In this section we shall present a method for computing the dominant eigenvalue or eigenvalues of an n × n matrix A. To take the most useful case, we shall assume that A is real. In scientific and engineering applications, we are typically interested in finding the real and the complex eigenvalues of a real matrix. Our analysis could readily be extended to matrices with complex components. In Section 7.10 we will show how to compute the smaller eigenvalues.
A real matrix A has a characteristic polynomial det (λI − A) with real coefficients. Therefore, the eigenvalues of A occur as real numbers or as complex-conjugate pairs, λ and ![]() . For clarity, we shall suppose that the eigenvalues λ1, λ2, . . . , λn of A are distinct, so that A has n linearly independent eigenvectors u1, u2, . . . , un. (Without difficulty the reader will be able to generalize this analysis, using either the Jordan form of A or an expansion in principal vectors, as in Section 7.6.)
. For clarity, we shall suppose that the eigenvalues λ1, λ2, . . . , λn of A are distinct, so that A has n linearly independent eigenvectors u1, u2, . . . , un. (Without difficulty the reader will be able to generalize this analysis, using either the Jordan form of A or an expansion in principal vectors, as in Section 7.6.)
Let ![]() . The dominant eigenvalues are defined to be the eigenvalues ot greatest absolute value. We shall consider only two cases.
. The dominant eigenvalues are defined to be the eigenvalues ot greatest absolute value. We shall consider only two cases.
Real case. Here we suppose that A has a single real eigenvalue λ1 of maximum absolute value. We allow λ1 to be either positive or negative. Thus,
Complex case. Here we suppose that A has the complex-conjugate dominant eigenvalues
Other cases are possible but unusual, and we ignore them. For example, A could have the dominant eigenvalues +1 and −1. Or A could have the five dominant eigenvalues λk = −7 exp (2kπi/5) (k = 1, . . . , 5). Observe that, in both of these examples, the translation λk → λk + 1, caused by adding 1 to each diagonal element of A, produces eigenvalues λk + 1 which fall into the real case (1), or the complex case (2).
In the real case (1), we pick an initial vector x0 and form the iterates x1 = Ax0, x2 = Ax1, . . . . If x0 has the expansion
then the iterate xk has the expansion
where, since ![]() for all
for all ![]() .
.
We suppose that ξ1 ≠ 0. This supposition is almost surely correct if x0 is picked in some bizarre way, e.g.,
Then for large k, as (5) shows,
For large k, successive vectors are approximately multiples of each other, i.e., they are approximately eigenvectors:
In the complex case (2), the iterates xk = Akx0 do not approximate eigenvectors as k → ∞.
The eigenvalues are λ1 = 1 + i, λ2 = 1 − i. The iterates x0, x1,. . . are
The vector xk+l is found by rotating xk through 450 and multiplying the length by ![]() .
.
In general, let x0 have an eigenvector expansion (3). Even though we are computing complex eigenvalues λ1 and ![]() we will use only real numbers until the last step. We pick for x0 a real vector such as the vector defined by (7). The iterate xk has the eigenvector expansion (4). Let
we will use only real numbers until the last step. We pick for x0 a real vector such as the vector defined by (7). The iterate xk has the eigenvector expansion (4). Let
Since ![]() for v > 2, the expansion (4) yields
for v > 2, the expansion (4) yields
where rk → 0 as k → ∞. Since A and xk are real, we may assume that ![]() and that the eigenvectors u1 and u2 are complex conjugates. We assume that ξ1 ≠ 0. Note that, for all k, since u1 and u2 are independent,
and that the eigenvectors u1 and u2 are complex conjugates. We assume that ξ1 ≠ 0. Note that, for all k, since u1 and u2 are independent,
![]()
where ![]() . Therefore, we have the asymptotic form
. Therefore, we have the asymptotic form
In the complex case for large k, successive vectors xk do not become multiples of each other. For large k, the vectors xk lie approximately in the plane spanned by the independent eigenvectors u1 and u2. Therefore, successive triples xk, xk+1, xk+2 are almost dependent. Explicitly, if α and β are the real coefficients of the quadratic
then, for all k, ![]() , and hence
, and hence
The asymptotic form (14) now yields the approximate equation
If we can find the coefficients of dependence α and β we can compute λ1 and λ2 as the roots of the quadratic (15):
Since λ1 and λ2 are complex, α2 – 4β < 0.
EXAMPLE 2. In Example 1, Since λ1 = 1 + i and λ2 = 1 − i are the only eigenvalues, the iterates (11) satisfy
Here α = –2, β = 2, (λ − λ1)(λ − λ2) = λ2 − 2λ + 2.
Computing procedure. In practice, we are given an n × n real matrix A; we assume that we have either the real case (1) or the complex case (2), but we do not know which. If we have the real case, we must compute λ1; if we have the complex case, we must compute λ1 and ![]()
Begin with the vector x = x0 defined, say, by (7). Compute the first iterate y = Ax. Now make a least-squares fit of x to y, i.e., choose the real number λ to minimize
Setting the derivative with respect to λ equal to zero, we find the value
Define a small tolerance ![]() > 0, for example,
> 0, for example, ![]() = 10−5. If the quantities x, y, and λ satisfy
= 10−5. If the quantities x, y, and λ satisfy
we conclude that we have the real case, and we assign the value λ to λ1.
If the test (21) is failed, we compute the third iterate, z = Ay. Pick the real numbers α and β which minimize
Calculus gives the necessary conditions
The optimal values α and β are found from (23) to be
If the quantities x,y, z, α, β satisfy
we conclude that we have the complex case, and we assign the root values (18) to λ1 and λ2.
Suppose that both the real test (21) and the complex test (25) are failed. Then we must iterate further. If we form the iterates Akx without some scaling, we may eventually obtain numbers too large or too small for the floating-point representation. The last computed iterate was z = A2x. We scale z by dividing z by the component zm of largest absolute value. We then define
We now repeat the preceding process: We form y = Ax and make the real test (21). If that test is failed, we form z = Ay and make the complex test (25). If the complex test is also failed, we define a new vector x by (26), etc. If ![]() is not too small, one of the tests ultimately will be passed. Scaling does not affect the asymptotic equation for xk = x, xk+1 = y, and xk+2 = z:
is not too small, one of the tests ultimately will be passed. Scaling does not affect the asymptotic equation for xk = x, xk+1 = y, and xk+2 = z:
![]()
because the equation is homogeneous. The sequence of scaled vectors x; y, z; x, y, z;. . . is simply
![]()
where σ1, σ2,. . . are nonzero scalars.
The method of iteration suffers very little from rounding error. If a new x is slightly in error, we may simply regard this x as a new initial vector which is, no doubt, better than the previous initial vector. Rounding error affects the accuracy of the computed eigenvalues only in the last stage of the computation, when x is fitted to y, or when x and y are fitted to z.
The reader may have wondered why, if we are computing eigenvalues, we do not simply find the coefficients of the characteristic polynomial φ(λ) = det (λI − A). Then the eigenvalues λj could be found by some numerical method for solving polynomial equations ![]() Indeed, this is sometimes done. But unless an extremely efficient method such as that of Householder and Bauer (see Section 7.12) is used, there is a large rounding error from the extensive computations needed to obtain the n coefficients of
Indeed, this is sometimes done. But unless an extremely efficient method such as that of Householder and Bauer (see Section 7.12) is used, there is a large rounding error from the extensive computations needed to obtain the n coefficients of ![]() from the n2 components of A. Even for n = 5 or 6 the rounding error may be quite large.
from the n2 components of A. Even for n = 5 or 6 the rounding error may be quite large.
Moreover, a root λj of ![]() depends unstably on the coefficients if
depends unstably on the coefficients if ![]() is small. Infinitesimal variations dc1. . . , dcn in the coefficients produce the variation dλ according to the formula of calculus:
is small. Infinitesimal variations dc1. . . , dcn in the coefficients produce the variation dλ according to the formula of calculus:
![]()
Since ![]() we find
we find
1. Show what happens when the method of iteration is applied to
What are the coordinates of the vectors xk for k = 760, 761, 762, 763 ?
2. Suppose that A has a simple eigenvalue λi which is known to be approximately equal to −1.83. Form the matrix B = (A + 1.83I)−1, and apply the method of iteration to B. What is the dominant eigenvalue of B ? How can you compute λi?
3. Suppose that the real matrix A has distinct eigenvalues. Suppose that two of the eigenvalues, λi and ![]() are known to be approximately equal to 1 ± i. Form the real matrix
are known to be approximately equal to 1 ± i. Form the real matrix
![]()
How can the method of iteration be used to compute λj and ![]() ?
?
4. Let ![]() . Define the rate of convergence to be the reciprocal of the asymptotic value ve for the number of iterations needed to reduce the error by the factor 1/e. Show that, for the method of iteration,
. Define the rate of convergence to be the reciprocal of the asymptotic value ve for the number of iterations needed to reduce the error by the factor 1/e. Show that, for the method of iteration,
![]()
5. Let A be a real, symmetric, positive-definite matrix with the eigenvalues λ1 > λ2 > ... > λn. Suppose that we have computed numerical values for λ1 and for a corresponding unit eigenvector u1. If y ≠ a multiple of u1, form
![]()
The vector x0 is nonzero and is (apart from rounding error) orthogonal to u1. If there were no rounding error and if u1 were exact, show that the method of iteration, applied to x0, would produce the second eigenvalue, λ2. Explain why rounding error causes the method of iteration, applied to x0, to produce the dominant eigenvalue, λ1, again.
6. In formula (24), the denominator
![]()
equals zero if and only if the vectors x and y are dependent, as we saw in the proof of the Cauchy-Schwarz inequality. Why are the vectors x and y independent whenever formula (24) is applied in the method of iteration ?
7. Let A be a real, symmetric matrix, with eigenvalues ![]() .
.
Let λ be any number satisfying the test for a real eigenvalue:
![]()
Prove that, for some eigenvalue λj,
![]()
Thus, ![]() represents an upper bound for the proportional error. (Expand x in terms of unit orthogonal eigenvectors u1, . . . , un.)
represents an upper bound for the proportional error. (Expand x in terms of unit orthogonal eigenvectors u1, . . . , un.)
8.* Let A be an n × n matrix with independent unit eigenvectors u1, . . . , un. Let T be the matrix with columns u1, . . .,un. If
![]()
prove that, for some eigenvalue λ j,
![]()
Use the inequality
![]()
In the last section we supposed that A was an n × n real matrix with real and complex eigenvalues λl . . . , λn. We showed how to compute either a dominant real eigenvalue, λ1, satisfying
or a dominant complex-conjugate pair, ![]() , satisfying
, satisfying
We will now show how to obtain from A a reduced matrix R whose eigenvalues are the remaining eigenvalues of A. The method of iteration for dominant eigenvalues, when applied to R, yields one or two smaller eigenvalues of A. The matrix R then can be reduced further to a matrix R′, etc., until all the eigenvalues of the original matrix A have been computed.
In the real case (1) the method of iteration yielded quantities λ = λ1, x, and y = Ax satisfying
apart from a negligible error. Suppose for the moment that
Form the nonsingular n × n matrix
We will show that
where the (n − 1) × (n − 1) matrix R has the required property
The numbers * in the top row of (6) are irrelevant.
To prove (6), multiply (5) on the left by A. Since Ax = λ1x and Aej = aj, the jth column of A, we find
The matrix B = T−lAT satisfies the equation TB = AT. If the columns of B are b1, . . . , bn, then the columns of TB are Tb1, . . . , Tbn. By (8), the equation TB = AT implies
Since x is the first column of T, the solutionof the equation Tbl = λ1x is
Therefore, B = T −lAT has the form (6). The identity (7) follows by taking the characteristic determinants of the matrices on both sides of (6):
Recalling the invariance (see Theorem 1, Section 4.2)
we find from (11) the identity
Division of both sides of (13) by λ − λ1 yields the required result (7). Note that I in the expression λI − R, is the identity of order n − 1.
To compute R, we verify that
Indeed, since x1 = 1, the matrix (14) times the matrix (5) equals I. Since R comprises the elements in i, ![]() in the product T −1 AT, we have
in the product T −1 AT, we have
where X consists of the rows ![]() of T −1, and Y consists of the columns
of T −1, and Y consists of the columns ![]() of T. Explicitly,
of T. Explicitly,
Therefore,
which yields R = (rij) in the explicit form
Now we shall eliminate the assumption that 1 = x1 = max | xi |. This assumption was convenient because it insured that the matrix T, denned by (5), was nonsingular and because it produced no large numbers xi + 1 in the final formula (18). Given A, λ1, and x ≠ 0, we will find a new A and a new x satisfying Ax = λ1x such that the new A has the same eigenvalues as the old A, and such that the new x does satisfy 1 = x1 = max | xi |. Let
Since x ≠ 0, we have xm ≠ 0. The vector u satisfies
Let Pij be the matrix which permutes components i and j of a vector. For example, if n = 3,

Pij is the matrix formed by interchanging rows i and j of the identity matrix. Note that
Note also that APij is formed by interchanging columns i and j in A; PijA is formed by interchanging rows i and j in A.
Referring to (20), we see that υ = Plm u is a vector with maximal component υ1 = 1. Further,
But, by (21), PAP = P−l AP, which has the same eigenvalues as A. Thus, we define
The new matrix A and the new vector x have all the required properties, including (4). Note that the new A is formed from A by interchanging rows 1 and m and interchanging columns 1 and m. The reduced matrix R is then computed directly from formula (18).
In the complex case (2), the method of iteration yielded real quantities α, β, x, y = Ax, and z = Ay satisfying
We know that x and y are independent because in the testing procedure of the preceding section, the numbers α and β were computed only after the failure of an attempt to express y as a scalar multiple of x ≠ 0. For the moment assume that x and y have the special forms
The coefficients α, β satisfy
We will find an (n − 2) × (n − 2) matrix R whose eigenvalues are λ3, . . ., λn.
Define the n × n matrix
Since Ax = y and Ay = z = − βx − αy,
The matrix B = T −lAT satisfies TB = AT. If b1, ... are the columns of B, then by (28)
By (27) we conclude that bl and b2 have the forms
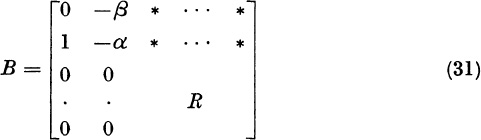
Therefore, B = T −lAT has the form
The numbers * are irrelevant. Because of the zeros below the 2 × 2 block in the upper-left corner,
Because B is similar to A, B has the same characteristic determinant. Therefore (32) implies
The identity λ2 + αλ + β = (λ − λ1)(λ − λ2) now gives
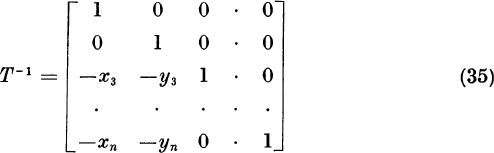
To compute R, we verify that
Indeed, since x and y have the special forms (25), the matrix (35) times the matrix (27) equals I. Since R consists of the elements in rows ![]() and columns
and columns ![]() of the product T−lAT, we have
of the product T−lAT, we have
where X consists of the rows ![]() of T−l, and Y consists of the columns
of T−l, and Y consists of the columns ![]() of T. Explicitly,
of T. Explicitly,
Therefore,
which yields R = (rij) in the explicit form
Suppose now that x, y = Ax, and z = Ay satisfy the dependence (24) but that x and y do not have the special form (25). Then x and y are independent vectors satisfying
Here [xy] represents the n × 2 matrix with columns x and y. Let N and Q be nonsingular n × n and 2 × 2 matrices. By (40),
Set
Suppose further that the vectors x′, y′ have the special form
In analogy to (27), let T′ be the n × n matrix
Equation (41) states that
where the 2 × 2 matrix S is denned in (42). Note that
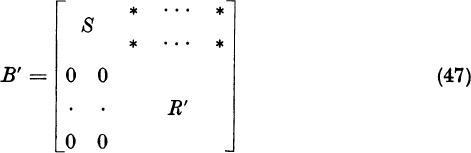
By analogy to (31), B′ = (T′)−l A′ T′ has the form
Therefore,
But B′ is similar to A′, which is similar to A. Therefore,
Dividing (48) by (λ − λ1)(λ − λ2), we find
Therefore, R′ is the required reduced matrix. By analogy to (39), we have the explicit form R′ = (r′ij), with
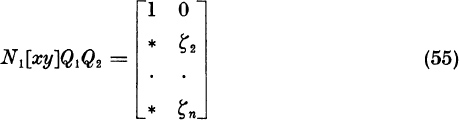
It remains only to find an n × n matrix N and a 2 × 2 matrix Q such that N [xy]Q = [x′y′], where x′, y′ have the form (43). Let
Define ![]() . Define N1 = P1m, the matrix which permutes the first and wth components. Then we have the form
. Define N1 = P1m, the matrix which permutes the first and wth components. Then we have the form
Let Q2 be a 2 × 2 matrix which subtracts η times the first column from the second column:
Then, by (53), we have the form
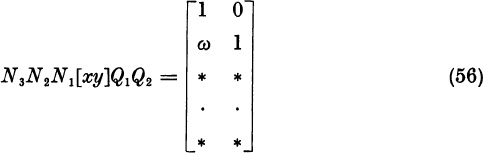
Let ![]() ; this maximum is positive because the two columns (55) remain independent. Let N2 = P2k, and let N3 divide row 2 by ζk. Then we have the form
; this maximum is positive because the two columns (55) remain independent. Let N2 = P2k, and let N3 divide row 2 by ζk. Then we have the form
Explicitly, N3 = diag ![]() . Let Q3 subtract ω times column 2 from column 1:
. Let Q3 subtract ω times column 2 from column 1:
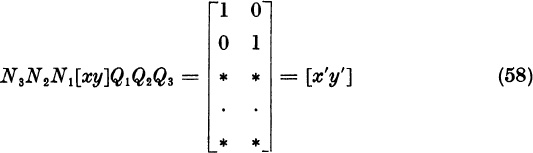
Then we obtain x′, y′
There is no need to obtain N = N3N2N1 and Q = Q1Q2Q3 explicitly, but we must obtain A′ = NAN−1 explicitly to compute the reduced matrix R′ from (51). We have
since ![]() . Formula (59) gives the following procedure. Begin with A. Interchange columns 1 and m. Interchange rows 1 and m. Interchange columns 2 and k. Interchange rows 2 and k. Divide row 2 by ζk. Multiply column 2 by ζk. The result is A′. Since the vectors x′,y′ were given by (58), we can now compute the reduced matrix from (51).
. Formula (59) gives the following procedure. Begin with A. Interchange columns 1 and m. Interchange rows 1 and m. Interchange columns 2 and k. Interchange rows 2 and k. Divide row 2 by ζk. Multiply column 2 by ζk. The result is A′. Since the vectors x′,y′ were given by (58), we can now compute the reduced matrix from (51).
Although the analysis has been long, the explicit computations (58), (59), (51) are very brief. Therefore, double precision can be used with a negligible increase in computing time. In any case, rounding error is reduced by the choice of the maximal pivot-elements xm and ζk.
1. Let
This matrix has the simple eigenvalue λ1 = 4, with the eigenvector x = col (1, 1, 1). Find the 2 × 2 reduced matrix R.
2. Let
This matrix has the simple eigenvalue λl = −1, with the eigenvector x = col (0, 3, 10). Find the 2 × 2 reduced matrix R.
3. Let
Verify that A2x − 4Ax + 5x = 0. Compute two complex-conjugate eigenvalues. Using formula (51), compute the l × l reduced matrix R. First perform the transformations (58) and (59).
4. Let x and Ax be independent; let x, Ax, and A2x be dependent:
![]()
If λ2 + αλ + β ≡ (λ − λ1)(λ − λ2), show that (A − λ2I)x is an eigenvector belonging to λ1
5. Let
Verify that x, Ax, and A2x are dependent. Compute two complex eigenvalues, and form the 2 × 2 reduced matrix, R. Then compute the other two eigenvalues of A.
Some methods for computing the eigenvalues of an n × n matrix A depend upon finding the coefficients cj of the characteristic polynomial
The eigenvalues are then found by some numerical method for computing the roots of polynomial equations.
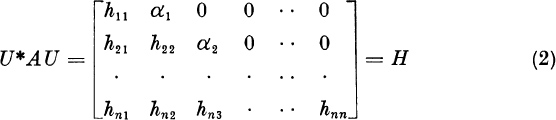
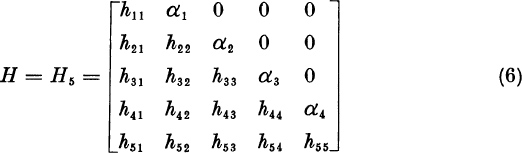
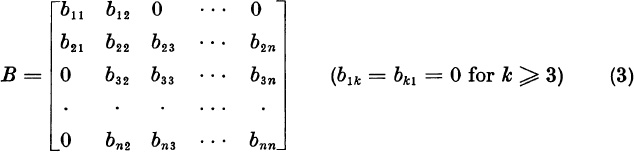
In the method of Householder and Bauer, to be presented in the next section, given A, we construct a unitary matrix U such that the similar matrix U* AU has the special form
This is the Hessenberg form, with
In particular, if A is Hermitian, then H is Hermitian. A Hermitian Hessenberg matrix H is tridiagonal, with ![]() .
.
The reduction (2) is useful if there is an easy way to find the coefficients of the characteristic polynomial of a Hessenberg matrix, since the identities U*AU = H, U*U = I imply
The purpose of this section is to show how to find the coefficients cj of the characteristic polynomial of a Hessenberg matrix H. As a by-product, we shall show how to find an eigenvector belonging to a known eigenvalue of H. We also will show, in the Hermitian case, that the eigenvalues can be located in intervals without any numerical evaluation of the roots of the characteristic equation.
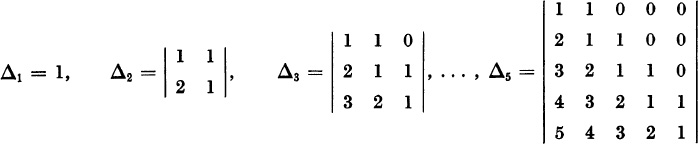
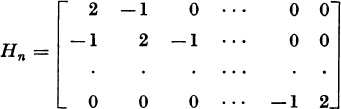
Given H = Hn, construct the sequence of Hessenberg matrices
Let Δ1 = det H1, . . . , Δn = det Hn. We will develop a recursion formula for these determinants.
We shall expand Δ5 = det H5 by the last row.

Thus, if we define Δ0 = 1,

In the general case, expanding Δn = det Hn by the last row, we find
To find the characteristic polynomial ![]() , we only need to replace the diagonal elements hvv by hvv − λ. Then (7) yields, for
, we only need to replace the diagonal elements hvv by hvv − λ. Then (7) yields, for ![]() ,
,
where ![]() and
and ![]() . This is a formula for computing, successively,
. This is a formula for computing, successively, ![]() , . . . . If Hn is tridiagonal, (8) takes the simpler form
, . . . . If Hn is tridiagonal, (8) takes the simpler form
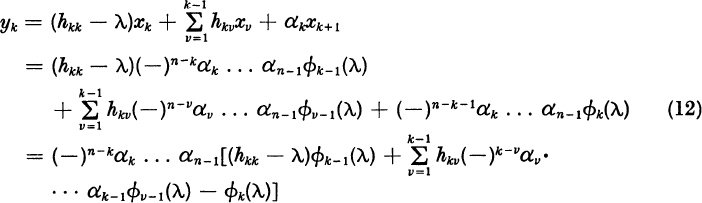
Next we shall show that, if λ is an eigenvalue of Hn, an eigenvector x = col (x1, . . . , xn) is given by
provided that at least one of these numbers xi is nonzero. Since x1 = ±α1 . . . αn−1, we have at least x1 ≠ 0 if all αv ≠ 0.
To show that (10) provides an eigenvector, we must show that, if ![]() , then
, then
If y = (Hn − λI)x, then

which equals ![]() , by (8). For k < n we have
, by (8). For k < n we have
But this expression equals 0, as we see by replacing n by k in the recursion formula (8).
If H is Hermitian, with all αj ≠ 0, we will show how the eigenvalues can be located in intervals. Since ![]() , the polynomials
, the polynomials ![]() , . . . ,
, . . . , ![]() defined by (9) satisfy
defined by (9) satisfy
Let a < λ < b be a given interval. We suppose that neither a nor b is a zero of any of the polynomials ![]() . We will count the number of zeros of
. We will count the number of zeros of ![]() in the interval (a, b). Note the following properties:
in the interval (a, b). Note the following properties:
(i) ![]() in (a, b). [In fact,
in (a, b). [In fact, ![]() .]
.]
(ii) If ![]() , then
, then ![]() and
and ![]() are nonzero and of opposite signs.
are nonzero and of opposite signs.
Proof. By (13), if either adjacent polynomial, ![]() or
or ![]() , is zero, the other one must also be zero. But then
, is zero, the other one must also be zero. But then ![]() and
and ![]() have a common zero, and the recursion formula shows that
have a common zero, and the recursion formula shows that ![]() , etc. Finally, we could conclude
, etc. Finally, we could conclude ![]() , which is impossible. Therefore,
, which is impossible. Therefore, ![]() implies both
implies both ![]() and
and ![]() . By (13),
. By (13),
![]()
Therefore, ![]() and
and ![]() have opposite signs.
have opposite signs.
(iii) As λ passes through a zero of ![]() , the quotient
, the quotient ![]() changes from positive to negative.
changes from positive to negative.
Proof: By (ii), the adjacent polynomials ![]() and
and ![]() cannot have a common zero. By the inclusion principle (Section 6.4), the zeros μj of
cannot have a common zero. By the inclusion principle (Section 6.4), the zeros μj of ![]() separate the zeros λj of
separate the zeros λj of ![]() :
:
![]()
Furthermore,
![]()
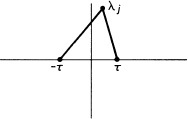
Therefore, ![]() changes sign exactly once, at the pole λ = μj, between consecutive zeros λj+1, λj; and we have Fig. 7.6 as a picture of the algebraic signs of
changes sign exactly once, at the pole λ = μj, between consecutive zeros λj+1, λj; and we have Fig. 7.6 as a picture of the algebraic signs of ![]() . We see that the sign changes from + to − as λ crosses each λj.
. We see that the sign changes from + to − as λ crosses each λj.
Figure 7.6
Sequences of polynomials ![]() with properties (i), (ii), (iii) are called Sturm sequences. They have this remarkable property:
with properties (i), (ii), (iii) are called Sturm sequences. They have this remarkable property:
Theorem 1. Let ![]() be Sturm sequence on the interval (a, b). Let σ(λ) be the number of sign changes in the ordered array of numbers
be Sturm sequence on the interval (a, b). Let σ(λ) be the number of sign changes in the ordered array of numbers ![]() . Then the number of zeros of the function
. Then the number of zeros of the function ![]() in the interval (a, b) equals σ(b) − σ(a).
in the interval (a, b) equals σ(b) − σ(a).
EXAMPLE. Let


For λ = 0 we have the signs
![]()
Hence, σ(0) = 1. For λ = 10 we have the signs
![]()
Hence, σ(10) = 3. The number of zeros of ![]() in the interval (0, 10) is, therefore, σ(10) − σ(0) = 3 − 1 = 2.
in the interval (0, 10) is, therefore, σ(10) − σ(0) = 3 − 1 = 2.
Proof of Sturm’s Theorem. The function σ(λ) can change only when λ passes through a zero of one of the functions ![]() . By property (i),
. By property (i), ![]() never changes sign in (a, b). If
never changes sign in (a, b). If ![]() , consider the triple
, consider the triple
If ![]() , property (ii) states that
, property (ii) states that ![]() and
and ![]() have opposite signs. Therefore, the triple (14) yields exactly one sign change for all λ in the neighborhood of λ0. Assume
have opposite signs. Therefore, the triple (14) yields exactly one sign change for all λ in the neighborhood of λ0. Assume ![]() . Then σ(λ) cannot change as λ crosses λ0.
. Then σ(λ) cannot change as λ crosses λ0.
If λ crosses a zero λv of ![]() , property (iii) states that the signs of
, property (iii) states that the signs of
![]()
change from + + to + −, or − − to + +. Therefore, exactly one sign change is added in the sequence of ordered values ![]() . In other words, σ(λ) increases by 1. In summary, σ(λ) increases by 1 each time λ crosses a zero of
. In other words, σ(λ) increases by 1. In summary, σ(λ) increases by 1 each time λ crosses a zero of ![]() ; otherwise, σ(λ) remains constant. Therefore, σ(b) − σ(a) is the total number of zeros of
; otherwise, σ(λ) remains constant. Therefore, σ(b) − σ(a) is the total number of zeros of ![]() in the interval (a, b).
in the interval (a, b).
In practice, Sturm’s theorem can be used with Gershgorin’s theorem (Section 6.8). For tridiagonal H = H*, we know from Gershgorin’s theorem that every eigenvalue of H satisfies one of the inequalities
where h01 = hn, n+1 = 0. The union of the possibly-overlapping intervals (15) is a set of disjoint intervals
These intervals can be subdivided, and Sturm’s theorem can be applied quickly to each of the resulting subintervals (aiα, biα).
When Sturm’s theorem is used numerically to locate the eigenvalues of tridiagonal H = H*, the coefficients of the characteristic polynomials ![]() should not be computed. Instead, the recursion formula (13) should be used directly to evaluate successively the numbers
should not be computed. Instead, the recursion formula (13) should be used directly to evaluate successively the numbers ![]() and hence the integer σ(λ).
and hence the integer σ(λ).
In the proof of Sturm’s theorem, we assumed that
We can show that it was only necessary to assume
If (18) is true but (17) is false, then for all sufficiently small ![]() > 0 we have
> 0 we have
By what we have already proved, the number of zeros of ![]() in (a +
in (a + ![]() , b −
, b − ![]() ) is σ(b −
) is σ(b − ![]() ) − σ(a +
) − σ(a + ![]() ). But
). But
because ![]() has no zeros for
has no zeros for ![]() . Thus, the number of zeros of
. Thus, the number of zeros of ![]() in (a, b) equals the number of zeros of
in (a, b) equals the number of zeros of ![]() in (a +
in (a + ![]() , b −
, b − ![]() ), which equals σ(b) − σ(a).
), which equals σ(b) − σ(a).
For a precise computation of the eigenvalues, Newton’s method should be used after the eigenvalues have been separated and approximated by the theorems of Gershgorin and Sturm. Newton’s method for computing the real roots of an equation ![]() is discussed in texts on numerical analysis. This method converges extremely rapidly if the first approximation is fairly accurate.
is discussed in texts on numerical analysis. This method converges extremely rapidly if the first approximation is fairly accurate.
1. Using the recurrence formula (8), evaluate det (H − λI) for the n × n Hessenberg matrix

3.* Let
![]()
Define Δ0 = 1, Δ1 = c1,
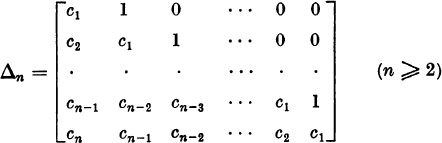
Prove that
![]()
[Show that (7) implies ![]() as in Problem 2, evaluate Δn for all n.
as in Problem 2, evaluate Δn for all n.
4. Using formula (10), calculate an eigenvector for the matrix

belonging to the eigenvalue λ = 0.
5. Let H be a Hessenberg matrix, as in formula (2). Show that H is similar to a Hessenberg matrix H′ with ![]() if
if ![]() if αj = 0. (Form
if αj = 0. (Form ![]() , where A is a suitable diagonal matrix.)
, where A is a suitable diagonal matrix.)
6. Let
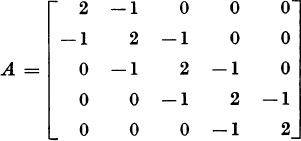
Let ![]() . Using the recursion formula (13), calculate numerical values for the
. Using the recursion formula (13), calculate numerical values for the ![]() for λ = 0 and for λ = 4. How many eigenvalues of A lie between 0 and 4?
for λ = 0 and for λ = 4. How many eigenvalues of A lie between 0 and 4?
7.* Let Hn be the n × n matrix
(The matrix A in the last problem is H5). Let ![]() and, for
and, for ![]() , let
, let ![]() . I Making the change of variable λ = 2 − 2 cos θ, prove that
. I Making the change of variable λ = 2 − 2 cos θ, prove that
![]()
Hence find all the eigenvalues of Hn. [Use the recursion formula (13).]
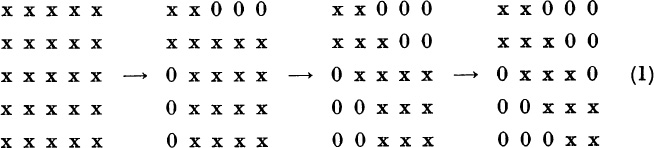
Let A be a real, symmetric n × n matrix. We will show how A can be reduced to tridiagonal form by n − 2 real, unitary similarity-transformations. For n = 5 the process is illustrated as follows:
From the tridiagonal form, the characteristic polynomial can be found by the recursion formula (9) of the preceding section, or the eigenvalues can be located in intervals by Sturm’s theorem (Theorem 1, Section 7.11).
If A is real but not symmetric, the method will produce zeros in the upper right corner but not in the lower left corner. For n = 5, the process would appear as follows:
The final matrix is in the Hessenberg form, and the characteristic polynomial can be found by the recursion formula (8) of the last section. If A is complex, the method is modified in the obvious way, by replacing transposes xT by their complex conjugates x*.
In the real, symmetric case, the first transformation A → B = UTA U is required to produce a matrix of the form
If all a1k already ![]() , we set B = A. Otherwise, we will use a matrix of the form
, we set B = A. Otherwise, we will use a matrix of the form
Explicitly, if the real column-vector u has components ui, then U = (δij − 2uiuj). Since we require u to have unit length, U is unitary.
U is also real and symmetric: UT = U. The requirements
place n − 1 constraints on the n-component vector u. Since there is one degree of freedom, we set u1 = 0. Note that blk = 0 implies bkl = 0, since B is symmetric.
The first row of B = UAU is the first row of UA times U. Since u1 = 0, the first row of U = I − 2uuT is just (1,0, . . ., 0). Therefore, the first row of UA is just the first row of A. Hence, the first row of B is
Since U = I − 2uuT, we have aTU = aT − 2(aTu)uT, or
The unknowns u2, . . . , un must solve the n − 1 equations
To solve these equations, we observe that the rows aT and bT = aTU must have equal lengths: bTb = aTUUTa = aTa. Thus, we require
By (8), b11 = a11. Then (11) takes the form
If ![]() , equations (8) and (12) yield
, equations (8) and (12) yield
We now multiply (13) by u2, (9) by uj (j = 3, . . . , n), and add to obtain
![]()
or
![]()
or, since we require uTu = 1,
This is a relationship between the unknown inner product aTu and the unknown component u2. Using (14) in the identity (13) for bl2, we find
We have α > 0 because at least one ![]() . Therefore, (15) has the positive solution
. Therefore, (15) has the positive solution
We choose the sign ± so that ![]() . Since α > | a12 |, we have
. Since α > | a12 |, we have ![]()
![]() . Having computed u2, we compute u3. . . , un from (9) and (14).
. Having computed u2, we compute u3. . . , un from (9) and (14).
Exercise If ± is chosen so that ![]() , and if we define
, and if we define
verify directly that the numbers u2, . . . , un defined by (16) and (17), solve the required equations (9) and (10).
We now transform A into B = UAU, with blk = bkl = 0 for ![]() . If n > 3, we wish next to transform B into a matrix C = VBV with
. If n > 3, we wish next to transform B into a matrix C = VBV with
We shall require VTV = I and V = VT.
Observe the matrix B in (3). We can partition B as follows:
where A′ is the (n − 1) × (n − 1) matrix ![]() . By analogy to (16) and (17), we can reduce A′ to the form
. By analogy to (16) and (17), we can reduce A′ to the form
by a transformation B′ = U′A′U′, where
If A′ has not already the form (21), we simply define
![]()
and define, in analogy to (16) and (17),
The sign ± is chosen to make ![]() .
.
We now assert that the required matrix V has the form
Proof: Since ![]() , the matrix V has the form
, the matrix V has the form
The first row of VBV is the first row of V times BV. Since the first row of V is (1, 0, . . . , 0), the first row of VBV is just the first row of B times V, or
Here we have used the form (25) for V. Thus, the first row and, by symmetry, the first column are unaffected. The partitoned form (24) now shows that
But U′A′U′ = B′ of the form (21). Therefore, VBV = C of the required form
where A″ is an (n − 2) × (n − 2) symmetric matrix.
We note parenthetically that V in (24) has the form
where υ is the unit vector col ![]() .
.
The process now continues. Let U″ be the (n − 2) × (n − 2) matrix of the form I″ − 2u″(u″)T which reduces A″ to the form
We then define
Since ![]() , this matrix has the form
, this matrix has the form
Therefore, as (28) shows, the first two rows and the first two columns are unaffected by the transformation C → WCW. Therefore,
After k reductions we obtain a symmetric n × n matrix, say Z = (zij), with
We call A(k) the lower-right part.
If k < n − 2, we will reduce Z further. If at least one of the numbers ![]() is nonzero, we form
is nonzero, we form ![]() from (16) and (17), replacing A by A(k), and n by n − k. Setting
from (16) and (17), replacing A by A(k), and n by n − k. Setting ![]() we have the form
we have the form
where
If we define the n × n matrix
we must show that the first k rows and the first k columns of Z are unaffected by the transformation Z → MZM = Z′. Now
![]()
Let ![]() Then by (38),
Then by (38), ![]() and
and
By (34), ![]() . Therefore, (39) yields
. Therefore, (39) yields
But (38) shows that
Then (40) implies ![]() if
if ![]() . By symmetry, we also have
. By symmetry, we also have ![]() if
if ![]() .
.
Finally, we must show that Z′ = MZM implies
Now the form (38) shows that
Therefore,
But (44) is equivalent to (42), since
COMPUTING ALGORITHM
The preceding three paragraphs give a rigorous justification of the method. In practice, the matrix M in (38) is not formed explicitly, nor is the matrix U(k)
At each stage k = 0, 1, . . . , n − 3 our task is to replace the (n − k) × (n − k) matrix A(k) by the matrix
The number θ is unchanged = ![]() . If, by chance,
. If, by chance,
then no computation is performed at stage k, since A(k) already has the form of the right-hand side of (46). Otherwise, we do compute the numbers ![]() by (16) and (17), replacing A by A(k), and n by n − k. Dropping the superscript k, we observe that
by (16) and (17), replacing A by A(k), and n by n − k. Dropping the superscript k, we observe that
Define the quadratic form
Compute Au = b, i.e., compute
By (48), the i, j-component of U(k) A(k) U(k) is
Replace ![]() by
by
Replace ![]() by 0, . . . , 0. For
by 0, . . . , 0. For ![]() replace
replace ![]() by the following equivalent of (51):
by the following equivalent of (51):
where
![]()
The components with i > j are now formed by symmetry,
COUNT OF OPERATIONS
We will count the number of multiplications and the number of square roots. At stage k = 0,1, . . . , n − 3, the calculations
require 2 square roots and approximately 2(n − k) multiplications. To form b in (50) requires (n − k)(n − k − 1) multiplications. The calculation of c requires n − k − 1 multiplications. The calculations (53) require
![]()
which is equal to (n − k) (n − k − 1) multiplications. In summary, at stage k there are
Summing for k = 0, . . . , n − 3, we find a total of
Thus, there are very few multiplications. After all, just to square an n × n matrix requires n3 multiplications. Since the number of multiplications is small, it will usually be economically feasible to use double precision.
1. Reduce the matrix

to tridiagonal form by the method of Householder and Bauer.
2. Reduce the matrix

to Hessenberg form by the method of Householder and Bauer.
3.* Reduce the matrix

to tridiagonal form by the method of Householder and Bauer.
4.* According to formula (55), the H-B reduction of an n × n symmetric matrix requires “about” 2n3/3 multiplications. What is the exact number of multiplications?
5. If A is real but not symmetric, and if A is to be reduced to Hessenberg form by the H-B method, how should formulas (50)–(53) be modified?
6. If a real matrix A is reduced to a tridiagonal or Hessenberg matrix X by the H-B method, show that ![]() . (This identity can be used as a check of rounding error.)
. (This identity can be used as a check of rounding error.)
In the theory of automatic control, in circuit theory, and in many other contexts the following problem arises: Given an n × n matrix A, determine whether all of its eigenvalues lie in the left half-plane Re λ < 0. The matrix A is called stable if all of its eigenvalues lie in the left half-plane. The importance of this concept is shown by the following theorem:
Theorem 1. An n × n matrix A is stable if and only if all solutions x(t) of the differential equation
tend to zero as t → ∞.
Proof. Suppose that A has an eigenvalue λ with Re ![]() . If c is an associated eigenvector, then the solution
. If c is an associated eigenvector, then the solution
![]()
does not tend to zero as t → ∞ because ![]() .
.
Suppose, instead, that A is stable. Let λ1 . . . , λs be the different eigenvalues of A, with multiplicities m1 . . . , ms. In formula (17) of Section 5.1, we showed that every component xv(t) of every solution x(t) of the differential equation dx/dt = Ax is a linear combination of polynomials in t times exponential functions exp, λit. Since all λi have negative real parts, every such expression tends to zero as t → ∞. This completes the proof.
One way to show that a matrix is stable is to compute all its eigenvalues and to observe that they have negative real parts. But the actual computation of the eigenvalues is not necessary. By results of Routh and Hurwitz, it is only necessary to compute the coefficients ci of the characteristic polynomial
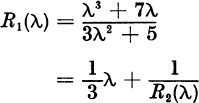
Assume that A is real, andhence that the ci are real. Form the fraction
If c1 ≠ 0, this fraction can be rewritten in the form
where α1 = 1/c1 and
with
Similarly, we write
![]()
and so on until we obtain the full continued fraction
Theorem 2. The zeros of the polynomial λn + c1λn−1 + ... + c0 all lie in the left half-plane if and only if the coefficients α1 in the continued fraction (7) are all positive.
EXAMPLE 1. Consider the polynomial
We have
with
The full continued fraction is
![]()
Here
![]()
Since all αi are positive, Routh’s theorem states that the zeros λv of the polynomial (8) are in the left half-plane. In fact, the zeros are
![]()
We will not prove Routh’s theorem, which is not a theorem about matrices, but a theorem about polynomials. A proof and a thorough discussion appear in E. A. Guillemin’s book, The Mathematics of Circuit Analysis (John Wiley and Sons, Inc., 1949) pp. 395–407. If the n × n matrix A is real, and if n is small, Routh’s theorem provides a practical criterion for the stability of the matrix A. But if n is large, Routh’s theorem is less useful because it is hard to compute accurately the coefficients of the characteristic polynomial. If the coefficients ci are very inaccurate, there is no use in applying Routh’s theorem to the wrong polynomial.
A second criterion, which applies directly to the matrix A, and which does not require that A be real, is due to Lyapunov.
Theorem 3. The n × n matrix A is stable if and only if there is a positive definite Hermitian matrix P solving the equation
If n is large, this theorem is hard to use numerically. The system (9) presents a large number, n(n+ l)/2, of linear equations for the unknown components ![]() . One must then verify that P is positive definite by the determinant criterion (see Section 6.5)
. One must then verify that P is positive definite by the determinant criterion (see Section 6.5)
Because Lyapunov’s theorem has great theoretical interest, we shall give the proof.
Proof. First assuming PA + A*P = –I, we shall prove that A is stable. By Theorem 1, it will be sufficient to show that every solution of the differential equation dx/dt = Ax tends to zero as t → ∞. We have, for the solution x (t),
Since P is positive definite, there is a number ρ > 0 for which
Then (11) yields
Therefore,
If x(0) = b, we conclude that ![]() , and hence
, and hence
But ![]() for some σ >0. Therefore,
for some σ >0. Therefore,
which shows that x → 0 as t → ∞.
Conversely, supposing that A is stable, we shall construct the positive-definite matrix P solving PA + A*P = –I. Let the n × n matrix X (t) solve
As in the proof of Theorem 1, we know that every component of the matrix X (t) is a linear combination of polynomials in t (possibly constants) times exponential functions exp ![]() where Re
where Re ![]() We bear in mind that the adjoint matrix A* has the eigenvalues
We bear in mind that the adjoint matrix A* has the eigenvalues ![]() if A has the eigenvalues λv. Taking adjoints in (17), we find
if A has the eigenvalues λv. Taking adjoints in (17), we find
Now the product X (t)X*(t) satisfies
Define the integral
This integral converges because every component of the integrand has the form
which is a linear combination of polynomials in t times decaying exponential functions. By integrating equation (19) from t = 0 to t = ∞, we find
The left-hand side, – I, appears because XX* equals I when t = 0 and equals zero when t = ∞. The matrix P is positive definite because the quadratic form belonging to a vector z ≠ 0 equals
This completes the proof.
Lyapunov’s theorem shows that, if a matrix A is stable, then there is a family of ellipsoidal surfaces (Pz, z) = const relative to which every solution of dx/dt = Ax is constantly moving inward. In fact, (11) shows that
A PRACTICAL NUMERICAL CRITERION
Let us suppose that A is an n × n matrix, not necessarily real, with n large. We will give a criterion for the stability of A which
(a) does not require explicit computation of the eigenvalues;
(b) does not require explicit computation of the coefficients of the characteristic polynomial; and
(c) does not require the solution of systems of N linear equations with ![]()
If A has eigenvalues λ1, . . . , λn, and if τ is any positive number, the numbers
all lie in the unit circle | μ | < 1 if and only if all the numbers λj lie in the left half-plane. This is evident from Figure 7.7.
Figure 7.7
The absolute value | μj | equals the distance of λj from – τ divided by the distance of λj from τ. In the figure Re λj > 0; therefore | μj | > 1.
The numbers μj are the eigenvalues of the n × n matrix
unless τ = some λj. Proof:

Assume that τ > 0 has been chosen. The problem now is to determine whether all the eigenvalues μj of the matrix B lie inside the unit circle | μj | < 1. By Theorem 3 in Section 4.9, all | μj | < 1 if and only if
In principle, we could form the powers Bk, but we prefer not to do so because each multiplication of two n × n matrices requires n3 scalar multiplications.
We prefer to form the iterates Bkx(0) = x(k), where x(0) is some initial vector. As the vectors x(0), x(l), x(2), . . . are computed, we look at the successive lengths squared:
If these numbers appear to be tending to zero, we infer that A is stable; if these numbers appear to be tending to infinity, we infer that A is unstable; if the numbers || x(k) ||2 appear to be tending neither to 0 nor to ∞, we infer that A is stable or unstable by a very small margin. We will justify this procedure in Theorem 4.
If A is a stable normal matrix—e.g., a stable Hermitian matrix—the numbers (28) will form a monotone decreasing sequence. We see this from the expansion
![]()
of x(0) in the unit orthogonal eigenvectors uj of A. The vectors uj are also eigenvectors of B. Then

where all | μj | < 1. If A is not a normal matrix, the sequence (28) will not usually be monotone.
How large should the number τ > 0 be chosen? If τ is too small or too large, all of the eigenvalues
![]()
of B are near ±1. If any λj has Re λj > 0, we would like the modulus | μj | to be as large as possible. We assert that, if Re λ > 0, then
Proof. If λ = ρeiθ, with | θ |< π/2, we must show that
![]()
This is true if
![]()
or if
![]()
which is true, with equality only if τ = ρ. If A is given, a reasonable first guess for the modulus, ρ, of an eigenvalue is
We find this value by summing
![]()
for i = 1, . . . , n, and by falsely replacing all aij by | aij | and all xi by 1. The number τ defined by (30) is of the right general size.
Lemma. Let B be an n × n matrix. Let p be a principal vector of grade ![]() belonging to the eigenvalue μ. Then for large k we have the asymptotic forms
belonging to the eigenvalue μ. Then for large k we have the asymptotic forms
where v is an eigenvector belonging to μ and where the remainder r(k) equals 0 if g = 1 or equals
Proof. By the notation (32) we mean that, for some constant γ > 0,
![]()
If g = 1, then p is an eigenvector, p = υ, and r(k) = 0 in (31). If ![]() , we have for
, we have for ![]()
In the expansion by the binomial theorem, we have
![]()
for the principal vector p. The vector
![]()
is an eigenvector because p has grade g. Since g is fixed as k → ∞, we have
For the other terms in (33) we have ![]() in the formula
in the formula
The last three formulas yield the required asymptotic form (31).
In the following theorem, we shall use the phrase “with probability one,” and we wish now to define the sense in which this phrase will be used. Consider an arbitrary nonzero n-component vector x. Let B be an n × n matrix with the different eigenvalues μ1 . . . , μs with multiplicities m1 . . . , ms, where Σ mi = n. As we showed in Section 5.2, the vector x has a unique expansion
in principal vectors p(j) belonging to the eigenvalues μj. In the last paragraph of Section 5.3 we concluded that the space of principal vectors p(j) has dimension mj. Let Zj be the linear space of vectors x for which p(j) = 0 in the representation (36). Then the dimension of Zj is n − mj < n. Thus, Zj has n-dimensional measure zero. The set Z of vectors x for which at least one p(j) = 0 in the expansion (36), is the union
![]()
of the sets Zj, all of which have measure zero. Therefore, Z has measure zero. In this sense we say that, with probability one, all of the principal vectors p(j) are nonzero in the expansion (36) of a random vector x.
Theorem 4. Let B be an n × n matrix. Let x = x(0) be a random vector.
Let
x(1) = Bx(0), x(2) = Bx(1), x(3) = Bx(2), . . .
Let μ1, μ2, . . . be the eigenvalues of B
Case 1. if all | μj | < 1, then x(k) → 0 as k → ∞.
Case 2. If all ![]() , and if at least one | μj | = 1, then with probability one the sequence x(k) does not tend to zero.
, and if at least one | μj | = 1, then with probability one the sequence x(k) does not tend to zero.
Case 3. If at least one | μj | > 1, then with probability one || x(k) || → ∞ as k → ∞.
Proof. In Case 1 we know that Bk → 0 as k → ∞, and therefore
![]()
Let μ1, . . . , μs be the different eigenvalues of B, with multiplicities m1 . . . , ms. Let
where Σ mi = n and ![]() . Form the expansion (36) of x as a sum Σ p(j) of principal vectors of B. With probability one all p(j) ≠ 0. In other words, with probability one every p(j) in the expansion x = Σ p(j) has grade
. Form the expansion (36) of x as a sum Σ p(j) of principal vectors of B. With probability one all p(j) ≠ 0. In other words, with probability one every p(j) in the expansion x = Σ p(j) has grade ![]() . Then, by the preceding lemma,
. Then, by the preceding lemma,
where υ(1), . . . , υ(s) are eigenvectors corresponding to μ1 . . . , μs. Let
Let J be the set of integers j such that ![]() and such that gj = g. Then (38) yields
and such that gj = g. Then (38) yields
where ρ = | μl | = . . . = | μr |. By the notation o(Kg−1 ρk) we mean any function of k such that
For all j ∈ J we have | μj | = ρ. Let
where the angles θj are distinct numbers in the interval ![]() . In Cases 2 and 3 we assume
. In Cases 2 and 3 we assume ![]() . From (40) we have
. From (40) we have
Eigenvectors υ(j) belonging to different eigenvalues μj are linearly independent. Therefore, the minimum length
is a positive number δ > 0. Letting αj = exp (ikθj) in (43), we find
In Case 2 we have ρ = 1, and || x(k) || → ∞ if g > 1. If g = 1 and ρ = 1, then (43) shows that x(k) remains bounded but (45) shows that x(k) does not tend to zero. In Case 3 we have ρ > 1, and (45) shows that || x(k) || → ∞.
1. Let A be an n × n matrix. Let ![]() and ψ(λ) be polynomials with real or complex coefficients. Suppose that ψ(λj) ≠ 0 for all eigenvalues λj of A. Prove that the n × n matrix ψ(A) has an inverse. Then prove that the eigenvalues of the matrix
and ψ(λ) be polynomials with real or complex coefficients. Suppose that ψ(λj) ≠ 0 for all eigenvalues λj of A. Prove that the n × n matrix ψ(A) has an inverse. Then prove that the eigenvalues of the matrix ![]() are
are ![]()
![]() . (First prove the result for triangular matrices T. Then use the canonical triangularization A = UTU*.)
. (First prove the result for triangular matrices T. Then use the canonical triangularization A = UTU*.)
2. Find the Lyapunov ellipses (Px, x) = const for the stable matrix
![]()
3. Let A be any stable n × n matrix and let Q be any n × n positive-definite Hermitian matrix. Show that there is a positive-definite matrix P solving the equation − Q = A*P + PA.
4. Let A be any stable n × n matrix. Let C be an arbitrary n × n matrix. Show that the equation −C = A*M + MA has a solution M. Since every equation −C = A*M + MA has a solution, M, deduce that the particular equation −I = A*P + PA has a unique solution, P.
5. Let λ3 + c1λ2 + c2λ + c3 have real coefficients. According to the Routh-Hurwitz criterion, what inequalities are necessary and sufficient for the zeros of the polynomial to have negative real parts?
6. For the stable matrix A in Problem 2, compute the number T in formula (30). Compute the matrix B in formula (26). What are the eigenvalues of B?
7. Let
![]()
Compute the number τ and the matrix B. For which vectors x do the iterates Bkx tend, in length, to infinity as k → ∞? What is the probability, for a random vector x, that || Bkx || → ∞ as k → ∞?
In the QR method of computing eigenvalues, we shall need an accurate way of reducing an n × n matrix A to a right-triangular matrix R by transformation
Here we assume that A, U, and R are real or complex matrices, with
In principle, we could perform this transformation by the Gram-Schmidt process described in Section 4.5. If the columns a1, . . . , an of A were independent, we could form unit vectors υ1, . . ., υn such that ak would be a linear combination of υ1, . . . , υk.
In other words.
or
A = VR
Then we could take U = V* in (1). Unfortunately, the Gram-Schmidt process has been found to be highly inaccurate in digital computation. This inaccuracy is demonstrated in J. H. Wilkinson’s book.2
In this section, we shall show how to perform the reduction UA = R by a sequence of reflections
where each Uj has the form I − 2ww*, or where Uj = I. Here w is a unit vector depending on j. The matrices Uj are both unitary and Hermitian:
The matrix Uj will produce zeros below the diagonal in column j; and Uj will not disturb the zeros which shall already have been produced in columns 1, . . . , j – 1. Thus, if n = 4,

Let A1 = A, and for j > 1 let
Aj = Uj − 1. . . U1A
Assume that Aj has zeros below the diagonal in columns 1, . . . , j − 1. Let the j th column of Ak have the form
Let
If β = 0, then Aj already has zeros below the diagonal in column j, and we set Uj = I.
If β > 0, we look for Uj in the form
We shall have
For this vector to have zeros in components j + 1, . . . , n, we must have wj+1, . . . , wn proportional to cj+1, . . . , cn, since 2(w*c) is simply a scalar.
Thus, we look for w in the form
Then
![]()
and UjC will have zeros in components j + 1, . . . , n if
For w to be a unit vector, we must have
Elimination of | λ |2 from (11) and (12) gives
If cj = | cj | exp (iγj), we will look for μ in the form μ = | μ | exp (iγj). Then (13) becomes
![]()
which has the positive solution
![]()
Then
Now (11) yields
![]()
Then Uj = I – 2ww*.
We must show, finally, that multiplication by Uj does not disturb the zeros below the diagonal in columns 1, . . . , j − 1. If z is any of the first j − 1 columns of Aj, then zj = zj+l = . . . = zn = 0. Therefore,

Now (15) shows that the first j − 1 columns of Aj are not changed in the multiplication UjAj.
We also observe that, since 2ww* has zeros in rows 1, . . . , j − 1, the first j − 1 rows of Aj are, likewise, not changed in the multiplication UjAj.
To perform the multiplication UjAj, we do not first form the matrix Uj. If x is the kth column of ![]() , then the kth column of the product UjAj is
, then the kth column of the product UjAj is
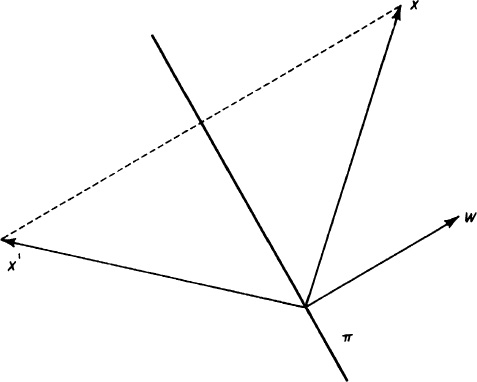
In real Euclidian space, the matrix I − 2ww* represents the easily-visualized geometric transformation in Figure 7.8. Through the origin there is a plane, π, to which w is a unit normal. The vector (w*x)w is the projection of x in the direction of w. If we subtract twice this projection from x, we obtain the vector
Figure 7.8
![]()
which is the reflection of x through the plane π.
1. Let α, β, γ, δ be real. Let
![]()
Reduce A to right-triangular form by a transformation (I − 2ww*)A = R.
2. Using the method described in this section, reduce the matrix
to right-triangular form.
In this section we will present an introduction to the method of Francis and Kublanovskaya, known as the QR method. We wish to compute the eigenvalues of an n × n real or complex matrix A. By the method of the preceding section, we factor A in the form
where Q1 Q1* = I and where R1 is right-triangular. Setting A = Al, we now form
We now factor A2 in the form A2 = Q2 R2, and we form A3 = R2 Q2. In general,
Under certain conditions on A, as s → ∞ the matrix As becomes a right-triangular matrix with the eigenvalues of A on the diagonal. We will prove this convergence in the simplest case; we shall assume that A has eigenvalues with distinct moduli:
This proof and more general proofs have been given by Wilkinson.3
First, we discuss the transition from As to As+l. By the method of the preceding section, we can find unitary, Hermitian matrices U1, . . ., Un − 1, depending on s, such that
Thus, As = Qs Rs, where Qs = U1 . . . Un − 1. Then
The matrix Qs is never computed explicitly, nor are the matrices Uj. We know that each Uj has the form
as in formula (15) of the preceding section. We do compute the scalars and vectors ζj and q(j), and by means of them we compute successively
![]()
Then we compute successively
Every product X(I – ζqq*) occurring in (8) is computed as X – ζyq*, where y = Xq.
We shall now study the uniqueness and the continuity of QR factorizations.
Lemma 1. Let Abe a nonsingular matrix with two QR factorizations
where the Q’s are unitary and the R’s are right-triangular. Then there is a diagonal matrix of the form
such that
Proof. First suppose that Q = R, where
Then I = Q*Q = R*R. The first row of R*R is
r11(r11,r12, . . . , r1n)
Therefore,
Since r12 = 0, the second row of R*R is
![]()
Therefore,
![]()
Continuing in this way, we verify that rij = δij(i, j = 1, . . . , n). Therefore, Q = R = I.
If A = Q1 R1 = Q2 R2, where A is nonsingular, then R1−1 exists and
If the diagonal elements of the right-triangular matrix R2 R1−1 have arguments θl, . . . , θn, and if E is defined by (10), then the matrices
![]()
satisfy the conditions (12), and Q = R. Therefore, Q = R = I, and the identities Q2 = Q1E*, R2 = ER1 follow.
Lemma 2. Let Ak → I as k → ∞. Let Ak = QkRk, where Qk is unitary, and where Rk is right-triangular with positive-diagonal elements. Then Qk → I and Rk → I as k → ∞.
Proof. We have
![]()
Let rij(k) be the i, j component of Rk. The first row of ![]() is
is
![]()
Hence,
The second row of ![]() is
is
![]()
Using the first result (15), we conclude that
Continuing by successive rows in this way, we conclude that Rk → I as k → ∞. The explicit form of the inverse ![]() . (cofactor matrix)T now shows that
. (cofactor matrix)T now shows that ![]() , and hence also
, and hence also ![]() as k → ∞.
as k → ∞.
Lemma 3. If Q1, Q2, . . . are unitary, and if R1, R2, . . . are right-triangular, and if
then, for s = 2, 3, . . . ,
and
Proof. The identities (17) imply that
![]()
Therefore, if (18) is true for any s, we have
![]()
Since (18) is true for s = 1, it is true for all s.
Formula (19) also follows by induction from (17), since
![]()
Theorem 1. Let A1 be an n × n matrix with eigenvalues λj such that |λ 1| > |λ 2| > · · · > |λ n| > 0. Let A1 have a canonical diagonalization
where D = diag (λ1, . . . , λn). Assume that all of the n principal minors of the matrix Y = X−1 are nonsingular:
Let matrices A2, A3, . . . be formed by the QR method (17). Then there is a sequence of diagonal matrices E1, E2, . . . of the form (10) such that
where the matrix Rx is right-triangular.
In this sense, As tends to a right-triangular matrix with the eigenvalues of A, in order, appearing on the main diagonal.
Proof. As we proved in Section 7.3, the condition (21) is necessary and sufficient for the matrix Y = X−1 to have a decomposition Y = LY RY, where LY is left-triangular, where RY is right-triangular, and where LY has 1’s on the main diagonal. Then
![]()
But
since the elements above the diagonal are zero, while the elements on the diagonal are 1’s, and the elements below the diagonal satisfy
Let X have the factorization X = Qx Rx where Qx is unitary and Rx is right-triangular. Then
![]()
Since Js → I as s → ∞, Js has a QR factorization
where ![]() is unitary and
is unitary and ![]() is right-triangular; that follows from Lemma 2. Then
is right-triangular; that follows from Lemma 2. Then ![]() has the QR decomposition
has the QR decomposition
But Lemma 3 gives the QR decomposition
![]()
Now Lemma 1 states that there is a matrix Es of the form (10) such that
Now the identity (19) for As yields

But
![]()
Therefore,
![]()
and
This is the justification of the QR method in the simplest case. It is possible to remove the restriction that X−1 have nonsingular principal minors. It is even possible to remove the restriction that the eigenvalues of A have distinct moduli. If the moduli are not distinct, the matrices As tend to block-right-triangular matrices, where each m × m block centered on the diagonal is an m × m matrix whose m eigenvalues are eigenvalues of equal moduli belonging to A. The theory underlying this method is surprisingly difficult.
The idea for the QR method came, no doubt, from an older method due to Rutishauser:
where L1, L2, . . . are left-triangular and R1, R2, . . . are right-triangular.
In the following problems, assume that all matrices L are left-triangular matrices with 1’s on the main diagonal, and that all matrices R are right-triangular matrices.
1. If A = L1R1 = L2R2, and if A is nonsingular, prove that L1 = L2 and R1 = R2.
2. If Ak = LkRk → I as k → ∞, prove that Lk → I and Rk → I.
3. If A1 is a nonsingular matrix, and if
![]()
prove that
![]()
4.* Let A1 satisfy the conditions of Theorem 1. Assume that matrices A2, A3, . . . can be formed as in the last problem. Show that, as s → ∞, As tends to a right-triangular matrix whose diagonal elements are the eigenvalues A1.
2 J. H. Wilkinson, Rounding Errors in Algebraic Processes. Englewood Cliffs, N.J.: Prentice-Hall, Inc., 1963, pp. 86–91.
3 J. H. Wilkinson, “Convergence of the LR, QR, and related algorithms,” The Computer Journal, vol. 8 (1965), 77–84.