4.1 Variational Approaches of Projected-Entangled Pair State

![$$\displaystyle \begin{aligned} \begin{array}{rcl} E = \frac{P^{[i]\dagger} \hat{H}^{eff} P^{[i]}}{P^{[i]\dagger} \hat{N}^{eff} P^{[i]}}. {} \end{array} \end{aligned} $$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_Equ2.png)
 is an “effective” Hamiltonian by computing
is an “effective” Hamiltonian by computing  but after taking P
[i]† in 〈ψ| and P
[i] in |ψ〉 out. Figure 4.1 depicts
but after taking P
[i]† in 〈ψ| and P
[i] in |ψ〉 out. Figure 4.1 depicts  where
where  is written as an infinite PEPO
(iPEPO
, also see Sect. 2.2.6 for PEPO) for a better illustration. Similarly,
is written as an infinite PEPO
(iPEPO
, also see Sect. 2.2.6 for PEPO) for a better illustration. Similarly,  is defined by computing 〈ψ|ψ〉 but after taking P
[i]† and P
[i] out.
is defined by computing 〈ψ|ψ〉 but after taking P
[i]† and P
[i] out.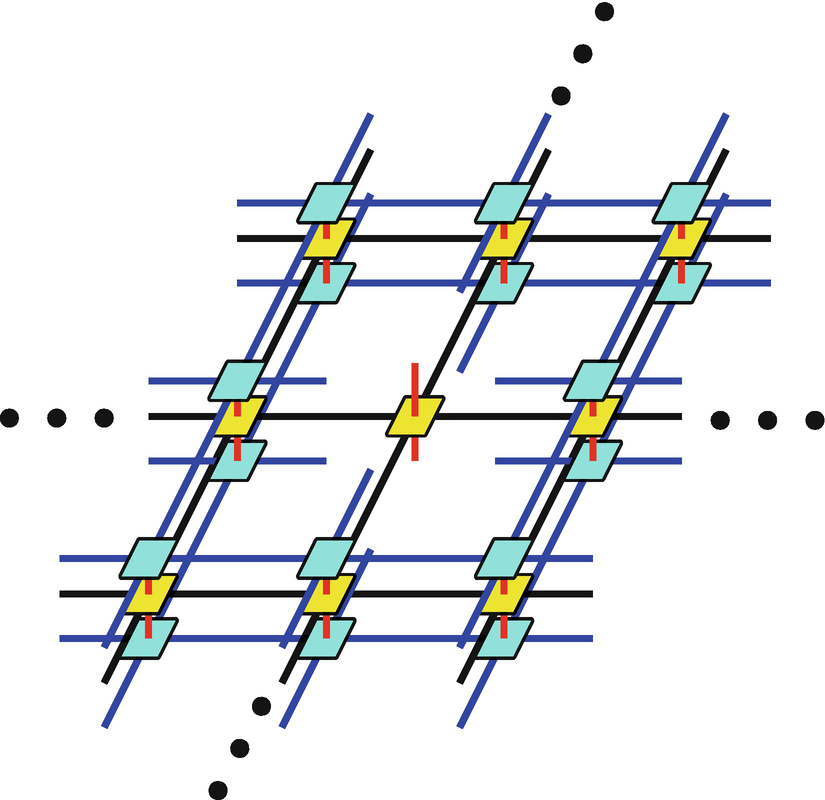
The illustration of  in Eq. (4.2)
in Eq. (4.2)
 and
and  are in fact to contract the corresponding 2D TN’s where the 2D TN
contraction algorithms are needed. In [2], Corboz used CTMRG
(see [3] or Sect. 3.3) to compute the contractions. In [4], Vanderstraeten et al. further developed this idea to a gradient method, where the gradient is calculated by implementing similar 2D TN contractions. The gradient is given as
are in fact to contract the corresponding 2D TN’s where the 2D TN
contraction algorithms are needed. In [2], Corboz used CTMRG
(see [3] or Sect. 3.3) to compute the contractions. In [4], Vanderstraeten et al. further developed this idea to a gradient method, where the gradient is calculated by implementing similar 2D TN contractions. The gradient is given as ![$$\displaystyle \begin{aligned} \begin{array}{rcl} \frac{\partial E}{\partial P^{[i]\dag}} = \frac{\partial \langle \psi | \hat{H} | \psi \rangle / \langle \psi | \psi \rangle}{\partial P^{[i]\dag}} = 2 \frac{\partial_{P^{[i]\dag}} \langle \psi | \hat{H} | \psi \rangle}{\langle \psi | \psi \rangle} - 2 \frac{\langle \psi | \hat{H} | \psi \rangle}{\langle \psi | \psi \rangle^2} \partial_{P^{[i]\dag}} \langle \psi | \psi \rangle. {} \end{array} \end{aligned} $$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_Equa.png)
 , the gradient is simplified as
, the gradient is simplified as ![$$\displaystyle \begin{aligned} \frac{\partial E}{\partial P^{[i]\dag}} = 2 \partial_{P^{[i]\dag}} \langle \psi | \hat{H} | \psi \rangle. {} \end{aligned} $$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_Equ3.png)
 after taking P
[i]† out.
after taking P
[i]† out.The gradient method is consistent with the effective Hamiltonian schemes. In fact, one has ![$$\frac {\partial E}{\partial P^{[i]\dag }} = 2\hat {H}^{eff} P^{[i]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq11.png) . At the minimal point, the gradient should vanish
. At the minimal point, the gradient should vanish ![$$\frac {\partial E}{\partial P^{[i]\dag }} = 0$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq12.png) . It means
. It means ![$$2\hat {H}^{eff} P^{[i]} = 0$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq13.png) , i.e., P
[i] is the dominant eigenstate of
, i.e., P
[i] is the dominant eigenstate of  with a zero eigenvalue. Considering the ground-state energy is shifted to zero, P
[i] is the ground state of the effective Hamiltonian
with a zero eigenvalue. Considering the ground-state energy is shifted to zero, P
[i] is the ground state of the effective Hamiltonian  .
.
Note that the infinite PEPO (iPEPO)
representation is not enforced to define  . In fact, it is not easy to obtain the iPEPO of an arbitrary 2D (or 3D) Hamiltonian. The usual way is to start from the summation form of the Hamiltonian
. In fact, it is not easy to obtain the iPEPO of an arbitrary 2D (or 3D) Hamiltonian. The usual way is to start from the summation form of the Hamiltonian  , and compute the contribution to
, and compute the contribution to  from each
from each  separately [2]. Each term is computed by contracting a 2D TN, where one can reuse the results to improve the efficiency.
separately [2]. Each term is computed by contracting a 2D TN, where one can reuse the results to improve the efficiency.



 with different configurations. The computation of
with different configurations. The computation of  is relatively easy since |S〉 and |S′〉 are just two product states. The computation of W(S) is more tricky. When |ψ〉 is a PEPS on a square lattice, W(S) is a 2D scalar TN
by fixing all the physical indexes of the PEPS
as
is relatively easy since |S〉 and |S′〉 are just two product states. The computation of W(S) is more tricky. When |ψ〉 is a PEPS on a square lattice, W(S) is a 2D scalar TN
by fixing all the physical indexes of the PEPS
as ![$$\displaystyle \begin{aligned} \begin{array}{rcl} W(S) = \text{tTr} \prod_{n} P^{[n]}_{s_n}, {} \end{array} \end{aligned} $$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_Equ7.png)
![$$P^{[n]}_{s_n}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq22.png) is a fourth-order tensor that only has the geometrical index.1 The n-th physical index is taken as s
n. Considering that most of the configurations are not translationally invariant, such QMC-TN
methods are usually applied to finite-size models. One may use the finite TN version of the algorithms reviewed in Sect. 3.
is a fourth-order tensor that only has the geometrical index.1 The n-th physical index is taken as s
n. Considering that most of the configurations are not translationally invariant, such QMC-TN
methods are usually applied to finite-size models. One may use the finite TN version of the algorithms reviewed in Sect. 3.4.2 Imaginary-Time Evolution Methods
Another way to compute the ground-state iPEPS is to do imaginary-time evolution, analog to the MPS methods presented in Sect. 3.1.3. For a d-dimensional quantum model, its ground-state simulation can be considered as computing the contraction of a (d + 1)-dimensional TN.
The evolution of a PEPS can be mapped to the contraction of a 3D TN
![$$\hat {H}_{e,e} = \sum _{\text{even i,j}} \hat {H}^{[i,j;i,j+1]} + \hat {H}^{[i.j;i+1,j]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq23.png) ,
, ![$$\hat {H}_{o,o} = \sum _{\text{odd i,j}} \hat {H}^{[i,j;i,j+1]} + \hat {H}^{[i.j;i+1,j]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq24.png) ,
, ![$$\hat {H}_{e,o} = \sum _{\text{even i, odd j}} \hat {H}^{[i,j;i,j+1]} + \hat {H}^{[i.j;i+1,j]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq25.png) , and
, and ![$$H_{o,e} = \sum _{\text{odd i, even j}} \hat {H}^{[i,j;i,j+1]} + \hat {H}^{[i.j;i+1,j]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq26.png) . One can see that each two terms in one group commute to each other. The evolution operator for an infinitesimal imaginary-time step (τ → 0) then can be written as
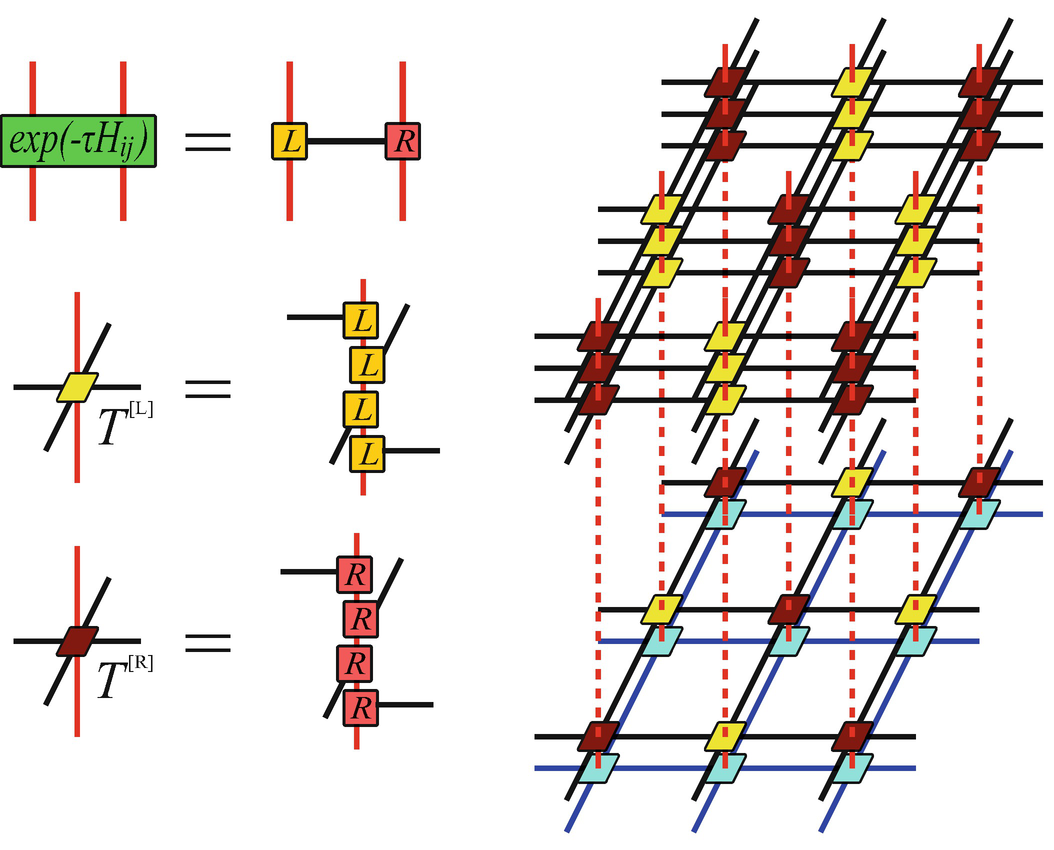
. One can see that each two terms in one group commute to each other. The evolution operator for an infinitesimal imaginary-time step (τ → 0) then can be written as ![$$\displaystyle \begin{aligned} \begin{array}{rcl} \hat{U} &\displaystyle =&\displaystyle \exp(-\tau \hat{H}) \\ &\displaystyle =&\displaystyle \exp\left(-\tau \hat{H}^{[e,e]}\right) \exp\left(-\tau \hat{H}^{[o,o]}\right) \exp\left(-\tau \hat{H}^{[e,o]}\right) \exp\left(-\tau \hat{H}^{[o,e]}\right) + O\left(\tau^2\right). {} \end{array} \end{aligned} $$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_Equ8.png)
![$$\hat {H}^{[i,j]} = \hat {H}^{[two]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq27.png) . The element of two-body evolution operator is a fourth-order tensor
. The element of two-body evolution operator is a fourth-order tensor ![$$U_{s_is_js_i^{\prime }s_j^{\prime }} = \langle s_i^{\prime }s_j^{\prime }| \exp (-\tau \hat {H}^{[two]}) |s_is_j \rangle $$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq28.png) . Implement SVD
or QR
decomposition on U (4.2) as
. Implement SVD
or QR
decomposition on U (4.2) as 
 is obtained as
is obtained as ![$$\displaystyle \begin{aligned} \begin{array}{rcl} \begin{aligned} T^{[L]}_{ss', a_1a_2a_3a_4} = \sum_{s_1s_2s_3} L_{ss_1,a_1} L_{s_1s_2,a_2} L_{s_2s_3, a_3} L_{s_3s',a_4}, \\ T^{[R]}_{ss', a_1a_2a_3a_4} = \sum_{s_1s_2s_3} R_{ss_1,a_1} R_{s_1s_2,a_2} R_{s_2s_3, a_3} R_{s_3s',a_4}. {} \end{aligned} \end{array} \end{aligned} $$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_Equ10.png)
![$$\hat {H}^{[e,e]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq30.png) ,
, ![$$\hat {H}^{[o,o]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq31.png) ,
, ![$$\hat {H}^{[e,o]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq32.png) , and
, and ![$$\hat {H}^{[o,e]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq33.png) in Eq. (4.9), respectively (see the left part of Fig. 4.2).
in Eq. (4.9), respectively (see the left part of Fig. 4.2).While the TN for the imaginary-time evolution with the iPEPO is a cubic TN , one may directly use the tensor U, which also gives a 3D but not cubic TN. Without losing generality, we in the following will use the iPEPO to present the algorithms for contraction a cubic TN. The algorithm can be readily applied to deal with the statistic models on cubic lattice or other problems that can be written as the contraction of a cubic TN.
 is to contract the iPEPO (one layer of the tensors) to the iPEPS
. In accordance to the translational invariance of the iPEPO, the iPEPS is also formed by two inequivalent tensors (denoted by P
[L] and P
[R]). Locally, the tensors in the evolved iPEPS are given as
is to contract the iPEPO (one layer of the tensors) to the iPEPS
. In accordance to the translational invariance of the iPEPO, the iPEPS is also formed by two inequivalent tensors (denoted by P
[L] and P
[R]). Locally, the tensors in the evolved iPEPS are given as ![$$\displaystyle \begin{aligned} \begin{array}{rcl} \tilde{P}^{[L]}_{s, \tilde{\alpha}_1\tilde{\alpha}_2\tilde{\alpha}_3\tilde{\alpha}_4} = \sum_{s'} T^{[L]}_{ss', a_1a_2a_3a_4} P^{[L]}_{s', \alpha_1\alpha_2\alpha_3\alpha_4}, \end{array} \end{aligned} $$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_Equ11.png)
![$$\displaystyle \begin{aligned} \begin{array}{rcl} \tilde{P}^{[R]}_{s, \tilde{\alpha}_1\tilde{\alpha}_2\tilde{\alpha}_3\tilde{\alpha}_4} = \sum_{s'} T^{[R]}_{ss', a_1a_2a_3a_4} P^{[R]}_{s', \alpha_1\alpha_2\alpha_3\alpha_4}, \end{array} \end{aligned} $$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_Equ12.png)
 (x = 1, 2, 3, 4). Obviously, the bond dimensions of the new tensors are increased by
(x = 1, 2, 3, 4). Obviously, the bond dimensions of the new tensors are increased by  times. It is necessary to preset a dimension cut-off χ: when the bond dimensions become larger than χ, approximations will be introduced to reduce the dimensions back to χ. One then can iterate the evolution of the iPEPS with bounded computational cost. After the iPEPS converges, it is considered that the ground state is reached. Therefore, one key step in the imaginary-time schemes (as well as the similar contraction schemes of 3D TN’s
) is to find the optimal truncations of the enlarged bonds. In the following, we will concentrate on the truncation of bond dimensions, and present three kinds of scheme known as full, simple, and cluster updates according to which environment the truncations are optimized [10].2
times. It is necessary to preset a dimension cut-off χ: when the bond dimensions become larger than χ, approximations will be introduced to reduce the dimensions back to χ. One then can iterate the evolution of the iPEPS with bounded computational cost. After the iPEPS converges, it is considered that the ground state is reached. Therefore, one key step in the imaginary-time schemes (as well as the similar contraction schemes of 3D TN’s
) is to find the optimal truncations of the enlarged bonds. In the following, we will concentrate on the truncation of bond dimensions, and present three kinds of scheme known as full, simple, and cluster updates according to which environment the truncations are optimized [10].24.3 Full, Simple, and Cluster Update Schemes


 is in fact a scalar TN
.
is in fact a scalar TN
.![$$\tilde {P}^{[L]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq38.png) and
and ![$$\tilde {P}^{[R]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq39.png) to denote the tensors with enlarged bond dimensions. Below, we follow Ref. [13] to explain the truncation process. To truncate the fourth bond
to denote the tensors with enlarged bond dimensions. Below, we follow Ref. [13] to explain the truncation process. To truncate the fourth bond  of the tensor, for example, one firstly defines the tensor M by contracting a pair of
of the tensor, for example, one firstly defines the tensor M by contracting a pair of ![$$\tilde {P}^{[L]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq41.png) and
and ![$$\tilde {P}^{[R]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq42.png) as
as ![$$\displaystyle \begin{aligned} M_{s_1\tilde{\alpha}_1 \tilde{\alpha}_2 \tilde{\alpha}_3, s_2 \tilde{\alpha}_1^{\prime} \tilde{\alpha}_2^{\prime} \tilde{\alpha}_3^{\prime}} = \sum_{\tilde{\alpha}_4} \tilde{P}^{[L]}_{s_1, \tilde{\alpha}_1 \tilde{\alpha}_2 \tilde{\alpha}_3 \tilde{\alpha}_4} \tilde{P}^{[R]}_{s_2, \tilde{\alpha}_1^{\prime} \tilde{\alpha}_2^{\prime} \tilde{\alpha}_3^{\prime} \tilde{\alpha}_4}. \end{aligned} $$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_Equ15.png)
 that is to be truncated. Compute the environment tensorM
e by contracting the TN of
that is to be truncated. Compute the environment tensorM
e by contracting the TN of  after taking a pair of
after taking a pair of ![$$\tilde {P}^{[L]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq45.png) and
and ![$$\tilde {P}^{[R]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq46.png) out from the TN.
out from the TN.  is in fact an eighth-order tensor of the same dimensions as M. Decompose M
e by SVD as
is in fact an eighth-order tensor of the same dimensions as M. Decompose M
e by SVD as ![$$\displaystyle \begin{aligned} M^e_{s_1\tilde{\alpha}_1 \tilde{\alpha}_2 \tilde{\alpha}_3, s_2 \tilde{\alpha}_1^{\prime} \tilde{\alpha}_2^{\prime} \tilde{\alpha}_3^{\prime}} = \sum_{\alpha} V^{[L]}_{s_1 \tilde{\alpha}_1 \tilde{\alpha}_2 \tilde{\alpha}_3, \alpha} \varLambda_{\alpha} V^{[R]}_{s_2 \tilde{\alpha}_1^{\prime} \tilde{\alpha}_2^{\prime} \tilde{\alpha}_3^{\prime}, \alpha}. {} \end{aligned} $$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_Equ16.png)
![$$\tilde {M} = \varLambda ^{1/2} V^{[R]} M V^{[L]} \varLambda ^{1/2}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq48.png) and decompose it by SVD as
and decompose it by SVD as ![$$\tilde {M} \simeq \tilde {V}^{[L]} \tilde {\varLambda } \tilde {V}^{[R]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq49.png) by taking only the χ-largest singular values and singular vectors. Finally, two tensors are updated by
by taking only the χ-largest singular values and singular vectors. Finally, two tensors are updated by ![$$P^{[L]} = \tilde {\varLambda }^{1/2} \tilde {V}^{[L]T} \varLambda ^{-1/2} V^{[R]T}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq50.png) and
and ![$$P^{[R]} = \tilde {\varLambda }^{1/2} \tilde {V}^{[R]} \varLambda ^{-1/2} V^{[L]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq51.png) . One can check
. One can check ![$$\displaystyle \begin{aligned} M_{s_1\tilde{\alpha}_1 \tilde{\alpha}_2 \tilde{\alpha}_3, s_2 \tilde{\alpha}_1^{\prime} \tilde{\alpha}_2^{\prime} \tilde{\alpha}_3^{\prime}} \simeq \sum_{\alpha_4} P^{[L]}_{s_1, \tilde{\alpha}_1 \tilde{\alpha}_2 \tilde{\alpha}_3 \alpha_4} P^{[R]}_{s_2, \tilde{\alpha}_1^{\prime} \tilde{\alpha}_2^{\prime} \tilde{\alpha}_3^{\prime} \alpha_4}, {} \end{aligned} $$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_Equ17.png)
 . We shall stress that Eq. (4.17) is not the SVD
of M; the decomposition and truncation are optimized by the SVD of M
e, hence is a non-local optimization.
. We shall stress that Eq. (4.17) is not the SVD
of M; the decomposition and truncation are optimized by the SVD of M
e, hence is a non-local optimization.With the formula given above, the task is to compute the environment tensor M e by the contraction algorithms of 2D TN’s . In Ref. [13], the authors developed the SRG , where M e is computed by a modified version of TRG algorithm [17]. Other options include iTEBD [15], CTMRG [12], etc. Note that how to define the environment as well as how to truncate by the environment may have subtle differences in different works. The spirit is the same, which is to minimize the fidelity in Eq. (4.14) referring to the whole iPEPS .
A much more efficient way known as the simple update was proposed by Jiang et al. [18]; it uses local environment to determine the truncations, providing an extremely efficient algorithm to simulate the 2D ground states. As shown in Fig. 2.8c, the iPEPS
used in the simple update is formed by the tensors on the site and the spectra on the bonds: two tensors P
[L] and P
[R] located on the two sub-lattices, and λ
[1], λ
[2], λ
[3], and λ
[4] on the four inequivalent geometrical bonds of each tensor. The evolution of the tensors in such an iPEPS is given by Eq. (4.10). λ
[i] should be simultaneously evolved as ![$$\tilde {\lambda }^{[i]}_{(a_i, \alpha _i)} = I_{a_i} \lambda _{\alpha _i}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq53.png) with
with  .
.
![$$\displaystyle \begin{aligned} M_{s_1\tilde{\alpha}_1 \tilde{\alpha}_2 \tilde{\alpha}_3, s_2 \tilde{\alpha}_1^{\prime} \tilde{\alpha}_2^{\prime} \tilde{\alpha}_3^{\prime}} = \sum_{\tilde{\alpha}_4} \tilde{P}^{[L]}_{s_1, \tilde{\alpha}_1 \tilde{\alpha}_2 \tilde{\alpha}_3 \tilde{\alpha}_4} \tilde{P}^{[R]}_{s_2, \tilde{\alpha}_1^{\prime} \tilde{\alpha}_2^{\prime} \tilde{\alpha}_3^{\prime} \tilde{\alpha}_4} \tilde{\lambda}^{[1]}_{\tilde{\alpha}_1} \tilde{\lambda}^{[2]}_{\tilde{\alpha}_2} \tilde{\lambda}^{[3]}_{\tilde{\alpha}_3} \tilde{\lambda}^{[1]\prime}_{\tilde{\alpha}_1^{\prime}} \tilde{\lambda}^{[2]\prime}_{\tilde{\alpha}_2} \tilde{\lambda}^{[3]\prime}_{\tilde{\alpha}_3} \tilde{\lambda}^{[4]}_{\tilde{\alpha}_4}. \end{aligned} $$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_Equ18.png)
![$$\displaystyle \begin{aligned} M_{s_1\tilde{\alpha}_1 \tilde{\alpha}_2 \tilde{\alpha}_3, s_2 \tilde{\alpha}_1^{\prime} \tilde{\alpha}_2^{\prime} \tilde{\alpha}_3^{\prime}} \simeq \sum_{\alpha=1}^{\chi} U^{[L]}_{s_1 \tilde{\alpha}_1 \tilde{\alpha}_2 \tilde{\alpha}_3, \alpha} \lambda_{\alpha} U^{[R]}_{s_2 \tilde{\alpha}_1^{\prime} \tilde{\alpha}_2^{\prime} \tilde{\alpha}_3^{\prime}, \alpha}, \end{aligned} $$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_Equ19.png)
![$$\displaystyle \begin{aligned} \begin{aligned} P^{[L]}_{s_1, \tilde{\alpha}_1 \tilde{\alpha}_2 \tilde{\alpha}_3 \alpha} = U^{[L]}_{s_1 \tilde{\alpha}_1 \tilde{\alpha}_2 \tilde{\alpha}_3, \alpha} \left(\tilde{\lambda}^{[1]}_{\tilde{\alpha}_1}\right)^{-1} \left(\tilde{\lambda}^{[2]}_{\tilde{\alpha}_2}\right)^{-1} \left(\tilde{\lambda}^{[3]}_{\tilde{\alpha}_3}\right)^{-1}, \\ P^{[R]}_{s_2, \tilde{\alpha}_1 \tilde{\alpha}_2 \tilde{\alpha}_3 \alpha} = U^{[R]}_{s_2 \tilde{\alpha}_1 \tilde{\alpha}_2 \tilde{\alpha}_3, \alpha} \left(\tilde{\lambda}^{[1]}_{\tilde{\alpha}_1}\right)^{-1} \left(\tilde{\lambda}^{[2]}_{\tilde{\alpha}_2}\right)^{-1} \left(\tilde{\lambda}^{[3]}_{\tilde{\alpha}_3}\right)^{-1}. \end{aligned} \end{aligned} $$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_Equ20.png)
 is updated by λ in the SVD.
is updated by λ in the SVD.The above procedure truncates  to the dimension cut-off χ, which can be readily applied to truncate any other bonds. According to the discussion about SVD in Sect. 2.2.1, the environment is the two tensors and the adjacent spectra λs in M, where the λs play the role of an “effective” environment that approximate the true environment (M
e in the full update). From this viewpoint, the simple update uses local environment. Later by borrowing from the idea of the orthogonal form of the iPEPS on Bethe lattices [19–26], it was realized that the environment of the simple update is the iPEPS on the infinite trees [27–29], not just several tensors. We will talk about this in detail in the next chapter from the perspective of the multi-linear algebra.
to the dimension cut-off χ, which can be readily applied to truncate any other bonds. According to the discussion about SVD in Sect. 2.2.1, the environment is the two tensors and the adjacent spectra λs in M, where the λs play the role of an “effective” environment that approximate the true environment (M
e in the full update). From this viewpoint, the simple update uses local environment. Later by borrowing from the idea of the orthogonal form of the iPEPS on Bethe lattices [19–26], it was realized that the environment of the simple update is the iPEPS on the infinite trees [27–29], not just several tensors. We will talk about this in detail in the next chapter from the perspective of the multi-linear algebra.
By keeping the same dimension cut-off, the simple update is much more efficient than the full update. On the other hand, obviously, the full update possesses higher accuracy than the simple update by considering better the environment. The cluster update is between the simple and full updates, which is more flexible to balance between the efficiency and accuracy [10, 27, 30].
One way is to choose a finite cluster of the infinite TN
and define the environment tensor by contracting the finite TN after taking a pair of ![$$\tilde {P}^{[L]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq57.png) and
and ![$$\tilde {P}^{[R]}$$](../images/489509_1_En_4_Chapter/489509_1_En_4_Chapter_TeX_IEq58.png) out. One can consider to firstly use the simple update to obtain the spectra and put them on the boundary of the cluster [30]. This is equivalent to using a new boundary condition [27, 29], different from the open or periodic boundary conditions of a finite cluster. Surely, the bigger the cluster becomes, more accurate but more consuming the computation will be. One may also consider an infinite-size cluster, which is formed by a certain number of rows of the tensors in the TN [10]. Again, both the accuracy and computational cost will in general increase with the number of rows. With infinite rows, such a cluster update naturally becomes the full update. Despite the progresses, there are still many open questions, for example, how to best balance the efficiency and accuracy in the cluster update.
out. One can consider to firstly use the simple update to obtain the spectra and put them on the boundary of the cluster [30]. This is equivalent to using a new boundary condition [27, 29], different from the open or periodic boundary conditions of a finite cluster. Surely, the bigger the cluster becomes, more accurate but more consuming the computation will be. One may also consider an infinite-size cluster, which is formed by a certain number of rows of the tensors in the TN [10]. Again, both the accuracy and computational cost will in general increase with the number of rows. With infinite rows, such a cluster update naturally becomes the full update. Despite the progresses, there are still many open questions, for example, how to best balance the efficiency and accuracy in the cluster update.
4.4 Summary of the Tensor Network Algorithms in Higher Dimensions
In this section, we mainly focused on the iPEPS algorithm that simulates the ground states of 2D lattice models. The key step is to compute the environment tensor, which is to contract the corresponding TN . For several special cases such as trees and fractal lattices, the environment tensor corresponds to an exactly contractible TN, and thus can be computed efficiently (see Sect. 2.3.6). For the regular lattices such as square lattice, the environment tensor is computed by the TN contraction algorithms, which is normally the most consuming step in the iPEPS approaches.
The key concepts and ideas, such as environment, (simple, cluster, and full) update schemes, and the use of SVD , can be similarly applied to finite-size cases [31, 32], the finite-temperature simulations [27, 28, 33–39], and real-time simulations [31, 40] in two dimensions. The computational cost of the TN approaches is quite sensitive to the spatial dimensions of the system. The simulations of 3D quantum systems are much more consuming than the 2D cases, where the task becomes to contract the 4D TN. The 4D TN contraction is extremely consuming, one may consider to generalize the simple update [29, 41], or to construct finite-size effective Hamiltonians that mimic the infinite 3D quantum models [29, 42]
Many technical details of the approaches can be flexibly modified according to the problems under consideration. For example, the iPEPO formulation is very useful when computing a 3D statistic model, which is to contract the corresponding 3D TN. As for the imaginary-time evolution, it is usually more efficient to use the two-body evolution operators (see, e.g., [12, 18]) rather than the iPEPO. The environment is not necessarily defined by the tensors; it can be defined by contracting everything of the TN except for the aimed geometrical bond [28, 33]. The contraction order also significantly affects the efficiency and accuracy. One may consider to use the “single-layer” picture [10, 31], or an “intersected” optimized contraction scheme [43].

Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.