularitaten entspringen, I, Math. Ann., 123 (1951) 53–75; II, ibid., 124 (1952) 187–218; III, ibid., 125 (1953) 448–466. Further: Funktionenklassen auf geschlossenen Riemannschen Flächen, Math. Nachr., 6 (1952) 355–384; Die Elementartheoreme der Funktionenklassen auf geschlossenen Riemannschen Flächen, ibid., 7 (1952) 65–84; Über gewisse Verallgemeinerungen der Abelschen Integrate, ibid., 9 (1953) 23–44.
30) Prym espoused this point of view in his work from 1869 on; here the work of Dedekind, cited on page 33, on elliptic modular functions, from the year 1877, is pertinent.
31) See the author’s article, Topologie und abstrakte Algebra als zwei Wege mathematischen Verständnisses, in Unterrichtsblätter f. Math. u. Naturwiss., 38 (1932) 177–188.
The sketch of the theory of algebraic functions, which we could give here, is very incomplete. From the older literature, which preceded the development of modem abstract algebra, I mention here, besides the works of Riemann, Weierstrass, F. Klein, C. Neumann, H. F. Baker, and Hensel-Landsberg already cited, the following presentations: Clebsch and Gordan, Theorie der Abelschen Funktionen, Leipzig 1866; A Brill and M. Noether, Über die algebraischen Funktionen und ihre Anwendung in der Geometrie, Math. Ann., 7 (1874) 269–310; Brill and Noether, Die Entwicklung der Theorie der algebraischen Funktionen, Bericht der DMV, 3, Berlin 1894; F. Severi, Lezione di Geometria algebrica, Padova 1908 (as representative of the very fruitful Italian school of algebraic geometers). In all of these works the curve-theoretic point of view predominates. A trail-blazing and classical work for the algebraic-arithmetic foundations of the theory is: R. Dedekind and H. Weber, Theorie der algebraischen Funktionen einer Veränderlichen, Jour. f. Math., 92 (1882) 181–290, (also contained in H. Weber, Algebra, v. Ill, 2nd edition, Braunschweig 1908, p. 623ff.). Also, F. Klein, Riemannsche Flächen I, II, autograph lectures, Göttingen 1892/93. Appell et Goursat, Theorie des fonctions algébriques, Paris 1895. H. F. Baker, Analytic principles of the theory of curves, Cambridge 1933. The first steps in the domain of algebraic functions with arbitrary fields of constants (including those with prime characteristic) were due to H. Hasse, Theorie der Differentiate in algebraischen Funktionenkörpern mit vollkommenem Konstantenkörper, Jour. f. Math., 172 (1943) 55–64, F. K. Schmidt, Zur arith-metischen Theorie der algebraischen Funktionen, I, Math. Zeit., 41 (1936) 415, and André Weil, Zur algebraischen Theorie der algebraischen Funktionen, Jour. f. Math., 179 (1938) 129–133. A modern overall presentation is that of Claude Chevalley, Introduction to the theory of algebraic functions of one variable, Math. Surveys No. 6, Am. Math. Soc., New York 1951.
32) For Poincaré, see, besides the numerous notes in the Comptes Rendus for the years 1881/82, the papers in the Acta Mathematica, Vols. 1, 3, 4, 5 (1882/84). For Klein, see the papers in Math. Ann., Vols. 19, 20, 21 (1882/83), and also the inclusive presentation: Fricke and Klein, Vorlesungen über die Theorie der automorphen Funktionen, Leipzig 1897 to 1912.
33) H. Poincaré, Sur l’uniformisation des fonctions analytiques, Acta Math., 31 (1907) 1-63. P. Koebe, ϋber die Uniformisierung beliebiger analytischer Kurven. Nachr. d. Ges. Wiss. Göttingen, from 1907 on.
34) I give here the titles and places of publication of the larger series of his works; these were frequently announced in shorter notes in the Nachrichten der Gesellschaft der Wissenschaften zu Göttingen and the Sitzungsberichte der Sächsischen Akademie der Wissenschaften zu Leipzig.
(a) ϋber die Uniformisierung der algebraischen Kurven, I, II, III (first proof of the general fundamental theorem of Klein, the iteration procedure), IV (second existence proof for the general canonical uniformizing variable: method of continuity), Math. Ann., 67 (1909) 145–224 ; 69 (1910) 1–81; 72 (1912) 437–516; 75 (1914) 42-129.
(b) ϋber die Uniformisierung beliebiger analytischer Kurven, I. Teil: Das allgemeine Uniformisierungsprinzip; II Teil: Die zentralen Uniformisierungsprobleme, Jour. f. Math., 138 (1910) 192–253, and 139 (1911) 251–292.
(c) Abhandlungen zur Theorie der konformen Abbildung. I. Die Kreisabbildung des allgemeinsten einfach und zweifach zusammenhängenden schlichten Bereichs und die Ränder Zuordnung bei konformer Abbildung, Jour. f. Math., 145 (1915) 177–223. II. Die Fundamentalabbildung beliebiger mehrfach zusammenhängender schlichter Bereiche nebst einer Anwendung auf die Bestimmung algebraischer Funktionen zu gegebener Riemannscher Fläche, Acta Math., 40 (1916) 251-290. III. Der allgemeine Fundamentalsatz der konformen Abbildung nebst einer Anwendung auf die konforme Abbildung der Oberfläche einer körperlichen Ecke, Jour. f. Math., 147 (1917) 67-104. IV. Abbildung mehrfach zusammenhängender schlichter Bereiche auf Schlitzbereiche, Acta Math., 41 (1918) 305-344. V. Fortsetzung, Math. Zeit., 2 (1918) 198-236. VI. Abbildung mehrfach zusammenhängender Bereiche auf Kreisbereiche. Uniformisierung hyperelliptischer Kurven, Math. Zeit., 7 (1920) 235-301.
(d) Riemannsche Mannigfaltigkeiten und nichteuklidische Raumformen, acht Mitteilungen; Sitzber. Akad. Berlin, 1927, 164–196; 1928, 345–384 and 385–442; 1929, 414–457; 1930, 304–364 and 505–541; 1931, 506–534; 1932, 249–284. Also the prize winning monograph of 1920, first published in Acta Math., 50 (1927) 27–157, Allgemeine Theorie der Riemannschen Mannigfaltigkeiten.
See also Koebe’s survey lectures: ϋber ein allgemeines Uniformisierungsprinzip, Int. Math. Cong. Rome, Atti (1909) 25–30; Referat über automorphe Funktionen und Uniformisierung, Jahresber. DMV 21 (1912) 157-163; Methodender konformen Abbildung und Uniformisierung, Math. Congr. Bologna, Atti, 3 (1928) 195–203.
Of the more recent literature, the following should be noted especially: B. L. van der Waerden, Topologie und Uniformisierung der Riemannschen Flächen, Ber. Sächs. Ak. Wiss. Leipzig, math.-phys. Kl., 93 (1941) 147–160; and R. Nevanlinna’s book, Uniformisierung, Berlin 1953.
35) Zur Theorie der konformen Abbildung, Nachr. Ges. Wiss. Göttingen, 1909, 314–323.
36) ϋber die Hilbertsche Uniformisierungsmethode, Nachr. Ges. Wiss. Göttingen, 1910, 61–65.
37) All the required conditions are satisfied if we use the function

38) All the demands are satisfied by [see footnote 37] :
![]()
39) See particularly P. Koebe, ϋber die Uniformisierung beliebiger analytischer Kurven, erster Teil; Das Allgemeine Uniformisierungsprinzip, Jour. f. Math., 138 (1910) 192–253.
40) H. A. Schwarz, Gesammelte Abhandlungen, Vol. II, pp. 109-111. The application of this lemma to our problem goes back to Poincare, Acta Math., 4 (1884) 23–232.
41)That the three cases listed exhaust the possibilities follows from the process of the adaptation of a (two-dimensional) number lattice relative to a sublattice. See page 89 of this book or G. Kowalewski, Die komplexen Veränderlichen und ihre Funktionen, Leipzig 1911, pp. 57 f.
42)The model of the plane non-Euclidean geometry which presents itself here is intimately related to the model, discovered by Klein in the year 1871, which is based on Cayley’s metric. Klein, Über die sogenannte Nicht-Euklidische Geometrie, Math. Ann., 4 (1871) 573-625. See also Fricke and Klein, Vorlesungen über die Theorie der automorphen Funktionen, Vol. I, Leipzig 1897, pp. 3-59. The book of Bonola gives a good orientation on non-Euclidean geometry: Non-Euclidean geometry: a critical and historical study of its developments, English translation by H. S. Carslaw, Dover Pubs., 1955 (originally published 1911)
43)See the final remarks in Koebe’s first communication Über die Uniformisierung beliebiger analytischer Kurven, Göttinger Nachrichten, 1907, 209–210.
44) n-E = non-Euclidean
45) The word “distance,” and all other geometric expressions, are to be understood, until further notice, in the n-E sense.
46) Besides the normal polygons, also the “canonical polygons,” whose theory was developed by Fricke (Fricke-Klein, Vorlesungen über die Theorie der automorphen Funktionen, Leipzig, 1897–1912) are of great importance. With their aid, Fricke succeeded in formulating and proving rigorously the theorem which had already been stated by Riemann: the Riemann surfaces of genus p ( >1) form a (6p ‒ 6)-dimensional manifold. These matters are intimately connected with the “method of continuity,” by means of which Klein and Poincaré attempted to prove, simultaneously at the beginning of the 1880’s, the uniformizibility of algebraic forms. See in particular P. Koebe, Math. Ann., 75 (1914) 42–129.
47) Poincaré, Mémoire sur les fonctions fuchsiennes, Acta Math., 1 (1882) 207.
48) For a brief formulation of this proof see H. Petersson: Abh. Math. Sem. Univ. Hamburg, 16 (1948) 127–130; and, in more detail, Über den Bereich absoluter Konvergenz der Poincaréschen Reihen, Acta Math., 80 (1948) 23–63. See also: Über die Transformationsfaktoren der relativen Invarianten linearer Substitutionsgruppen, Monatsh. f. Math., 53 (1949) 17’41.
49) Automorphe Formen als metrische Invarianten, Vols. I and II, Math. Nachr., 1 (1948) 158–212 and 218–257; Über Weierstrass-Punkte und die expliziten Darstellungen der automorphen Formen von reeller Dimension, Math. Zeit., 52 (1949) 32–59.
50) If τ″ = ∞, this becomes
![]()
51) These constitute according to the breadth of the zone, infinitely many essentially differenr Riemann surfaces.
52) This is Poincaré’s proof: Acta Math. 7 (1885) 16–19. To be sure, Poincaré considers only closed Riemann surfaces; but his proof, word for word, remains valid for open surfaces.
53) For this more special theorem, first stated by H. A. Schwarz, there exist other more algebraic proofs. One of Weierstrass (1875), which was first published in 1895 (Werke, Vol. II, pp. 235–244) ; one of M. Noether (Math. Ann., 20, pp. 59–62 and 21, pp. 138–140; 1882); and one of A. Hurwitz, Math. Ann., 41 (1893) 403–411.