A two-handed ‘chest pass’ is commonly used in sports such as netball and basketball. While it is accurate, the speeds attained are low relative to one-handed throws. Why is this? What techniques might we employ to increase ball speed?
By the end of this chapter you should be able to:
•Explain the distinguishing characteristics of push- and throw-like movement patterns and open and closed kinetic chain movements
•Determine whether a given sporting movement is optimised by the adoption of a push-like or throw-like pattern
•Describe how sporting performance might be improved by altering the predominant pattern of movement
In this book, we have discovered that we can use a variety of different techniques to accomplish sporting tasks in different situations, but are there more generalised movement patterns that we might refine for specific situations? As you’re already aware, human motion involves the complex coordination of individual movements about several joints at the same time. We effectively have a moving chain of body parts: the kinetic (moving) chain. There are two main categories of kinetic chain patterns: push-like and throw-like.
Push-like movement pattern
A push-like movement pattern is exactly what you would expect it to be: we move as if we are pushing something. That is, we tend to extend all the joints in our kinetic chain simultaneously in a single movement. Good examples of the use of a push-like pattern include the bench press, leg press and squat lift exercises that we perform in weight training (Figure 17.1), the basketball free-throw, a dart throw and daily tasks such as standing from a seated position.

FIG. 17.1 The leg press (left) and squat lift (right) exercises are examples of tasks accomplished using a push-like movement pattern.
The fact that this movement pattern is so common suggests that it has important benefits. The first is that, because they are acting simultaneously, the cumulative forces (or torques) generated about each joint result in a high overall force. This is why we use a push-like pattern to move things that are very heavy, such as the opposing scrum in rugby (Figure 17.2). It is a useful pattern to use even when performing actions such as standing from a seated position where relatively small forces are required (for most of us), because we can perform the movement using only a small portion of the force that we could possibly produce. In this sense, push-like movements are very efficient.
FIG. 17.2 Rugby players use a push-like pattern in order to generate enough force to push their opponents backwards in a scrum.
A second important benefit is that simultaneous joint rotations often result in a straight-line movement of the end point of the chain (i.e. the hand or foot). By moving in a straight line, we can achieve highly accurate movements. The dart throw is a good example of the adoption of a push-like pattern to give high accuracy (see Figure 17.3) and can be compared to the movement of a mechanical fist that is often used in comedy.
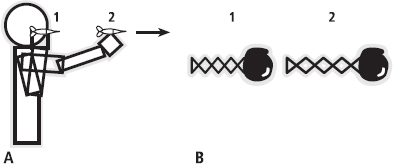
FIG. 17.3 The use of a push-like pattern, in which the joints of the kinetic chain extend simultaneously, allows the end point of the chain to travel in a straight line. The result is a high accuracy of the end point, or of a projectile such as a dart released from it (A). This principle can be compared to the extension of a comedic fist used in skits (B).
A push-like pattern can be used to improve force production and accuracy but is it ideal for a chest pass?
It needs to meet a few criteria. Such a movement pattern must be able to be used effectively in each of two subcategories of movement. First, it must be used in movements where neither end of the chain can move freely: closed kinetic chain movements. The leg press and bench press exercises are good examples in which the ends of the chain cannot move freely. In the leg press, the hip is fixed to the upper body and the feet are fixed to the footplate of the machine. Likewise, in a bench press, the shoulder is fixed to the torso and the hands are fixed to the bar. Second, the push-like pattern can also be effectively used when one end of the chain (i.e. the distal end) is completely free to move: open kinetic chain movements. Darts and basketball free throws are good examples of these. In the dart throw, for example, one end of the arm is fixed to the body (at the shoulder) but the other end (hand) is free to move, i.e. it is open. So it seems viable to use a push-like pattern to perform the chest pass. The movement pattern would allow high accuracy as well as a high force production (this is likely to help those, such as young children, who have lower strength).
There is a significant drawback to the push-like pattern: slow movement speed. Because the speed of the movement is limited by the shortening speed of our muscles, we will never accomplish very high movement speeds during a chest pass using a push-like pattern. So it fails on this second criterion.
Throw-like movement pattern
Throw-like movements differ from push-like movements in that the joints of the kinetic chain extend sequentially, one after another. The best example is the overarm throw, as shown in the stick figure in Figure 17.4. In this movement, the shoulder extends before the elbow and wrist; the shoulder actually begins to extend while the elbow is still flexing during the wind-up, or cocking, phase. Later in the throw, the extension velocity of the hand and fingers increases significantly, resulting in a high ball release velocity. The fastest throw of a sports ball ever recorded is attributed to Albertín Aroldis Chapman de la Cruz (Aroldis Chapman), who pitched a baseball at 169 km·h-1 or about 47 m·s-1!
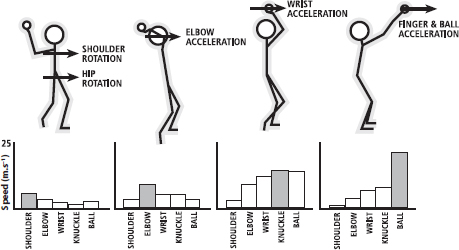
FIG. 17.4 An overarm throw is performed with a sequential movement pattern where the proximal joints increase their velocity first (left diagram) and the more distal segments increase their velocity later (right diagram). The graphs below each stick figure illustrate the changing velocities of each segment; the grey bar indicates the segment with the highest velocity.
Mechanics of the throw-like pattern
How is it that the distal segments can attain higher velocities than they do using a push-like pattern? One theory is that momentum generated in the proximal segments through the production of large muscle forces is transferred to the distal segments, much like the transfer that occurs in a fishing rod. When you cast a fishing rod, you impart an angular momentum to the rod at its base. When you then stop the rotation of the rod, the top continues to move at a very high velocity. In case you were wondering, at a sanctioned United Kingdom Surfcasting Federation event, Danny Moeskops cast a 150-gram weight ~279 m in 2004, which is probably the longest ‘officially’ recorded cast.
To understand this, we can return to the maths of Chapter 7. Remember that as you throw the rod, you give it angular momentum (H). Angular momentum is the product of moment of inertia (I) and angular velocity (ω), just as linear momentum is the product of mass and linear velocity. So, H = Iω. This angular momentum must be maintained unless another force acts to change it (remember, conservation of momentum). If we halt the proximal segments of our fishing rod or arm, the angular momentum must be transferred to the more distal segments.
Remember that the moment of inertia is a function of the mass of a body segment (m) and its radius of gyration (k) squared, where k tells us how far the mass is distributed from the joint. The greater is k, the further away it is distributed: I = mk2. So if we give our fishing rod or our arm an angular momentum we produce a given angular velocity, but more distal segments of both the rod and our arm are lighter so for the same angular momentum they would have a greater angular velocity; that is, if H = Iω, and H stays the same while I decreases, then ω must increase. Therefore, if we rotate the base of the rod or the proximal segments of the arm and then halt them, the momentum is transferred to these lighter segments and so their velocity must increase. Additionally, the distance from the axis of rotation (which was the base of the rod or the shoulder of the arm) to the effective centre of mass will be lower. It will now be the distance from the point on the rod where movement still exists (or from the joint in the arm; possibly the elbow or hand) which is still moving. Since I = mk2, a small decrease in k will significantly reduce I and therefore will increase ω substantially.
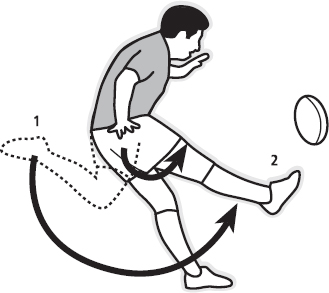
In mathematical terms, by accelerating the proximal segments of our arm and then stopping them, we get a transfer of momentum along the arm that results in a high velocity of the end point (that is, the hand). We also use this technique when we kick. Muscles around the hip accelerate the thigh segment before the leg and foot swing through later in the kick cycle, as shown in Figure 17.5. So kicking is actually a good example of the use of a throw-like pattern!
FIG. 17.5 During kicking, the thigh is accelerated (1) before the lower leg (2). This results in a high end-point (i.e. foot and ball) velocity.
Does this really explain why we develop such high speeds when we use a throw-like pattern? Probably not quite. During kicking we don’t stop the thigh swinging before the lower leg comes through (Luhtanen, 1984). When this occurs, the velocity of the foot is reduced. So the idea that momentum is transferred in this way can’t be the only explanation. A second explanation is that the throw-like pattern makes best use of the tissues that have the fastest shortening speeds: the tendons (see Box 17.1). It is true that the muscles produce the forces that move the limbs but they attach to the bones via elastic tendons. Elastic potential energy is stored in tendons when they are stretched. When the tendon is released, it recoils at a very high speed, i.e. it has a high kinetic energy. The recoil speed of elastic elements such as tendons is much higher than the shortening speed of a muscle. This is why you use an elastic sling-shot to propel rocks and other objects rather than trying to throw them!
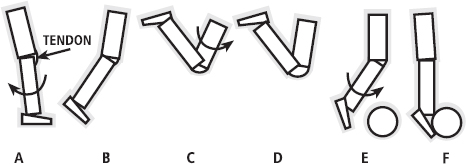
The method by which our tendons are used is quite simple. During a kick, we draw the leg backwards rapidly before we swing it forwards (see Figure 17.6; the rapid lengthening–shortening of the muscle tendon unit is often called a ‘stretch–shorten cycle’). At the start of the forward phase, the large muscles around the hip accelerate the thigh. However, the lower leg and foot have inertia; they tend to continue to move backwards. The assumption that the muscles that cross the front of the knee must be lengthening is not necessarily true. The flexion occurring at the knee is a result of the compliant knee (patellar) tendon stretching under the load. When the force in the tendon is high enough, the tendon will begin to recoil at very high speed. We simultaneously contract the muscles that extend the knee (the quadriceps (thigh) muscles) forcefully to provide extra force; the combination of these results in a very fast extension of the knee and a very high foot speed.
FIG. 17.6 A kick is initiated by first drawing the leg backwards (A–C) before swinging first at the hip (D; thigh swing) and then at the knee (E; lower leg swing) to complete the kick with a high foot speed (F). The movement from A to D stretches the knee (patellar) tendon, which then recoils to produce a high-speed movement.
BOX 17.1 MUSCLE–TENDON ELASTICITY IN HIGH-SPEED MOVEMENTS
Animal movements result from the action of muscles working on bones but the tendons that connect the two cannot be forgotten. Tendons are highly elastic, which means they store energy (elastic potential energy) when they are stretched by a force and can then recoil rapidly; elasticity refers to the ability to regain shape after deformation, in other words to retain energy even when deformed. Because limbs have inertia, the force developed by the muscles tends to stretch the tendons until the force is transferred effectively enough for the inertia of the limbs to be overcome.
In particular, the tendons of muscles in the distal regions of limbs are long and capable of storing a significant amount of elastic energy. This makes them ideal for performing energy efficient and high-speed movements; tendons, like rubber bands, can recoil at speeds significantly higher than the speed of muscle shortening. However, higher-speed muscle contractions are best for storing energy in the tendons, since their stretch is increased as the speed of muscle shortening increases. In high-speed movements, much of the limb movement occurs when the tendons are shortening rapidly but the muscles have already performed their shortening and are nearly isometric (that is, there is little length change).
A good example of this is shown in Figure 1 (data from Kurokawa et al., 2003). Because it is a high-speed movement, a vertical jump (even when there is no counter-movement, or dipping, phase) is performed using a throw-like pattern.
The jumper first extends the hip and then sequentially extends the knees and ankles. To conserve momentum, the rapid upward movement of the upper body (rotating about the hip) causes a compression (downward movement) of the legs. This compression, coupled with rapid muscle shortening, stretches the tendons of the leg. The long Achilles tendon is lengthened early in the jump phase and therefore recoils rapidly towards the end of the jump. The calf muscles shorten rapidly while the hip is extending (that is, early in the jump) and therefore only exhibit a small shortening later in the jump. Thus, the highest velocity phase of the vertical jump is performed with the tendon recoiling at high speed while the muscles are barely shortening! This high-speed movement is therefore largely accomplished by tendon recoil.
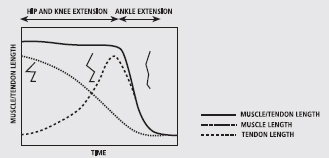
FIG. 1 During the throw-like vertical jump (without counter-movement) the Achilles tendon extends during the early phase when the hip and knee extend rapidly. Later in the movement, the tendon recoils rapidly resulting in an overall shortening of the muscle–tendon unit; at this point, the muscle has nearly completed its shortening and is contracting almost isometrically (i.e. with little length change). Redrawn after Kurokawa et al., 2003.
A similar mechanism allows the fishing rod to work spectacularly. As the base is rotated forwards, the top of the rod will tend to lag behind, because of its inertia. The rod is made of an elastic material that stores energy that is released as the rod whips forwards at high speed. The mechanism also explains why we can throw so far. The tendons that cross the wrist and fingers are very long and capable of storing a significant amount of elastic energy, so they are also very good at recoiling to allow the propulsion of objects. The flick of the wrist and fingers at the end of an overarm throw contributes a great deal to the overall release speed of a ball or other object. It is much easier for elastic materials to recoil when there is only a small load to recoil against, so the decrease in mass and radius of gyration in the distal segments of the arm and leg (or fishing rod) are still of great importance. A combination of these two mechanisms (i.e. transfer of momentum and use of elastic energy) probably explains the effectiveness of the throw-like pattern.
THE ANSWER
What does all this have to do with our chest pass? We know that we can achieve high accuracy with the push-like movement but we can’t move at high speeds. To push the ball quickly, we need to use a throw-like pattern and, particularly, use the tendons that cross the wrist and fingers. The optimum solution is to initiate the pass by stepping forwards first (to give momentum to our body), then push the shoulders forwards rapidly, simultaneous with the elbows moving outwards and forwards while the hands remain close to the chest (see Figure 17.7). This does two things: a large momentum is given to the system (that is, the upper body and arms) and there is some forward velocity, and the hands and fingers are squashed on to the ball so that their tendons are stretched rapidly while the elbows are flexed quickly so their tendons are also stretched. The second part of the throw requires a forceful extension of the elbows. In this part of the throw there is significant recoil of the tendons of the elbows, hands and fingers. It is this recoil that increases the speed of the throw.
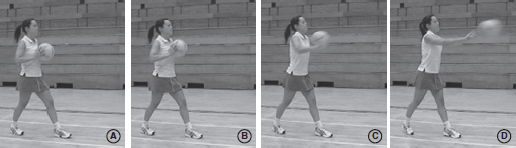
FIG. 17.7 The chest pass in netball is best accomplished by first stepping forwards (A), then pushing the shoulders and elbows forwards (B) to stretch the finger and hand muscle–tendon units (C) before finally using a rapid hand and finger extension (D) to make best use of the elastic recoil of the tendons of the distal arm. This action results in the use of a throw-like pattern in a movement typically performed with a push-like pattern.
Luckily, we have two hands producing symmetrical forward-directed movements and the ball moves in a straight line through the throw. So the thrower should still be able to attain a high accuracy. Other skills, such as using an over-arm throw to propel a ball, will be less accurate compared to those that use a push-like pattern, because the end points of the chain (the hand and ball) follow a curved path. Therefore, a small alteration in the time of release of the ball will cause a significant alteration in the direction of ball release (Figure 17.8).
FIG. 17.8 The overarm throw, starting at (1), begins with a downswing of the arm (2) before it is drawn backwards and raised to head level (3), and ultimately thrown forwards (4). The direction of release changes significantly as the point of release changes slightly (arrows). This reduces the accuracy of the overarm throw.
HOW ELSE CAN WE USE THIS INFORMATION?
This information is probably the most important in this book from a coaching perspective. For example, a shot (in the shot put) can appear heavy to one participant and light to another, depending on their strength. If the shot is relatively heavy, it would be best to adopt a push-like movement pattern in order to produce enough force to accelerate it (remember, F = ma). However, in stronger athletes, a throw-like pattern, analogous to a one-arm chest pass, could be used. So different patterns might be taught to children compared to adults or to strength-trained athletes compared to non-strength-trained individuals. Such coaching differences would also exist for other skills such as basketball shooting and passing and discus and javelin throwing (remember the kinetic chain can include rotations of the torso, which would precede accelerations of the arm).
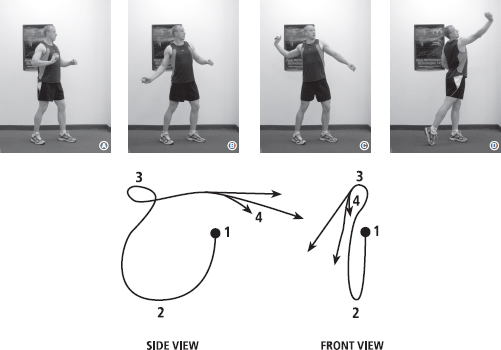
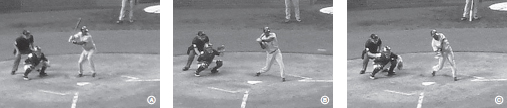
The progression in the learning of skills that require both speed and accuracy also tends to progress from push- to throw-like. For example, beginner tennis players often use a short arm jab to execute an overarm serve. The movement pattern is essentially push-like and improves the accuracy of projection of the ball. As shown in Figure 17.9, elite players use an extreme throw-like pattern to increase ball speed, while still managing exceptional accuracy. Swinging motions such as the baseball bat swing (Figure 17.10) also progress towards a throw-like pattern with learning; in this skill, the rotation of the body precedes arm swing and wrist rotation. The use of the throw-like, rather than push-like, pattern is considered to ‘unclock’ the degrees of freedom in the movement. A degree of freedom is a single method of moving a joint (or series of joints). In a rigid, closed kinetic chain or push-like pattern the possible degrees around which movements can move freely is limited, but in open kinetic chain, throw-like movements there are essentially an infinite number of degrees of freedom. This can pose a problem because we have to then choose between a large number of possible ways to complete our movement. But highly skilled individuals can use techniques with many available degrees of freedom, then adjust their movements during a skill to obtain a high level of accuracy, even if an error occurs in one part of the chain (i.e. they compensate well). If you’re interested in understanding more about this degrees of freedom problem and how we learn to make sense of it, you might start with the work of Russian neuroscientist Nikolai Bernstein and progress from there (motor control discussions are outside the scope of this chapter, but are worth exploring).

FIG. 17.9 Tennis players learn to ‘throw’ the racquet while still achieving a high level of accuracy.
FIG. 17.10 The baseball bat swing is a good example of a throw-like pattern where the kinetic chain incorporates most segments of the body; rotation of the body (A to B) precedes the rapid arm swing (C).
Of final note is that the goal of a task and therefore the muscle activation sequences required to complete a skill is highly dependent on whether the movement at a particular joint is open or closed (this is a little different from the whole limb or whole body examples we’ve been using). For example, if the knee extensors work in a closed skill, such as the leg press or standing from a chair, the whole limb (for leg press) or body (for a chair rise) will move and therefore numerous supporting muscle actions are required (this is sometimes referred to as a complex or branched kinetic chain). However, if the chain is open and the lower limb is free to move then the same knee extension work results only in the lower limb moving and the muscle activation through the rest of the limb and body (i.e. rest of the chain) can remain minimal and fulfil a supporting role only (sometimes referred to as a serial or simple chain). Because the muscle activation sequences are so different between these open and closed skills, specific ‘task practice’ is required for each. In the rehabilitation setting where simple movements (e.g. leg extension) are often practiced before complex movements (e.g. standing from a chair), an appropriate progression of task practice is required in order to fully rehabilitate the patient and ensure they can move optimally through their environment. So a single-joint open chain exercise will often be mastered before progressing to the multi-joint, closed chain (from the point of view of the knee joint) exercise.
Useful Equations
sum of moments or sum of torques (ΣM or Στ) τt = τ1 + τ2 + τ3 …
angular momentum (H or L) = Iω or mk2ω
moment of inertia (I) = Σmr2 or mk2
References
Kurokawa, S., Fukunaga, T., Nagano, A. & Fukashiro, S. (2003). ‘Interaction between fascicles and tendinous structures during counter-movement jumping investigated in vivo’. Journal of Applied Physiology, 95: 2306–14.
Luhtanen, P. (1984). ‘Development of biomechanical model of in-step kicking in football players (Finnish)’. Report of the Finnish FA. 1/1984. Helsinki, Finland.
A Review of Open and Closed Kinetic Chain Exercise Following Anterior Cruciate Ligament Reconstruction, by Anthony C. Miller, Sports Coach (http://www.brianmac.co.uk/kneeinj.htm). Interesting article showing how knowledge of the kinetic chain can support practice.
Knee Tutor, Guided learning (http://www.kneeguru.co.uk/KNEEnotes/courses/ligament-issues/cruciate-ligament-rehabilitation-course-lesley-hall-msc-mcsp). Particularly read ‘General principles of ACL rehabilitation’ for an explanation of open- and closed-kinetic chain exercises and their importance in knee rehabilitation.