2The branch structure of the Lambert W function
In the previous chapter, we mentioned several times that the Lambert function can take complex values. The equation
Before we start this study, however, it is instrumental to see everything on a simpler and more familiar function. We therefore first discover the behavior of the exp-log pair before going to see the
2.1 The exponential function
2.1.1 The mapping properties of exp
To know how the inverse of the exponential behaves, we need to see the mapping properties of exp. The exponential function is an entire function; its Taylor series
converges on the whole set ℂ to a finite value. It is also well known that
From these two facts, an important observation follows:
Picard's theorem says that a non-constant entire function can miss at most one value (see, for example, [110]). The exponential function, therefore, takes every complex number except zero. We are going to show that it takes every non-zero complex number infinitely many often.
Recall De Moivre's formula:
Therefore,
The vertical axis with abscissa s is mapped onto the circle with radius
Another proof
Recall the Great Picard Theorem: if an analytic function has an essential singularity at a point z, then in any neighborhood around z, the function takes every value with at most one exception infinitely often.
It is an immediate corollary of this theorem that a non-polynomial entire function takes every value with at most one exception infinitely many times. Indeed, if
See [35] for the proof of the Great Picard Theorem.
2.2 The definition of the logarithm
After the acquaintance with the exponential, we can introduce its inverse. We have just seen that every point on the complex plane has infinitely many pre-images:
If we want to know which z points are mapped to
The angle of w will be the imaginary part of z, but here we must be careful. Since
so the imaginary part of the pre-image z is determined only up to modulo
To proceed, we recall the argument functionarg which gives the angle of w such that it falls in the interval
It is thus seen that all those z's will constitute the pre-image of w for which
The value
Their ranges are horizontal strips of height

FIGURE 4 The range of the branches of the logarithm. The thick horizontal lines limit the ranges, and the dashed lines show the branch closure. For example, the range of the principal branch (
The sub-index k is not the base of the logarithm, but a branch index. (We will not use logarithm of base different from e, so there will be no confusion.) The logarithm with which we met in high school is the branch with
This is the only branch which takes real values. Usually, the branch which has the (preferably positive) reals in its domain, or at least “the most of it” is the principal branch. Compare this with with the principal branch W0 of the logarithm function.
2.3 Branch cuts, covering maps, and Riemann surfaces
To prepare for the analysis of the branch structure of the Lambert function, we introduce some notions which facilitate talking about mappings and their inverses.
2.3.1 The z-plane and the w-plane
When considering equations like
it is beneficial to distinguish between the z-plane and the w-plane. This makes the references easier and avoids confusion. In this case, the z-plane is the domain of exp; this plane is mapped to the w-plane by the same function. Set theoretically,
In turn, log, the inverse of exp, maps the w-plane back to the z-plane. This is shown schematically in Figure 5.
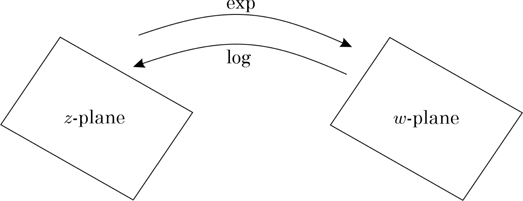
FIGURE 5 The exponential function maps the z-plane into the w-plane, the logarithm maps the latter into the former.
Thus, Figure 4 shows the z-plane, partitioned by the ranges of log. All of the individual horizontal strips are mapped by exp to the whole ℂ*, and ℂ* is mapped onto the horizontal strips by the corresponding branches of log.
2.3.2 Branch cut and branch point
It is useful to get a deeper insight into what happens with the lines limiting the horizontal strips of Figure 4 in the z-plane when mapped by exp. We saw earlier that horizontal lines are mapped into half-lines from the origin in the w-plane with angles determined by the ordinate of the line. The ordinates limiting the branches are the odd integer multiples of π by an odd integer, so these lines are all mapped onto the negative real axis. The negative axis in the w-plane has therefore a distinguished role. We have a name for it: the negative real axis is the branch cut of the logarithm; it is the set in the w-plane corresponding to the branch limiting lines in the z-plane.
If a horizontal line L in the z-plane is parametrized by
The limiting point, when
Let us consider a circle going around the origin in the w-plane, as shown in Figure 6. This circle is the image of the vertical line segment A-B in the z-plane (and also the image of any line segments arising by shifting A-B up or down by

FIGURE 6 Illustration of the branch cut. The meaning of the points exp(A) and exp(B) are detailed in the text.
Regardless of the radius of the circle, it always meets three branches (the principal branch, and

FIGURE 7 The slanted line in the z-plane is mapped by the exponential to a spiral. The initial point of the spiral is
2.4 Riemann surfaces
2.4.1 Motivation
It is an inconvenience that the logarithm and the Lambert function (and, in general, the multi-valued functions, such as
This equation indeed holds for positive real x and y, but not in general. Take, for example,
On the other hand,
These problems motivated Bernhard Riemann to lay down a theory for the better understanding of multi-valued functions. His efforts culminated in a 1851 doctoral thesis, Foundations for a General Theory of Functions of a Complex Variable. Hermann Weyl further developed Riemann's ideas, and defined the abstract Riemann surfaces in his 1913 book The Concept of a Riemann Surface. Weyl wrote [183]:
I shared his [Felix Klein's] conviction that Riemann surfaces are not merely a device for visualizing the many-valuedness of analytic functions, but rather an indispensable essential component of the theory; not a supplement, more or less artificially distilled from the functions, but their native land, the only soil in which the functions grow and thrive.
All of these serve as a very good motivation for us to take a look at the general definition of Riemann surfaces, and apply what we have learned to the logarithm first, and then to the Lambert function. We will see that both of these functions can be represented as a single-valued function, by some “gluing process”. Riemann's idea was the following. Instead of taking much care about the range of multi-valued functions (
2.4.2 Covering maps
We start with the formal definition of covering maps and the related notions, then we apply these to the exponential function and its inverse.
Let X and S be two topological spaces. The covering map is a continuous and surjective function

FIGURE 8 Illustration of a covering: p is the covering map, X is the base space, and S is the total space. The pre-image of U by p is a collection of disjoint subsets in S, which are called “sheets”.
2.4.3 The notion of a surface
The topological space S will be called surface, if it is a Hausdorff space, and every point
The definition of a Riemann surface is necessarily more complicated, because it introduces coordinate charts on (a family of open sets of) the surface, and requires that these charts satisfy some natural properties. We will not need these details later, so we do not go into details here (but we will still call our constructed surfaces Riemann surfaces, because this is the common reference in the literature, see, for example [42]). Instead, we show two simple examples of a Riemann surface. Certainly the simplest is the complex plane itself. A second example is the torus, where the unit square's two opposite sides are glued together such that first we have a “tube” of length one, then we glue the two ends of the tube. The torus clearly satisfies the requirements of a surface.
Next, we see the more complicated example of the Riemann surface of the logarithm. For the sake of better understanding, we first show a heuristic argument.
2.4.4 The Riemann surface of the logarithm – heuristic way
In high school we learned that the inverse of a function can be depicted by mirroring the graph of the function through the 45-degree line
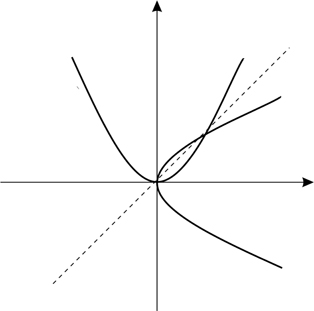
FIGURE 9 The graphical connection between the function
If we use this technique, from the graph of
We want to extend somehow this technique to the complex plane. If we scrutinize this trick of mirroring, we realize that what we do is the interchange of the axes:
That is, on our graph, the horizontal (w-)plane is
We introduced ξ and η to make the computer coding easier. Over this plane we want to place the values of the logarithm, the
After a moment of thinking, we realize that the first option would not visually work: all the branches have the same real part, (see (2.3)), while every branch has its own imaginary part, different from all the others. This would mean that over every point in the w-plane (
On the language of computers, we take therefore the three-dimensional
With the computer package Mathematica we can do the above by typing in the command
The ParametricPlot3D command plots a three dimensional surface in the
The execution of the command results in the plot that is given in Figure 10.

FIGURE 10 The Riemann surface of the logarithm. The arrow points to a line which belongs to the classical, real logarithm function whose values are pictured with gray values. Going toward the origin, the colors on the line are darker, meaning that log takes large negative values there. The lighter the color, the geater the value of the logarithm. In particular, the gray “loarithmically fades out” going outward of the origin, and it becomes white at infinite.
The spiral shape is due to the arg function. Going up/down in the ζ computer-coordinate, the argument function linearly increases/decreases. Revolving 360 degree (
The arrow points to the horizontal line which belongs to the principal branch over the line
This surface revolves around zero in the t-coordinate (computer ζ) infinitely many times, it is continuous outside of the origin, and establishes a one-to-one connection between the punctured complex plane and the different branches of the logarithm function. This surface is the Riemann surface of the logarithm.
2.4.5 The Riemann surface of the logarithm – exact way
As we said above, we want to extend the domain of the logarithm so that the domain has “sufficiently many” elements to map continuously and bijectively to the whole complex plane, not only to the horizontal strips. It is natural to think that a covering map will help here, since the inverse of a covering map “multiplies” the base set. We therefore attempt to construct this domain extension of ℂ* with the aid of coverings.
Let the base space be
The relationship among S, ℂ* and ℂ and their maps is shown in Figure 11. The requirement (2.4) can be expressed in algebraic terms: (2.4) is equivalent to the commutativity of the diagram of Figure 11, we require this diagram (without the log arrow!) to be commutative.

FIGURE 11 S is the Riemann surface of the logarithm, L is the continuous, single-valued logarithm, p is the covering which maps the Riemann surface S to ℂ*. We require that
How should the surface S be imagined? The inverse of the covering p maps every point in ℂ* back to S with infinite multiplicity. This shows that S should be considered as an infinite copy of the topological space ℂ*. Indeed, if at the end of the day we want everything single-valued, these copies must be distinguishable. On the other hand, we want S not only to be a topological space as the notion of covering minimally requires, but we want it to be a surface, so S must locally be homeomorphic to ℂ. These altogether show that S must be taken as an infinite copy of ℂ*.
We can make the situation more concrete by appealing to the requirement (2.4). Since p is continuous, L continuously maps the constituting copies of S onto the strips. As these strips join via horizontal lines, the copies of ℂ* in S must also be joined. The horizontal lines correspond to the negative axis (branch cut) in ℂ*, so we glue the copies of ℂ* via these branch cuts (hence the name actually).
The cutting and gluing is as follows. We cut up the plane ℂ* as it is shown on Figure 12. Let this plane be P0. Next, we took another copy P1 cut the same way, place it above P0, and glue P1's dashed half-line to the solid line of the sheet P0. Now take another copy,

FIGURE 12 S is constituted by an infinite copy of the punctured plane ℂ*. Each plane is cut as it is shown here. The dashed line does not belong to the set.
2.4.6 The monodromy group of the Riemann surface of the logarithm
Figures 4 and 6 and the text around them explained that a circle around the origin in the w-plane is mapped by a given branch of log such that we go through the whole strip belonging to this branch (see the A-B line segment in Figure 4). If we traverse the circle once again in the w-plane, we get the very same situation.
Now that we are familiar with the Riemann surface of the logarithm, let us see how the situation changes when we want to draw a circle around the origin. A short gaze at Figure 12 shows that the start and endpoint of the circle moved apart from each other. It is not a circle anymore but a curve: a spiral. If we wish, we can continue on this spiral upward or downward, stepping into another sheet of ℂ*.
Notice that even to start to draw the curve, we have to specify which sheet we choose, because there are infinitely many of them. We had no such option on the single space ℂ*.
As this is happening in the domain of the one-valued logarithm L, the logarithm of such a curve is passing through neighboring branches of the classical logarithm.
There are multi-valued functions for which the branches are taken in complicated orders when going around the branch points on a continuous curve. One can attach a group structure to the surface and to a fixed branch point which captures these branch-orders via permutations. This group of the surface is its monodromy group.
The Riemann surface of the logarithm has only one branch point, so there will be one single monodromy we want to determine. As we have already observed, going on our curve around the branch point zero, we touch the branches (which are indexed by the integers) in succession. Therefore, the monodromy group of the Riemann surface of the logarithm is the infinite cyclic groupZ.
2.5 The branches of the Lambert function
After seeing the simpler example of the logarithm, we are now ready to consider the branch structure of the Lambert W function.
2.5.1 The partition of the z-plane
The function
While
The complex number w falls onto the negative real axis if
The inequality
The equations in (2.7) are actually sufficient. If we draw the parametric curves encoded in (2.7), we see the plot on Figure 13: we have a partition of the complex plane by these curves.
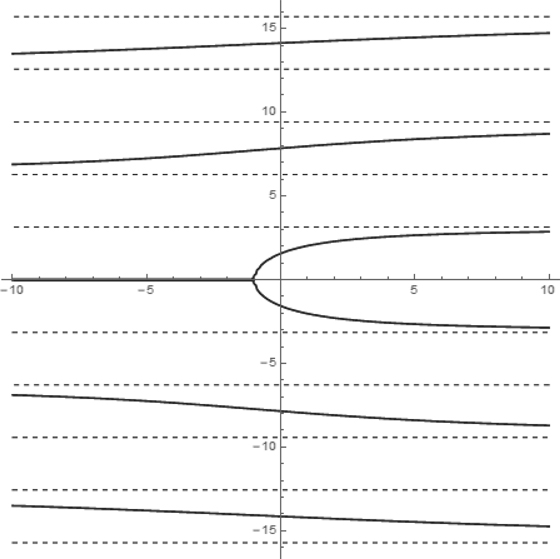
FIGURE 13 The partition of the z-plane by the images of the negative real axis in the range of the Lambert function (i.e., the inverse images of the negative real axis by
We therefore have the visual information, how the set
partitions the z-plane. This suggests that our choice of making the negative real line to be the branch cut is (almost) correct. Why only “almost” will be seen in the next subsection.
2.5.2 The branch separating curves
The straight line separating
If
The other curves
The curves limiting the branches are more complicated than the simple horizontal lines of the logarithm, but their asymptotic behavior is easy to find. For these curves (if
When s tends to plus or minus infinity, then t must tend to the non-zero multiples of π from the corresponding direction.
The principal branch is limited by the curve
(Notice that
The other curves are
These all correspond to the negative real axis in the domain of W, so the negative real line is another branch cut for the Lambert function; and the origin is thus a branch point.
It is now seen that W has two branch cuts: the negative real line, which belongs to infinitely many branches, and the half-line
These curves form a part of a class of curves studied around 2500 years ago, and they are called trisectrix of Hippias or quadratrix of Dinostratus.
2.5.3 The trisectrix of Hippias
The invention of the trisectrix is attributed to Hippias of Elis (5th century BCE), who used it to solve the angle trisection problem (hence the name trisectrix). About 70 years later, Dinostratus (390-320 BCE) used the same curve in the study of the problem of squaring the circle. This explains why the curve is also called quadratrix.
Both the angle trisection problem and squaring the circle is an impossible task if one only uses ruler and compass. However, if the quadratrix is at our disposal (that is, we have a quadratrix template or a quadratrix compass), both problems become solvable.
The description of the curve is as follows. Consider a square ABCD as depicted in Figure 14, and draw an inner circle with center A connecting the points B and D. Now take a point E which travels with constant angular velocity on the circle; and take another point F which travels with constant velocity from point D downward to point A. The points E and F start moving from D at the same time instant, and the velocities are chosen such that the points will arrive at B and at A at the same time. The trisectrix/quadratrix is defined to be the set of points S which are the intersections of the horizontal line through F and the line segment

FIGURE 14 The construction of the quadratrix.
The quadratrix can be drawn by using the tool depicted in Figure 15.
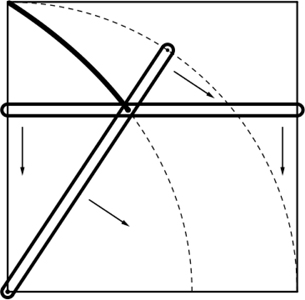
FIGURE 15 The quadratrix compass.
It is clear from the construction how to trisect an angle, or even more generally how to construct the angle

FIGURE 16 The solution of the angle trisection problem by using the trisectrix.
The quadratrix can be given by a one-parameter curve. Place the square ABCD on the Cartesian coordinate system such that A is placed at the origin, the vertex
It is now apparent that the quadratrix indeed parametrizes the branch separating curves, see (2.8).
The three figures of this subsection were taken from WikiMedia Commons, see the article “Quadratrix of Hippias”. For more on the history, the reader is directed to [71].
2.5.4 The closure of the branches
We still have to sort out how the branches are closed. Remember that in the case of the logarithm, we used the counter-clockwise continuity (CCC) principle to decide where the branches of the logarithm will be closed and open; see Figures 4 and 6.
CCC will be applied for the branches of W as well. What we need to do is find out the images of circles by W, one around the branch point
The branch point at
A circle of radius
which, by (2.5)-(2.6), corresponds to the curve in the z-plane satisfying the equation
Figure 17 shows this curve (where the radius is chosen to be one). By the CCC principle, the lower half of the limiting line therefore belongs to

FIGURE 17 The image of a circle by the principal branch of the W function in the z-plane. By the CCC principle, the lower half of the branch limiting line therefore belongs to
The branch point at 0
A circle around the other branch point, 0, satisfies the equation
which, in the z-plane, gives the curve parametrized as
as it is seen on Figure 18. Since the curve goes upward, we infer by the CCC principle that the branches are open from below, and closed from above. See Figures 19, 20, and 21, respectively, for the branches
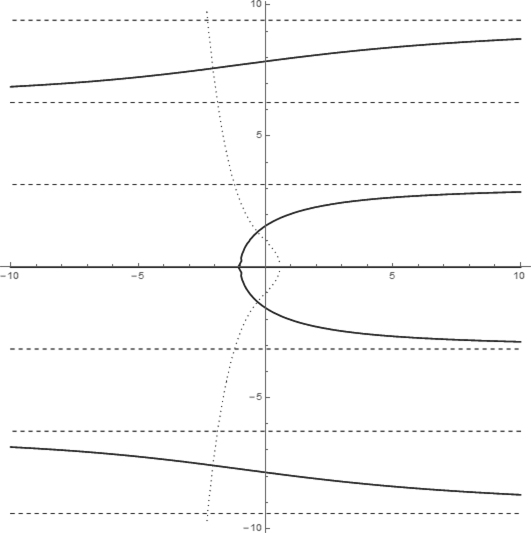
FIGURE 18 The image of a circle by the W function. By the CCC principle, the branches are open from below, and closed from above.

FIGURE 19 The closure of the branch

FIGURE 20 The closure of the branch W0.

FIGURE 21 The closure of the branch W1.
This choice of the closure is in agreement with our previous agreement that
2.5.5 The Riemann surface of the Lambert function
Now we study the Riemann surface and monodromies of the Lambert W function.
We number the sheets according to the branches they represent. Thus, for example, the zeroth sheet will belong to W0, and so on. The ranges of the principal branch and that of

FIGURE 22 Gluing of the sheets of the Riemann surface of W. L is the half-line of non-positive reals.
On the other hand, the sheet of
The curve along which
Next, we connect the sheets of
The zeroth and first sheets must also be glued together, because there is a curve between the corresponding branches of W. This curve is
It is worth to check now the branch cuts of the first, zeroth, and minus first sheets: all of them have already been glued together in such a way that is consistent with the closures fixed previously by the CCC principle!
The rest is easy: we glue the branch cut of the
Notice one peculiarity: the
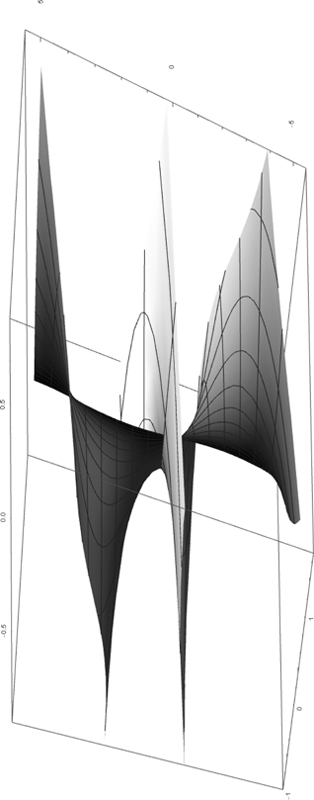
FIGURE 23 The Riemann surface of W.
The Mathematica code for plot 23 is the following:
2.5.6 Monodromies
After seeing how the sheets of the Riemann surface of W are glued together, we have no difficulty when determining the monodromy groups of the surface encircling the two branch points
Let us fix a circle of positive orientation around the origin of ℂ with radius
The zeroth sheet is not crossed at all. The monodromy group of the origin is the infinite cyclic group, ℤ.
Next, fix a circle around
The monodromy group of the point
To get a better visual information of how circles are mapped by the different branches of the Lambert function, we refer to Figures 24-25.

FIGURE 24 The images of three circles around the origin by W. The dotted curves (notice the tiny dotted curve around the origin inside the image of W0) belong to the circle of radius
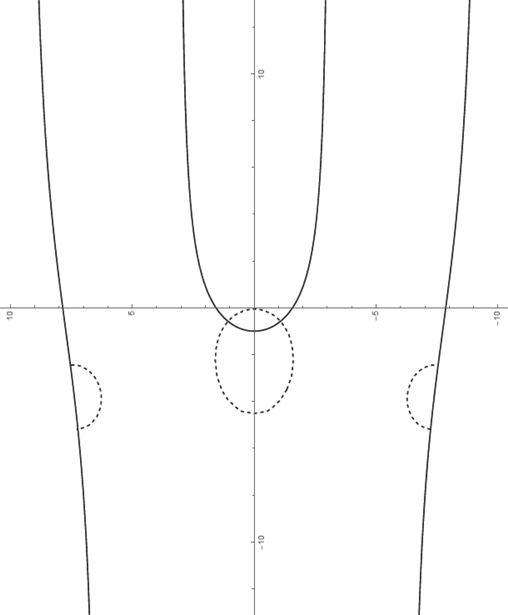
FIGURE 25 The images of three circles around
2.5.7 The fixed points of the Lambert function
The fixed points of the Lambert function are very easy to find, since these are the fixed points of its inverse
we see that
Thus
Further notes
Coverings. The covering map is a very important notion in algebraic topology: it helps analyze the topological nature of the base space. It is also important in the study of algebraic curves. See more on this topic in [123].
Monodromy group. The definition of the monodromy group would require some preparation. The logarithm and even the Lambert function does not require such a heavy machinery, because their monodromy structure is very simple. So we do not need the exact definition of the monodromy group. The book [96] is suggested for those readers who would like to know more about the monodromy group in general. One can learn from this text, for example, that the monodromy group of
Some mapping properties of W. By motivations coming from the analysis of delay differential equations, it was proven by Shinozaki [165] that