Die Lorentz-Invarianz der physikalischen Gesetze führt zu einer Vielzahl von Phänomenen, die in der nichtrelativistischen, durch die Galilei-Transformation bestimmten Physik nicht auftreten. Praktisch alle diese Konsequenzen der SRT widersprechen unserem Alltagsverständnis, weil sie erst bei hohen Geschwindigkeiten große Effekte aufweisen.
4.1 Verlust der Gleichzeitigkeit
Wir haben alle ein elementares Verständnis, was es bedeutet, wenn zwei Ereignisse „gleichzeitig“ stattfinden. Praktisch jeder von uns besitzt heute mindestens eine sehr genau gehende Uhr und wir müssen nur die jeweiligen Uhrzeiten vergleichen, die z. B. zwei Beobachter an unterschiedlichen Orten bei bestimmten Ereignissen gemessen haben, und können dann entscheiden, ob diese beiden Ereignisse, innerhalb der Messgenauigkeit, gleichzeitig stattgefunden haben.
Woher wissen wir aber, dass beide Uhren wirklich synchron gehen? Bei den Genauigkeiten, die im Alltag wichtig sind, ist diese Frage nebensächlich, wir können die beiden Uhren einfach zusammenbringen und vergleichen. Auf einer fundamentaleren Ebene ist diese Frage aber überhaupt nicht trivial, denn um die beiden Uhren zusammenzuführen, muss mindestens eine aus ihrem Ruhsystem herausbewegt werden, dabei transformieren sich ihre Koordinaten entsprechend der Lorentz-Transformation. Weil dabei die Zeit mittransformiert wird, zerstört dieser Vorgang tatsächlich die Synchronität.

Schema zur Uhrensynchronisation. Zwei Uhren im Abstand d werden genau dann auf t = 0 gestellt, wenn der Lichtstrahl, der in der Mitte gleichzeitig zu beiden Uhren ausgesendet wurde, sie erreicht
 “) und E2 („Uhr 2 zeigt
“) und E2 („Uhr 2 zeigt  “) gleichzeitig an verschiedenen Orten stattfinden. Es gilt also
“) gleichzeitig an verschiedenen Orten stattfinden. Es gilt also


 und
und  , dass t2 ≠ t1 ist. Im System S finden die beiden Ereignisse also nicht gleichzeitig statt (s. Abb. 4.2).
, dass t2 ≠ t1 ist. Im System S finden die beiden Ereignisse also nicht gleichzeitig statt (s. Abb. 4.2).
Das System Sʹ bewege sich mit der Geschwindigkeit β = 0,5 relativ zu S. Zwei Ereignisse E1 und E2, die im System Sʹ zur gleichen Zeit, aber an unterschiedlichen Orten stattfinden, finden im System S nicht gleichzeitig statt. Die grauen, gestrichelten Linien geben Orte gleicher Zeit in Sʹ an, wohingegen die schwarzen, gepunkteten Linien Orte gleicher Zeit in S bestimmen
Wenn die Gleichzeitigkeit von Ereignissen vom Inertialsystem abhängt, so kann auch die zeitliche Abfolge von Ereignissen in unterschiedlichen Systemen verschieden sein. Auf den ersten Blick erscheint das unphysikalisch, denn eine willkürliche zeitliche Abfolge von Ereignissen scheint das Kausalitätsprinzip von Ursache und Wirkung zu verletzen. Die Lösung für dieses Problem liegt darin, dass die hier betrachteten Punkte jeweils raumartige Intervalle bilden. Zwei in einem Inertialsystem zur gleichen Zeit an verschiedenen Orten stattfindende Ereignisse sind nicht kausal verbunden. Die Abfolge zeitartiger, d. h. möglicherweise kausal verknüpfter, Ereignisse dagegen ist in jedem Inertialsystem gleich, auch wenn hier verschiedene Zeitdifferenzen möglich sind.
4.2 Lorentz-Kontraktion bewegter Maßstäbe
 ruhe in Sʹ. Seine beiden Endpunkte werden durch die Weltlinien
ruhe in Sʹ. Seine beiden Endpunkte werden durch die Weltlinien  und
und  beschrieben (s. Abb. 4.3). Betrachten wir den Stab zur Zeit ctʹ = 0, so stellen wir fest, dass die beiden Ereignisse an den Endpunkten des Stabes, die wir zur Längenmessung verwenden, bezogen auf S nicht gleichzeitig stattfinden. Nun bedeutet aber eine Längenmessung, dass wir die Orte der Endpunkte zur gleichen Zeit bestimmen müssen, um aus deren Differenz die Länge ermitteln zu können. Für die Längenmessung in S heißt das, dass wir zwei Beobachter OA und OB finden müssen, die sich zur Zeit ct0 an den jeweiligen Endpunkten des Stabes befinden. Aus deren räumlichen Abstand erhalten wir dann die gemessene Länge l = |xB − xA| in S.
beschrieben (s. Abb. 4.3). Betrachten wir den Stab zur Zeit ctʹ = 0, so stellen wir fest, dass die beiden Ereignisse an den Endpunkten des Stabes, die wir zur Längenmessung verwenden, bezogen auf S nicht gleichzeitig stattfinden. Nun bedeutet aber eine Längenmessung, dass wir die Orte der Endpunkte zur gleichen Zeit bestimmen müssen, um aus deren Differenz die Länge ermitteln zu können. Für die Längenmessung in S heißt das, dass wir zwei Beobachter OA und OB finden müssen, die sich zur Zeit ct0 an den jeweiligen Endpunkten des Stabes befinden. Aus deren räumlichen Abstand erhalten wir dann die gemessene Länge l = |xB − xA| in S.
Längenkontraktion eines in Sʹ ruhenden Stabes der Länge lʹ. Die in S ruhenden Beobachter OA und OB messen zur Zeit ct0 die Länge l. Sʹ bewegt sich gegenüber S mit β = 0,5
 und
und  der beiden Endpunkte, die wir jeweils mit Hilfe der Koordinatenzeit
der beiden Endpunkte, die wir jeweils mit Hilfe der Koordinatenzeit  beziehungsweise
beziehungsweise  parametrisieren,
parametrisieren,

 und
und  ermitteln und in die Gleichungen für die Orte xA und xB einsetzen. Deren Differenz führt uns auf
ermitteln und in die Gleichungen für die Orte xA und xB einsetzen. Deren Differenz führt uns auf
Wir betrachten später noch genauer, was die Lorentz-Kontraktion für die Beobachtung schnell bewegter Körper bedeutet. Dabei wird durch unterschiedliche Lichtlaufzeit von verschiedenen Punkten eines Objektes die Lorentz-Kontraktion nicht direkt beobachtbar.
4.3 Bewegte Uhren: Zeitdilatation
Der Verlust der Gleichzeitigkeit, den wir in Abschn. 4.1 besprochen haben, widerspricht unserer alltäglichen Erfahrung vom Ablauf der Zeit. Noch unverständlicher wird es, wenn wir Zeitdifferenzen von unterschiedlichen Bezugssystemen aus untersuchen.

Die Uhr, die im Koordinatenursprung des Systems S′ ruht, zeigt eine Zeitdifferenz cΔt′ an. Im System S entspricht das einer Zeitdifferenz cΔt
 in eine Zeitdifferenz bezogen auf S umrechnen,
in eine Zeitdifferenz bezogen auf S umrechnen,
Ohne weitere Anmerkungen würden wir mit dem bisher Gesagten in ein Paradoxon laufen, denn wir könnten die Situation auch so betrachten, dass Sʹ ruht und S sich bewegt, was aufgrund des Relativitätsprinzips vollkommen legitim wäre. Dann würde aber die Zeitdifferenz im System S kürzer dauern als in Sʹ und wir hätten einen Widerspruch. Der entscheidende Punkt ist, dass wir die Zeitdifferenz in S nicht vom Ort der Uhr im Ursprung beurteilen können. Tatsächlich brauchen wir, wie im Beispiel der Lorentz-Kontraktion, mindestens zwei synchronisierte, ruhende Uhren in S, die an den Orten  und
und  die jeweilige Zeit
die jeweilige Zeit  und
und  der bewegten Uhr ablesen.
der bewegten Uhr ablesen.
Der Effekt der Zeitdilatation kann sehr gut bei kurzlebigen Elementarteilchen nachgewiesen werden. Beim Auftreffen der kosmischen Strahlung auf die Atmosphäre entstehen z. B. sich mit sehr hoher Geschwindigkeit bewegende Myonen. Diese haben eine mittlere Lebensdauer Δt ≈ 2 · 10−6 s.



Skizze zum Experiment von Rossi und Hall [5]. Beim Auftreffen der kosmischen Strahlung auf die Atmosphäre entstehen kurzlebige Myonen (μ−) mit einer Lebensdauer von etwa 2 · 10−6 s. Je nach Meereshöhe eines Beobachtungspunktes erreichen unterschiedlich viele dieser Teilchen den Erdboden
Ein sehr schöner Versuch mit echten Uhren wurde 1972 von Hafele und Keating [3, 4] durchgeführt. Sie schickten Atomuhren in Linienflügen um die Welt einmal in Ost- und einmal in Westrichtung. Bei diesem Versuch treten auch allgemein-relativistische Effekte aufgrund der Erdgravitation auf (s. Abschn. 13.4.6).
4.4 Paradoxa der SRT
Die Eigenschaften der Lorentz-Invarianz führen sehr leicht zu scheinbaren Widersprüchen. Widersprüchliche Vorhersagen würden die SRT aber „ad absurdum“ führen, d. h. als physikalische Theorie unbrauchbar machen.
Die SRT ist vermutlich diejenige Theorie, in der die größte Anzahl solcher Paradoxa diskutiert wird. In diesem Abschnitt besprechen wir einige solcher scheinbaren Widersprüche. Mit den gerade diskutierten Problemstellungen sind wir aber gut gerüstet, diese aufzulösen.
4.4.1 Das Stab-Rahmen-Paradoxon
Wir betrachten einen bewegten Stab der Länge l und einen ruhenden Rahmen mit derselben Länge l. Wegen der Längenkontraktion hat der Stab im Ruhsystem des Rahmens die Länge l∕γ und passt daher bequem in den Rahmen. Wir sehen jedoch sofort einen scheinbaren Widerspruch:
„Im Ruhsystem des Rahmens erfährt der Stab eine Längenkontraktion und passt in den Rahmen. Im Ruhsystem des Stabes dagegen erfährt der Rahmen eine Längenkontraktion. Der Stab passt nicht in den Rahmen.“
Um dieses Paradoxon aufzulösen müssen wir präzise darlegen, was die Sprechweise „passt in den Rahmen“ bedeutet. Wir verstehen darunter, dass sich Anfangs- und Endpunkt gleichzeitig innerhalb des Rahmens befinden. Wie wir gesehen haben ist aber Gleichzeitigkeit eine inertialsystemabhängige Eigenschaft. Darin liegt der Schlüssel zur Auflösung unseres Problems.


 und
und  . Für die Endpunkte des Stabes erhalten wir analog die Weltlinien
. Für die Endpunkte des Stabes erhalten wir analog die Weltlinien

 und
und  .
. und
und  der Randpunkte.
der Randpunkte.  und
und  beschreiben die Weltlinien der beiden Stabenden. Die Länge
beschreiben die Weltlinien der beiden Stabenden. Die Länge  des Stabes gemessen in Sʹ ist gleich dem Abstand Δr = |rr − rl| zwischen den Rändern des Rahmens gemessen in S; wir setzen daher Δr = Δsʹ =: ℓ. Wie wir aus Abschn. 4.2 wissen, bedeutet messen, dass wir die Endpunkte des Stabes zur gleichen Zeit feststellen müssen. Dies hat zur Folge, dass im Ruhsystem des Rahmens der Stab eine gemessene Länge Δs = Δsʹ∕γ = ℓ∕γ besitzt und daher bequem in den Rahmen hineinpasst.
des Stabes gemessen in Sʹ ist gleich dem Abstand Δr = |rr − rl| zwischen den Rändern des Rahmens gemessen in S; wir setzen daher Δr = Δsʹ =: ℓ. Wie wir aus Abschn. 4.2 wissen, bedeutet messen, dass wir die Endpunkte des Stabes zur gleichen Zeit feststellen müssen. Dies hat zur Folge, dass im Ruhsystem des Rahmens der Stab eine gemessene Länge Δs = Δsʹ∕γ = ℓ∕γ besitzt und daher bequem in den Rahmen hineinpasst.
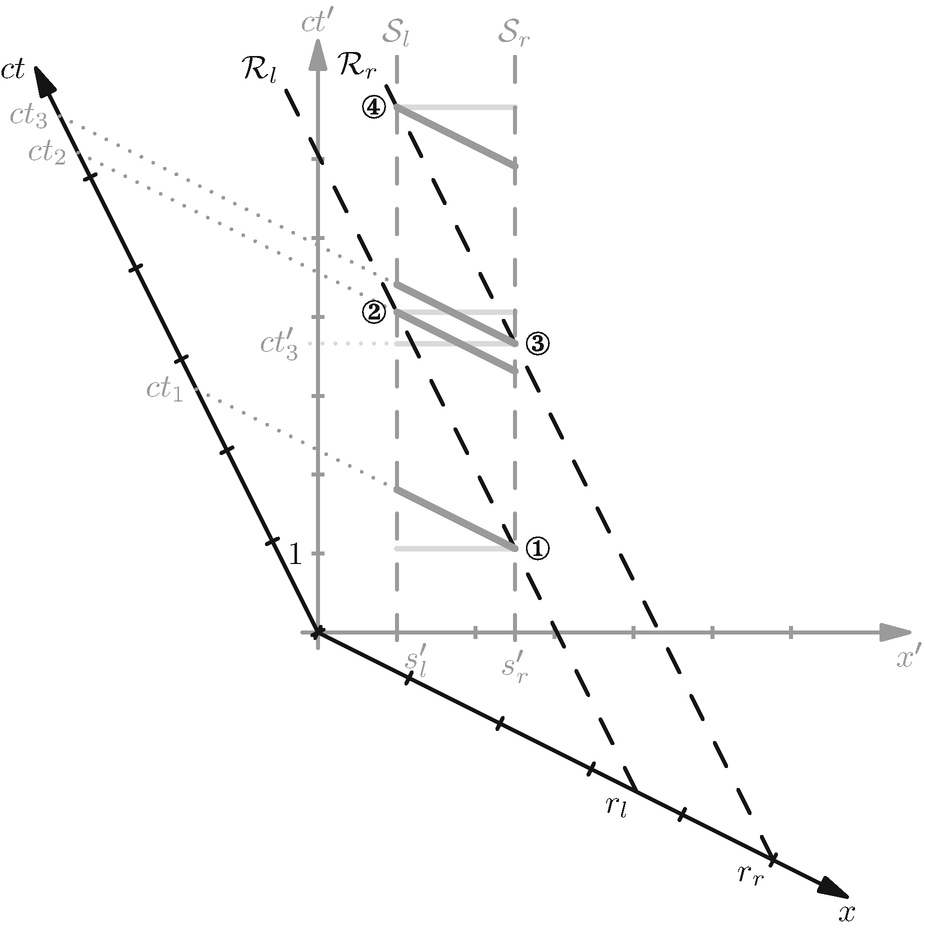
Stab-Rahmen-Paradoxon aus Sicht des Ruhsystems S des Rahmens. Die Weltlinien  und
und  kennzeichnen die Randpunkte des Rahmens, wohingegen die Weltlinien
kennzeichnen die Randpunkte des Rahmens, wohingegen die Weltlinien  und
und  die Endpunkte des Stabes angeben
die Endpunkte des Stabes angeben


Stab-Rahmen-Paradoxon aus Sicht des Ruhsystems S′ des Stabes


Das scheinbare Paradoxon zeigt sich nun darin, dass der Stab länger ist als der gemessene Abstand zwischen den Rändern des Rahmens, zum Beispiel zur Zeit  und daher nicht hineinpasst. Um dieses Paradoxon zu lösen, verabschieden wir uns zunächst von der Vorstellung eines starren Stabes und eines soliden Rahmens und betrachten die jeweiligen Endpunkte und Randpunkte als Punktereignisse. Dies ist schon allein deshalb notwendig, da wir nur eine räumlich eindimensionale Bewegung betrachten und daher ein solider Rahmen schon bei der ersten Berührung unseren Stab aufhalten würde.
und daher nicht hineinpasst. Um dieses Paradoxon zu lösen, verabschieden wir uns zunächst von der Vorstellung eines starren Stabes und eines soliden Rahmens und betrachten die jeweiligen Endpunkte und Randpunkte als Punktereignisse. Dies ist schon allein deshalb notwendig, da wir nur eine räumlich eindimensionale Bewegung betrachten und daher ein solider Rahmen schon bei der ersten Berührung unseren Stab aufhalten würde.
Die anfängliche Problematik des Paradoxons, ob der Stab nun durch den Rahmen „passt“ oder nicht, können wir wie folgt auflösen. Aus Sicht des Rahmensystems S „passt“ der Stab räumlich durch den Rahmen, da die Stabenden innerhalb der Ereignisse ② und ③ den Rahmen passieren. Aus Sicht des Stabsystems Sʹ „passt“ der Stab zeitlich durch den Rahmen, da wiederum seine Stabenden innerhalb der Ereignisse ② und ③ den Rahmen passieren.
4.4.2 Das Uhrenparadoxon
Betrachten wir zwei baugleiche Uhren. Die erste Uhr befinde sich im System S und die zweite im System Sʹ. Beide Uhren seien in ihrem jeweiligen Bezugssystem in Ruhe. Das System Sʹ bewege sich mit der Geschwindigkeit β entlang der positiven x-Achse des Systems S. Die gängige Aussage lautet nun, dass die zweite Uhr aufgrund der Zeitdilatation langsamer läuft, da sie sich, im Gegensatz zur ersten Uhr, bewegt. Der scheinbare Widerspruch ergibt sich hier, wenn wir die Situation im Ruhsystem der zweiten Uhr betrachten. Dort bewegt sich die erste Uhr und erfährt eine Zeitdilatation. Welche Uhr geht nun langsamer, die erste oder die zweite?
Zuerst müssen wir uns klar machen, dass wir nicht allein mit der ersten Uhr feststellen können, dass die zweite langsamer geht. Wir können nur zu dem Zeitpunkt, an dem sich die zweite Uhr am Ort der ersten befindet, ihre Uhrzeit ablesen. Um ein Zeitintervall messen zu können, müssen wir noch mit einer anderen Uhr vergleichen, die sich im System S an einem anderen Ort befindet. Wir führen also noch eine weitere Uhr im System S ein. Um die Situation in beiden Systemen gleichwertig diskutieren zu können, soll es auch noch eine weitere Uhr im System Sʹ geben. In beiden Systemen sollen die jeweils dort ruhenden Uhren synchronisiert sein und den gleichen Abstand voneinander haben. Unter diesen Voraussetzungen können wir die Ergebnisse des letzten Abschnittes verwenden, wobei  Wir denken uns dazu an beiden Enden von Rahmen und Stab jeweils eine Uhr befestigt.
Wir denken uns dazu an beiden Enden von Rahmen und Stab jeweils eine Uhr befestigt.
 und
und  der Uhren, die in Sʹ in Ruhe sind, sich aber relativ zu S in positiver x-Richtung bewegen. Um die verstrichene Zeit für die bewegte Uhr auf der Weltlinie
der Uhren, die in Sʹ in Ruhe sind, sich aber relativ zu S in positiver x-Richtung bewegen. Um die verstrichene Zeit für die bewegte Uhr auf der Weltlinie  zu ermitteln, bestimmen wir die Zeitdifferenz zwischen den Ereignissen ① und ③ einmal aus Sicht der bewegten Uhr und einmal aus dem Vergleich der ruhenden Uhren an den Orten x = rl und x = rr. Da die Ereignisse hier mit denen aus dem vorherigen Abschnitt übereinstimmen, können wir unmittelbar die Zeiten aus den Beziehungen (4.14) und (4.15) verwenden. So folgt für die Zeitdifferenzen
zu ermitteln, bestimmen wir die Zeitdifferenz zwischen den Ereignissen ① und ③ einmal aus Sicht der bewegten Uhr und einmal aus dem Vergleich der ruhenden Uhren an den Orten x = rl und x = rr. Da die Ereignisse hier mit denen aus dem vorherigen Abschnitt übereinstimmen, können wir unmittelbar die Zeiten aus den Beziehungen (4.14) und (4.15) verwenden. So folgt für die Zeitdifferenzen
 und folglich vergeht die Zeit in Sʹ langsamer als in S. Das gleiche Ergebnis erhalten wir auch für die Uhr auf der Weltlinie
und folglich vergeht die Zeit in Sʹ langsamer als in S. Das gleiche Ergebnis erhalten wir auch für die Uhr auf der Weltlinie  .
.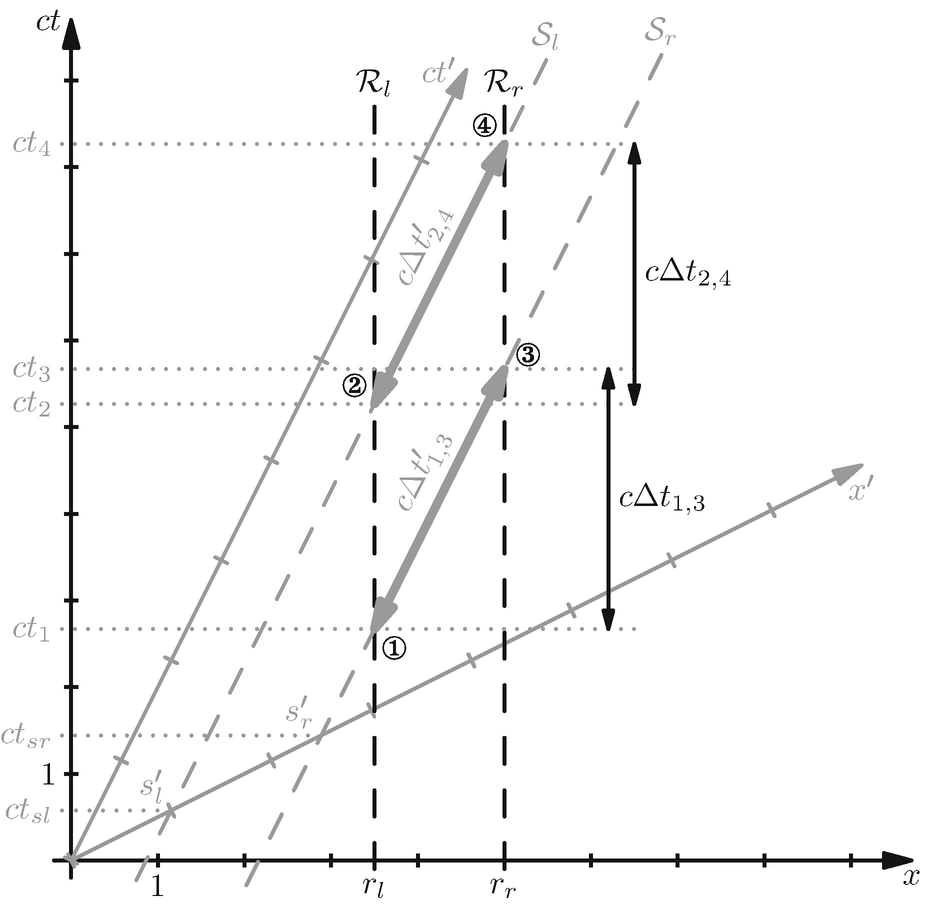
Uhrenparadoxon aus Sicht des Ruhsystems S. Die ruhenden Uhren in S folgen den Weltlinien  und
und  . Die sich zu S relativ bewegenden Uhren sind durch die Weltlinien
. Die sich zu S relativ bewegenden Uhren sind durch die Weltlinien  und
und  gekennzeichnet
gekennzeichnet
 mit Hilfe der Ereignisse ① und ② berechnen. Aus den Beziehungen (4.14) und (4.15) folgt,
mit Hilfe der Ereignisse ① und ② berechnen. Aus den Beziehungen (4.14) und (4.15) folgt,
 ist, vergeht die Zeit im System S langsamer als im System Sʹ. Das scheint aber im direkten Widerspruch zur vorherigen Aussage zu sein, dass die Zeit in Sʹ langsamer als in S vergeht.
ist, vergeht die Zeit im System S langsamer als im System Sʹ. Das scheint aber im direkten Widerspruch zur vorherigen Aussage zu sein, dass die Zeit in Sʹ langsamer als in S vergeht.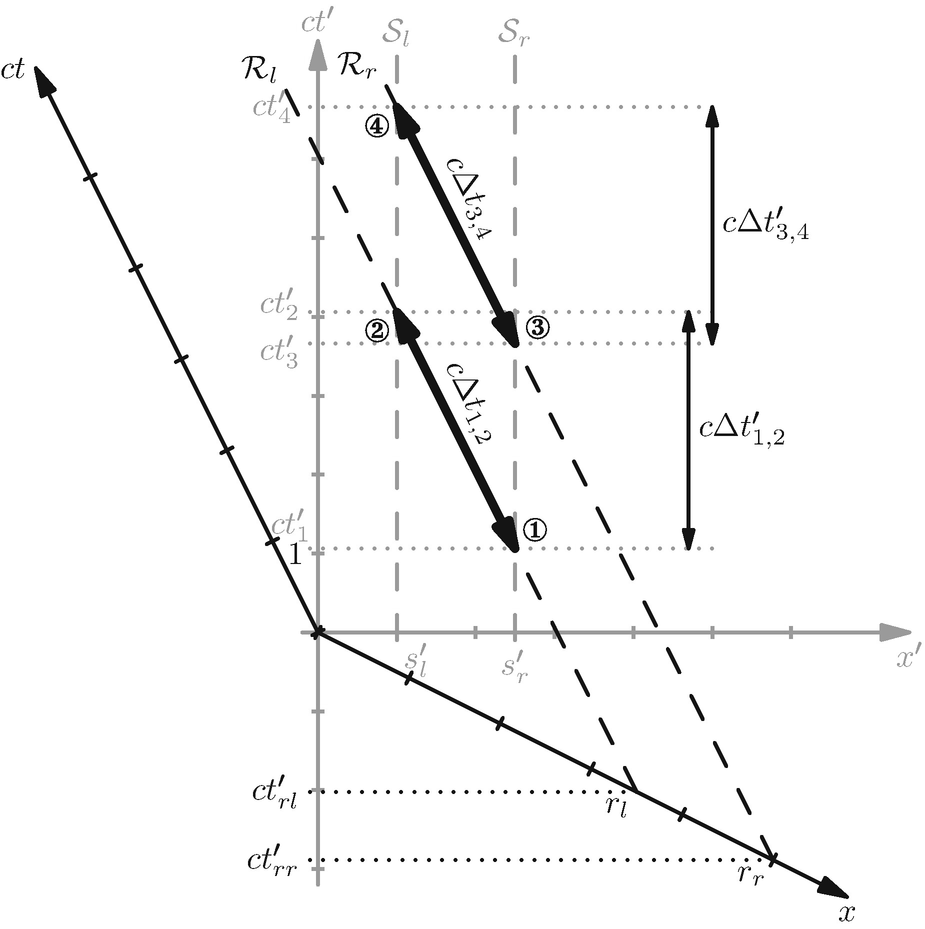
Uhrenparadoxon aus Sicht des Ruhsystems S′. Hier bewegen sich die beiden Uhren des Systems S entlang der Weltlinien  und
und 

 ist (s. a. Abb. 4.9). Aus Sicht des Systems Sʹ laufen die beiden Uhren nicht synchron.
ist (s. a. Abb. 4.9). Aus Sicht des Systems Sʹ laufen die beiden Uhren nicht synchron. und
und  befinden, auf
befinden, auf  synchronisiert. Bezogen auf das System S sind die Uhrzeiten zum Zeitpunkt der Synchronisierung jedoch unterschiedlich,
synchronisiert. Bezogen auf das System S sind die Uhrzeiten zum Zeitpunkt der Synchronisierung jedoch unterschiedlich,
 folgt daraus, dass ctsr > ctsl > 0 ist (s. a. Abb. 4.8).
folgt daraus, dass ctsr > ctsl > 0 ist (s. a. Abb. 4.8).Das Uhrenparadoxon gründet sich alleine darauf, dass sich die beiden Systeme S und Sʹ nicht über eine gemeinsame Zeitsynchronisierung einigen können. Welche Uhr langsamer geht, hängt also davon ab, mit welchem Bezugssystem wir Zeitdifferenzen bestimmen.
4.4.3 Das Zwillingsparadoxon
Dies ist wahrscheinlich das bekannteste Paradoxon der SRT. Betrachtet wird ein Zwillingspaar. Einer der Zwillinge bleibt auf der Erde, der andere reist mit hoher Geschwindigkeit und kehrt zur Erde zurück. Auf der Erde ist aufgrund der Zeitdilatation mehr Zeit vergangen als im Raumschiff. Das Paradoxon bei dieser Situation ergibt sich, wenn man sie aus der Sicht des anderen Zwillings betrachtet. Von dort aus betrachtet bewegt sich der Zwilling auf der Erde mit hoher Geschwindigkeit, es sollte also zu einer Zeitdilatation auf der Erde kommen.
Tatsächlich sind das Ruhsystems des Zwillings auf der Erde und das System des reisenden Zwillings in diesem Fall aber nicht gleichberechtigt. Der reisende Zwilling ist nicht während der gesamten Reise im gleichen Inertialsystem, da er, um zurückzukehren, beschleunigen muss. Aufgrund der dabei wirkenden Kraft ist es eindeutig, welcher der beiden Zwillinge sich bewegt und welcher während der gesamten Zeit ruht. Wir betrachten das Zwillingsparadoxon nochmals quantitativ am Ende von Kap. 6 im Rahmen der relativistischen Mechanik.
4.5 Übungsaufgaben
4.5.1 Das „Myonenparadoxon“
Wenn wir nochmal zu den Myonen zurückkommen, können wir ein scheinbares Problem bemerken. Im Ruhsystem der Myonen haben diese die Lebensdauer τ ≈ 2 · 10−6 s, denn dort geht ihre Uhr ja nicht langsamer. Warum können sie dann trotzdem die Erde erreichen?