CONFORMAL MAPPING
71. GENERAL PRINCIPLES OF CONFORMAL MAPPING
It will be recalled that a single-valued function w = f(z) analytic on a domain G is conformal at every point z0 ∈ G such that f′(z0) ≠ 0 (see Theorem 3.4). Moreover, according to Theorem 12.9, the image ![]() = f(G) of the domain G under the mapping w = f(z) is itself a domain. Thus, given a function f(z) analytic on G, where f′(z) is nonvanishing on G, one might be tempted to describe the mapping of G onto
= f(G) of the domain G under the mapping w = f(z) is itself a domain. Thus, given a function f(z) analytic on G, where f′(z) is nonvanishing on G, one might be tempted to describe the mapping of G onto ![]() = f(G) as a conformal mapping. However, in any theory involving “mappings,” it seems reasonable to insist that the roles of the domains G and
= f(G) as a conformal mapping. However, in any theory involving “mappings,” it seems reasonable to insist that the roles of the domains G and ![]() be interchangeable: This leads to the additional requirement that the inverse function z = f–1(w) be single-valued, or equivalently that the original function w = f(z) be one-to-one:
be interchangeable: This leads to the additional requirement that the inverse function z = f–1(w) be single-valued, or equivalently that the original function w = f(z) be one-to-one:
DEFINITION. Let G and![]() be two domains in the finite plane,1 and let w = f(z) be a one-to-one analytic function mapping G onto
be two domains in the finite plane,1 and let w = f(z) be a one-to-one analytic function mapping G onto![]() . Then w = f(z) is called a conformal mapping of G onto
. Then w = f(z) is called a conformal mapping of G onto ![]() , and w = f(z) is said to map G conformally onto
, and w = f(z) is said to map G conformally onto ![]() . Moreover,
. Moreover, ![]() is called a conformal image of G.
is called a conformal image of G.
Remark. Note that if f(z) is one-to-one on G, then f′(z) is automatically nonvanishing on G (see Theorem 12.8 and its corollaries). Hence, any conformal mapping of G is conformal at every point of G.
Example 1. Let w = f(z) = ez, and let G be any domain containing two points z1, z2 differing by an integral multiple of 2πi Then f′(z) is non-vanishing on G, and hence f(z) is conformal at every point of G and one-to-one in a sufficiently small neighborhood of every point of G (recall Theorem 12.7). However, f(z) is not one-to-one on G itself, since it takes the same value at the points z1 and z2. Therefore w = f(z) is not a conformal mapping of G onto ![]() = f(G).
= f(G).
Example 2. Let w = f(z) = ez as in Example 1, but this time let G be a domain containing no pair of points differing by an integral multiple of 2πi2. Then w = f(z) is a conformal mapping of G onto ![]() = f(G).
= f(G).
THEOREM 15.1. If ![]() is a conformal image of a domain G, then G is a conformal image of
is a conformal image of a domain G, then G is a conformal image of ![]() .
.
Proof. Apply Rule 5, p. 48 after noting that the inverse of a one-to-one analytic function is continuous (why?).
THEOREM 15.2. If ![]() is a conformal image of a domain G and if
is a conformal image of a domain G and if ![]() * is a conformal image of
* is a conformal image of ![]() , then
, then ![]() * is a conformal image of G.
* is a conformal image of G.
Proof. Apply Rule 4, p. 46.
It is now a natural problem to look for classes of domains which are conformal images of each other. For multiply connected domains, this is a complicated matter, but for simply connected domains the problem has a definitive solution given by
THEOREM 15.3 (Riemann’s mapping theorem)3. Any simply connected domain G in the finite plane other than the whole plane is a conformal image of the open unit disk.
COROLLARY. Let G and ![]() be any two simply connected domains in the finite plane other than the whole plane. Then G and
be any two simply connected domains in the finite plane other than the whole plane. Then G and ![]() are conformal images of each other.
are conformal images of each other.
Proof. Use Theorems 15.1 and 15.2.
Remark 1. It is clear why the case where G is the whole plane must be excluded in Theorem 15.3. In fact, the existence of a one-to-one analytic function w = f(z) mapping the whole plane onto the unit disk implies |f(z)| < 1 for all z, i.e., f(z) is a bounded entire function. But then by Liouville’s theorem (Theorem 10.7), f(z) ≡ const, which is absurd.
Remark 2. The function w = f(z) mapping G conformally onto ![]() = f(G) is not unique. To see this, map G conformally onto the unit disk, then map the unit disk conformally onto itself, and finally map the unit disk conformally onto
= f(G) is not unique. To see this, map G conformally onto the unit disk, then map the unit disk conformally onto itself, and finally map the unit disk conformally onto ![]() . The result is a conformal mapping of G onto
. The result is a conformal mapping of G onto ![]() . However, the unit disk can be mapped conformally onto itself in infinitely many ways (see Example 2, p. 109), and hence G can be mapped conformally onto
. However, the unit disk can be mapped conformally onto itself in infinitely many ways (see Example 2, p. 109), and hence G can be mapped conformally onto ![]() in infinitely many ways.
in infinitely many ways.
The freedom of choice in the conformal mapping of G onto ![]() is eliminated in precisely the same way as for the conformal mapping of a disk onto itself (see Sec. 28, Prob. 4):
is eliminated in precisely the same way as for the conformal mapping of a disk onto itself (see Sec. 28, Prob. 4):
THEOREM 15.4 (Uniqueness theorem for conformal mappings). Let G be the same as in Theorem 15.3, and let z0 be an arbitrary point of G. Then there exists a unique function w = f(z) which maps G conformally onto the disk |w| < 1 and satisfies the conditions
![]()
Proof. Suppose w = g(z) is another function satisfying the same conditions as w = f(z). Then the function
![]()
is analytic on the unit disk, satisfies the conditions
![]()
and maps the unit disk conformally onto itself. Therefore, according to Schwarz’s lemma (Theorem 12.12),
![]()
i.e.,
![]()
for all z ∈ G. But then, interchanging the roles of f(z) and g(z), we obtain
![]()
which together with (15.1) implies
![]()
![]()
Applying Schwarz’s lemma again to (15.2), we conclude that
![]()
But φ′(0) > 0 and hence eiα = 1, i.e.,
![]()
It follows that
![]()
for all z ∈G, as asserted.
It is often possible to infer that w = f(z) is a conformal mapping of a domain G onto ![]() = f(G) from a knowledge of the behavior of f(z) on the boundary of G. The following is a typical result of this kind:
= f(G) from a knowledge of the behavior of f(z) on the boundary of G. The following is a typical result of this kind:
THEOREM 15.5. Given a closed rectifiable Jordan curve γ, suppose f(z) is analytic on ![]() and one-to-one on γ. Then f(z) is analytic on I(γ), which it maps conformally onto I(Γ) where Γ = f(γ).
and one-to-one on γ. Then f(z) is analytic on I(γ), which it maps conformally onto I(Γ) where Γ = f(γ).
Proof. First we note that Γ is itself a closed rectifiable Jordan curve (see Prob. 7), while f[I(γ)] is a domain (see Theorem 12.9). Let w1 be an arbitrary point of I(Γ). According to the argument principle (Theorem 12.4), the number of w1-points of f(z) inside γ minus the number of poles of f(z) inside γ equals v, the number of circuits around the point w1 made by the point w = f(z) as the point z traverses γ once in the positive direction. A priori, v can only equal –1 or +1, since Γ is a closed Jordan curve.4 But f(z) has no poles inside γ, and hence v must equal +1, i.e., f(z) takes every value w1 ∈ I(Γ) once, and we have incidentally proved that w = f(z) traverses Γ in the same direction as z traverses γ. It follows that
![]()
Next let w2 be an arbitrary point of E(Γ). Then, as z traverses the curve γ, the point w = f(z) traverses the curve Γ and obviously cannot wind around w2. Again applying the argument principle, and the fact that f(z) has no poles inside γ, we find that f(z) has no w2-points inside γ, i.e., E(Γ) ∩ f[I(γ)] = 0. We also have Γ ∩ f[I(γ)] = 0, since w ∈ Γ, w ∈ f[I(γ)], implies that some neighborhood ![]() (w) is contained in f [I(γ)]. But this contradicts what was just proved, since every neighborhood of a point of Γ must contain points of E(Γ). Therefore
(w) is contained in f [I(γ)]. But this contradicts what was just proved, since every neighborhood of a point of Γ must contain points of E(Γ). Therefore
![]()
and, together, (15.3) and (15.4) imply the desired result f[I(γ)] = I(Γ). Moreover, as already noted, every point of I(Γ) has precisely one inverse image in I(γ). It follows that f(z) is one-to-one on I(γ), which it maps conformally onto I](γ).
Theorem 15.5 can be generalized in a number of ways. One of these is particularly important in the applications and will be needed in the next two sections:
THEOREM 15.6.5 Let γ be the real axis and D the open upper half-plane. Suppose f(z) is continuous on ![]() , analytic on
, analytic on ![]() except at a finite number of points of γ, and one-to-one on γ which it maps into a closed rectifiable Jordan curveΓ. Then f(z) is one-to -one on D, which it maps conformally onto I(Γ).
except at a finite number of points of γ, and one-to-one on γ which it maps into a closed rectifiable Jordan curveΓ. Then f(z) is one-to -one on D, which it maps conformally onto I(Γ).
Problem 1 (Ml, p. 382). Interpret Schwarz’s lemma geometrically.
Problem 2. Generalize Riemann’s mapping theorem to the case where G is a simply connected domain in the extended plane and simple connectedness has the same meaning as in Sec. 12, Prob. 9.
Hint. Use the preliminary transformation ζ = 1/z to map G conformally onto a domain in the finite plane.
Problem 3. Generalize the corollary to Riemann’s mapping theorem to the case where G and ![]() are both simply connected domains in the extended plane.
are both simply connected domains in the extended plane.
Hint. The function mapping G onto ![]() is now allowed to have one pole.
is now allowed to have one pole.
Problem 4. Can the finite plane with the origin deleted be mapped conformally onto the open unit disk with the origin deleted?
Problem 5 (M2, p. 116). Prove that if f(z) is one-to-one and analytic in the whole plane except for one pole, then f(z) is a Möbius transformation.
Problem 6 (M2, p. 118). Prove that if a sequence {fn(z)} is uniformly convergent on every compact subset of a domain G and if every term fn(z) is one-to-one and analytic on G, then the limit function
![]()
is also one-to-one and analytic on G, unless f(z) = const.
Hint. Use Hurwitz’s theorem (Theorem 12.6).
Problem 7 (Ml, p. 305). Prove that the analytic image of a rectifiable curve is rectifiable.
Problem 8 (M2, p. 119). Given a closed rectifiable Jordan curve γ, suppose f(z) is analytic on ![]() and one-to-one on γ. Prove that f(z) is one-to-one on E(γ), which it maps conformally onto I(Γ) where Γ = f(γ).
and one-to-one on γ. Prove that f(z) is one-to-one on E(γ), which it maps conformally onto I(Γ) where Γ = f(γ).
72. MAPPING OF THE UPPER HALF-PLANE ONTO A RECTANGLE
To illustrate the application of the results of the preceding section, consider the function
![]()
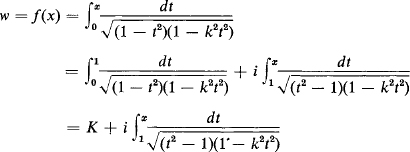
known as the elliptic integral of the first kind (in Legendre’s form), where the path of integration is any rectifiable curve joining the points 0 and z. The function
![]()
is double-valued, and has first-order branch points at t = ±1/ and t = ± 1/k (cf. Remark 3, p. 78). Since these points all lie on the real axis, we can define two single-valued analytic branches of (15.6) in the z-plane cut along the segments – 1/k ≤ x ≤ –1 and 1 ≤ x ≤ l/k of the real axis (see Prob. 1), in particular, in the upper half-plane D: Im z > 0. Of these two branches which take values with opposite signs at every point, we choose the one which takes positive values when t belongs to the interval (0, l).6 In a neighborhood |z| > l/k of the point at infinity, the integrand in (15.5) has the expansion

which implies
![]()
where C is a constant. Therefore it is clear that both branches of f(z) are analytic at infinity. Moreover, both branches are continuous on ![]() .
.
With a view to eventually applying Theorem 15.6, we now consider the image of γ under the mapping (15.5). In the interval 0 < x < 1, we have
![]()
which is positive and increases from 0 to
![]()
as x goes from 0 to 1. In the interval 1 < x < 1/k, the integrand in (15.5) becomes
![]()
Here the sign cannot be chosen arbitrarily, but must agree with our previous choice of the branch of (15.6), in order to guarantee continuity of this branch on ![]() . Writing (1 – t2)(1 – k2t2) in the form
. Writing (1 – t2)(1 – k2t2) in the form
![]()
we observe that in going from the interval 0 < x < 1 to the interval 1 < x < 1/k, the change in Arg g(t) equals – π.7 In fact, the change in Arg g(t) equals the sum of the changes in arguments of all the separate factors in (15.8), but none of these arguments changes except Arg(t – 1), which changes by – π. Therefore the change in Arg ![]() is –π/2, so that Arg
is –π/2, so that Arg ![]() becomes
becomes
![]()
since Arg ![]() = 2kπ for 0 < t < 1. Thus we see that of the two values
= 2kπ for 0 < t < 1. Thus we see that of the two values ![]() in (15.7), the correct choice is
in (15.7), the correct choice is ![]() . It follows that
. It follows that
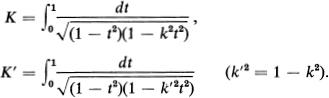
for 1 < x < 1/k. Therefore, as the point z = x traverses the interval 1 < x < 1/k, the image point w = f(x) traverses the line segment parallel to the imaginary axis going from the point K to the point K+ iK′, where
![]()
By making the substitution
![]()
and then changing τ back to t, we can write the integral for K′ in the same form as the integral for K:
![]()
Next we consider the interval l/k < x < + ∞. In this interval, the integrand in (15.5) becomes
![]()
where, as before, the sign cannot be chosen arbitrarily. In fact, writing (t2 – 1)(1 – k2t2) in the form
![]()
we observe that in going from the interval 1 < x < l/k to the interval 1/k < x < + ∞, the change in Arg h(t) equals –π, i.e., the change in Arg [t – (1/k)]. Therefore the change in Arg ![]() is –π/2, so that Arg
is –π/2, so that Arg ![]() becomes
becomes
![]()
[cf. (15.9)]. Thus we see that of the two values ![]() in (15.10), the correct choice is
in (15.10), the correct choice is ![]() . It follows that
. It follows that
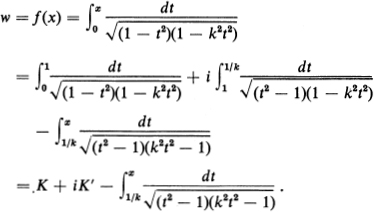
As x increases from 1/k to + ∞, the last integral on the right becomes
![]()
where we make the change of variables t = 1/kτ. Correspondingly, the image point w = f(x) describes the line segment parallel to the real axis going from the point K + iK′ to the point iK′
In just the same way, we see that as x moves along the real axis first from 0 to –1, then from –1 to –1/k and finally from – 1/k to – ∞, the point w = f(x) first describes the segment from 0 to – K, then the segment from –K to – K + iK′, and finally the segment from –K + iK′ to iK′. Thus w = f(x) is a one-to-one mapping of the real axis onto the rectangular contour with vertices –K, K, K + iK′ and – K + iK′, where
It follows from Theorem 15.6 that w = f(z) is one-to-one in the upper half-plane, which it maps conformally onto the indicated rectangle.
Now consider the expression
which is the ratio of the altitude of the rectangle to its base. As the parameter k (0 < k < 1) increases from 0 to 1, the denominator increases from
![]()
to ∞. At the same time, ![]() decreases from 1 to 0, so that the numerator decreases from ∞ to π/2. Therefore, as k increases from 0 to 1, the ratio λ(k) = K′/2K decreases continuously from ∞ to 0. It follows that given any rectangle with base 2a and altitude b, we can find a unique value of k (0 < k <1) such that
decreases from 1 to 0, so that the numerator decreases from ∞ to π/2. Therefore, as k increases from 0 to 1, the ratio λ(k) = K′/2K decreases continuously from ∞ to 0. It follows that given any rectangle with base 2a and altitude b, we can find a unique value of k (0 < k <1) such that
Then the function (15.5) corresponding to this value of k maps the upper half-plane conformally onto a rectangle similar to the given rectangle. To obtain a mapping onto the given rectangle, we need only introduce an extra factor μ = a/K = b/K′, writing
![]()
instead of (15.5). Then (15.15) maps the upper half-plane onto the rectangle with vertices
![]()
and hence onto any given rectangle, provided the parameters k and π are suitably chosen.
Problem 1 (M1, Sec. 55). Let
![]()
where P(z) is an arbitrary polynomial of degree N, with zeros a1…, am of orders α1…, αm, respectively, where α1 +…+ αm = N. Prove that
a) No point of the finite plane other than a zero of P(z) can be a branch point of f(z);
b) Every zero ak of P(z) whose order is not a multiple of n is a branch point of f(z) [of what order?];
c) If γ is a closed Jordan curve whose interior contains a set of zeros ak1,…, akq (q ≤ m) of P(z) such that αk1 +…+ αkq is a multiple of n and whose exterior contains all the other zeros, then a circuit around γ does not change the value of f(z).
Problem 2. Specialize formula (15.11) to the case of a square.
73. THE SCHWARZ-CHRISTOFFEL TRANSFORMATION
The mapping (15.5) studied in the preceding section is a special case of a more general mapping known as the Schwarz-Christoffel transformation, defined by the integral
![]()
Here C is a positive constant, al…, an are distinct real numbers (assumed to be arranged in increasing order a1 <…< an), and the exponents α1 – 1,…, αn – 1 are also real but not necessarily distinct. For example,(15.12) reduces to the elliptic integral (15.5) if we make the following choice of constants

To guarantee convergence of the integral (15.12), we require that
![]()
and
![]()
where(15.14) stems from the fact that the integrand
![]()
behaves like ![]() for large t.
for large t.
Of the various single-valued analytic branches of the function β(t) which can be defined in the upper half-plane, we now choose the branch such that the argument of every factor (t – a1)α1–1,…, (t – an)αn–1 equals π when all the differences t – al,…, t – an are negative, i.e., when t belongs to the interval (– ∞, a1). This corresponds to choosing the value
![]()
for the argument of β(t) when t ∈(–∞, a1).8 Then in the other intervals (al a2),…, (an–1, an), (an, + ∞), we assign Arg β(t) values which are consistent with this choice, noting that the only factor in (15.15) whose argument changes when we go from the interval (ak–1, ak) to the interval (ak, ak+1) is t – ak, giving rise to a change of – π in Arg (t – ak) and a change of –(α k – l)π in Arg β(t) itself (cf. footnote 7, p. 329). Since Arg β(t) has the value (15.16) in the interval (–∞, a1), it has the value (α2 – 1)π +…+ (αn – 1)π in the interval (al, a2), the value (α3 – 1)π +…+ (αn– l)π in the interval (a2, a3), and so on. In general, we have
![]()
where k = 2,…, n. Finally, to the right of all the points a1,…, an, i.e., in the interval (an, + ∞), Arg β(t) has the value 0.9
Setting

we find that (15.12) can be written in the form

The last term on the right has the same argument for all z ∈ (ak–1, ak), but its absolute value increases continuously from 0 to
![]()
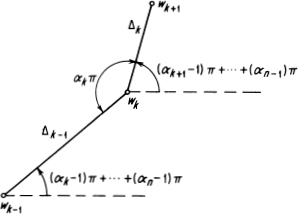
as z = x increases from ak–1 to ak. Therefore, as z traverses the interval (ak–1, ak) from left to right, the image point w = f(z) traverses the line segment Δk–1 of length lk, with initial point wk–1 and final point wk, making an angle of (αk – 1)π +…+ (αn – l)π radians with the positive real axis. This applies equally well to the line segment Δ0, with initial point
![]()
and final point wl and the line segment Δn, with initial point wn and final point wn+1 = w0. It follows that the function (15.12) maps the real axis onto a closed polygonal curve ![]() with segments Δ0, Δl…, Δn and vertices w0, wl,…, wn, wn+1 = w0. It cannot be asserted that this mapping is one-to-one, since the polygonal curve may have self-intersections, i.e., the segments Δk may have points in common other than the common end points of consecutive segments. However, if we make the additional assumption that there are no self-intersections [as, for example, in the case of the elliptic integral (15.5)], then A will be a closed rectifiable Jordan curve, bounding a polygon with vertices w0, wl,…, wn. Therefore, in this case, we can apply Theorem 15.6, concluding that the Schwarz-Christoffel transformation (15.12) is one-to-one in the upper half-plane, which it maps conformally onto the indicated polygon.
with segments Δ0, Δl…, Δn and vertices w0, wl,…, wn, wn+1 = w0. It cannot be asserted that this mapping is one-to-one, since the polygonal curve may have self-intersections, i.e., the segments Δk may have points in common other than the common end points of consecutive segments. However, if we make the additional assumption that there are no self-intersections [as, for example, in the case of the elliptic integral (15.5)], then A will be a closed rectifiable Jordan curve, bounding a polygon with vertices w0, wl,…, wn. Therefore, in this case, we can apply Theorem 15.6, concluding that the Schwarz-Christoffel transformation (15.12) is one-to-one in the upper half-plane, which it maps conformally onto the indicated polygon.
According to the construction shown in Figure 15.1, the interior angle of the polygon at the vertex wk(0 < k < n + 1) equals αkπ. Although all the angles in the figure are only defined to within integral multiples of 2π, it is easy to see that αkπ gives the interior angle without any correction term, i.e., that the inequality αk < 2 holds as well as the inequality αk > 0 assumed in (15.13). In fact, we can write

FIGURE15.1
where the expression in brackets is analytic and nonvanishing in a neighborhood of the point ak, and hence has a power series expansion of the form
![]()
which converges uniformly in a neighborhood of ak. But then
which implies
![]()
Therefore
![]()
where we use the fact that C > 0, αk > 0. Thus, as θ varies from 0 to π along an “arbitrarily small” semicircle with center ak, the image point w = f(z) varies continuously along some Jordan curve joining a point on the segment Δk to a point on the segment Δk–1, always staying inside the interior angle with vertex at wk, while Arg w increases from Arg A0(k) to Arg A0(k) + αkπ, without winding around the point w = 0 (why?). Therefore αkπ is just the size of some interior angle of the polygon, and hence must be less than 2π In other words, instead of the condition (5.13), we have the stronger condition
![]()
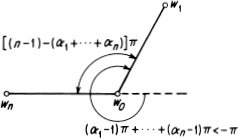
FIGURE 15.2
At the vertex w0 = wn+l, the interior angle of the polygon equals
![]()
as shown by Figure 15.2. From (15.14) we can only deduce that this quantity is positive. However, our polygon has a total of n + 1 interior angles, whose sum must equal [(n + 1) – 2]π = (n – l)π. Therefore (15.21) is precisely the size of the (n + l)st interior angle, and hence
![]()
or
![]()
In other words, instead of the condition (15.14), we have the stronger condition
![]()
The conditions (15.20) and (15.22) are necessary, but not sufficient, for the Schwarz-Christoffel transformation (15.12) to be a conformal mapping of the upper half-plane onto a bounded polygon, with vertices w0, wl,…, wn, and interior angles
![]()
In the special case where
![]()
we find that the angle with vertex w0 equals π Geometrically, this means that w0 is not really a vertex, but just an interior point of the side with vertices wn and w1 (cf. Figure 15.2). Then (15.12) maps the upper half-plane onto an n-gon rather than an (n + l)-gon. This occurs in the case of the elliptic integral (15.5), where
![]()
and in the following example:
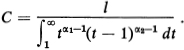
Example 1. We now use the Schwarz-Christoifel transformation to map the upper half-plane onto a triangle with angles α1π, α2π, α3π (αk > 0, α1 + α2 + α3 = 1), where the side opposite the angle α1π has length l. This problem can be solved in two ways. First we use formula (15.12) with n = 3, choosing three arbitrary real points al, a2, a3, which are mapped into the vertices of the triangle (in this approach, α1 + α2 + α3 = n – 2). Thus, for example, suppose that
![]()
Then (15.12) gives
![]()
and we need only determine the factor C > 0. But since l must equal
![]()
[cf. (15.19)], we have
![]()
Therefore (15.23) becomes

This function actually solves the problem, since it is one-to-one on the real axis, which it maps onto a triangle with the given vertex angles and side length (note that a triangle can have no self-intersections). In particular, (15.24) reduces to
if α1 = α2 = α3 = ![]() (corresponding to an equilateral triangle with side length l), and to
(corresponding to an equilateral triangle with side length l), and to
if α2 = ![]() , α1 = α3 =
, α1 = α3 = ![]() (corresponding to an isosceles right triangle with hypotenuse l).
(corresponding to an isosceles right triangle with hypotenuse l).
Example 2. Another approach to the problem of mapping the upper half-plane onto a triangle is based on the use of formula (15.12) with n = 2. This time we choose two arbitrary real points a1 and a2, which are to be mapped into two vertices of the triangle, with angles α1π and α2π. Since α1 – α2 cannot equal n – 2 = 0, the point at infinity must go into the third vertex of the triangle, with angle
![]()
Thus, for example, suppose that
![]()
Then (15.12) gives
![]()
and to determine C we have the equation
![]()
which implies
It follows that

which obviously differs from (15.24). In particular, in the case of an equilateral triangle with side l, (15.25) reduces to

Example 3. In the general case, the upper half-plane is to be mapped onto an n-gon (n ≥ 4) with interior angles α1π,…, αnπ and side lengths l1,…, ln, where as in Figure 15.3, we associate the angles αk–1π and αkπ with the side lk (k = 2,…, n), and the angles αnπ and α1π with the side l1. Suppose we choose three arbitrary points al, a2 and a3 of the real axis, which are to go into the vertices wl w2 and w3, with angles α1π, α2π and α3π. Then we must still determine n – 3 points a4,…, an of the real axis, as well as the constant C > 0, which makes n – 2 unknowns n all. At first glance, it appears that there are too many equations available for determining these unknowns, i.e., the n equations expressing the side lengths in terms of appropriate integrals. However, it is immediately apparent from Figure 15.3 that once the angles of n-gon are known, then specifying just n – 2 sides ll,…, ln–2 uniquely determines the remaining two sides ln–1 and ln10. In other words, there are actually only n – 2 independent equations of the form
![]()
for determining the n – 2 unknowns a4,…, an, C, and these equations can actually be solved. This follows from the fact (not proved here) that apart from a trivial translation and rotation, (15.14) is the most general form of a function mapping the upper half-plane onto an n-gon (see M3, Sec. 47).
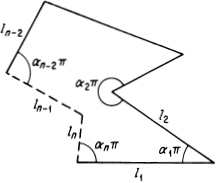
FIGURE 15.3
Problem 1. Justify the arbitrariness in the choice of al, a2, and a3 in Example 3. Can more points a4,…, an be chosen arbitrarily?
Problem 2. Map the upper half-plane Im z > 0 onto a rhombus with side length l and obtuse angle απ.
Problem 3. Derive the formula for mapping the unit disk |z| < 1 onto the interior of a polygon.
Hint. Make a preliminary Mobius transformation mapping the upper half-plane onto the unit disk.
Problem 4. Show that the function
![]()
maps the unit disk onto a square. What is the side length of this square?
Problem 5. Prove that the function
![]()
maps the unit disk onto a regular n-gon. What is the side length of this n-gon?
Problem 6. Onto what domain is the unit disk mapped by the function
![]()
where
![]()
Hint. The domain is starlike (see Sec. 37, Prob. 5).
1 The case of domains in the extended plane (see Sec. 12, Prob. 9) is considered in Probs. 2 and 3.
2 Thus G is a domain of univalence for w = ez as defined on p. 73. (A one-to-one analytic function is often called a univalent function.)
3 The proof of Theorem 15.3 is beyond the scope of this book, but can be found in the more advanced literature on complex analysis (see M3, Sec. 2).
4 This fact, which is easily verified in the simplest cases (e.g., where γ is a circle or a polygon), can be proved in complete generality. See e.g., P. S. Aleksandrov, op. cit., Chap. 2.
5 We omit the proof of Theorem 15.6 which is a straightforward but rather tedious deduction from the argument principle. The interested reader can prove it by specializing the considerations given in M2, pp. 120–123.
6 This is in keeping with what we mean by ![]() when a > 0, i.e., the positive square root.
when a > 0, i.e., the positive square root.
7 This is easily seen by drawing a small semicircle in the upper half-plane with center t = 1, and examining the behavior of Arg g(t) as t traverses the semicircle going from left to right.
8 In (15.16), (15.17), etc., an extra term + 2kπ (k = 0, ±1, ±2,…) is always understood, since Arg z is only defined to within an integral multiple of 2π.
9 Formula (15.17) also holds in the intervals (– ∞, a1) and (an, + ∞), if we introduce extra constants a0 = – ∞, an + 1 = + ∞ and let k range from 1 to n + 1, regarding the right-hand side as zero if k = n + 1. Similarly, in (15.18), we allow the upper limit of integration to be any of the points –∞ = a0, a1,…, an, an+1 = + ∞. It should be noted that w0 = wn+1 (why?).
10 Obviously, specifying n – 1 angles of an n-gon uniquely determines the remaining angle.