The method just described for finding edges was further refined by J. Canny in 1986 into what is now commonly called the Canny edge detector [Canny86]. One of the differences between the Canny algorithm and the simpler, Laplace-based algorithm from the previous section is that, in the Canny algorithm, the first derivatives are computed in x and y and then combined into four directional derivatives. The points where these directional derivatives are local maxima are then candidates for assembling into edges.
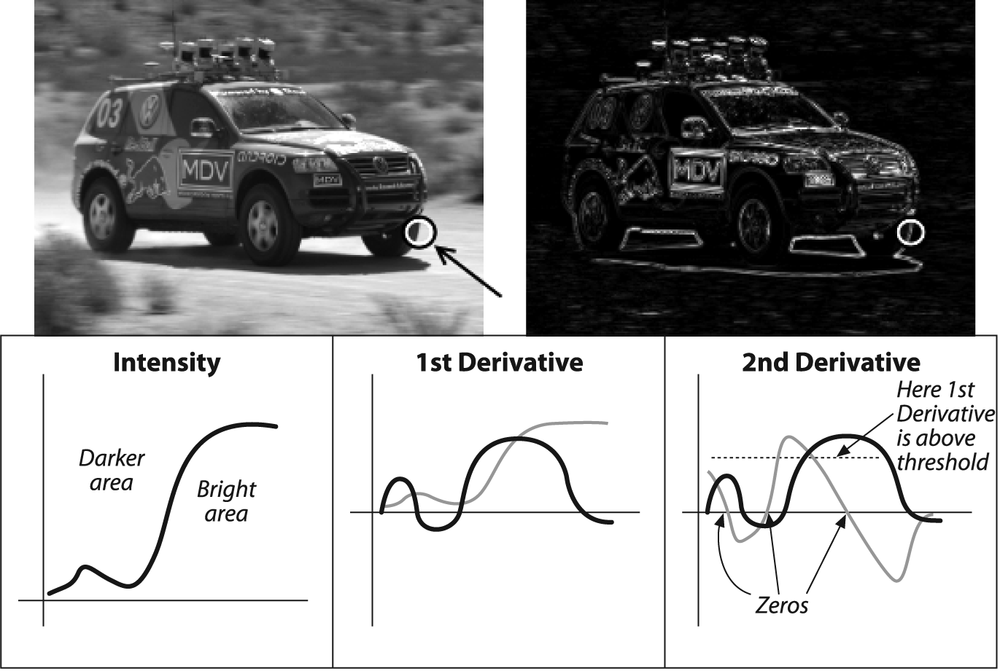
Figure 6-6. Laplace transform (upper right) of the racecar image: zooming in on the tire (circled in white) and considering only the x-dimension, we show a (qualitative) representation of the brightness as well as the first and second derivative (lower three cells); the 0s in the second derivative correspond to edges, and the 0 corresponding to a large first derivative is a strong edge
However, the most significant new dimension to the Canny algorithm is that it tries to assemble the individual edge candidate
pixels into contours. [67] These contours are formed by applying an hysteresis
threshold to the pixels. This means that there are two thresholds, an upper and
a lower. If a pixel has a gradient larger than the upper threshold, then it is accepted as
an edge pixel; if a pixel is below the lower threshold, it is rejected. If the pixel's
gradient is between the thresholds, then it will be accepted only if it is connected to a
pixel that is above the high threshold. Canny recommended a ratio of high:low threshold
between 2:1 and 3:1. Figures Figure 6-7 and
Figure 6-8 show the results of applying
cvCanny() to a test pattern and a photograph using
high:low hysteresis threshold ratios of 5:1 and 3:2, respectively.
void cvCanny( const CvArr*img, CvArr*edges, doublelowThresh, doublehighThresh, intapertureSize = 3);
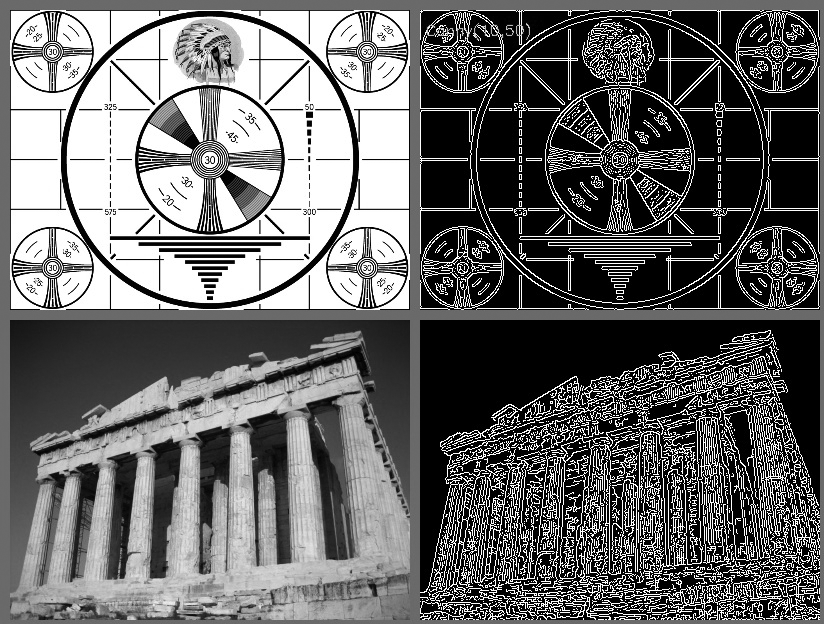
Figure 6-7. Results of Canny edge detection for two different images when the high and low thresholds are set to 50 and 10, respectively
The cvCanny() function expects an input image, which
must be grayscale, and an output image, which must also be grayscale (but which will
actually be a Boolean image). The next two arguments are the low and high thresholds, and the
last argument is another aperture. As usual, this is the aperture used by the Sobel
derivative operators that are called inside of the implementation of cvCanny().
[67] We'll have much more to say about contours later. As you await those revelations,
though, keep in mind that the cvCanny() routine does
not actually return objects of type CvContour; we
will have to build those from the output of cvCanny()
if we want them by using cvFindContours(). Everything
you ever wanted to know about contours will be covered in Chapter 8.