1
The Moving Body
Guide to the Nervous System
The human nervous system controls the functions of each different system of the body by means of neurons. It has two parts:
1. Central nervous system (CNS): encompasses the brain and spinal cord. This system enables us to think, learn, reason, and maintain balance.
2. Peripheral nervous system (PNS): located outside the brain and spinal cord, in the outer parts of the body. This system helps us to carry out voluntary and involuntary actions and enables feeling through the senses.
The PNS comprises the following:
1. Autonomic nervous system (ANS): responsible for regulating the internal organs and glands; it controls involuntary actions. The ANS consists of three subsystems:
i. Sympathetic nervous system: activates what is commonly known as the “fight or flight” response.
ii. Parasympathetic nervous system: stimulates what are referred to as “rest and digest” activities.
iii. Enteric nervous system: controls the gastrointestinal system in vertebrates.
2. Somatic nervous system (SNS): carries information from nerves to the CNS and from the CNS to the muscles and sensory fibers; it is associated with voluntary muscle control.
The practice of somatics is noted in this book as, quite simply, using the body’s intelligence. The integration of the mind, body, and feelings to allow the body’s non-verbal communication system to respond in a healthy way is key to wellness. Somatic healing is about getting in touch with the “sixth sense” (intuitive response) to facilitate a breakthrough in personal health. It is about listening to a language of immediate experiences. Kinesthetic awareness is part of this: being present, listening to the body, and being conscious and knowledgeable about where our bodies are in space and what is happening anatomically is paramount to yoga. A well-balanced, continual yoga practice leads to muscle memory and intelligence through nerve impulse as well. The nervous system is extremely complex. Try to follow the pathway of just one nerve, the genitofemoral. This nerve
• is part of the upper region of the lumbar plexus, one of three components of the larger lumbosacral plexus of the lower vertebral column;
• originates from L1 and L2 nerve roots;
• emerges on the anterior surface of the psoas major muscle, where the lumbar plexus is embedded and has many branches;
• divides into a femoral branch and a genital branch;
• supplies the skin anterior to the upper part of the femoral triangle;
• in males, travels through the inguinal canal, supplying the cremaster muscle (covering the testes) and scrotal skin;
• in females, ends in the skin of the mons pubis (anterior portion of the vulva) and the labia majora. The function of these branches of the genitofemoral nerve is sensory in both genders.


Figure 1.1: a) Nervous system table; b) Genitofemoral nerve.
This information is included to prove how difficult it is to deal with neurology in yoga. However, the nerve complex can be referred to if one has the knowledge to do so.
Nerve Entrapment
Nerve entrapment is compression that may become a source of pain and can be reduced if practicing the correct asanas. (The expression “pinched nerve” usually refers to carpal tunnel syndrome or sciatica, but it is applicable to any pressure on a particular nerve or group of nerves.) As an example, when a person experiences sciatica, it is usually indicated by pain along the path of the sciatic nerve from the spine into the posterior thigh. A common muscle that can trap this nerve is the piriformis (Chapter 8). A yoga practitioner can use any number of stretches or postures (such as a supine twist) to relax this muscle, thus lessening the pressure on the sciatic nerve that passes behind it.
Another example of nerve impingement that might be relieved by yoga is in the brachial plexus area. This is a network of nerves that sends signals from the spine to the shoulder, arm, and hand. A brachial plexus injury occurs when these nerves are stretched, pinched, or even torn (this would require surgery). This area is compromised if the posture of the neck or shoulders (such as rounding) interferes with the path of a nerve impulse. Any yoga posture that emphasizes spine extension and shoulder placement (typically “back and down”)—for example Mountain Pose (Tadasana)—will help to open this area.
Causes are specific to the area of concern and can range from degenerating discs, bone spurs, arthritis, and muscle dysfunction to injury and emotional trauma causing muscle tension. It is best to have a licensed therapist, physician, or neurologist diagnose the condition.
It has been proven that nerve entrapment may be relieved through muscular release. Some asanas can do this.
A Note About Peripheral Nerve Supply
The relevant peripheral nerve supply is listed with each muscle presented in this book, for those who want to know. However, information about the spinal segment2 from which the nerve fibers emanate often differs among sources. This is because it is extremely difficult for anatomists to trace the route of an individual nerve fiber through the intertwining maze of other nerve fibers as it passes through its plexus (plexus = a network of nerves: from the Latin word plectere, meaning “to braid”). The most applicable nerve roots for each muscle have been adopted for this book.
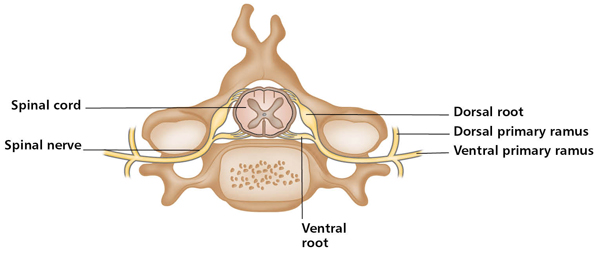
Figure 1.2: A spinal segment showing the nerve roots combining to form a spinal nerve, which then divides into ventral and dorsal rami.
Anatomical Orientation
Anatomical Directions
To describe the relative positions of body parts and their movements, it is essential to have a universally accepted reference position. The standard body position, known as the “anatomical position,” serves as this reference. Anatomical position is simply standing upright with arms hanging by the sides, palms facing forward (see Figure 1.3). Most directional terminology used refers to the body as if it were in the anatomical position, regardless of its actual position. Note also that the terms “left” and “right” refer to the sides of the object or person being viewed and not those of the reader.

Figure 1.3: Anterior
In front of; toward or at the front of the body.

Figure 1.4: Posterior
Behind; toward or at the back of the body.
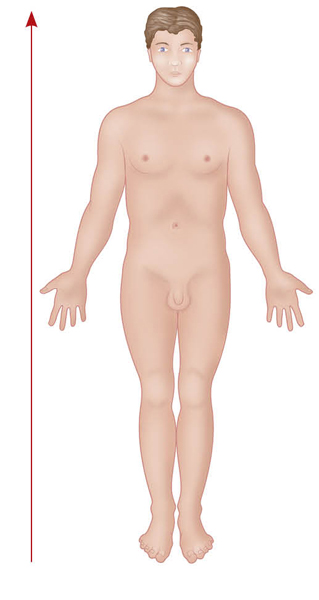
Figure 1.5: Superior
Above; toward the head or upper part of the structure or body.

Figure 1.6: Inferior
Below; away from the head or toward the lower part of the structure or body.

Figure 1.7: Medial
(From medius in Latin, meaning “middle”)
Toward or at the midline of the body; on the inner side of a limb.

Figure 1.8: Lateral
(From latus in Latin, meaning “side”)
Away from the midline of the body; on the outer side of the body or a limb.
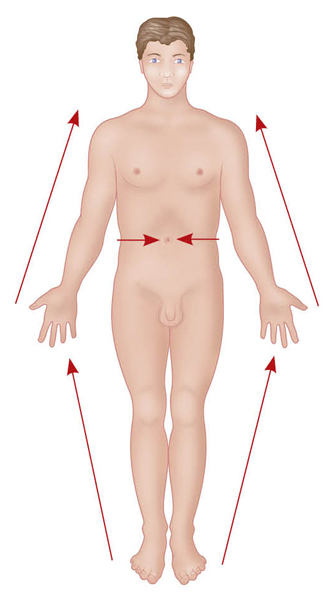
Figure 1.9: Proximal
(From proximus in Latin, meaning “nearest”)
Closer to the center of the body (the navel) or to the attachment point of a limb to the torso.

Figure 1.10: Distal
(From distans in Latin, meaning “distant”)
Farther away from the center of the body, or from the attachment point of a limb to the torso.

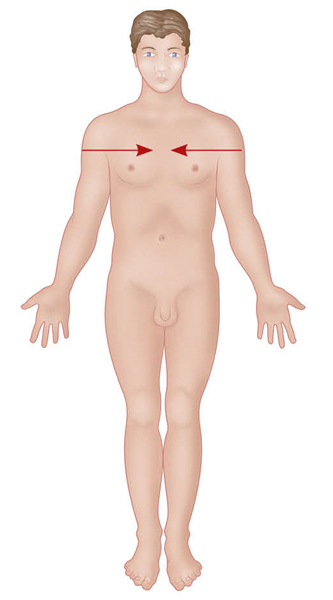
Figure 1.12: Deep
Farther away from the body surface; more internal.

Figure 1.13: Dorsal
The posterior surface of something, e.g., the back of the hand or top of the foot.

Figure 1.14: Palmar
The anterior surface of the hand, i.e., the palm.

Figure 1.15: Plantar
The sole of the foot.
Planes of the Body
The term “planes” refers to two-dimensional sections through the body. They provide a view of the body or body part, as though it has been cut through by an imaginary line.

Figure 1.16: Planes of the body.
• The sagittal planes cut vertically through the body from anterior to posterior, dividing it into right and left halves. Figure 1.16 shows the midsagittal plane.
• The frontal (coronal) planes pass vertically through the body, dividing it into anterior and posterior sections, and lie at right angles to the sagittal plane.
• The transverse planes are horizontal cross-sections, dividing the body into upper (superior) and lower (inferior) sections, and lie at right angles to the other two planes. Figure 1.16 illustrates the most frequently used planes.
Use of the three major planes is important in yoga because the body is meant to work in all planes in order for it to be most efficient. When one practices yoga in a structured class, it is wise to incorporate movement in all planes by using various asanas. Examples are as follows:
SAGITTAL: Sun Salutation (Surya Namaska); (surya = sun; namaskar = salute)
1. Begin in Mountain Pose.
2. Inhale to Crescent Stretch: bring the arms overhead and stretch to the sky.
3. Exhale and release to Forward Bend.
4. Inhale, lifting the spine forward to an extended position, with hands on the shins.
5. Exhale to Forward Bend.
6. Inhale and take one leg back to a lunge position.
7. Exhale and take the other leg back to Plank and lower to the floor.
8. Inhale to Cobra.
9. Exhale to Child’s Pose. Rest for three full breaths.
10. Inhale to Table position.
11. Exhale to Down Dog. Rest for three long, full Ujjayi (Ocean Breaths).
12. Inhale, walking or jumping the feet to a position between the hands.
13. Exhale to Forward Bend. Inhale and do number 4, then exhale back to Forward Bend.
14. Inhale to roll up the spine, raising the arms to the sky (Reverse Swan Dive).
15. Exhale to Mountain Pose (hands in Namaste, prayer position, centering and sealing the practice).
FRONTAL: Gate Pose (Parighasana) or any posture that incorporates abduction or adduction of a particular joint, or lateral flexion of the spine (side bending).
HORIZONTAL: Revolved Triangle (Parivrtta Trikonasana) or any spinal twist or rotary movements, such as supination/pronation.
Anatomical Movements
The direction in which body parts move is described in relation to the fetal position. Moving into the fetal position results from flexion of all the limbs. Straightening out of the fetal position results from extension of all the limbs. These actions are also done in the sagittal plane.
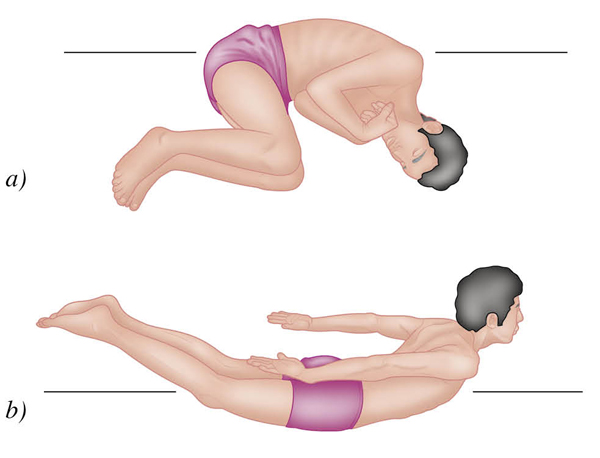
Figure 1.17: a) Flexion into the fetal position; b) Extension out of the fetal position.
Main Movements

Figure 1.18: Flexion: Bending to decrease the angle between bones at a joint. From the anatomical position, flexion is usually forward, except at the knee joint, where it is backward. The way to remember this is that flexion is always toward the fetal position.
Extension: Straightening or bending backward away from the fetal position.
Hyperextension: Extending the limb beyond its normal range of motion.

Figure 1.19: Lateral Flexion: Bending the torso or head laterally (sideways) in the frontal (coronal) plane.
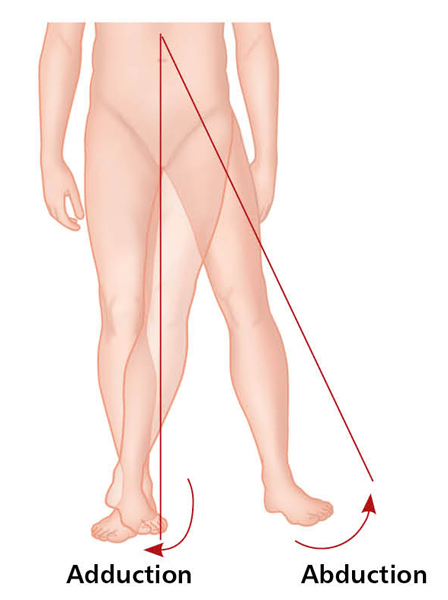
Figure 20: Abduction: Movement of a bone away from the midline of the body or the midline of a limb. Adduction: Movement of a bone toward the midline of the body or the midline of a limb.

Note: For abduction of the arm to continue above the height of the shoulder (elevation through abduction, see p. 16), the scapula must rotate on its axis to turn the glenoid cavity upward (see Figure 1.28b).

Figure 1.21: Rotation: Movement of a bone or the trunk around its own longitudinal axis.
Medial rotation: To turn in, toward the midline.
Lateral rotation: To turn out, away from the midline.

Figure 1.22: Circumduction: Movement in which the distal end of a bone moves in a circle, while the proximal end remains stable; it is a combination of flexion, abduction, extension, and adduction.
Other Movements
The movements given in this section are those that occur only at specific joints or parts of the body, usually involving more than one joint.

Figure 1.23: a) Pronation: To turn the palm of the hand down to face the floor (if standing with elbow bent to 90º, or if lying flat on the floor) or away from the anatomical and fetal positions.
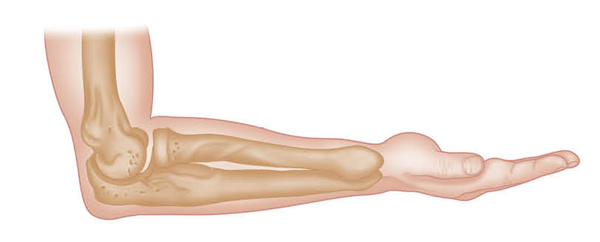
Figure 1.23: b) Supination: To turn the palm of the hand up to face the ceiling (if standing with elbow bent to 90º, or if lying flat on the floor) or toward the anatomical and fetal positions.

Figure 1.24: Plantar flexion: To point the toes down toward the ground.
Dorsiflexion: To point the toes toward the sky (a popular yoga position).

Figure 1.25: Inversion: To turn the sole of the foot inward, so that the soles would face each other; weight would be on the outside of the foot (sometimes referred to as “supination”).
Eversion: To turn the sole of the foot outward, so that the soles would face away from each other; weight would be on the inside of the foot (sometimes referred to as “pronation”).

Figure 1.26: Protraction: Movement forward in the transverse plane. For example, protracting the shoulder girdle, as in rounding the shoulder.

Figure 1.27: Retraction: Movement backward in the transverse plane, as in bracing the shoulder girdle back, military style.

Figure 1.28: a) Elevation: Movement of a part of the body upward along the frontal plane. For example, elevating the scapula by shrugging the shoulders.
Depression: Movement of an elevated part of the body downward to its original position.

Figure 1.28: b) Abducting the arm at the shoulder joint, then continuing to raise it above the head in the frontal plane can be referred to as “elevation through abduction.” In yoga, as the arms are raised overhead, the action of depressing the shoulder girdle is emphasized once the full position is reached, as in Warrior I or Down Dog.
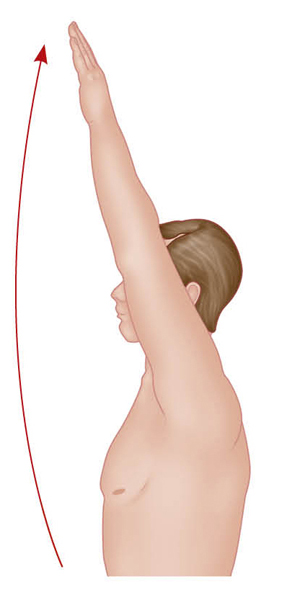
Figure 1.28: c) Flexing the arm at the shoulder joint, then continuing to raise it above the head in the sagittal plane can be referred to as “elevation through flexion.”

Figure 1.29: Opposition: Movement specific to the saddle joint of the human thumb, which enables one to touch the thumb to the tip of each finger of the same hand.
Skeletal System

Figure 1.30: a) Skeleton (anterior view).

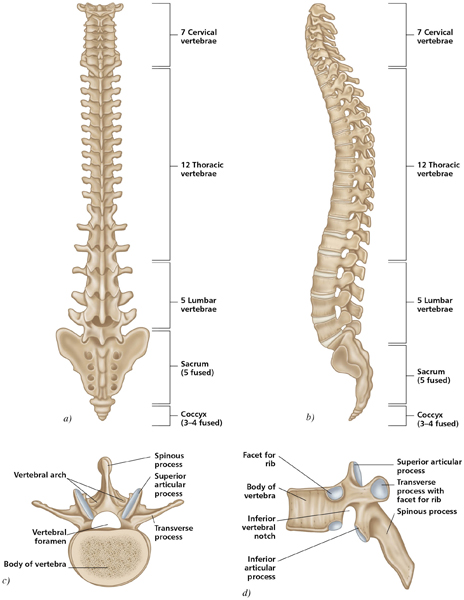
Figure 1.31: a) Spine: Posterior view; b) Spine: Lateral view; c) Vertebrae—lumbar (superior view) and d) Thoracic (lateral view).



Figure 1.33: Scapula (posterior view).

Figure 1.34: Skull to sternum (anterior view—the mandible and maxilla are removed).

Synovial Joints
Joints, or articulations, have two functions: they provide stability and give the rigid skeleton mobility. Immovable (synarthrotic) and slightly movable (amphiarthrotic) joints are found mainly in the axial skeleton, where joint stability is important to protect the internal organs. Synovial joints are freely movable (diarthrotic), and so are found predominately in the limbs, where a greater range of movement is required. These joints have a number of distinguishing features:
• Articular (hyaline) cartilage covering the ends of the bones that form the joint
• A joint cavity filled with lubricating synovial fluid (a slippery fluid which provides a film that reduces friction)
• Collateral or accessory ligaments that provide reinforcement and strength
• Bursae (fluid-filled sacs) that provide cushioning
• Tendon sheaths which wrap themselves around tendons that are subject to friction, in order to protect them
Articular discs (menisci) are present in some synovial joints (e.g., the knee) and act as shock absorbers. There are six types of synovial joint: plane (or gliding), hinge, pivot, ball-and-socket, condyloid, and saddle.
Plane or Gliding
Movement occurs when two generally flat or slightly curved surfaces glide across one another. Examples include the acromioclavicular and sacroiliac joints.
Hinge
Movement occurs around only one axis, a transverse one, as in the hinge of the lid of a box. A protrusion of one bone fits into a concave or cylindrical articular surface of another, permitting flexion and extension. Examples include the interphalangeal joints, the elbow, and the knee.
Pivot
Movement takes place around a vertical axis, like the hinge of a gate. A more or less cylindrical articular surface of bone protrudes into and rotates within a ring formed by bone or ligament. An example is the joint between the radius and the ulna at the elbow.
Ball-and-Socket
This joint consists of a “ball” formed by the spherical or hemispherical head of one bone that rotates within the concave “socket” of another, allowing flexion, extension, adduction, abduction, circumduction, and rotation. Thus these joints are multiaxial and allow the greatest range of movement of all the joints. Examples are the shoulder and hip joints.
Condyloid
These joints have a spherical articular surface that fits into a matching concavity. They permit flexion, extension, abduction, and adduction; a combination of these is called “circumduction.” Examples are the wrist and the metacarpophalangeal joints of the fingers (but not the thumb).
Saddle
In a saddle joint the two articulating surfaces respectively have convex and concave areas, which fit together like a saddle and a horse’s back. Saddle joints permit even more movement than condyloid joints. An example is the carpometacarpal joint of the thumb, which allows opposition of the thumb to the fingers.

Figure 1.36: The synovial joints.
Guide to the Muscular System

Figure 1.37: a) The major skeletal muscles (anterior view).

Muscle Attachment
Skeletal (somatic or voluntary) muscles constitute approximately 40% of the total human body weight. Their primary function is to produce movement by contracting and relaxing in a coordinated manner. They are attached to bone by tendons (or sometimes directly). The place where a muscle attaches to a relatively stationary point on a bone, either directly or via a tendon, is called the “origin.” When the muscle contracts, it transmits tension to the bones across one or more joints, and movement occurs. The end of the muscle which attaches to the bone that moves is called the “insertion.” Tendon attachments are also referred to as “proximal” (the one nearest the center) and “distal” (farthest from the center).

Figure 1.38: A tendon attachment.
Tendons and Aponeurosis
Muscle fascia (connective tissue components of a muscle) combine together and extend beyond the end of the muscle as round cords or flat bands called “tendons,” or as a thin, flat, and broad sheet-like material called an “aponeurosis.” The tendon or aponeurosis secures the muscle to the bone or cartilage, to other muscles, or to a seam of fibrous tissue called a “raphe” (a seam-like union of the two lateral halves of a part or organ, as in the tongue).
Intermuscular Septa
In some cases, flat sheets of dense connective tissue known as “intermuscular septa” penetrate between muscles, providing another medium to which muscle fibers may attach.

Figure 1.39: An attachment by aponeurosis.
Sesamoid Bones
If a tendon is subject to friction, it may (though not necessarily) develop a sesamoid bone within its substance. An example is the peroneus longus tendon in the sole of the foot. However, sesamoid bones might also appear in tendons not subject to friction. The main functions are to modify pressure, reduce friction, and sporadically change the direction of a muscle pull.
Multiple Attachments
Many muscles have only two attachments, one at each end. However, more complex muscles are often attached to several different structures at their origin and/or insertion. If these attachments are separated, effectively meaning the muscle gives rise to two or more tendons and/or aponeuroses inserting into different places, the muscle is said to have two heads. For example, the biceps brachii has two heads at its origin: one from the coracoid process of the scapula and one from the supraglenoid tubercle (see Chapter 6). The triceps brachii has three heads and the quadriceps has four.
Muscle Mechanics
A muscle will contract upon stimulation in an attempt to bring its attachments closer together, but this does not necessarily result in a shortening of the muscle. If the contraction of muscle results in the muscle creating movement of some sort, the contraction is called “isotonic”; if no movement results, the contraction is called “isometric.”
Isometric Contraction
An isometric contraction occurs when a muscle increases its tension, but the length of the muscle is not altered. In other words, although the muscle tenses, the joint over which the muscle works does not move. One example of this is holding a heavy object in the hand with the elbow held stationary and bent at 90 degrees. Trying to lift something that proves to be too heavy to move is another example. Note also that some of the postural muscles are largely working isometrically by automatic reflex. For example, in the upright position, the body has a natural tendency to fall forward at the ankle. This is prevented by isometric contraction of the calf muscles. Likewise, the center of gravity of the skull would make the head tilt forward if the muscles at the back of the neck did not contract isometrically to keep it centralized. Isometric contractions are very common in yoga, as postures are held against an immovable force, such as the floor or a wall.

Figure 1.40: Isometric contraction.
Isotonic Contraction
Isotonic contractions of muscle enable us to move about. There are two types of isotonic contraction: “concentric” and “eccentric.”
Concentric Contraction
In concentric contractions, the muscle attachments move closer together, causing movement at the joint. Using the example of holding an object, if the biceps brachii contracts concentrically, the elbow joint will flex and the hand will move toward the shoulder, against gravity. Similarly, if we do a sit-up exercise, the abdominal muscles contract concentrically to raise the torso.
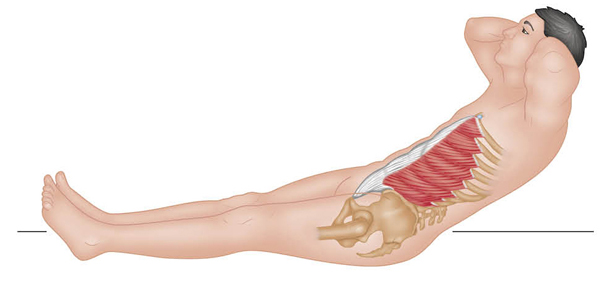
Figure 1.41: Abdominals contract concentrically to raise the body.
Eccentric Contraction
Eccentric contraction means that the muscle fibers “pay out” in a controlled manner to slow down movements in a case where gravity, if unchecked, would otherwise cause them to be too rapid—for example, lowering an object held in the hand down to your side. Another example is simply sitting down into a chair or lowering the torso after a sit-up exercise (the abdominals contract eccentrically to control the impact onto the floor). Therefore, the difference between concentric and eccentric contraction is that in the former, the muscle shortens, and in the latter, it lengthens.
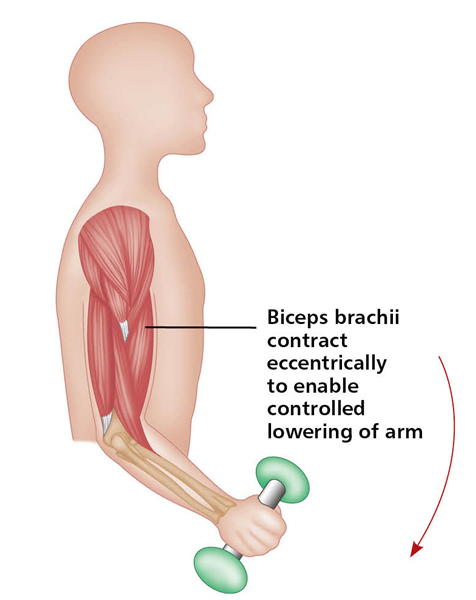
Figure 1.42: Eccentric isotonic contraction.
Group Action of Muscles
Muscles work together or in opposition to achieve a wide variety of movements. Therefore, whatever one muscle can do, there is another muscle that can undo it. Muscles may also be required to provide additional support or stability to enable certain movements to occur elsewhere.
Muscles are classified into four functional groups:
1. Prime mover or agonist
2. Antagonist
3. Synergist
4. Stabilizer
Prime Mover or Agonist
A prime mover (also called an “agonist”) is a muscle that contracts to produce a specified movement. An example is the biceps brachii, which is the prime mover in elbow flexion. Other muscles may assist the prime mover in providing the same movement, albeit with less effect: such muscles are called “assistant movers” or “secondary movers.” For example, the brachialis assists the biceps brachii in flexing the elbow and is therefore a secondary mover.
Antagonist
The muscle on the opposite side of a joint to the prime mover, and which must relax to allow the prime mover to contract, is called an “antagonist.” For example, when the biceps brachii on the front of the arm contracts to flex the elbow, the triceps brachii on the back of the arm must relax to allow this movement to occur. When the movement is reversed, that is, when the elbow is extended against resistance, the triceps brachii becomes the prime mover and the biceps brachii assumes the role of antagonist.


Figure 1.43: Group action of muscles: a) Flexing the arm at the elbow; b) Extending the arm at the elbow (showing reversed roles of prime mover and antagonist).
Synergist
Synergists are muscles that enhance the movement of an agonist. They can also prevent any unwanted movements that might occur as the prime mover contracts. This is especially important where a prime mover crosses two joints, because when it contracts, it will cause movement at both joints, unless other muscles act to stabilize one of the joints. For example, the muscles that flex the fingers not only cross the finger joints, but also cross the wrist joint, potentially causing movement at both joints. However, because you have other muscles acting synergistically to stabilize the wrist joint, you are able to flex the fingers into a fist without also flexing the wrist at the same time.
A prime mover may have more than one action at the same or another joint, so synergists also act to eliminate the unwanted movements. For example, the biceps brachii will flex the elbow, but its line of pull will also supinate the forearm (twist the forearm, as in tightening a screw). If you want flexion to occur without supination, other muscles must contract to prevent this supination. In this context, such synergists are sometimes called “neutralizers,” counterbalancing the unwanted movement.
Stabilizer
A synergist is more specifically referred to as a “fixator” or “stabilizer” when it immobilizes the bone of the prime mover’s origin, thus providing a stable base for the action of the prime mover. The muscles that stabilize (fix) the scapula during movements of the upper limb are good examples. The sit-up exercise gives another good example. The abdominal muscles attach to both the rib cage and the pelvis. When they contract to enable you to perform a sit-up, the hip flexors will contract synergistically as fixators to prevent the abdominals from tilting the pelvis, thereby enabling the upper body to curl forward as the pelvis remains stationary.
Many yoga positions are held isometrically, against an immovable force such as the floor. This is a form of strength training. But to “get there and return from” a given position, muscles usually contract concentrically or eccentrically. To better understand these concepts, consider the following analysis of Boat Pose (Navasana).

Figure 1.44: Boat Pose—in Sanskrit, Navasana.
Boat Pose (Figure 1.44) is mainly a hip flexion and spinal extension asana. If the arms are reaching forward, shoulder flexion is added.
Approach: The main muscles that are contracting concentrically (shortening) against resistance (gravity) “to get there” are the hip flexors: rectus femoris, sartorius, and iliopsoas. The hip adductors help to keep the legs together. The quadriceps muscles also contract to keep the knees straight. (If this pose is too challenging, the knees can bend and hands may be placed on the floor.)
If the pose is done correctly, the deep posterior muscles (transversalis, etc.) and other strong spine extensors (e.g., erector spinae) will also contract to straighten the spine against the resistance of gravity. Thus all the contracting muscles are the agonists (the movers, or mobilizers), and their antagonists are the muscles on the opposite side of the movers: the hip extensors (gluteus maximus and hamstrings), knee flexors (hamstrings), and spinal flexors (abdominals).
At the shoulder joint, the arm flexors (upper pectoralis major, anterior deltoid, biceps brachii, and coracobrachialis) are working to hold the arms forward in flexion against gravity.
Stabilizers: The psoas major is acting as a stabilizer for the hip and lumbar spine, and as a synergist with the iliacus in hip flexion. Other deep core muscles, such as the transversus abdominis and quadratus lumborum, are stabilizing the lower spine as well. The question is, what are the abdominals doing? One can certainly feel them working in this posture. The rectus abdominis and obliques are actually stabilizing, acting to hold the posture and support the lumbar spine.
Descent: To come out of the pose, the agonists, especially at the hip, must now contract eccentrically (lengthen) to keep the legs from slamming into the floor. In other words, they control the movement toward resistance, or else gravity would cause the downward movement to be too fast.
In Navasana, the muscles being stretched are mostly the hamstrings, especially if the knees are straightened. If the arms are forward, the latissimus dorsi, teres major and minor, infraspinatus, posterior deltoid, and triceps are lengthened to some extent. These are muscles located posteriorly (on the back) that extend the shoulder joint. The shoulder girdle is fixed neutrally.
An important note: All muscles have the ability to be agonists, antagonists, synergists, and stabilizers (fixators). The role of the muscle depends on the movement being performed. A muscle can be a primary mover, and other muscles that can do the same movement are called “synergistic” where they aid the primary muscle or become secondary movers or supporters of the position. Sometimes the term “neutralizer” is used as well as “synergist” when a muscle acts to cancel out an unwanted movement by another muscle (usually a muscle that can work two joints, called “biarticulate”). Complicated!
In yoga asanas, it is most important to know which muscles are strengthening (contracting), which muscles are being stretched (lengthened), and which muscles are working as stabilizers to support the pose.
Levers
A lever is a device for transmitting but not creating force and consists of a rigid bar moving about a fixed point (fulcrum). More specifically, a lever consists of an effort force, a resistance force, a rigid bar, and a fulcrum. The bones, joints, and muscles together form a system of levers in the body, where the joints act as fulcrums, the muscles apply the effort, and the bones carry the weight of the body parts to be moved. Levers are classified according to the position of the fulcrum, resistance (load), and effort relative to each other.
In a first-class lever, the effort and resistance are located on opposite sides of the fulcrum. In a second-class lever, the effort and resistance are located on the same side of the fulcrum, and the resistance is between the fulcrum and the effort. Finally, in a third-class lever, the effort and resistance are located on the same side of the fulcrum, but the effort acts between the fulcrum and the resistance; this is the most common type of lever in the human body.


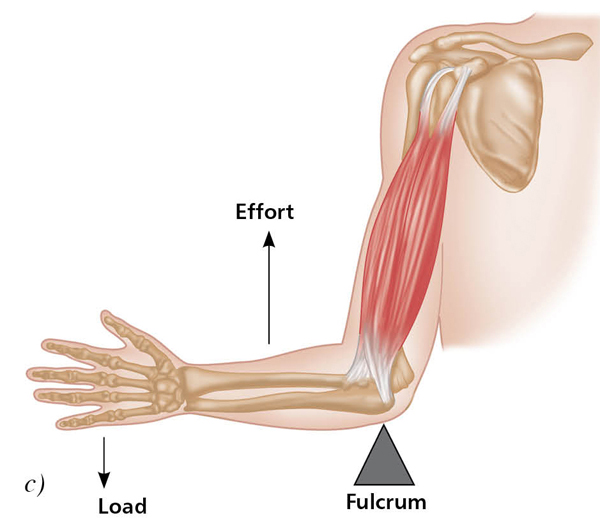
Figure 1.45: Examples of levers in the human body: a) First-class lever; b) Second-class lever; c) Third-class lever.
2 A spinal segment is the part of the spinal cord that gives rise to each pair of spinal nerves (a pair consists of one nerve for the left side of the body and one for the right side). Each spinal nerve contains motor and sensory fibers. Soon after the spinal nerve exits through the foramen (the opening between adjacent vertebrae), it divides into a dorsal primary ramus (directed posteriorly) and a ventral primary ramus (directed laterally or anteriorly). Fibers from the dorsal rami innervate the skin and extensor muscles of the neck and trunk. The ventral rami supply the limbs, in addition to the sides and front of the trunk.