Appendix A. Programs from the Book
This appendix contains the source code for the programs in the book. You can also find the source code online at the author’s website, as well as built into techBASIC and techBASIC Sampler. Look in the Maker Books folder in the techBASIC Programs directory.
Juno Simulation
This text-based BASIC program appears in Chapter 14. It is a one-dimensional simulation of the flight of Juno. The program will run in almost any implementation of BASIC with little or no change.
You can easily change the program to simulate other rocket flights. The lines to edit appear near the top of the listing.
rocketMass is the mass of the rocket in kilograms. The best way to get this
value is to weigh the rocket on a kitchen scale. The weight includes the
weight of the parachute and recovery wadding, but not the weight of the motor:
REM Rocket mass in kg, w/o the motor. rocketMass = 0.036
You can calculate the coefficient of drag using the techniques in Chapter 13. You can also estimate the Cd. Use a value of 0.4 to 0.6 for most rockets, with 0.4 reserved for polished rockets with airfoil fins. Go higher if the rocket has lots of decorations hanging off it:
Cd = 0.524: REM Coefficient of drag.
The frontal area of the rocket is the area at the base of the nose cone. Given the diameter of the base of the nose cone, the area is:
The area is in square meters:
REM Frontal area of the rocket. Ar = 0.000483
ρ (rho) is the density of the atmosphere in kilograms per cubic meter. The default value is the air density at sea level:
rho = 1.225: REM Density of the air.
Subtract about 4% per 1,000 feet if your launch site is significantly above sea level.
dt is the simulation time step. Lower numbers are generally more accurate,
but make the program take longer to run:
dt = 0.01: REM Simulation time step.
motorName$ is the filename of a motor file in RASP format. You can find these
files at http://www.thrustcurve.org. There are three preloaded
in techBASIC (the other two are Estes_A8.eng and Estes_B6.eng):
motorName$ = "Estes_C6.eng"
You can install other motor files using iTunes; see the techBASIC Quick Start Guide for details. You can find the techBASIC Quick Start Guide at the techBASIC documentation page.
Example A-1 lists the complete source for the Juno Simulation program.
REM Simple Text-Based Rocket Simulator.REMREM This simulation is set up to simulate a sea-level flight of Juno,REM a rocket in the book "Make: Rockets, Down to Earth Rocket Science."REM Change the variables in the next section to simulate a different rocketREM rocket flight. See the book for details on how this simulator works.DIMSHAREDthrust(50),time(50),mass(50)DIMSHAREDpropellantWeight,motorWeightDIMSHAREDboundsASINTEGERDIMSHAREDtokens(20)ASSTRING,tokenCountASINTEGERdebug=0REM Initialize the rocket data. Change these values for different rockets,REM rockets, motors, or flight conditions.DIMrocketMass,d,d0,v0,a,fg,fd,ft,t,f,dt,Ar,rho,CdREM Rocket mass in kg, w/o the motor.rocketMass=0.036Cd=0.524:REM Coefficient of drag.REM The Frontal area of the rocket.Ar=0.000483rho=1.225:REM Density of the air.dt=0.01:REM Simulation time step.motorName$="Estes_C6.eng"REM Load the motor data.CALLLoadMotor(motorName$)IFdebugTHENpropellantWeight,motorWeightFORi=1TOboundstime(i),thrust(i),mass(i)NEXTENDIFREM Run the simulation.MaxA=0.0MaxV=0.0fg=(rocketMass+motorWeight)*9.81DOt=t+dtfd=Cd*rho*v0*v0*Arft=Interpolate(t,time(),thrust())f=ft-fd-fga=f/(rocketMass+Interpolate(t,time(),mass()))IFa>MaxATHENMaxA=ad=d0+v0*dt+a*t0*t0/2d0=dv0=v0+a*dtfg=(rocketMass+Interpolate(t,time(),mass()))*9.81IFv0>MaxVTHENMaxV=v0IFdebugTHENt,d,v0,aLOOPUNTIL(t>1)AND(v0<0)REM Print the results."Maximum altitude = ";d;" meters.""Maximum velocity = ";MaxV;" m/s.""Maximum acceleration = ";MaxA;" m/s^2.""Ideal ejection delay = ";t-time(bounds);" seconds."ENDREM Use a specific time to interpolate in a table of time-based values.REMREM Inputs:REM t - The desired time.REM time - An array of times, from lowest to highest.REM value - A table of values, one for each elemnt element in the time array.REMREM Returns: A linearly interpolated value from the value array. If t isREM less than the first time value, the first value in the value arrayREM is returned. If t is greater that than the last time, the last value inREM the value array is returned.FUNCTIONInterpolate(t,time(),value())IFt<time(1)THENInterpolate=value(1)*t/time(1)ELSEIFt<time(bounds)THENDIMindexASINTEGERindex=1WHILEtime(index)<tindex=index+1WENDInterpolate=value(index-1)+_(t-time(index-1))*(value(index)-value(index-1))_/(time(index)-time(index-1))ELSEInterpolate=value(bounds)ENDIFENDIFENDFUNCTIONREM Load a motor file.REMREM Parameters:REM fileName - The name of the motor file.REMREM Global values set:REM propellantWeight - The total weight of the propellant in kg.REM motorWeight - The total weight of the motor, with propellantREM in kg.REM time - The times for which thrust data is available.REM thrust - The thrust at each time, in newtons.REM mass - The motor mass values at each time step.SUBLoadMotor(fileNameASSTRING)DIMaLineASSTRING,countASINTEGERREM Scan the file, reading the data.OPENfileNameFORINPUTAS#1bounds=-1WHILENOTEOF(1)LINEINPUT#1,aLineIFLEN(aLine)>0ANDLEFT$(aLine,1)<>";"THENCALLParse(aLine)bounds=bounds+1IFbounds=0THENpropellantWeight=VAL(tokens(5))motorWeight=VAL(tokens(6))ELSEtime(bounds)=VAL(tokens(1))thrust(bounds)=VAL(tokens(2))ENDIFENDIFWENDCLOSE#1REM Find the total impulse.DIMimpulseimpulse=TotalImpulse(time(),thrust(),bounds)IFdebugTHEN"Total Impulse = ";impulseREM Assume the mass loss is proportional to the impulse. FindREM the motor mass as a function of time.DIMcurrentMass,t0,f0,di,iASINTEGERcurrentMass=motorWeightFORi=1TOboundsdi=(f0+thrust(i))*(time(i)-t0)/2currentMass=currentMass-propellantWeight*di/impulsemass(i)=currentMassf0=thrust(i)t0=time(i)NEXTENDSUBREM A utility subroutine for LoadMotor that breaks a line into space-REM delimited strings. The tokens are placed in the global array tokens.REMREM Parameters:REM aLine - The line to parse.SUBParse(aLineASSTRING)REM Declare and initialize our local variables.DIMindexASINTEGERtokenCount=0REM Strip any leading space from the line.WHILELEFT$(aLine,1)=" "aLine=RIGHT$(aLine,LEN(aLine)-1)WENDREM Collect the tokens.WHILELEN(aLine)>0ANDtokenCount<10tokenCount=tokenCount+1index=SpaceIndex(aLine)IFindex=0THENtokens(tokenCount)=aLineaLine=""ELSEtokens(tokenCount)=LEFT$(aLine,index-1)aLine=RIGHT$(aLine,LEN(aLine)-index)WHILELEFT$(aLine,1)=" "aLine=RIGHT$(aLine,LEN(aLine)-1)WENDENDIFWENDENDSUBREM A utility function for Parse that finds the index of the next spaceREM character.REMREM Parameters:REM sval - The string.REMREM Returns: The index of the next space, or 0 if there are none.FUNCTIONSpaceIndex(svalASSTRING)DIMindexASINTEGER,fundASINTEGERfound=0index=1WHILE(index<LEN(sval))AND(found=0)IFMID$(sval,index,1)=" "THENfound=1ELSEindex=index+1ENDIFWENDIFfound=0THENindex=0ENDIFSpaceIndex=indexENDFUNCTIONREM Find the total impulse of the motor.REMREM Parameters:REM time - The time steps where motor thrust is available.REM thrust - The thrust at each time step.REM bounds - The number of data points in time() and thrust().REMREM Returns: The total impuls impulse in newton-seconds.FUNCTIONTotalImpulse(time(),thrust(),boundsASINTEGER)DIMt0,f0,impulse,iASINTEGERFORi=1TOboundsimpulse=impulse+(f0+thrust(i))*(time(i)-t0)/2t0=time(i)f0=thrust(i)NEXTTotalImpulse=impulseENDFUNCTION
SRockS
The Simple Rocket Simulator (SRockS) is essentially the Juno Simulation from the previous section with a user interface for the iPhone and iPod touch. It will also run on the iPad, of course. It is preinstalled in techBASIC and techBASIC Sampler in the Maker Books folder.
The rocket mass is given in kilograms. The best way to get this value is to weigh the rocket on a kitchen scale. As before, the weight includes the weight of the parachute and recovery wadding, but not the weight of the motor.
You can calculate the coefficient of drag using the techniques in Chapter 13. You can also estimate the Cd. Use a value of 0.4 to 0.6 for most rockets, with 0.4 reserved for polished rockets with airfoil fins. Go higher if the rocket has lots of decorations hanging off it.
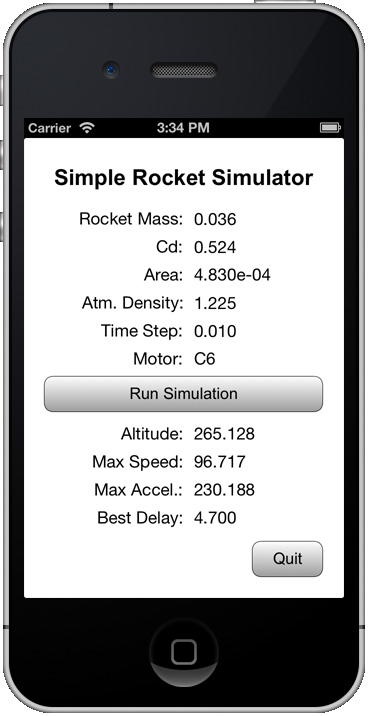
The area of the rocket is the frontal area, at the base of the nose cone. Tap on the value to select a new value. A list of common body tube sizes appears. Select the appropriate body tube size and the frontal area will be filled in automatically. The area is in square meters.
Atm. density is the density of the atmosphere in kilograms per cubic meter. Subtract about 4% per 1,000 feet if your launch site is significantly above sea level.
The time step is the simulation time step. Lower numbers are generally more accurate, but make the program take longer to run.
Tap the motor value to select a different motor. A picker will appear that will show all of the installed motor files. Select the new motor and tap the Done button. You can find additional motor files at http://www.thrustcurve.org. Follow the instructions in the techBASIC Quick Start Guide to install new motor files using iTunes. You can find the techBASIC Quick Start Guide at the techBASIC documentation page.
Example A-2 shows the complete source for the SRockS program.
REM Simple Rocket Simulator.REMREM One-dimensional rocket flight simulator.REM Motor variables.DIMpropellantWeight,motorWeight,motorNameASSTRINGDIMthrust(1),time(1),mass(1)DIMmotorNames(1)ASSTRING,motorFileNames(1)ASSTRINGREM GUI elements.DIMtitleLabelASLabelDIMquitButtonASButton,simulateButtonASButtonDIMmassTextFieldasTextField,massLabelasLabelDIMcdTextFieldasTextField,cdLabelasLabelDIMarValueLabelasLabel,arPickerASPicker,arLabelasLabelDIMrhoTextFieldasTextField,rhoLabelasLabelDIMdtTextFieldasTextField,dtLabelasLabelDIMmotorValueLabelasLabel,motorPickerASPicker,motorLabelasLabelDIMaltitudeValueLabelasLabel,altitudeLabelasLabelDIMspeedValueLabelasLabel,speedLabelasLabelDIMaccelerationValueLabelasLabel,accelerationLabelasLabelDIMdelayValueLabelasLabel,delayLabelasLabelDIMpickerBackgroundASLabel,pickerDoneButtonASButtonREM Initialize the rocket data. Change these values for different rockets,REM motors, or flight conditions.DIMrocketMass,d,d0,v0,a,fg,fd,ft,t,f,dt,Ar,rho,CdrocketMass=0.036:REM Rocket mass in kilograms, without the motor.Cd=0.524:REM Coefficient of drag.Ar=0.000483:REM Frontal area of the rocket.rho=1.225:REM Density of the air.dt=0.01:REM Simulation time step.REM Set up the program.loadMotorsmotorName$=motorNames(1)motorFileName$=motorFileNames(1)initGUIsimulateshowAboutENDREM Create a label and an initialized TextField.REMREM Parameters:REM x, y - The top-left location for the label.REM title - The title for the label.REM labelCtrl - The label control.REM textFieldCtrl - The text field control.REM value - The initial value.REM scientific - Format the value using scientific notation?SUBcreateEditable(x,_y,_titleASSTRING,_BYREFlabelCtrlASLabel,_BYREFtextFieldCtrlASTextField,_value,_scientificASINTEGER)labelCtrl=Graphics.newLabel(x,y,140)labelCtrl.setText(title)labelCtrl.setAlignment(3)textFieldCtrl=Graphics.newTextField(x+150,y,140)textFieldCtrl.setText(format(value,scientific))ENDSUBREM Create a label, button, and picker. The button displays a value.REM That value can be changed using a picker, which is displayed whenREM the user taps on the button and hidden when the user picks a valueREM or taps on a Done button, which is shared among all picker controls.REMREM Parameters:REM x, y - The top-left location for the label.REM title - The title for the label.REM labelCtrl - The label control.REM valueCtrl - The label for displaying a value.REM pickerCtrl - The picker control.REM values - The values to display in the picker control.REM value - The initial value.REM scientific - Format the value using scientific notation?SUBcreatePicker(x,_y,_titleASSTRING,_BYREFlabelCtrlASLabel,_BYREFvalueCtrlASLabel,_value,_scientificASINTEGER)labelCtrl=Graphics.newLabel(x,y,140)labelCtrl.setText(title)labelCtrl.setAlignment(3)valueCtrl=Graphics.newLabel(x+150,y,140)valueCtrl.setText(format(value,scientific))ENDSUBREM Create a label and an initialized TextField.REMREM Parameters:REM x, y - The top-left location for the label.REM title - The title for the label.REM labelCtrl - The label control.REM valueCtrl - The label for displaying a value.REM value - The initial value.REM scientific - Format the value using scientific notation?SUBcreateUneditable(x,_y,_titleASSTRING,_BYREFlabelCtrlASLabel,_BYREFvalueCtrlASLabel,_value,_scientificASINTEGER)labelCtrl=Graphics.newLabel(x,y,140)labelCtrl.setText(title)labelCtrl.setAlignment(3)valueCtrl=Graphics.newLabel(x+150,y,140)valueCtrl.setText(format(value,scientific))ENDSUBREM Format a floating-point value for display. This is used for allREM fields to give a consistent, readable view of values.REMREM Parameters:REM value - The value to format.REM scientific - Format the value using scientific notation?REMREM Returns: The formatted value.FUNCTIONformat(value,scientificASINTEGER)ASSTRINGDIMs$IFscientificTHEN$s$USING"#######.###^^^^^^";value;ELSE$s$USING"#######.###";value;ENDIFs$=LTRIM(s$)format=s$ENDFUNCTIONREM Set up the user interface.SUBinitGUISystem.showGraphics(1)Graphics.setToolsHidden(1)width=Graphics.widthheight=Graphics.heightREM Add a title.titleLabel=Graphics.newLabel(20,20,width-40,40)titleLabel.setText("Simple Rocket Simulator")titleLabel.setAlignment(2)titleLabel.setFont("Sans-Serif",22,1)REM Create labels and initialized text boxes for the editable rocketREM components.DIMy,dyy=70dy=28createEditable(20,y,"Rocket Mass:",massLabel,massTextField,_rocketMass,0)y=y+dycreateEditable(20,y,"Cd:",cdLabel,cdTextField,Cd,0)y=y+dycreatePicker(20,y,"Area:",arLabel,arValueLabel,Ar,1)y=y+dycreateEditable(20,y,"Atm. Density:",rhoLabel,rhoTextField,rho,0)y=y+dycreateEditable(20,y,"Time Step:",dtLabel,dtTextField,dt,0)y=y+dycreatePicker(20,y,"Motor:",motorLabel,motorValueLabel,0,0)motorValueLabel.setText(motorName$)y=y+dyREM Create the buttons.quitButton=newButton(width-92,height-57,-1,"Quit")simulateButton=newButton(20,y,280,"Run Simulation")REM Create the labels and uneditable text fields for the results.y=y+47createUneditable(20,y,"Altitude:",altitudeLabel,_altitudeValueLabel,0,0)y=y+dycreateUneditable(20,y,"Max Speed:",speedLabel,speedValueLabel,0,0)y=y+dycreateUneditable(20,y,"Max Accel.:",accelerationLabel,_accelerationValueLabel,0,0)y=y+dycreateUneditable(20,y,"Best Delay:",delayLabel,delayValueLabel,0,_0)REM Create the pickers and related objects. These are created last so theyREM will show up on top of other controls.pickerBackground=Graphics.newLabel(0,70,width,height-70)pickerBackground.setHidden(1)pickerDoneButton=newButton((width-72)/2,320,-1,"Done")pickerDoneButton.setHidden(1)DIMvalues(7)ASSTRINGvalues(1)="BT-5"values(2)="BT-20"values(3)="BT-50"values(4)="BT-55"values(5)="BT-60"values(6)="BT-70"values(7)="BT-80"arPicker=Graphics.newPicker(0,80)arPicker.setHidden(1)arPicker.insertRows(values,1)arPicker.selectRow(3)motorPicker=Graphics.newPicker(0,80)motorPicker.setHIdden(1)motorPicker.insertRows(motorNames,1)motorPicker.selectRow(1)ENDSUBREM Use a specific time to interpolate in a table of time-based values.REMREM Inputs:REM t - The desired time.REM time - An array of times, from lowest to highest.REM value - A table of values, one for each elemnt in the time array.REMREM Returns: A linearly interpolated value from the value array. If t isREM less than the first time value, the first value in the value arrayREM is returned. If t is greater than the last time, the last value inREM the value array is returned.FUNCTIONinterpolate(t,time(),value())IFt<time(1)THENinterpolate=value(1)*t/time(1)ELSEIFt<time(UBOUND(time,1))THENDIMindexASINTEGERindex=1WHILEtime(index)<tindex=index+1WENDinterpolate=value(index-1)+_(t-time(index-1))*(value(index)-value(index-1))_/(time(index)-time(index-1))ELSEinterpolate=value(UBOUND(value,1))ENDIFENDFUNCTIONREM Load a motor file.REMREM The values for the motor file are placed in global variables. TheREM variables set are:REMREM propellantWeight - The total weight of the propellant in kg.REM motorWeight - The total weight of the motor, with propellant, in kg.REM motorName - The name for this motor.REM time - The times for which thrust data is available.REM thrust - The thrust at each time, in newtons.REM mass - The motor mass values at each time step.REMREM Parameters:REM fileName - The name of the motor file.SUBloadMotor(fileNameASString)DIMaLineASSTRING,tokens(1)ASSTRING,countASINTEGERREM Scan the file, counting the non-comment lines. This givesREM the number of data points.OPENfileNameFORINPUTAS#1WHILENOTEOF(1)LINEINPUT#1,aLineIFLEN(aLine)>0ANDLEFT(aLine,1)<>";"THENcount=count+1ENDIFWENDCLOSE#1REM Dimension arrays to hold the time, thrust, and weight.DIMtm(count-1),tr(count-1),ma(count-1)REM Rescan the file, reading the data.OPENfileNameFORINPUTAS#1count=0WHILENOTEOF(1)LINEINPUT#1,aLineIFLEN(aLine)>0ANDLEFT(aLine,1)<>";"THENtokens=parse(aLine)IFcount=0THENmotorName=tokens(1)propellantWeight=VAL(tokens(5))motorWeight=VAL(tokens(6))ELSEtm(count)=VAL(tokens(1))tr(count)=VAL(tokens(2))ENDIFcount=count+1ENDIFWENDCLOSE#1REM Find the total impulse.DIMimpulseimpulse=totalImpulse(tm,tr)IFdebugTHEN"Total Impulse = ";impulseREM Assume the mass loss is proportional to the impulse. FindREM the motor mass as a function of time.DIMcurrentMass,t0,f0,di,iASINTEGERcurrentMass=motorWeightFORi=1TOUBOUND(tm,1)di=(f0+tr(i))*(tm(i)-t0)/2currentMass=currentMass-propellantWeight*di/impulsema(i)=currentMassf0=tr(i)t0=tm(i)NEXTREM Copy the values to the global arrays.time=tmthrust=trmass=maENDSUBREM Scans the document directory for motor files. Any that are found areREM placed in the two arrays of motors. The arrays are:REMREM motorNames - The display names for the motors.REM motorFileNames - The filenames for each motor file.SUBloadMotorsDIMfileNameASSTRING,countASINTEGER,iASINTEGERcount=0fileName=DIR("*")WHILEfileName<>""IFLCASE(RIGHT(fileName,4))=".eng"THENcount=count+1loadMotor(fileName)DIMnames(count)ASSTRING,fileNames(COUNT)ASSTRINGFORi=1TOcount-1names(i)=motorNames(i)fileNames(i)=motorFileNames(i)NEXTnames(count)=motorNamefileNames(count)=fileNamemotorNames=namesmotorFileNames=fileNamesENDIFfileName=DIRWENDmotorNamesmotorFileNamesENDSUBREM Creates a new button with a gradient fill.REMREM Parameters:REM x - Horizontal location.REM y - Vertical location.REM width - Width of the button, or -1 for the default width.REM title - Name of the button.REMREM Returns: The new button.FUNCTIONnewButton(x,y,width,titleASSTRING)ASButtonDIMbASButtonIFwidth=-1THENwidth=72b=Graphics.newButton(x,y,width)b.setTitle(title)b.setBackgroundColor(1,1,1)b.setGradientColor(0.6,0.6,0.6)newButton=bENDFUNCTIONREM A utility subroutine for loadMotor that breaks a line into space-REM delimited strings.REMREM Parameters:REM aLine - The line to parse.REMREM Returns: An array of strings.FUNCTIONparse(aLineASSTRING)(1)ASSTRINGREM Declare and initialize our local variables.DIMtokens(10)ASSTRING,countASINTEGER,indexASINTEGERcount=0REM Strip any leading space from the line.WHILELEFT(aLine,1)=" "aLine=RIGHT(aLine,LEN(aLine)-1)WENDREM Collect the tokens.WHILELEN(aLine)>0ANDcount<10count=count+1index=POS(aLine," ")IFindex=0THENtokens(count)=aLineaLine=""ELSEtokens(count)=LEFT(aLine,index)aLine=RIGHT(aLine,LEN(aLine)-index)WHILELEFT(aLine,1)=" "aLine=RIGHT(aLine,LEN(aLine)-1)WENDENDIFWENDREM Create an array for the final tokens and return them.DIMfinalTokens(count)ASSTRINGWHILEcount>0finalTokens(count)=tokens(count)count=count-1WENDparse=finalTokensENDFUNCTIONREM Shows the About alert when the program starts.SUBshowAboutabout$="One-dimensional simulation of a model rocket flight."about$=about$&CHR(10)&CHR(10)&"See the book, Make: Rockets, "_&"for a complete description of this app."about$=about$&CHR(10)&CHR(10)&"This app takes basic "_&"information about a model rocket and simulates its flight to "_&"find the maximum altitude, acceleration, and speed and the "_&"ideal ejection charge."about$=about$&CHR(10)&CHR(10)&"All units are in the meters-"_&"kilograms-seconds (MKS) system. Cd is the coefficient of drag, "_&"generally 0.4 to 0.7 for most model rockets. Area is the "_&"frontal area of the body tube. Atm. density is the atmospheric "_&"density, preset for sea level. Time step is the simulation "_&"time step."about$=about$&CHR(10)&CHR(10)&"Tap a value to change it. Tap "_&"Run Simulation to run the simulation with the new values."i=Graphics.showAlert("About This Sample",about$)ENDSUBREM Simulate a flight with the current flight characteristics.SUBsimulateREM Load the motor data.loadMotor(motorFileName$)motorFileName$IFdebugTHENpropellantWeight,motorWeightFORi=1TOUBOUND(time,1)time(i),thrust(i),mass(i)NEXTENDIFREM Get the latest values for the simulation.rocketMass=VAL(massTextField.getText)Cd=VAL(cdTextField.getText)rho=VAL(rhoTextField.getText)dt=VAL(dtTextField.getText)REM Run the simulation.DIMMaxA,MaxV,fg,t,fd,ft,f,a,d,d0,v0MaxA=0.0MaxV=0.0fg=(rocketMass+motorWeight)*9.81DOt=t+dtfd=Cd*rho*v0*v0*Arft=interpolate(t,time,thrust)f=ft-fd-fga=f/(rocketMass+interpolate(t,time,mass))IFa>MaxATHENMaxA=ad=d0+v0*dt+a*t0*t0/2d0=dv0=v0+a*dtfg=(rocketMass+interpolate(t,time,mass))*9.81IFv0>MaxVTHENMaxV=v0IFDEBUGTHENt,d,v0,aLOOPUNTILt>1ANDv0<0REM Show the results.altitudeValueLabel.setText(format(d,0))speedValueLabel.setText(format(MaxV,0))accelerationValueLabel.setText(format(MaxA,0))delayValueLabel.setText(format(t-time(UBOUND(time,1)),0))ENDSUBREM Find the total impulse of the motor.REMREM Parameters:REM time - The time steps where motor thrust is available.REM thrust - The thrust at each time step.REMREM Returns: The total impulse in newton-seconds.FUNCTIONtotalImpulse(time(),thrust())DIMt0,f0,impulse,iASINTEGERFORi=1TOUBOUND(time,1)impulse=impulse+(f0+thrust(i))*(time(i)-t0)/2t0=time(i)f0=thrust(i)NEXTtotalImpulse=impulseENDFUNCTIONREM Called when a touch ends, this subroutine checks to see if theREM touch was inside one of the labels used to trigger the appearanceREM of a picker and, if so, displays the picker.REMREM Parameters:REM e - The touch event that triggered this call.SUBtouchesEnded(eASEVENT)DIMwhere(1,2),x,ywhere=e.wherex=where(1,1)y=where(1,2)IFx>=arValueLabel.x_ANDx<=arValueLabel.x+arValueLabel.width_ANDy>=arValueLabel.y_ANDy<=arValueLabel.y+arValueLabel.heightTHENpickerBackground.setHidden(0)arPicker.setHidden(0)pickerDoneButton.setHidden(0)ELSEIFx>=motorValueLabel.x_ANDx<=motorValueLabel.x+motorValueLabel.width_ANDy>=motorValueLabel.y_ANDy<=motorValueLabel.y+motorValueLabel.heightTHENpickerBackground.setHidden(0)motorPicker.setHidden(0)pickerDoneButton.setHidden(0)ENDIFENDSUBREM Handle a tap on one of the buttons.REMREM Parameters:REM ctrl - The button that was tapped.REM time - The time when the event occurred.SUBtouchUpInside(ctrlASButton,timeASDOUBLE)IFctrl=quitButtonTHENSTOPELSEIFctrl=pickerDoneButtonTHENarPicker.setHidden(1)motorPicker.setHidden(1)pickerDoneButton.setHidden(1)pickerBackground.setHidden(1)SELECTCASEarPicker.selectionCASE1:Ar=0.000150CASE2:Ar=0.000275CASE3:Ar=0.000483CASE4:Ar=0.000892CASE5:Ar=0.001359CASE6:Ar=0.002463CASE7:Ar=0.003390ENDSELECTarValueLabel.setText(format(Ar,1))motorName$=motorNames(motorPicker.selection)motorValueLabel.setText(motorName$)motorFileName$=motorFileNames(motorPicker.selection)loadMotor(motorFileName$)ELSEIFctrl=simulateButtonTHENsimulateENDIFENDSUB
Theodolite
Theodolite is a simple BASIC program that should run in just about any modern BASIC compiler. It takes the baseline and angles from two theodolites and calculates the altitude of a rocket. See Chapter 8 for a detailed description of how to build and use theodolites to track rockets.
REM Calculate the altitude of a model rocket using angles fromREM two theodolites.REM Get the baseline and angles.INPUT"Baseline length: ";BREM Find the conversion from degrees to radians.DTR=3.1415926535/180REM Get the angles for the first tracker.INPUT"Tracker 1 azimuth: ";alpha1INPUT"Tracker 1 elevation: ";epsilon1alpha1=alpha1*DTRepsilon1=epsilon1*DTRREM Get the angles for the second tracker.INPUT"Tracker 2 azimuth: ";alpha2INPUT"Tracker 2 elevation: ";epsilon2alpha2=alpha2*DTRepsilon2=epsilon2*DTRREM Calculate the altitude using the vertical midpoint method.A1=B*SIN(alpha2)*TAN(epsilon1)/SIN(alpha1+alpha2)A2=B*SIN(alpha1)*TAN(epsilon2)/SIN(alpha1+alpha2)A=(A1+A2)/2C=ABS((A1-A2)/(2*A))"Vertical Midpoint Method:"CALLReport(A,C)REM Calculate the altitude using the geodesic method.se1=SIN(epsilon1)se2=SIN(epsilon2)ce1=COS(epsilon1)ce2=COS(epsilon2)sa1=SIN(alpha1)sa2=SIN(alpha2)ca1=COS(alpha1)ca2=COS(alpha2)f=se1*se2-ce1*ce2*(ca1*ca2-sa1*sa2)d1=B*(ce1*ca1+f*ce2*ca2)/(1-f*f)d2=B*(ce2*ca2+f*ce1*ca1)/(1-f*f)A=d1*d2*(se1+se2)/(d1+d2)C=B*ABS((ce2*se1*sa2-ce1*se2*sa1)/(A*SQR(1-f*f)))"Geodesic Method:"CALLReport(A,C)ENDREM Print the results.REMREM Inputs:REM A - The altitude.REM C - Track closed value.SUBReport(A,C)" Altitude: ";AIFC<=0.1THEN" Closed track; C = ";CELSE" Track not closed; C = ";CENDIFENDSUB