
Linear Mappings
5.1 Introduction
The main subject matter of linear algebra is the study of linear mappings and their representation by means of matrices. This chapter introduces us to these linear maps and Chapter 6 shows how they can be represented by matrices. First, however, we begin with a study of mappings in general.
5.2 Mappings, Functions
Let A and B be arbitrary nonempty sets. Suppose to each element in a ∈ A there is assigned a unique element of B; called the image of a. The collection f of such assignments is called a mapping (or map) from A into B, and it is denoted by

The set A is called the domain of the mapping, and B is called the target set. We write f(a), read “f of a,” for the unique element of B that f assigns to a ∈ A.
One may also view a mapping f : A → B as a computer that, for each input value a ∈ A, produces a unique output f(a) ∈ B.
Remark: The term function is used synonymously with the word mapping, although some texts reserve the word “function” for a real-valued or complex-valued mapping.
Consider a mapping f : A → B. If A′ is any subset of A, then f(A′) denotes the set of images of elements of A′; and if B′ is any subset of B, then f−1(B′) denotes the set of elements of A; each of whose image lies in B. That is,

We call f(A′) the image of A′ and f−1(B′) the inverse image or preimage of B′. In particular, the set of all images (i.e., f(A)) is called the image or range of f.
To each mapping f : A → B there corresponds the subset of A × B given by {(a, f(a)) : a ∈ A}. We call this set the graph of f. Two mappings f : A → B and g : A → B are defined to be equal, written f = g, if f (a) = g(a) for every a ∈ A —that is, if they have the same graph. Thus, we do not distinguish between a function and its graph. The negation of f = g is written f ≠ g and is the statement:

Sometimes the “barred” arrow ↦ is used to denote the image of an arbitrary element x ∈ A under a mapping f : A → B by writing
x ↦ f(x)
This is illustrated in the following example.
(a) Let f : R → R be the function that assigns to each real number x its square x2. We can denote this function by writing

Here the image of −3 is 9, so we may write f(−3) = 9. However, f−1 (9) = {3, −3}. Also, f(R) = [0, ∞) = {x : x ≥ 0} is the image of f.
(b) Let A = {a, b, c, d} and B = {x, y, z, t}. Then the following defines a mapping f : A → B :

The first defines the mapping explicitly, and the second defines the mapping by its graph. Here,

Furthermore, f(A) = {x, y, z} is the image of f.
EXAMPLE 5.2 Let V be the vector space of polynomials over R, and let p(t) = 3t2 − 5t + 2.
(a) The derivative defines a mapping D : V → V where, for any polynomials f(t), we have D(f) = df/dt. Thus,

(b) The integral, say from 0 to 1, defines a mapping J : V → R. That is, for any polynomial f(t),

Observe that the mapping in (b) is from the vector space V into the scalar field R, whereas the mapping in (a) is from the vector space V into itself.
Matrix Mappings
Let A be any m × n matrix over K. Then A determines a mapping FA : Kn → Km by
where the vectors in Kn and Km are written as columns. For example, suppose

then

Remark: For notational convenience, we will frequently denote the mapping FA by the letter A, the same symbol as used for the matrix.
Composition of Mappings
Consider two mappings f : A → B and g : B → C, illustrated below:
The composition of f and g, denoted by g ° f, is the mapping g ° f : A → C defined by

That is, first we apply f to a ∈ A, and then we apply g to f (a) ∈ B to get g(f (a)) ∈ C. Viewing f and g as “computers,” the composition means we first input a ∈ A to get the output f (a) ∈ B using f, and then we input f (a) to get the output g(f (a)) ∈ C using g.
Our first theorem tells us that the composition of mappings satisfies the associative law.
THEOREM 5.1: Let f : A → B, g : B → C, h : C → D. Then

We prove this theorem here. Let a ∈ A. Then

Thus, (h ° (g ° f))(a) = ((h ° g) ° f)(a) for every a ∈ A, and so h ° (g ° f) = (h ° g) ° f.
One-to-One and Onto Mappings
We formally introduce some special types of mappings.
DEFINITION: A mapping f : A → B is said to be one-to-one (or 1-1 or injective ) if different elements of A have distinct images; that is,

DEFINITION: A mapping f : A → B is said to be onto (or f maps A onto B or surjective ) if every b ∈ B is the image of at least one a ∈ A.
DEFINITION: A mapping f : A → B is said to be a one-to-one correspondence between A and B (or bijective) if f is both one-to-one and onto.
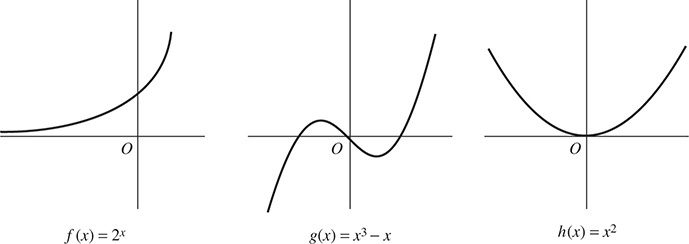
EXAMPLE 5.3 Let f : R → R, g : R → R, h : R → R be defined by

The graphs of these functions are shown in Fig. 5-1. The function f is one-to-one. Geometrically, this means that each horizontal line does not contain more than one point of f. The function g is onto. Geometrically, this means that each horizontal line contains at least one point of g. The function h is neither one-to-one nor onto. For example, both 2 and −2 have the same image 4, and −16 has no preimage.
Identity and Inverse Mappings
Let A be any nonempty set. The mapping f : A → A defined by f(a) = a—that is, the function that assigns to each element in A itself—is called identity mapping. It is usually denoted by 1A or 1 or I. Thus, for any a ∈ A, we have 1A(a) = a.
Now let f : A → B. We call g : B → A the inverse of f, written f−1, if

We emphasize that f has an inverse if and only if f is a one-to-one correspondence between A and B; that is, f is one-to-one and onto (Problem 5.7). Also, if b ∈ B, then f−1 (b) = a, where a is the unique element of A for which f(a) = b
5.3 Linear Mappings (Linear Transformations)
We begin with a definition.
DEFINITION: Let V and U be vector spaces over the same field K. A mapping F : V → U is called a linear mapping or linear transformation if it satisfies the following two conditions:
(1) For any vectors υ, w ∈ V, F(υ + w) = F(υ)+ F(w).
(2) For any scalar k and vector υ ∈ V, F(kυ) = kF(υ).
Namely, F : V → U is linear if it “preserves” the two basic operations of a vector space, that of vector addition and that of scalar multiplication.
Substituting k = 0 into condition (2), we obtain F(0) = 0. Thus, every linear mapping takes the zero vector into the zero vector.
Now for any scalars a, b ∈ K and any vector υ, w ∈ V, we obtain

More generally, for any scalars ai ∈ K and any vectors υi ∈ V, we obtain the following basic property of linear mappings:

Remark 1: A linear mapping F : V → U is completely characterized by the condition

and so this condition is sometimes used as its defintion.
Remark 2: The term linear transformation rather than linear mapping is frequently used for linear mappings of the form F : Rn → Rm.
(a) Let F : R3 → R3 be the “projection” mapping into the xy-plane; that is, F is the mapping defined by F(x, y, z) = (x, y, 0). We show that F is linear. Let υ = (a, b, c) and w = (a′, b′, c′). Then

and, for any scalar k,

Thus, F is linear.
(b) Let G : R2 → R2 be the “translation” mapping defined by G(x, y) = (x + 1, y + 2). [That is, G adds the vector (1, 2) to any vector υ = (x, y) in R2.] Note that

Thus, the zero vector is not mapped into the zero vector. Hence, G is not linear.
EXAMPLE 5.5 (Derivative and Integral Mappings) Consider the vector space V = P (t) of polynomials over the real field R. Let u(t) and υ(t) be any polynomials in V and let k be any scalar.
(a) Let D : V → V be the derivative mapping. One proves in calculus that

That is, D(u + υ) = D(u)+ D(υ) and D(ku) = kD(u). Thus, the derivative mapping is linear.
(b) Let J : V → R be an integral mapping, say
One also proves in calculus that,

and
That is, J(u + υ) = J(u) + J(υ) and J(ku) = kJ(u). Thus, the integral mapping is linear.
EXAMPLE 5.6 (Zero and Identity Mappings)
(a) Let F : V → U be the mapping that assigns the zero vector 0 ∈ U to every vector υ ∈ V. Then, for any vectors υ, w ∈ V and any scalar k ∈ K, we have

Thus, F is linear. We call F the zero mapping, and we usually denote it by 0.
(b) Consider the identity mapping I : V → V, which maps each υ ∈ V into itself. Then, for any vectors υ, w ∈ V and any scalars a, b ∈ K, we have

Thus, I is linear.
Our next theorem (proved in Problem 5.13) gives us an abundance of examples of linear mappings. In particular, it tells us that a linear mapping is completely determined by its values on the elements of a basis.
THEOREM 5.2: Let V and U be vector spaces over a field K. Let {υ1, υ2, …, υn} be a basis of V and let u1, u2, …, un be any vectors in U. Then there exists a unique linear mapping F : V → U such that F(υ1) = u1, F(υ2) = u2, …, F(υn) = un.
We emphasize that the vectors u1, u2, …, un in Theorem 5.2 are completely arbitrary; they may be linearly dependent or they may even be equal to each other.
Matrices as Linear Mappings
Let A be any real m × n matrix. Recall that A determines a mapping FA : Kn → Km by FA(u) = Au (where the vectors in Kn and Km are written as columns). We show FA is linear. By matrix multiplication,

In other words, using A to represent the mapping, we have

Thus, the matrix mapping A is linear.
Vector Space Isomorphism
The notion of two vector spaces being isomorphic was defined in Chapter 4 when we investigated the coordinates of a vector relative to a basis. We now redefine this concept.
DEFINITION: Two vector spaces V and U over K are isomorphic, written V ≅ U, if there exists a bijective (one-to-one and onto) linear mapping F : V → U. The mapping F is then called an isomorphism between V and U.
Consider any vector space V of dimension n and let S be any basis of V. Then the mapping
x ↦ (v)s
which maps each vector υ ∈ V into its coordinate vector [υ]S, is an isomorphism between V and Kn.
5.4 Kernel and Image of a Linear Mapping
We begin by defining two concepts.
DEFINITION: Let F : V → U be a linear mapping. The kernel of F, written Ker F, is the set of elements in V that map into the zero vector 0 in U; that is,

The image (or range) of F, written Im F, is the set of image points in U; that is,
Im F = fu ∈ U : there exists υ ∈ V for which F(υ) = u}
The following theorem is easily proved (Problem 5.22).
THEOREM 5.3: Let F : V → U be a linear mapping. Then the kernel of F is a subspace of V and the image of F is a subspace of U.
Now suppose that υ1, υ2, …, υm span a vector space V and that F : V → U is linear. We show that F(υ1), F(υ2), …, F(υm) span Im F. Let u ∈ Im F. Then there exists υ ∈ V such that F(υ) = u. Because the υi’s span V and υ ∈ V, there exist scalars a1, a2, …, am for which

Therefore,

Thus, the vectors F(υ1), F(υ2), …, F(υm) span Im F.
We formally state the above result.
PROPOSITION 5.4: Suppose υ1, υ2, …, υm span a vector space V, and suppose F : V → U is linear. Then F(υ1), F(υ2), …, F(υm) span Im F.
(a) Let F : R3 → R3 be the projection of a vector υ into the xy-plane [as pictured in Fig. 5-2(a)]; that is,

Clearly the image of F is the entire xy -plane—that is, points of the form (x, y, 0). Moreover, the kernel of F is the z-axis—that is, points of the form (0, 0, c ). That is,

(b) Let G : R3 → R3 be the linear mapping that rotates a vector υ about the z-axis through an angle θ [as pictured in Fig. 5-2(b)]; that is,

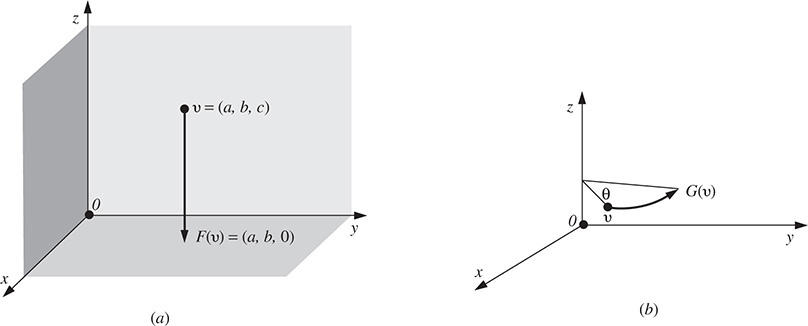
Observe that the distance of a vector υ from the origin O does not change under the rotation, and so only the zero vector 0 is mapped into the zero vector 0. Thus, Ker G = {0}. On the other hand, every vector u in R3 is the image of a vector υ in R3 that can be obtained by rotating u back by an angle of θ. Thus, Im G = R3, the entire space.
EXAMPLE 5.8 Consider the vector space V = P(t) of polynomials over the real field R, and let H : V → V be the third-derivative operator; that is, H[f(t) = d3f/dt3. [Sometimes the notation D3 is used for H, where D is the derivative operator.] We claim that

The first comes from the fact that H(at2 + bt + c) = 0 but H(tn) ≠ 0 for n ≥ 3. The second comes from that fact that every polynomial g(t) in V is the third derivative of some polynomial f(t) (which can be obtained by taking the antiderivative of g(t) three times).
Kernel and Image of Matrix Mappings
Consider, say, a 3 × 4 matrix A and the usual basis {e1, e2, e3, e4} of K4 (written as columns):

Recall that A may be viewed as a linear mapping A : K4 → K3, where the vectors in K4 and K3 are viewed as column vectors. Now the usual basis vectors span K4, so their images Ae1, Ae2, Ae3, Ae4 span the image of A. But the vectors Ae1, Ae2, Ae3, Ae4 are precisely the columns of A :

Thus, the image of A is precisely the column space of A.
On the other hand, the kernel of A consists of all vectors υ for which Aυ = 0. This means that the kernel of A is the solution space of the homogeneous system AX = 0, called the null space of A.
We state the above results formally.
PROPOSITION 5.5: Let A be any m × n matrix over a field K viewed as a linear map A : Kn → Km. Then

Here colsp(A) denotes the column space of A, and nullsp(A) denotes the null space of A.
Rank and Nullity of a Linear Mapping
Let F : V → U be a linear mapping. The rank of F is defined to be the dimension of its image, and the nullity of F is defined to be the dimension of its kernel; namely,

The following important theorem (proved in Problem 5.23) holds.
THEOREM 5.6 Let V be of finite dimension, and let F : V → U be linear. Then

Recall that the rank of a matrix A was also defined to be the dimension of its column space and row space. If we now view A as a linear mapping, then both definitions correspond, because the image of A is precisely its column space.
EXAMPLE 5.9 Let F : R4 → R3 be the linear mapping defined by

(a) Find a basis and the dimension of the image of F.
First find the image of the usual basis vectors of R4,

By Proposition 5.4, the image vectors span Im F. Hence, form the matrix M whose rows are these image vectors and row reduce to echelon form:
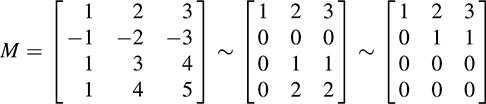
Thus, (1, 2, 3) and (0, 1, 1) form a basis of Im F. Hence, dim(Im F) = 2 and rank(F) = 2.
(b) Find a basis and the dimension of the kernel of the map F.
Set F(υ) = 0, where υ = (x, y, z, t),

Set corresponding components equal to each other to form the following homogeneous system whose solution space is Ker F :

The free variables are y and t. Hence, dim(Ker F) = 2 or nullity(F) = 2.
(i) Set y = 1, t = 0 to obtain the solution (1, 1, 0, 0),
(ii) Set y = 0, t = 1 to obtain the solution (1, 0, −2, 1).
Thus, (−1, 1, 0, 0) and (1, 0, −2, 1) form a basis for Ker F.
As expected from Theorem 5.6, dim(Im F) + dim(Ker F) = 4 = dim R4.
Application to Systems of Linear Equations
Let AX = B denote the matrix form of a system of m linear equations in n unknowns. Now the matrix A may be viewed as a linear mapping

Thus, the solution of the equation AX = B may be viewed as the preimage of the vector B ∈ Km under the linear mapping A. Furthermore, the solution of the associated homogeneous system

may be viewed as the kernel of the linear mapping A. Applying Theorem 5.6 to this homogeneous system yields

But n is exactly the number of unknowns in the homogeneous system AX = 0. Thus, we have proved the following theorem of Chapter 4.
THEOREM 4.19: The dimension of the solution space W of a homogenous system AX = 0 of linear equations is s = n − r, where n is the number of unknowns and r is the rank of the coefficient matrix A.
Observe that r is also the number of pivot variables in an echelon form of AX = 0, so s = n − r is also the number of free variables. Furthermore, the s solution vectors of AX = 0 described in Theorem 3.14 are linearly independent (Problem 4.52). Accordingly, because dim W = s, they form a basis for the solution space W. Thus, we have also proved Theorem 3.14.
5.5 Singular and Nonsingular Linear Mappings, Isomorphisms
Let F : V → U be a linear mapping. Recall that F(0) = 0. F is said to be singular if the image of some nonzero vector υ is 0—that is, if there exists υ ≠ 0 such that F(υ) = 0. Thus, F : V → U is nonsingular if the zero vector 0 is the only vector whose image under F is 0 or, in other words, if Ker F = {0}.
EXAMPLE 5.10 Consider the projection map F : R3 → R3 and the rotation map G : R3 → R3 appearing in Fig. 5-2. (See Example 5.7.) Because the kernel of F is the z-axis, F is singular. On the other hand, the kernel of G consists only of the zero vector 0. Thus, G is nonsingular.
Nonsingular linear mappings may also be characterized as those mappings that carry independent sets into independent sets. Specifically, we prove (Problem 5.28) the following theorem.
THEOREM 5.7: Let F : V → U be a nonsingular linear mapping. Then the image of any linearly independent set is linearly independent.
Isomorphisms
Suppose a linear mapping F : V → U is one-to-one. Then only 0 ∈ V can map into 0 ∈ U, and so F is nonsingular. The converse is also true. For suppose F is nonsingular and F(υ) = F(w), then F(υ − w) = F(υ) − F(w) = 0, and hence, υ w = 0 or υ = w. Thus, F(υ) = F(w) implies υ = w—that is, F is one-to-one. We have proved the following proposition.
PROPOSITION 5.8: A linear mapping F : V → U is one-to-one if and only if F is nonsingular.
Recall that a mapping F : V → U is called an isomorphism if F is linear and if F is bijective (i.e., if F is one-to-one and onto). Also, recall that a vector space V is said to be isomorphic to a vector space U, written V ≅ U, if there is an isomorphism F : V → U.
The following theorem (proved in Problem 5.29) applies.
THEOREM 5.9: Suppose V has finite dimension and dim V = dim U. Suppose F : V → U is linear. Then F is an isomorphism if and only if F is nonsingular.
5.6 Operations with Linear Mappings
We are able to combine linear mappings in various ways to obtain new linear mappings. These operations are very important and will be used throughout the text.
Let F : V → U and G : V → U be linear mappings over a field K. The sum F + G and the scalar product kF, where k ∈ K, are defined to be the following mappings from V into U :

We now show that if F and G are linear, then F + G and kF are also linear. Specifically, for any vectors υ, w ∈ V and any scalars a, b ∈ K,
and

Thus, F + G and kF are linear.
The following theorem holds.
THEOREM 5.10: Let V and U be vector spaces over a field K. Then the collection of all linear mappings from V into U with the above operations of addition and scalar multiplication forms a vector space over K.
The vector space of linear mappings in Theorem 5.10 is usually denoted by
Hom(V, U)
Here Hom comes from the word “homomorphism.” We emphasize that the proof of Theorem 5.10 reduces to showing that Hom(V, U) does satisfy the eight axioms of a vector space. The zero element of Hom(V, U) is the zero mapping from V into U, denoted by 0 and defined by

for every vector υ ∈ V.
Suppose V and U are of finite dimension. Then we have the following theorem.
THEOREM 5.11: Suppose dim V = m and dim U = n. Then dim[Hom(V, U) = mn.
Composition of Linear Mappings
Now suppose V, U, and W are vector spaces over the same field K, and suppose F : V → U and G : U → W are linear mappings. We picture these mappings as follows:

Recall that the composition function G ° F is the mapping from V into W defined by (G ° F)(υ) = G(F(υ)). We show that G ° F is linear whenever F and G are linear. Specifically, for any vectors v, w ∈ V and any scalars a, b ∈ K, we have

Thus, G ° F is linear.
The composition of linear mappings and the operations of addition and scalar multiplication are related as follows.
THEOREM 5.12: Let V, U, W be vector spaces over K. Suppose the following mappings are linear:

Then, for any scalar k ∈ K:
5.7 Algebra A(V) of Linear Operators
Let V be a vector space over a field K. This section considers the special case of linear mappings from the vector space V into itself—that is, linear mappings of the form F: V → V. They are also called linear operators or linear transformations on V. We will write A(V), instead of Hom(V, V), for the space of all such mappings.
Now A(V) is a vector space over K (Theorem 5.8), and, if dim V = n, then dim A(V) = n2. Moreover, for any mappings F, G ∈ A(V), the composition G ° F exists and also belongs to A(V). Thus, we have a “multiplication” defined in A(V). [We sometimes write FG instead of G ° F in the space A(V).]
Remark: An algebra A over a field K is a vector space over K in which an operation of multiplication is defined satisfying, for every F, G, H ∈ A and every k ∈ K:
(i) F(G + H) = FG + FH,
(ii) (G + H)F = GF + HF,
(iii) k(GF) = (kG)F = G(kF).
The algebra is said to be associative if, in addition, (FG)H = F(GH).
The above definition of an algebra and previous theorems give us the following result.
THEOREM 5.13: Let V be a vector space over K. Then A(V) is an associative algebra over K with respect to composition of mappings. If dim V = n, then dim A(V) = n2.
This is why A(V) is called the algebra of linear operators on V.
Polynomials and Linear Operators
Observe that the identity mapping I: V → V belongs to A(V). Also, for any linear operator F in A(V), we have FI = IF = F. We can also form “powers” of F. Namely, we define

Furthermore, for any polynomial p(t) over K, say,

we can form the linear operator p(F) defined by

(For any scalar k, the operator kI is sometimes denoted simply by k.) In particular, we say F is a zero of the polynomial p(t) if p(F) = 0.
EXAMPLE 5.11 Let F : K3 → K3 be defined by F(x, y, z) = (0, x, y). For any (a, b, c) ∈ K3,

Thus, F3 = 0, the zero mapping in A(V). This means F is a zero of the polynomial p(t) = t3.
Square Matrices as Linear Operators
Let M = Mn,n be the vector space of all square n × n matrices over K. Then any matrix A in M defines a linear mapping FA : Kn → Kn by FA(u) = Au (where the vectors in Kn are written as columns). Because the mapping is from Kn into itself, the square matrix A is a linear operator, not simply a linear mapping.
Suppose A and B are matrices in M. Then the matrix product AB is defined. Furthermore, for any (column) vector u in Kn,

In other words, the matrix product AB corresponds to the composition of A and B as linear mappings. Similarly, the matrix sum A + B corresponds to the sum of A and B as linear mappings, and the scalar product kA corresponds to the scalar product of A as a linear mapping.
Invertible Operators in A(V)
Let F: V → V be a linear operator. F is said to be invertible if it has an inverse—that is, if there exists F-1 in A(V) such that FF-1 = F-1F = I. On the other hand, F is invertible as a mapping if F is both one-to-one and onto. In such a case, F-1 is also linear and F-1 is the inverse of F as a linear operator (proved in Problem 5.15).
Suppose F is invertible. Then only 0 ∈ V can map into itself, and so F is nonsingular. The converse is not true, as seen by the following example.
EXAMPLE 5.12 Let V = P (t), the vector space of polynomials over K. Let F be the mapping on V that increases by 1 the exponent of t in each term of a polynomial; that is,

Then F is a linear mapping and F is nonsingular. However, F is not onto, and so F is not invertible.
The vector space V = P (t) in the above example has infinite dimension. The situation changes significantly when V has finite dimension. Namely, the following theorem applies.
THEOREM 5.14: Let F be a linear operator on a finite-dimensional vector space V. Then the following four conditions are equivalent.

The proof of the above theorem mainly follows from Theorem 5.6, which tells us that

By Proposition 5.8, (i) and (ii) are equivalent. Note that (iv) is equivalent to (ii) and (iii). Thus, to prove the theorem, we need only show that (i) and (iii) are equivalent. This we do below.
(a) Suppose (i) holds. Then dim(Ker F) = 0, and so the above equation tells us that dim V = dim(Im F). This means V = Im F or, in other words, F is an onto mapping. Thus, (i) implies (iii).
(b) Suppose (iii) holds. Then V = Im F, and so dim V = dim(Im F). Therefore, the above equation tells us that dim(Ker F) = 0, and so F is nonsingular. Therefore, (iii) implies (i).
Accordingly, all four conditions are equivalent.
Remark: Suppose A is a square n × n matrix over K. Then A may be viewed as a linear operator on Kn. Because Kn has finite dimension, Theorem 5.14 holds for the square matrix A. This is why the terms “nonsingular” and “invertible” are used interchangeably when applied to square matrices.
EXAMPLE 5.13 Let F be the linear operator on R2 defined by F(x, y) = (2x + y, 3x + 2y).
(a) To show that F is invertible, we need only show that F is nonsingular. Set F(x, y) = (0, 0) to obtain the homogeneous system 2x + y = 0 and 3x + 2y = 0

Solve for x and y to get x = 0, y = 0. Hence, F is nonsingular and so invertible.
(b) To find a formula for F-1, we set F(x, y) = (s, t) and so F-1 (s, t) = (x, y). We have

Solve for x and y in terms of s and t to obtain x = 2s – t, y = – 3s + 2t. Thus,

where we rewrite the formula for F-1 using x and y instead of s and t.
SOLVED PROBLEMS
Mappings
5.1. State whether each diagram in Fig. 5-3 defines a mapping from A = {a, b, c} into B = {x, y, z}.
(a) No. There is nothing assigned to the element b ∈ A.
(b) No. Two elements, x and z, are assigned to c ∈ A.
(c) Yes.

5.2. Let f : A → B and g : B → C be defined by Fig. 5-4.
(a) Find the composition mapping (g ° f) : A → C.
(b) Find the images of the mappings f , g, g ° f.
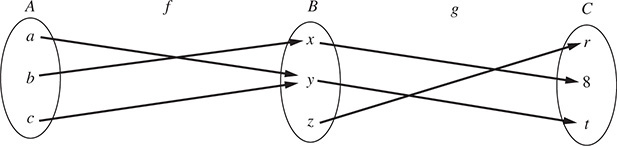
(a) Use the definition of the composition mapping to compute

Observe that we arrive at the same answer if we “follow the arrows” in Fig. 5-4:

(b) By Fig. 5-4, the image values under the mapping f are x and y, and the image values under g are r, s, t.

Also, by part (a), the image values under the composition mapping g ° f are t and s; accordingly, Im g ° f = {s, t}. Note that the images of g and g ° f are different.
5.3. Consider the mapping F : R3 → R2 defined by F(x, y, z) = (yz, x2). Find
(a) F(2, 3, 4); (b) F(5, 2, 7); (c) F-1 (0, 0), that is, all υ ∈ R3 such that F(υ) = 0.
(a) Substitute in the formula for F to get F(2, 3, 4) = (3 ˙ 4, 22) = (12, 4).
(b) F(5, -2, 7) = (-2 ˙ 7, 52) = (14, 25).
(c) Set F(υ) = 0, where υ = (x, y, z), and then solve for x, y, z:

Thus, x = 0 and either y = 0 or z = 0. In other words, x = 0, y = 0 or x = 0, z = 0—that is, the z-axis and the y-axis.
5.4. Consider the mapping F : R2 → R2 defined by F(x, y) = (3y, 2x). Let S be the unit circle in R2, that is, the solution set of x2 + y2 = 1. (a) Describe F(S). (b) Find F-1 (S).
(a) Let (a, b) be an element of F(S). Then there exists (x, y) ∈ S such that F(x, y) = (a, b). Hence,

Because (x, y) ∈ S—that is, x2 + y2 = 1—we have

Thus, F(S) is an ellipse.
(b) Let F(x, y) = (a, b), where (a, b) ∈ S. Then (3y, 2x) = (a, b) or 3y = a, 2x = b. Because (a, b) ∈ S, we have a2 + b2 = 1. Thus, (3y)2 +(2x)2 = 1. Accordingly, F-1 (S) is the ellipse 4x2 + 9y2 = 1.
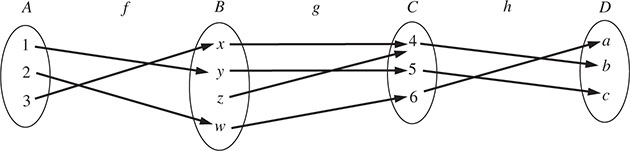
5.5. Let the mappings f : A → B, g : B → C, h : C → D be defined by Fig. 5-5. Determine whether or not each function is (a) one-to-one; (b) onto; (c) invertible (i.e., has an inverse).
(a) The mapping f : A → B is one-to-one, as each element of A has a different image. The mapping g : B → C is not one-to one, because x and z both have the same image 4. The mapping h : C → D is one-to-one.
(b) The mapping f : A → B is not onto, because z ∈ B is not the image of any element of A. The mapping g : B → C is onto, as each element of C is the image of some element of B. The mapping h : C → D is also onto.
(c) A mapping has an inverse if and only if it is one-to-one and onto. Hence, only h has an inverse.
5.6. Suppose f : A → B and g : B → C. Hence, (g ° f) : A → C exists. Prove
(a) If f and g are one-to-one, then g ° f is one-to-one.
(b) If f and g are onto mappings, then g ° f is an onto mapping.
(c) If g ° f is one-to-one, then f is one-to-one.
(d) If g ° f is an onto mapping, then g is an onto mapping.
(a) Suppose (g ° f)(x) = (g ° f)(y). Then g(f (x)) = g(f (y)). Because g is one-to-one, f (x) = f (y). Because f is one-to-one, x = y. We have proven that (g ° f)(x) = (g ° f)(y) implies x = y; hence g ° f is one-to-one.
(b) Suppose c ∈ C. Because g is onto, there exists b ∈ B for which g(b) = c. Because f is onto, there exists a ∈ A for which f (a) = b. Thus, (g ° f)(a) = g(f (a)) = g(b) = c. Hence, g ° f is onto.
(c) Suppose f is not one-to-one. Then there exist distinct elements x, y ∈ A for which f (x) = f (y). Thus, (g ° f)(x) = g(f (x)) = g(f (y)) = (g ° f)(y). Hence, g ° f is not one-to-one. Therefore, if g ° f is one-toone, then f must be one-to-one.
(d) If a ∈ A, then (g ° f)(a) = g(f (a)) ∈ g(B). Hence, (g ° f)(A) ⊆ g(B). Suppose g is not onto. Then g(B) is properly contained in C and so (g ° f)(A) is properly contained in C; thus, g ° f is not onto. Accordingly, if g ° f is onto, then g must be onto.
5.7. Prove that f : A → B has an inverse if and only if f is one-to-one and onto.
Suppose f has an inverse—that is, there exists a function f-1 : B → A for which f-1 °f = 1A and f ° f-1 = 1B. Because1A is one-to-one, f is one-to-one by Problem 5.6(c), and because 1B is onto, f is onto by Problem 5.6(d); that is, f is both one-to-one and onto.
Now suppose f is both one-to-one and onto. Then each b ∈ B is the image of a unique element in A, say b*. Thus, if f (a) = b, then a = b*; hence, f (b*) = b. Now let g denote the mapping from B to A defined by b ↦ b*. We have
(i) (g ° f)(a) = g(f (a)) = g(b) = b* = a for every a ∈ A; hence, g ° f = 1A.
(ii) (f ° g)(b) = f (g(b)) = f (b*) = b for every b ∈ B; hence, f ° g = 1B.
Accordingly, f has an inverse. Its inverse is the mapping g.
5.8. Let f : R → R be defined by f (x) = 2x 3. Now f is one-to-one and onto; hence, f has an inverse mapping f-1. Find a formula for f-1.
Let y be the image of x under the mapping f; that is, y = f (x)= 2x – 3. Hence, x will be the image of y under the inverse mapping f-1. Thus, solve for x in terms of y in the above equation to obtain  . Then the formula defining the inverse function is
. Then the formula defining the inverse function is  , or, using x instead of
, or, using x instead of  .
.
Linear Mappings
5.9. Suppose the mapping F : R2 → R2 is defined by F(x, y) = (x + y, x). Show that F is linear.
We need to show that F(υ + w) = F(υ)+ F(w) and F(kυ) = kF(υ), where u and υ are any elements of R2 and k is any scalar. Let υ = (a, b) and w = (a', b'). Then

We have F(υ) = (a + b, a) and F(w) = (a' + b', a'). Thus,

and

Because υ, w, k were arbitrary, F is linear.
5.10. Suppose F : R3 → R2 is defined by F(x, y, z) = (x + y + z, 2x – 3y + 4z). Show that F is linear.
We argue via matrices. Writing vectors as columns, the mapping F may be written in the form F(υ) = Aυ, where υ = [x, y, z]T and
Then, using properties of matrices, we have

and
Thus, F is linear.
5.11. Show that the following mappings are not linear:
(a) F : R2 → R2 defined by F(x, y) = (xy, x)
(b) F : R2 → R3 defined by F(x, y) = (x + 3, 2y, x + y)
(c) F : R3 → R2 defined by F(x, y, z) = (|x|, y + z)
(a) Let υ = (1, 2) and w = (3, 4); then υ + w = (4, 6). Also,

Hence,

(b) Because F(0, 0) = (3, 0, 0) ≠ (0, 0, 0), F cannot be linear.
(c) Let υ = (1, 2, 3) and k = -3. Then kυ = (-3, -6, -9). We have

Thus,

Accordingly, F is not linear.
5.12. Let V be the vector space of n-square real matrices. Let M be an arbitrary but fixed matrix in V. Let F : V → V be defined by F(A) = AM + MA, where A is any matrix in V. Show that F is linear.
For any matrices A and B in V and any scalar k, we have

and

Thus, F is linear.
5.13. Prove Theorem 5.2: Let V and U be vector spaces over a field K. Let {υ1, υ2,…, υn} be a basis of V and let u1, u2,…, un be any vectors in U. Then there exists a unique linear mapping F : V → U such that F(υ1) = u1, F(υ2) = u2,…, F(υn) = un.
There are three steps to the proof of the theorem: (1) Define the mapping F : V → U such that F(υi) = ui, i = 1,…, n. (2) Show that F is linear. (3) Show that F is unique.
Step 1. Let υ ∈ V. Because {υ1,…, υn} is a basis of V, there exist unique scalars a1,…, an ∈ K for which υ = a1υ1 + a2υ2 + + anυn. We define F : V ∈ U by

(Because the ai are unique, the mapping F is well defined.) Now, for i = 1,…, n,

Hence,

Thus, the first step of the proof is complete.
Step 2. Suppose υ = a1υ1 + a2υ2 +…+ anυn and w = b1υ1 + b2υ2+…+ bnυn. Then

and, for any k ∈ K, kυ = ka1υ1 + ka2υ2 + … + kanυn. By definition of the mapping F,

Hence

and

Thus, F is linear.
Step 3. Suppose G : V → U is linear and G(υi) = ui, i = 1,…, n. Let

Then

Because G(υ) = F(υ) for every υ ∈ V, G = F. Thus, F is unique and the theorem is proved.
5.14. Let F : R2 → R2 be the linear mapping for which F(1, 2) = (2, 3) and F(0, 1) = (1, 4). [Note that {(1, 2), (0, 1)} is a basis of R2, so such a linear map F exists and is unique by Theorem 5.2.] Find a formula for F; that is, find F(a, b).
Write (a, b) as a linear combination of (1, 2) and (0, 1) using unknowns x and y,

Solve for x and y in terms of a and b to get x = a, y = -2a + b. Then

5.15. Suppose a linear mapping F : V → U is one-to-one and onto. Show that the inverse mapping F-1 : U → V is also linear.
Suppose u, u' ∈ U. Because F is one-to-one and onto, there exist unique vectors υ, υ' ∈ V for which F(υ) = u and F(υ') = u'. Because F is linear, we also have

By definition of the inverse mapping,

Then

Thus, F-1 is linear.
Kernel and Image of Linear Mappings
5.16. Let F : R4 → R3 be the linear mapping defined by

Find a basis and the dimension of (a) the image of F, (b) the kernel of F.
(a) Find the images of the usual basis of R4:

By Proposition 5.4, the image vectors span Im F. Hence, form the matrix whose rows are these image vectors, and row reduce to echelon form:
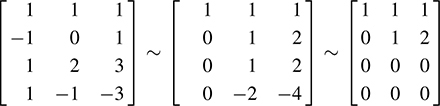
Thus, (1, 1, 1) and (0, 1, 2) form a basis for Im F; hence, dim(Im F) = 2.
(b) Set F(υ) = 0, where υ = (x, y, z, t); that is, set

Set corresponding entries equal to each other to form the following homogeneous system whose solution space is Ker F:

The free variables are z and t. Hence, dim(Ker F) = 2.

Thus, (2, 1, 1, 0) and (1, 2, 0, 1) form a basis of Ker F.
[As expected, dim(Im F) + dim(Ker F) = 2 + 2 = 4 = dim R4, the domain of F.]
5.17. Let G : R3 → R3 be the linear mapping defined by

Find a basis and the dimension of (a) the image of G, (b) the kernel of G.
(a) Find the images of the usual basis of R3:

By Proposition 5.4, the image vectors span Im G. Hence, form the matrix M whose rows are these image vectors, and row reduce to echelon form:

Thus, (1, 0, 1) and (0, 1, 1) form a basis for Im G; hence, dim(Im G) = 2.
(b) Set G(υ) = 0, where υ = (x, y, z); that is,

Set corresponding entries equal to each other to form the following homogeneous system whose solution space is Ker G:

The only free variable is z; hence, dim(Ker G) = -1. Set z = -1; then y = -1 and x = 3. Thus, (3, -1, 1) forms a basis of Ker G. [As expected, dim(Im G)+ dim(Ker G) = 2 + 1 = 3 = dim R3, the domain of G.]
5.18. Consider the matrix mapping A : R4 → R3, where  . Find a basis and the dimension of (a) the image of A, (b) the kernel of A.
. Find a basis and the dimension of (a) the image of A, (b) the kernel of A.
(a) The column space of A is equal to Im A. Now reduce AT to echelon form:
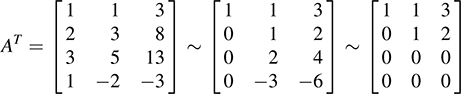
Thus, {(1, 1, 3), (0, 1, 2)} is a basis of Im A, and dim(Im A) = 2.
(b) Here Ker A is the solution space of the homogeneous system AX = 0, where X = {x, y, z, t)T. Thus, reduce the matrix A of coefficients to echelon form:

The free variables are z and t. Thus, dim(Ker A) = 2.
(i) Set z = 1, t = 0 to get the solution (1, -2, 1, 0).
(ii) Set z = 0, t = 1 to get the solution (-7, 3, 0, 1).
Thus, (1, -2, 1, 0) and (-7, 3, 0, 1) form a basis for Ker A.
5.19. Find a linear map F : R3 → R4 whose image is spanned by (1, 2, 0, -4) and (2, 0, -1, -3).
Form a 4× 3 matrix whose columns consist only of the given vectors, say
Recall that A determines a linear map A : R3 → R4 whose image is spanned by the columns of A. Thus, A satisfies the required condition.
5.20. Suppose f : V → U is linear with kernel W, and that f (υ) = u. Show that the “coset” υ + W = {υ + w : w ∈ W} is the preimage of u; that is, f-1 (u) = υ + W.
We must prove that (i) f-1 (u) υ + W and (ii) υ + W ⊆ f-1 (u).
We first prove (i). Suppose υ' ∈ f-1. Then f (υ') = u, and so

that is, υ' - υ ∈ W. Thus, υ = υ +(υ' - υ) ∈ υ + W, and hence f-1 (u) ⊆ υ + W.
Now we prove (ii). Suppose υ' ∈ υ + W. Then υ' = υ + w, where w ∈ W. Because W is the kernel of f, we have f (w) = 0. Accordingly,

Thus, υ' ∈ f-1
Both inclusions imply f-1 (u) = υ + W.
5.21. Suppose F : V → U and G : U → W are linear. Prove
(a) rank(G ° F) ≤ rank(G),
(b) rank(G ° F) ≤ rank(F).
(a) Because F(V) ⊆ U, we also have G(F(V)) ⊆ G(U), and so dim [G(F(V)) ≤ dim [G(U). Then rank(G ° F) = dim[(G ° F)(V) = dim [G(F(V)) ⊆ dim [G(U) = rank(G).
(b) We have dim [G(F(V)) ⊆ dim [F(V). Hence, rank(G ° F) = dim[(G ° F)(V) = dim [G(F(V)) ⊆ dim [F(V) = rank(F)
5.22. Prove Theorem 5.3: Let F : V → U be linear. Then,
(a) Im F is a subspace of U, (b) Ker F is a subspace of V.
(a) Because F(0) = 0, we have 0 ∈ Im F. Now suppose u, u' ∈ Im F and a, b ∈ K. Because u and u' belong to the image of F, there exist vectors υ, υ' ∈ V such that F(υ) = u and F(υ') = u'. Then

Thus, the image of F is a subspace of U.
(b) Because F(0) = 0, we have 0 ∈ Ker F. Now suppose υ, w ∈ Ker F and a, b ∈ K. Because υ and w belong to the kernel of F, F(υ) = 0 and F(w) = 0. Thus,

Thus, the kernel of F is a subspace of V.
5.23. Prove Theorem 5.6: Suppose V has finite dimension and F : V → U is linear. Then

Suppose dim(Ker F) = r and {w1,…, wr} is a basis of Ker F, and suppose dim(Im F) = s and {u1,…, us} is a basis of Im F. (By Proposition 5.4, Im F has finite dimension.) Because every uj ∈ Im F, there exist vectors υ1,…, υs in V such that F(υ1) = u1,…, F(υs) = us. We claim that the set

is a basis of V; that is, (i) B spans V, and (ii) B is linearly independent. Once we prove (i) and (ii), then dim V = r + s = dim(Ker F)+ dim(Im F).
(i) B spans V. Let υ ∈ V. Then F(υ) ∈ Im F. Because the uj span Im F, there exist scalars a1,…, as such that F(υ) = a1u1 +…+ asus. Set  . Then
. Then

Thus,  Ker F. Because the wi span Ker F, there exist scalars b1,…, br, such that
Ker F. Because the wi span Ker F, there exist scalars b1,…, br, such that

Accordingly,

Thus, B spans V.
(ii) B is linearly independent. Suppose

where xi, yj ∈ K. Then

But F(wi) = 0, since wi ∈ Ker F, and F(υj) = uj. Substituting into (2), we will obtain y1u1 + + ysus = 0. Since the uj are linearly independent, each yj = 0. Substitution into (1) gives x1w1 +…+ xrwr = 0. Since the wi are linearly independent, each xi = 0. Thus B is linearly independent.
Singular and Nonsingular Linear Maps, Isomorphisms
5.24. Determine whether or not each of the following linear maps is nonsingular. If not, find a nonzero vector v whose image is 0.
(a) F : R2 ∈ R2 defined by F(x, y) = (x – y, x – y).
(b) G : R2 ∈ R2 defined by G(x, y) = (2x – 4y, 3x – 6y).
(a) Find Ker F by setting F(υ) = 0, where υ = (x, y),

The only solution is x = 0, y = 0. Hence, F is nonsingular.
(b) Set G(x, y) = (0, 0) to find Ker G:

The system has nonzero solutions, because y is a free variable. Hence, G is singular. Let y = 1 to obtain the solution υ = (2, 1), which is a nonzero vector, such that G(υ) = 0.
5.25. The linear map F : R2 → R2 defined by F(x, y) = (x – y, x – 2y) is nonsingular by the previous Problem 5.24. Find a formula for F-1
Set F(x, y) = (a, b), so that F-1 (a, b) = (x, y). We have

Solve for x and y in terms of a and b to get x = 2a –b, y = a – b. Thus,

(The second equation is obtained by replacing a and b by x and y, respectively.)
5.26. Let G : R2 → R3 be defined by G(x, y) = (x + y, x – 2y, 3x + y).
(a) Show that G is nonsingular. (b) Find a formula for G-1.
(a) Set G(x, y) = (0, 0, 0) to find Ker G. We have

The only solution is x = 0, y = 0; hence, G is nonsingular.
(b) Although G is nonsingular, it is not invertible, because R2 and R3 have different dimensions. (Thus, Theorem 5.9 does not apply.) Accordingly, G-1 does not exist.
5.27. Suppose that F : V ∈ U is linear and that V is of finite dimension. Show that V and the image of F have the same dimension if and only if F is nonsingular. Determine all nonsingular linear mappings T : R4 ∈ R3.
By Theorem 5.6, dim V = dim(Im F)+ dim(Ker F). Hence, V and Im F have the same dimension if and only if dim(Ker F) = 0 or Ker F = {0} (i.e., if and only if F is nonsingular).
Because dim R3 is less than dim R4, we have that dim(Im T) is less than the dimension of the domain R4 of T. Accordingly no linear mapping T : R4 ∈ R3 can be nonsingular.
5.28. Prove Theorem 5.7: Let F : V ∈ U be a nonsingular linear mapping. Then the image of any linearly independent set is linearly independent.
Suppose υ1, υ2,…, υn are linearly independent vectors in V. We claim that F(υ1), F(υ2),…, F(υn) are also linearly independent. Suppose a1F(υ1) + a2F(υ2) +…+ anF(υn) = 0, where ai ∈ K. Because F is linear, F(a1υ1 + a2υ2 +…+ anυn) = 0. Hence,

But F is nonsingular—that is, Ker F = {0}. Hence, a1υ1 + a2υ2 +…+ anυn = 0. Because the υi are linearly independent, all the ai are 0. Accordingly, the F(vi) are linearly independent. Thus, the theorem is proved.
5.29. Prove Theorem 5.9: Suppose V has finite dimension and dim V = dim U. Suppose F : V → U is linear. Then F is an isomorphism if and only if F is nonsingular.
If F is an isomorphism, then only 0 maps to 0; hence, F is nonsingular. Conversely, suppose F is nonsingular. Then dim(Ker F) = 0. By Theorem 5.6, dim V = dim(Ker F)+ dim(Im F). Thus,

Because U has finite dimension, Im F = U. This means F maps V onto U. Thus, F is one-to-one and onto; that is, F is an isomorphism.
Operations with Linear Maps
5.30. Define F : R3 → R2 and G : R3 → R2 by F(x, y, z) = (2x, y + z) and G(x, y, z) = (x – z, y). Find formulas defining the maps: (a) F + G, (b) 3F, (c) 2F – 5G.

5.31. Let F : R3 → R2 and G : R2 → R2 be defined by F(x, y, z) = (2x, y + z) and G(x, y) = (y, x). Derive formulas defining the mappings: (a) G F, (b) F ° G.
(a) (G ° F)(x, y, z) = G(F(x, y, z)) = G(2x, y + z) = (y + z, 2x)
(b) The mapping F ° G is not defined, because the image of G is not contained in the domain of F.
5.32. Prove: (a) The zero mapping 0, defined by 0(υ) = 0 ∈ U for every υ ∈ V, is the zero element of Hom(V, U). (b) The negative of F ∈ Hom(V, U) is the mapping (1)F, that is, F = ( 1)F.
Let F ∈ Hom(V, U). Then, for every υ ∈ V:

Because (F + 0)(υ) = F(υ) for every υ ∈ V, we have F + 0 = F. Similarly, 0 + F = F:

Thus, F +(-1)F = 0: Similarly (1)F + F = 0: Hence, -F = (-1)F:
5.33. Suppose F1, F2,…, Fn are linear maps from V into U. Show that, for any scalars a1, a2,…, an, and for any υ ∈ V,

The mapping a1F1 is defined by (a1F1)(υ) = a1F(υ). Hence, the theorem holds for n = 1. Accordingly, by induction,

5.34. Consider linear mappings F : R3 → R2, G : R3 → R2, H : R3 → R2 defined by

Show that F, G, H are linearly independent [as elements of Hom(R3; R2)].
Suppose, for scalars a; b; c ∈ K,

(Here 0 is the zero mapping.) For e1 = (1; 0; 0) ∈ R3, we have 0(e1) = (0; 0) and

Thus by (1), (a + 2b; a + b + c) = (0; 0) and so

Similarly for e2 = (0; 1; 0) ∈ R3, we have 0(e2) = (0; 0) and

Thus,

Using (2) and (3), we obtain

Because (1) implies (4), the mappings F, G, H are linearly independent.
5.35. Let k be a nonzero scalar. Show that a linear map T is singular if and only if kT is singular. Hence, T is singular if and only if T is singular.
Suppose T is singular. Then T(υ) = 0 for some vector υ ≠ 0. Hence,

and so kT is singular.
Now suppose kT is singular. Then (kT)(w) = 0 for some vector w ≠ 0. Hence,

But k ≠ 0 and w ≠ 0 implies kw ≠ 0. Thus, T is also singular.
5.36. Find the dimension d of:
(a) Hom(R3; R4), (b) Hom(R5; R3), (c) Hom(P3(t); R2), (d) Hom(M2;3; R4).
Use dim [Hom(V; U) = mn, where dim V = m and dim U = n.
(a) d = 3(4) = 12.
(b) d = 5(3) = 15.
(c) Because dim P3(t) = 4, d = 4(2) = 8.
(d) Because dim M2;3 = 6, d = 6(4) = 24.
5.38. Prove Theorem 5.11. Suppose dim V = m and dim U = n. Then dim [Hom(V; U) = mn.
Suppose fv1; …, vmg is a basis of V and {u1; …, un} is a basis of U. By Theorem 5.2, a linear mapping in Hom(V; U) is uniquely determined by arbitrarily assigning elements of U to the basis elements υi of V.We define

to be the linear mapping for which Fij(υi) = uj, and Fij(υk) = 0 for k ≠ i. That is, Fij maps υi into uj and the other υ’s into 0. Observe that {Fij} contains exactly mn elements; hence, the theorem is proved if we show that it is a basis of Hom(V; U).
Proof that {Fij} generates Hom(V; U). Consider an arbitrary function F 2 Hom(V; U). Suppose F(υ1) = w1; F(υ2) = w2; …, F(υm) = wm. Because wk 2 U, it is a linear combination of the u’s; say,

Consider the linear mapping  . Because G is a linear combination of the Fij, the proof that {Fij} generates Hom(V; U) is complete if we show that F = G.
. Because G is a linear combination of the Fij, the proof that {Fij} generates Hom(V; U) is complete if we show that F = G.
We now compute G(υk); k = 1; …, m. Because Fij(υk) = 0 for k ≠ i and Fki(υk) = ui,

Thus, by (1), G(υk) = wk for each k. But F(υk) = wk for each k. Accordingly, by Theorem 5.2, F = G; hence, {Fij} generates Hom(V; U).
Proof that {Fij} is linearly independent. Suppose, for scalars cij ∈ K,
For υk; k = 1; …, m,

But the ui are linearly independent; hence, for k = 1; …, m, we have ck1 = 0; ck2 = 0; …, ckn = 0. In other words, all the cij = 0, and so {Fij} is linearly independent.
5.38. Prove Theorem 5.12: (i) G ° (F + F') = G ° F + G ° F'. (ii) (G + G') ° F = G ° F + G' ° F. (iii) k(G ° F) = (kG) ° F = G ° (kF).
(i) For every υ ∈ V,

Thus, G (F + F') = G ° F + G ° F'.
(ii) For every υ ∈ V,

Thus, (G + G') ° F = G ° F + G' ° F.

and

Accordingly, k(G ° F) = (kG) ° F = G ° (kF). (We emphasize that two mappings are shown to be equal by showing that each of them assigns the same image to each point in the domain.)
Algebra of Linear Maps
5.39. Let F and G be the linear operators on R2 defined by F(x; y) = (y; x) and G(x; y) = (0; x). Find formulas defining the following operators:
(a) F + G, (b) 2F – 3G, (c) FG, (d) GF, (e) F2, (f) G2.
(a) (F + G)(x; y) = F(x; y)+ G(x; y) = (y; x)+(0; x) = (y; 2x).
(b) (2F – 3G)(x; y) = 2F(x; y) 3G(x; y) = 2(y; x) 3(0; x) = (2y; x).
(c) (FG)(x; y) = F(G(x; y)) = F(0; x) = (x; 0).
(d) (GF)(x; y) = G(F(x; y)) = G(y; x) = (0; y).
(e) F2(x; y) = F(F(x; y)) = F(y; x) = (x; y). (Note that F2 = I, the identity mapping.)
(f) G2(x; y) = G(G(x; y)) = G(0; x) = (0; 0). (Note that G2 = 0, the zero mapping.)
5.40. Consider the linear operator T on R3 defined by T(x; y; z) = (2x; 4x – y; 2x + 3y – z).
(a) Show that T is invertible. Find formulas for (b) T-1, (c) T2, (d) T-2.
(a) Let W = Ker T. We need only show that T is nonsingular (i.e., that W = {0}). Set T(x; y; z)= (0; 0; 0), which yields

Thus, W is the solution space of the homogeneous system

which has only the trivial solution (0, 0, 0). Thus, W = {0}. Hence, T is nonsingular, and so T is invertible.
(b) Set T(x; y; z) = (r; s; t) [and so T-1(r; s; t) = (x; y; z)]. We have

Solve for x, y, z in terms of r, s, t to get  , y = 2r – s, z = 7r – 3s – t. Thus,
, y = 2r – s, z = 7r – 3s – t. Thus,

(c) Apply T twice to get

(d) Apply T

5.41. Let V be of finite dimension and let T be a linear operator on V for which TR = I, for some operator R on V. (We call R a right inverse of T.)
(a) Show that T is invertible. (b) Show that R = T-1.
(c) Give an example showing that the above need not hold if V is of infinite dimension.
(a) Let dim V = n. By Theorem 5.14, T is invertible if and only if T is onto; hence, T is invertible if and only if rank(T) = n. We have n = rank(I) = rank(TR) ≤ rank(T) ≤ n. Hence, rank(T) = n and T is invertible.
(b) TT-1 = T-1 T = I. Then R = IR = (T-1T)R = T-1 (TR) = T-1 I = T-1.
(c) Let V be the space of polynomials in t over K; say, p(t) = a0 + a1t + a2t2 +…+ asts. Let T and R be the operators on V defined by

We have

and so TR = I, the identity mapping. On the other hand, if k ∈ K and k ≠ 0, then

Accordingly, RT ≠ I.
5.42. Let F and G be linear operators on R2 defined by F(x; y) = (0; x) and G(x; y) = (x; 0). Show that
(a) GF = 0, the zero mapping, but FG ≠ 0.
(b) G2 = G. (a) (GF)(x; y) = G(F(x; y)) = G(0; x) = (0; 0). Because GF assigns 0 = (0; 0) to every vector (x; y)in R2,it is the zero mapping; that is, GF = 0.
On the other hand, (FG)(x; y) = F(G(x; y)) = F(x; 0) = (0; x). For example, (FG)(2; 3) = (0; 2). Thus, FG ≠ 0, as it does not assign 0 = (0; 0) to every vector in R2.
(b) For any vector (x; y) in R2, we have G2(x; y)= G(G(x; y)) = G(x; 0)= (x; 0)= G(x; y). Hence, G2 = G.
5.43. Find the dimension of (a) A(R4), (b) A(P2(t)), (c) A(M2;3).
Use dim [A(V) = n2 where dim V = n. Hence, (a) dim [A(R4) = 42 = 16, (b) dim [A(P2(t)) = 32 = 9, (c) dim [A(M2;3) = 62 = 36.
5.44. Let E be a linear operator on V for which E2 = E. (Such an operator is called a projection.) Let U be the image of E, and let W be the kernel. Prove
(a) If u ∈ U, then E(u) = u (i.e., E is the identity mapping on U).
(b) If E ≠ I, then E is singular—that is, E(υ) = 0 for some υ ≠ 0.
(c) V = U ⊕ W.
(a) If u ∈ U, the image of E, then E(υ) = u for some υ ∈ V. Hence, using E2 = E, we have

(b) If E ≠ I, then for some υ ∈ V, E(υ) = u, where υ ≠ u. By (i), E(u) = u. Thus,

(c) We first show that V = U + W. Let υ ∈ V. Set u = E(υ) and w = υ – E(υ). Then

By deflnition, u = E(υ) ∈ U, the image of E. We now show that w ∈ W, the kernel of E,

and thus w ∈ W. Hence, V = U + W.
We next show that U ∩ W = {0}. Let υ ∈ U ∩ W. Because υ ∈ U, E(υ) = υ by part (a). Because υ ∈ W, E(υ) = 0. Thus, υ = E(υ) = 0 and so U ∩ W = {0}.
The above two properties imply that V = U ⊕ W.
Mappings
5.45. Determine the number of different mappings from (a) {1; 2} into {1; 2; 3}; (b) {1; 2; …, r} into {1; 2; …, s}:
5.46. Let f : R → R and g : R → R be defined by f (x) = x2 + 3x + 1 and g(x) = 2x – 3. Find formulas defining the composition mappings: (a) f ° g; (b) g ° f ; (c) g ° g; (d) f ° f.
5.47. For each mappings f : R → R find a formula for its inverse: (a) f (x) = 3x 7, (b) f (x) = x3 + 2.
5.48. For any mapping f : A → B, show that 1B ° f = f = f 1A.
Linear Mappings
5.49. Show that the following mappings are linear:
(a) F : R3 → R2 defined by F(x; y; z) = (x + 2y – 3z; 4x – 5y + 6z).
(b) F : R2 → R2 defined by F(x; y) = (ax + by; cx + dy), where a, b, c, d belong to R.
5.50. Show that the following mappings are not linear:
(a) F : R2 → R2 defined by F(x; y) = (x2; y2).
(b) F : R3 → R2 defined by F(x; y; z) = (x + 1; y + z).
(c) F : R2 → R2 defined by F(x; y) = (xy; y).
(d) F : R3 → R2 defined by F(x; y; z) = (|x|; y + z).
5.51. Find F(a; b), where the linear map F : R2 → R2 is defined by F(1; 2) = (3; -1) and F(0; 1) = (2; 1).
5.52. Find a 2 × 2 matrix A that maps
(a) (1; 3)T and (1; 4)T into (-2; 5)T and (3; –1)T, respectively.
(b) (2; -4)T and (-1; 2)T into (1; 1)T and (1; 3)T, respectively.
5.53. Find a 2 × 2 singular matrix B that maps (1; 1)T into (1; 3)T.
5.54. Let V be the vector space of real n-square matrices, and let M be a fixed nonzero matrix in V. Show that the first two of the following mappings T : V → V are linear, but the third is not:
(a) T(A) = MA, (b) T(A) = AM + MA, (c) T(A) = M + A.
5.55. Give an example of a nonlinear map F : R2 → R2 such that F-1 (0) = {0} but F is not one-to-one.
5.56. Let F : R2 → R2 be defined by F(x; y) = (3x + 5y; 2x + 3y), and let S be the unit circle in R2.(S consists of all points satisfying x2 + y2 = 1.) Find (a) the image F(S), (b) the preimage F-1 (S).
5.57. Consider the linear map G : R3 → R3 defined by G(x; y; z) = (x + y + z; y – 2z; y – 3z) and the unit sphere S2 in R3, which consists of the points satisfying x2 + y2 + z2 = 1. Find (a) G(S2), (b) G-1 (S2).
5.58. Let H be the plane x + 2y 3z = 4 in R3 and let G be the linear map in Problem 5.57. Find (a) G(H), (b) G-1(H).
5.59. Let W be a subspace of V. The inclusion map, denoted by i : W ,! V, is defined by i(w) = w for every w ∈ W. Show that the inclusion map is linear.
5.60. Suppose F : V → U is linear. Show that F(-υ) = -F(υ).
Kernel and Image of Linear Mappings
5.61. For each linear map F find a basis and the dimension of the kernel and the image of F:
(a) F : R3 → R3 defined by F(x; y; z) = (x + 2y – 3z; 2x + 5y – 4z; x + 4y + z),
(b) F : R4 → R3 defined by F(x; y; z; t) = (x + 2y + 3z + 2t; 2x + 4y + 7z + 5t; x + 2y + 6z + 5t).
5.62. For each linear map G, find a basis and the dimension of the kernel and the image of G:
(a) G : R3 → R2 defined by G(x; y; z) = (x + y + z; 2x + 2y + 2z),
(b) G : R3 → R2 defined by G(x; y; z) = (x + y; y + z),
(c) G : R5 → R3 defined by

5.63. Each of the following matrices determines a linear map from R4 into R3:

Find a basis as well as the dimension of the kernel and the image of each linear map.
5.64. Find a linear mapping F : R3 → R3 whose image is spanned by (1, 2, 3) and (4, 5, 6).
5.65. Find a linear mapping G : R4 → R3 whose kernel is spanned by (1, 2, 3, 4) and (0, 1, 1, 1).
5.66. Let V = P10(t), the vector space of polynomials of degree ≤ 10. Consider the linear map D4 denotes the fourth derivative d4(f)=dt4. Find a basis and the dimension of (a) the image of D4; (b) the kernel of D4.
5.67. Suppose F : V → U is linear. Show that (a) the image of any subspace of V is a subspace of U; (b) the preimage of any subspace of U is a subspace of V.
5.68. Show that if F : V → U is onto, then dim U ≤ dim V. Determine all linear maps F : R3 → R4 that are onto.
5.69. Consider the zero mapping 0 : V → U defined by 0(υ) = 0; ∀ υ ∈ V. Find the kernel and the image of 0.
Operations with linear Mappings
5.70. Let F : R3 → R2 and G : R3 → R2 be defined by F(x; y; z) = (y; x + z) and G(x; y; z) = (2z; x – y). Find formulas defining the mappings F + G and 3F – 2G.
5.71. Let H : R2 → R2 be defined by H(x; y) = (y; 2x). Using the maps F and G in Problem 5.70, find formulas defining the mappings: (a) H ° F and H ° G, (b) F ° H and G ° H, (c) H ° (F + G) and H ° F + H ° G.
5.72. Show that the following mappings F, G, H are linearly independent:
(a) F; G; H 2 Hom(R2; R2) defined by F(x; y) = (x; 2y), G(x; y) = (y; x + y), H(x; y) = (0; x),
(b) F; G; H 2 Hom(R3; R) defined by F(x; y; z) = x + y + z, G(x; y; z) = y + z, H(x; y; z) = x – z.
5.73. For F; G ∈ Hom(V; U), show that rank(F + G) ≤ rank(F)+ rank(G). (Here V has finite dimension.)
5.74. Let F : V → U and G : U → V be linear. Show that if F and G are nonsingular, then G ° F is nonsingular. Give an example where G ° F is nonsingular but G is not. [Hint: Let dim V < dim U.]
5.75. Find the dimension d of (a) Hom(R2; R8), (b) Hom(P4(t); R3), (c) Hom(M2;4; P2(t)).
5.76. Determine whether or not each of the following linear maps is nonsingular. If not, find a nonzero vector v whose image is 0; otherwise find a formula for the inverse map:
(a) F : R3 → R3 defined by F(x; y; z) = (x + y + z; 2x + 3y + 5z; x + 3y + 7z),
(b) G : R3 → P2(t) defined by G(x; y; z) = (x + y)t2 +(x + 2y + 2z)t + y + z,
(c) H : R2 → P2(t) defined by H(x; y) = (x + 2y)t2 +(x y)t + x + y.
5.77. When can dim [Hom(V; U) = dim V?
Algebra of Linear Operators
5.78. Let F and G be the linear operators on R2 defined by F(x; y) = (x + y; 0) and G(x; y) = (y; x). Find formulas defining the linear operators: (a) F + G, (b) 5F – 3G, (c) FG, (d) GF, (e) F2, (f) G2.
5.79. Show that each linear operator T on R2 is nonsingular and find a formula for T-1, where
(a) T(x; y) = (x + 2y; 2x + 3y), (b) T(x; y) = (2x 3y; 3x 4y).
5.80. Show that each of the following linear operators T on R3 is nonsingular and find a formula for T-1, where
(a) T(x; y; z) = (x 3y 2z; y – 4z; z); (b) T(x; y; z) = (x + z; x – y; y).
5.81. Find the dimension of A(V), where (a) V = R7, (b) V = P5(t), (c) V = M3;4.
5.82. Which of the following integers can be the dimension of an algebra A(V) of linear maps: 5, 9, 12, 25, 28, 36, 45, 64, 88, 100?
5.83. Let T be the linear operator on R2 defined by T(x; y) = (x + 2y; 3x + 4y). Find a formula for f (T), where
(a) f (t) = t2 + 2t 3, (b) f (t) = t2 – 5t – 2.
Miscellaneous Problems
5.84. Suppose F : V → U is linear and k is a nonzero scalar. Prove that the maps F and kF have the same kernel and the same image.
5.85. Suppose F and G are linear operators on V and that F is nonsingular. Assume that V has finite dimension. Show that rank(FG) = rank(GF) = rank(G).
5.86. Suppose V has finite dimension. Suppose T is a linear operator on V such that rank(T2) = rank(T). Show that Ker T ∩ Im T = {0}.
5.87. Suppose V = U ⊕ W. Let E1 and E2 be the linear operators on V defined by E1(υ) = u, E2(υ) = w, where υ = u + w, u ∈ U, w ∈ W. Show that (a) E21 = E1 and E22 = E2 (i.e., that E1 and E2 are projections); (b) E1 + E2 = I, the identity mapping; (c) E1E2 = 0 and E2E1 = 0.
5.88. Let E1 and E2 be linear operators on V satisfying parts (a), (b), (c) of Problem 5.88. Prove

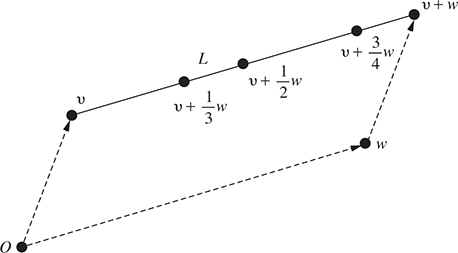
5.89. Let v and w be elements of a real vector space V. The line segment L from v to v + w is defined to be the set of vectors v + tw for 0 ≤ t ≤ 1. (See Fig. 5.6.)
(a) Show that the line segment L between vectors v and u consists of the points:

(b) Let F : V → U be linear. Show that the image F(L) of a line segment L in V is a line segment in U.
5.90. Let F : V → U be linear and let W be a subspace of V. The restriction of F to W is the map F|W : W → U defined by F|W(υ) = F(υ) for every υ in W. Prove the following:
(a) F|W is linear; (b) Ker(F|W) = (Ker F) ∩ W; (c) Im(F|W) = F(W).
5.91. A subset X of a vector space V is said to be convex if the line segment L between any two points (vectors) P; Q ∈ X is contained in X. (a) Show that the intersection of convex sets is convex; (b) suppose F : V → U is linear and X is convex. Show that F(X) is convex.
ANSWERS TO SUPPLEMENTARY PROBLEMS
5.46. (a) (f ° g)(x) = 4x2 + 1, (b) (g ° f)(x) = 2x2 + 6x – 1, (c) (g ° g)(x) = 4x – 9,
(d) (f ° f)(x) = x4 + 6x3 + 14x2 + 15x + 5

5.49. F(x; y; z) = A(x; y; z)T, where (a) 
5.50. (a) u = (2; 2), k = 3; then F(ku) = (36; 36) but kF(u) = (12; 12); (b) F(0) ≠ 0;
(c) u = (1; 2), υ = (3; 4); then F(u + υ) = (24; 6) but F(u)+ F(υ) = (14; 6);
(d) u = (1; 2; 3), k = 2; then F(ku) = (2; 10) but kF(u) = (2; 10).
5.51. F(-a; b) = (a + 2b; -3a + b)
5.52.  ; (b) None. (2; 4) and (1; 2) are linearly dependent but not (1, 1) and (1, 3).
; (b) None. (2; 4) and (1; 2) are linearly dependent but not (1, 1) and (1, 3).
5.53.  [Hint: Send (0; 1)T into (0; 0)T.]
[Hint: Send (0; 1)T into (0; 0)T.]
5.56. (a) 13x2 – 42xy + 34y2 = 1, (b) 13x2 + 42xy + 34y2 = 1
5.57. (a) x2 – 8xy + 26y2 + 6xz – 38yz + 14z2 = 1, (b) x2 + 2xy + 3y2 + 2xz – 8yz + 14z2 = 1
5.58. (a) x – y + 2z = 4, (b) x + 6z = 4
5.61. (a) dim(Ker F) = 1, {(7; 2; 1)}; dim(Im F) = 2, {(1; 2; 1); (0; 1; 2)};
(b) dim(Ker F) = 2, {(2; 1; 0; 0); (1; 0; 1; 1)}; dim(Im F) = 2, {(1; 2; 1); (0; 1; 3)}
5.62. (a) dim(Ker G) = 2, {(1; 0; 1); (1; 1; 0)}; dim(Im G) = 1, {(1; 2)};
(b) dim(Ker G) = 1, {(1; 1; 1)}; Im G = R2, {(1; 0); (0; 1)};
(c) dim(Ker G) = 3, {(2; 1; 0; 0; 0); (1; 0; 1; 1; 0); (5; 0; 2; 0; 1)}; dim(Im G) = 2, {(1; 1; 3); (0; 1; 2)}
5.63. (a) dim(Ker A) = 2, {(4; 2; 5; 0); (1; 3; 0; 5)}; dim(Im A) = 2, {(1; 2; 1); (0; 1; 1)};
(b) dim(Ker B) = 1, {(1; 23, 1; 1)}; Im B = R3
5.64. F(x; y; z) = (x + 4y; 2x + 5y; 3x + 6y)
5.65. F(x; y; z; t) = (x + y – z; 2x + y – t; 0)
5.66. (a) {1; t; t2; …, t6}, (b) {1; t; t2; t3}
5.68. None, because dim R4 > dim R3:
5.70. (F + G)(x; y; z) = (y + 2z; 2x y + z), (3F – 2G)(x; y; z) = (3y – 4z; x + 2y + 3z)
5.71. (a) (H ° F)(x; y; z) = (x + z; 2y), (H ° G)(x; y; z) = (x y; 4z);
(b) not defined; (c) (H ° (F + G))(x; y; z) = (H ° F + H ° G)(x; y; z) = (2x – y + z; 2y + 4z)
5.74. F(x; y) = (x; y; y); G(x; y; z) = (x; y)
5.76. (a) υ = (2; 3; 1); (b) G-1 (at2 + bt + c) = (b – 2c; a – b + 2c; a + b – c);
(c) H is nonsingular, but not invertible, because dim P2(t) > dim R2.
5.77. dim U = 1; that is, U = K.
5.78. (a) (F + G)(x; y) = (x; x); (b) (5F 3G)(x; y) = (5x + 8y; 3x); (c) (FG)(x; y) = (x y; 0);
(d) (GF)(x; y) = (0; x + y); (e) F2(x; y) = (x + y; 0) (note that F2 = F); (f) G2(x; y) = (x; – y).
[Note that G2 + I = 0; hence, G is a zero of f (t) = t2 + 1.]
5.79. (a) T-1 (x; y) = (3x + 2y; 2x y), (b) T-1 (x; y) = (4x + 3y; 3x + 2y)
5.80. (a) T-1 (x; y; z) = (x + 3y + 14z; y – 4z; z), (b) T-1 (x; y; z) = (y + z; y; x y – z)
5.82. Squares: 9, 25, 36, 64, 100
5.83. (a) T(x; y) = (6x + 14y; 21x + 27y); (b) T(x; y) = (0; 0)—that is, f (T) = 0