Chapter 11. Final Code and Conclusion
At this point in the build, you should have at least two things: a working rover, and a directory on the Pi full of small Python scripts that do all kinds of neat things separately, but don’t work together very well. As the last part of this build, we’ll have to combine all of the scripts into one large working program that does everything we expect it to.
When setting up this program,we need to ask
ourselves a few questions. First, how many sensors are we going to be using? There are a lot of
different ones, and you have only a limited number of GPIO pins available (unless
they’re all on the I2C bus). Also, some of the sensors don’t play well
together in the same program. For instance, the SHT15 temperature sensor works
great when you test it by itself. But when you try to use another GPIO pin as an
output (such as for a motor), the sht1x library re-declares the GPIO pin
setup, which negates all the setup you do in the main script. Not to worry, of
course—we can use the getTemperature() function from the BMP180 sensor to
get the ambient temperature.
So once you’ve figured out what sensors you’re going to use, and where to place them, and how to wire them, all that remains is to write the final program. Simple, right? Actually, as I said at the beginning of the book, if you’ve been following along, most of this work is already done—all you’re doing is putting the pieces together.
I designed the program to be interactive. There’s no robotic autonomy in this
program, as such a program would probably end up being thousands of lines of
code. Rather, the program displays all pertinent sensor data (temperature,
pressure, bearing, location, etc.) and then asks for input from the user as to
what to do next. If you tell the rover to move forward, the program calls the
moveForward() function. Then the sensors are polled, the sensor data is
displayed, and the user is prompted again. The moveForward() function
continues to execute until the user stops it. This allows the rover to continue
to move until you tell it otherwise, rather than moving forward a few feet and
then stopping and waiting for further instructions.
If you choose to build on this script and pursue autonomous behavior, your best bet is probably to go through a continuous loop, polling the sensors for data one by one. You can then put interrupts related to each sensor that tell the rover what to do if any of the sensors read a particular value.
Perhaps the most obvious use of this algorithm is to make the rover follow a preprogrammed route using GPS waypoints. By calling gpsd.fix.latitude and gpsd.fix.longitude, you can determine whether the rover should move forward, turn left, or turn right. When those values match your first set of coordinates, you can execute a preplanned action and then continue. To give you an example, using the GPS sensor only:
# Destination: 36.21 degrees N, 116.53 degrees W.# When we reach that point, turn due south and# continue driving# Assume that we're approaching from the WestwhileTrue:curLat=gpsd.fix.latitudecurLon=gpsd.fix.longitude# Longitude degrees W are delineated with a# negative sign in NMEA stringsif(curLat==36.21)and(curLon==-116.53):allStop()spinLeft()time.sleep(1)allStop()takePicture()elifcurLat<36.21:# You've gone too far,# back upmoveBackward()continueelifcurLat>36.21:# You're not there yet# Keep goingmoveForward()continue
This is by no means a complete section of code, has not been tested, and barely covers any of the possible actions based on the rover’s location, but it should give you some ideas, both of what is possible with a rover and what is required to achieve it. Programming an “intelligent” rover or robot is no small task, as you need to try to plan for all possible situations and then program responses to those situations—at least until artificial intelligence makes some serious strides forward. That, in fact, is part of the fun of robotic programming: not only trying to anticipate all possible situations, but also trying to program behaviors and algorithms so that the rover can react to those situations, as well as those that you (inevitably) didn’t think of or plan for. This makes what I call a robust program; should something unexpected arise, the rover has a default behavior that it can fall back on that will always work.
In the meantime, you’ll be driving your rover with your laptop, calling
functions by pressing keys. I’ve tried to keep to the traditional gaming keymap: W to move forward, Z to move backward, A and D to move left and right, respectively, and S to stop. In addition, there are keys to raise the arm, lower the arm, and take a picture. In each case, the program asks for user input, calls the required function, waits a second, polls the sensors, clears the screen, and displays the sensor readings and the input prompt again. Before everything else starts, the program asks the user if a GPS is connected; if you don’t have one connected, the program skips the location query. This is done because if the program tries to query a nonexistent GPS module, it will break.
# This script runs the rover,# displaying readings from the sensors# every time it gets input# from the userimporttimeimportosimportRPi.GPIOasGPIOimportsubprocessfromsht1x.Sht1ximportSht1xasSHT1ximportsmbusimportmathfromgpsimport*importthreadingfromAdafruit_BMP085importBMP085GPIO.setwarnings(False)GPIO.setmode(GPIO.BOARD)GPIO.setwarnings(False)# Motor setup# 19 = IN1# 21 = ENA# 23 = IN2GPIO.setup(19,GPIO.OUT)GPIO.setup(21,GPIO.OUT)GPIO.setup(23,GPIO.OUT)# 22 = IN3# 24 = ENB# 26 = IN4GPIO.setup(22,GPIO.OUT)GPIO.setup(24,GPIO.OUT)GPIO.setup(26,GPIO.OUT)defmoveForward():# r forwardGPIO.output(21,1)GPIO.output(19,0)GPIO.output(23,1)# l forwardGPIO.output(24,1)GPIO.output(22,0)GPIO.output(26,1)defmoveBackward():# r backwardGPIO.output(21,1)GPIO.output(19,1)GPIO.output(23,0)# l backwardGPIO.output(24,1)GPIO.output(22,1)GPIO.output(26,0)defallStop():GPIO.output(21,0)GPIO.output(24,0)defspinRight():# leftforward, rightbackwardGPIO.output(24,1)GPIO.output(22,0)GPIO.output(26,1)GPIO.output(21,1)GPIO.output(19,1)GPIO.output(23,0)defspinLeft():# rightforward, leftbackwardGPIO.output(21,1)GPIO.output(19,0)GPIO.output(23,1)GPIO.output(24,1)GPIO.output(22,1)GPIO.output(26,0)# GPS setupgpsd=NoneclassGpsPoller(threading.Thread):def__init__(self):threading.Thread.__init__(self)globalgpsdgpsd=gps(mode=WATCH_ENABLE)self.current_value=Noneself.running=Truedefrun(self):globalgpsdwhilegpsp.running:gpsd.next()# Compass setupbus=smbus.SMBus(0)compAddress=0x1edefread_byte(adr):returnbus.read_byte_data(compAddress,adr)defread_word(adr):high=bus.read_byte_data(compAddress,adr)low=bus.read_byte_data(compAddress,adr+1)val=(high<<8)+lowreturnvaldefread_word_2c(adr):val=read_word(adr)ifval>=0x8000:return-((65535-val)+1)else:returnvaldefwrite_byte(adr,value):bus.write_byte_data(compAddress,adr,value)defgetBearing():write_byte(0,0b01110000)write_byte(1,0b00100000)write_byte(2,0b00000000)scale=0.92x_offset=-39y_offset=-100x_out=(read_word_2c(3)-x_offset)*scaley_out=(read_word_2c(7)-y_offset)*scalebearing=math.atan2(y_out,x_out)ifbearing<0:bearing+2*math.pireturnstr(math.degrees(bearing))# Robotic arm servo setupdefliftArm():foriinrange(50,90):subprocess.call("echo 2="+str(i)+"/dev/servoblaster",shell=True)time.sleep(0.5)deflowerArm():foriinreversed(range(50,90)):subprocess.call("echo 2="+str(i)+"/dev/servoblaster",shell=True)time.sleep(0.5)# Rangefinder setupGPIO.setup(15,GPIO.OUT)GPIO.setup(13,GPIO.IN)defgetRange():time.sleep(0.3)GPIO.output(15,1)time.sleep(0.00001)GPIO.output(15,0)whileGPIO.input(13)==0:signaloff=time.time()whileGPIO.input(13)==1:signalon=time.time()timepassed=signalon-signaloffdistance=timepassed*17000returnstr(distance)# Pressure and temperaturebmp=BMP085(0x77)defgetTemperature():returnstr(bmp.readTemperature())defgetPressure():returnstr(bmp.readPressure()/1000)if__name__=='__main__':gpsQuery=raw_input("Do you have a GPS connected? (y/n) ")ifgpsQuery=='y':gpsp=GpsPoller()try:gpsp.start()whileTrue:# Get command from useros.system("clear")"Range to target: "+getRange()"Temp: "+getTemperature()+"C""Pressure: "+getPressure()+"kPa""Location: "+str(gpsd.fix.longitude)+", "+str(gpsd.fix.latitude)"Bearing: "+getBearing()+" degrees""W = forward""Z = backward""A = left""D = right""S = stop""O = raise arm""P = lower arm""I = take picture"command=raw_input("Enter command(Q to quit): ")ifcommand=="w":moveForward()time.sleep(0.5)continueelifcommand=="z":moveBackward()time.sleep(0.5)continueelifcommand=="a":spinLeft()time.sleep(0.5)continueelifcommand=="d":spinRight()time.sleep(0.5)continueelifcommand=="s":allStop()time.sleep(0.5)continueelifcommand=="o":liftArm()time.sleep(0.5)continueelifcommand=="p":lowerArm()time.sleep(0.5)continueelifcommand=="i":subprocess.call("raspistill -o image.jpg",shell=True)time.sleep(0.5)continueelifcommand=="q":gpsp.running=Falsegpsp.join()GPIO.cleanup()breakelse:"Command not recognized. Try again."time.sleep(1)continueexcept(KeyboardInterrupt,SystemExit):gpsp.running=Falsegpsp.join()GPIO.cleanup()else:try:whileTrue:# Get command from useros.system("clear")"Range to target: "+getRange()"Temp: "+getTemperature()+"C""Pressure: "+getPressure()+"kPa""Bearing: "+getBearing()+" degrees""W = forward""Z = backward""A = left""D = right""S = stop""O = raise arm""P = lower arm""I = take picture"command=raw_input("Enter command(Qtoquit):")ifcommand=="w":moveForward()time.sleep(0.5)continueelifcommand=="z":moveBackward()time.sleep(0.5)continueelifcommand=="a":spinLeft()time.sleep(0.5)continueelifcommand=="d":spinRight()time.sleep(0.5)continueelifcommand=="s":allStop()time.sleep(0.5)continueelifcommand=="o":liftArm()time.sleep(0.5)continueelifcommand=="p":lowerArm()time.sleep(0.5)continueelifcommand=="i":subprocess.call("raspistill -oimage.jpg",shell=True)time.sleep(0.5)continueelifcommand=="q":gpsp.running=Falsegpsp.join()GPIO.cleanup()breakelse:"Command not recognized.Tryagain."time.sleep(1)continueexcept(KeyboardInterrupt,SystemExit):GPIO.cleanup()
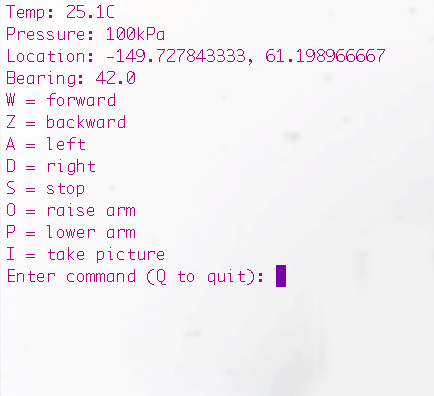
Now, keep in mind that this is only a starter script, and it doesn’t use all of the sensors we went over in Chapter 10. Because your Pi has a limited number of GPIO pins, you may have to play around with power rails on your breadboard, adding and subtracting I2C devices, and other ways of managing the sensors on your rover. When it’s running, you’ll see a command window like that in Figure 11-1.
You may even decide to design a GUI for your rover interface. If you decide to do that, I suggest researching Python’s Tkinter library. It’s functional more than fashionable, but its small learning curve makes it possible to design fully working user interfaces for your Python scripts.
Whatever you decide to do with your rover, above all have fun with it. Once you’ve solved the problems inherent in designing a rover from scratch, you can modify and tweak it to your heart’s content.
I look forward to seeing what you come up with!