If you’ve ever taken an exhilarating ride in a speedboat, you probably remember how the boat churned up waves as it muscled its way through the water. There were waves that rolled off diagonally to left and right from the bow, as well as those that created a foaming “rooster tail” at the stern. If you looked past the stern, you might have noticed that the bow waves form two straight lines shaped as a V that stretch far off into the distance (fig. 13.1).
Any conventional vessel that displaces water, whether a rowboat or an oil tanker, has to push the water out of its path in order to advance. That takes energy. In fact, nearly all the fuel that a boat’s engine burns is used to push the water and, in the process, create waves. The waves then carry the energy away from the boat.
One of the tasks of a naval architect, therefore, is to design the hulls of ships so that they encounter the least resistance from the water and require a minimum of fuel. That means reducing the tendency of the ship to create waves. Designers of high-performance sailboats are especially concerned with optimizing the hulls. These experts use numerical simulations as well as experiments with small-scale ship models to shape the hulls. But it is still a bit of an art.
Of course, the best way to avoid making waves is to lift the boat out of the water. A speedboat or sailboat that skips, or “planes,” over the water above a certain speed can do that. And a hydrofoil with underwater wings does even better. But even these craft make some waves and are subject to the same limitations.
In this chapter we’ll examine the science of ship waves and the art of suppressing them. We’ll see how far the experts have been able to approach their goal.
Fig. 13.1 A fast ship generates a wake of two straight lines whose angle remains the same as the ship moves ahead. (Wikipedia.)
Children often draw pictures of the beautiful wave pattern that a duck makes as it paddles across a pond. Mariners are aware of the same pattern on a larger scale made by a ship on a flat sea. Figure 13.1 reminds us of the pattern. It shows the typical wake of a small, fast ship as it cruises across a bay. We see a pair of diverging waves, looking a bit like the feathers on the tail of an arrow. The turbulent wake of this ship obscures another set of so-called transverse waves, crossing the path of the ship at right angles. We see them better in figure 13.2.
If we could watch this ship for a few minutes, we’d see that the entire pattern of waves moves along with the boat. As the diverging waves spread out to the left and right, new waves are born at the bow of the boat and new transverse waves also appear at the stern. The pattern grows wider behind the boat, but its shape remains unchanged—a self-similar pattern. The pattern has the remarkable property that it always fits between two straight lines that enclose an angle of precisely 39 degrees, regardless of the speed or size of the ship. The half-angle between one of these straight lines and the path of the ship equals 19.5 degrees.
Fig. 13.2 An aerial view of a complete set of transverse and diagonal Kelvin waves in the wake of a boat. (Photo 14486777, dreamstime.com.)
Lord Kelvin, whom we have met several times before, was the first to explain the origin of this distinctive wave system. Kelvin was fascinated by water waves for much of his life. As a student at Cambridge, he was a member of the rowing club and was obsessed with winning trophies. His team won the annual sculling race, the Colquhoun Sculls, in 1843. Like so many scullers, he must have noticed the smooth waves his slim shell cut into the water.
Kelvin was also an avid yachtsman who loved to race his boat, Lalla Roohk, during the summer. In 1871 he took Hermann von Helmholtz, the famous German physician and physicist, racing at Invernay and cruising to the Hebrides. The two men, who independently discovered the Kelvin-Helmholtz instability (see chapter 3), might have debated the origin of the yacht’s waves as they glided through the sea.
In addition to being a brilliant mathematician and physicist, Kelvin was also an engineer. His skill was put to a practical test when he was asked to explain why the turret ship HMS Captain, the glory of the British Royal Navy, sank in 1870 with almost 500 lives lost (including its designer, Cowper Coles) within six months of its launching. This wooden sailing ship was constructed with new technology: two gun turrets that could swivel around to fire in any direction. However, when the ship rolled in a gale, it quickly lurched over past 18 degrees and capsized.
The British Admiralty swallowed its pride and asked Lord Kelvin to determine exactly what had happened. He performed the calculations that showed just how unstable and top-heavy the ship had been. Even though some shipbuilding experts had warned against installing the heavy turrets so high up above the main deck, the political pressure was too strong, and this wooden sailing ship was built with tall masts, acres of sail—and heavy iron guns. Kelvin calculated that the ship simply had not had enough “righting moment” to roll back up upright when its deck tipped down enough to touch the ocean.
In the mid-1880s Kelvin turned his attention to ship waves. He developed a method of calculating the interference pattern that a small ship generates on deep water. He described his theory at a public lecture at the Institution of Mechanical Engineers in Edinburgh in 1887 and published a refined theory in 1906. His mathematics is daunting, but we can understand the essence of his result by using our present understanding of gravity waves.
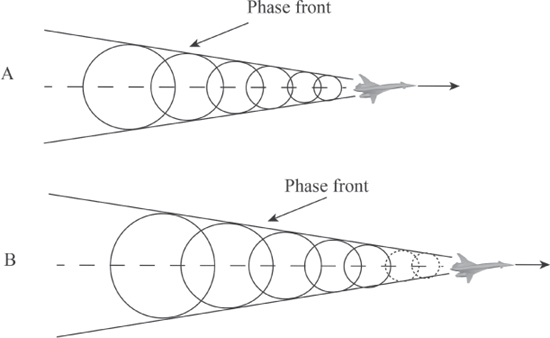
To begin with, we should recall the pattern a supersonic aircraft generates in flight. Figure 13.3A shows how the craft excites a spherical shockwave at every point along its path. Each wave expands from its fixed center at the constant speed of sound (1,236km/h, or 768mph, at sea level). If the plane flies at a constant speed, all the spheres will arrive at a common three-dimensional shock front that has the shape of a cone.
As the plane flies on, the entire cone moves with it (fig. 13.3B). New shocks appear just behind the plane (shown in dashed lines), and the existing shocks grow in size. We don’t see the individual shocks inside the cone because they overlap and cancel each other out. Only at the conical front are the shocks in phase and therefore visible. The angle at the tip of the cone is determined by the ratio of sound speed to aircraft speed. So the faster the plane flies, the narrower the cone.
Now let’s turn to ship waves in deep water. They are similar to airplane waves in some respects and different in others. If we think of the ship as a tiny point on the surface of the sea, moving at a constant speed, it will generate circular gravity waves with a broad wavelength spectrum at every point along its path, in analogy to the supersonic aircraft. It would be difficult to describe how all these waves, with all their different wavelengths, interfere to produce the V-shaped wake with its unique angle. The interference pattern at any moment in time would have contributions from all the waves that had already been generated. Kelvin accomplished this difficult task using a powerful mathematical principle that he discovered. But we can understand some of the main ideas if we consider one wavelength at a time.
Fig. 13.3 A: A supersonic aircraft generates a spherical shock at each point in its path that expands outward to a common conical front. B: As the plane flies on, the pattern seen from the plane always looks the same. The faster the plane flies, the smaller the angle of the V shape.
Unlike shock waves, which all travel at the unique speed of sound, gravity waves in water have wavelength-dependent phase speeds; the longer the wavelength, the faster the phase speed. Also, as we saw in chapter 2, each gravity wave can combine (that is, interfere) with waves of nearly the same wavelength to form a chain of wave groups, like beads on a string (see fig. 2.4).
Groups are important in this wake problem because they, not individual waves, transport energy away from the ship. Let’s agree to call the average of the wavelengths that form a group the “dominant” wavelength of that group. Then we can say that a group carries energy at a “group speed” that is half the phase speed of its dominant wave.
Now let’s consider the bow wave formed by a dominant wavelength. At each point in the ship’s path a circular wave group is born with this dominant wavelength and expands at its group speed. All the groups associated with this wavelength arrive at a common V-shaped front analogous to the supersonic shocks. Indeed, the ship wake of a dominant wavelength would look just like figure 13.3. But the angle of the wake would depend on the wavelength because the group speed varies with the dominant wavelength.
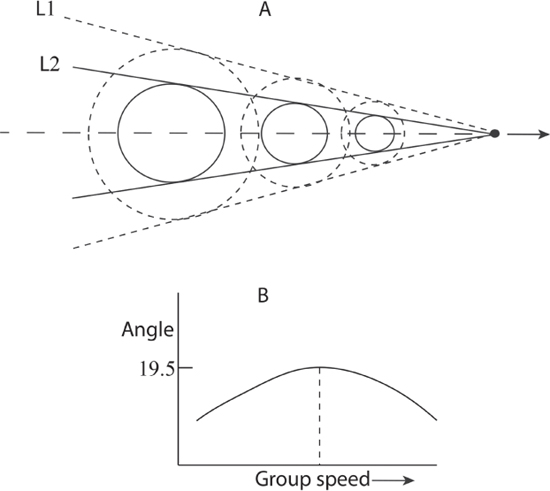
Fig. 13.4 A: A ship generates circular waves with different wavelengths at each point in its path. The waves expand at their corresponding group speeds. Therefore, each wavelength generates a front at a different angle. B: The half-angle of the wake varies with group speed, or, equivalently, wavelength. Wavelengths near a critical length interfere constructively to form a strong bow wave at 19.5 degrees from the ship direction.
In Figure 13.4A we see how groups with different dominant wavelengths (L1 and L2), born at the same moment, expand at different group speeds and generate V-shaped fronts at different angles. Why, then, do we see a unique angle of 19.5 degrees?
The reason is that nearly all the V-shaped wave fronts overlap and cancel out. Only a few fronts, corresponding to a narrow range of dominant wavelengths, survive. We can see this more clearly in figure 13.4B. It shows how the half-angle of the wake varies with group speed: the curve has a maximum at a half-angle of 19.5 degrees. Only wave groups with speeds that cluster near the flat maximum of the curve will travel together and overlap to create a high bow wave. All other wave groups create fronts at half-angles other than19 degrees and interfere destructively. (This simple explanation follows one published on the Internet by Professor Erkii Thuneberg University, Finland.)
The 19-degree angle is fixed; it does not depend on the speed of the ship or its shape. But the dominant wavelength that corresponds to the 19-degree angle does depend on the ship speed. In fact, it increases as the square of the speed. For example, at a ship speed of 2m/s (4.5mph) the dominant wavelength would be 0.9m, and at a speed of 10m/s (22.5mph) it would be 22.5m.
So far, I have discussed only the diverging V-shaped waves in the ship wake. As we have seen in figure 13.2, the complete pattern also includes transverse waves that cross the ship’s path at right angles. Their wavelengths are directly proportional to the square of the ship’s speed. So as before, the transverse waves will have wavelengths of about 0.9m at a ship speed of 2m/s and wavelengths of 22.5m at 10m/s.
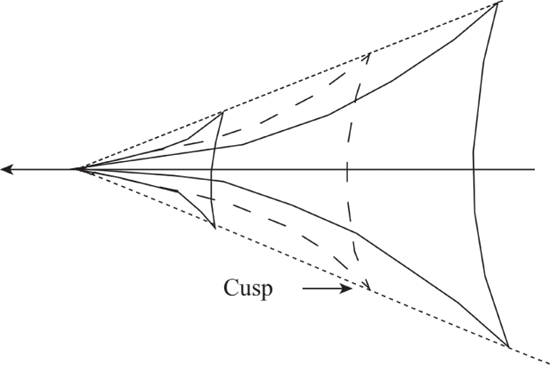
Kelvin determined that the waves generated at each moment of time form a wedge-shaped or triangular object, consisting of the two diverging V-shaped waves and a transverse wave. Figure 13.5 shows three wedges formed at three moments in time. The smallest is the most recent. The next larger was formed one period before and the largest two periods before. All three wedges in the figure are expanding uniformly, preserving their self-similar shape. This is the way the pattern evolves in time, preserving its overall shape.
The diverging waves and transverse waves meet at points that are called cusps, as shown in the figure. And it is at the cusps that prominent wavelets form along the V-shaped wake. The wavelets have larger heights along the V-shaped wake because of constructive interference of divergent and transverse waves. Each wavelet slopes away from the ship’s path at the fixed angle of 55 degrees.
Fig. 13.5 A ship generates transverse waves as well as diverging waves. Together, these waves form wedge-shaped patterns that expand in time as shown here. The crests (solid lines) alternate with the troughs (dashed lines).
A reality check is now in order. We’ve been discussing Kelvin’s ideal wake, in which a pointlike source generates a wake while moving over still water. The wake of a real ship with finite dimensions has a somewhat different pattern. Moreover, the stern of a real ship also generates a wave pattern that interacts with the bow waves. We won’t go into that subject, however. Instead, we turn to the practical subject of wave resistance and the struggles of ship builders to minimize this resistance.
A ship must push its way through the water, and that takes power. Moreover, the faster the ship plows ahead, the more power it requires. To double the ship’s speed, for example, the engines must deliver far more than twice the power. You have probably recognized this bald fact of life if you have listened to the engines on a speedboat. So to conserve fuel, especially at higher speeds, naval architects try to reduce the resistance a ship would encounter.
Three types of resistance are important. At low speeds the friction of the water rubbing the hull of the ship is the primary factor. At higher speeds the formation of waves in a wake becomes important. And at the highest speeds, the turbulence of the wake is the controlling factor. To distinguish “low” from “high” speed, experts now rely on the Froude number, F. It is a dimensionless number, equal to the ratio of ship speed to the phase speed of the gravity wave that has a wavelength equal to the ship’s length.
William Froude, a naval engineer for the British Admiralty discovered that this ratio is a good indicator of the size and type of resistance a ship encounters in sailing, at least in a calm sea. The way he went about measuring resistance makes a good story.
Froude, born in 1810, started his professional career around 1837 as a railroad surveyor and engineer. He gained notice by calculating the best curves and banking slopes for railroad tracks to prevent trains from tipping over at high speeds. Later, he was asked to look at the stability of ships, a request that caused him to become a naval architect for the rest of his life.
In the 1850s, the design of ship hulls depended solely on the experience and judgment of master shipwrights. There was very little experimental data available to guide a designer. And even the masters couldn’t predict the behavior of a ship in a high wind or a roiling sea. The state of the art was highly unsatisfactory to an engineer of Froude’s high standards. So Froude decided to investigate an apparently simple problem: how to minimize the rolling of a ship in heavy waves. Daniel Bernoulli, the famous Swiss mathematician and physicist, and member of the prolific Bernoulli family, had published a mathematical treatise on the subject in 1757. He concluded that the center of buoyancy (the geometric center of the underwater volume of the ship) should coincide with the center of gravity (the center of the entire mass of the ship).
Unfortunately, some of Bernoulli’s assumptions led to erroneous results. Other scientists of equal ability attempted to solve the problem, but with limited success. Froude preferred to proceed with experiments first and attempt an analysis only later. He had limited funds, but he was willing to spend them to gain some insight. He began by measuring the roll of small floats in the River Dart under varying conditions of wind and wave. A typical float was a toy boat with a mast that carried a swinging pendulum. He would observe the amplitude and period of a float’s pendulum and try to draw conclusions.
In 1859 he realized he needed a more controlled environment in which to conduct his experiments, so he and his son Robert built a long wave tank at his home. They fitted the tank with an oscillating paddle that allowed them to generate small waves with a chosen height and frequency. Then Froude built small ship models that they could subject to waves of different periods. Froude also varied the orientation of the model with respect to the wave fronts. With these arrangements he carried out long series of tests to determine the principles that govern the rolling of a ship. The important factors, he learned, were the positions of the centers of gravity and buoyancy, and the volume of water the ship displaced.
Froude analyzed his findings and explained them mathematically in terms of the physical forces acting on a ship. He realized he had made a significant advance in the subject and decided to publish them. But first he would expose them to the experts. So on March 1, 1861, he presented a summary of his work to the Royal Institute of Naval Architects. He received a warm response, and in the following years his work was gradually adopted by the professionals.
Encouraged by his success with ship models, Froude decided to investigate another problem facing the designer of ships: how to minimize the resistance a ship encounters in plowing through the water. The resistance was an important limitation on the maximum speed of a ship and also determined the power required to drive it. Are some hull designs more favorable, he wondered? How does the resistance vary with speed? At the time there was no mathematical theory that could provide answers, so Froude decided once again to take a purely empirical approach to the problem.
Between 1863 and 1869, in his effort to answer these questions, Froude built many models with different hull shapes and towed them in his home-built tank at constant speeds. He measured the resistance they met using an instrument of his own design. Gradually, Froude learned that the best way to determine the relationship between resistance and speed was to build two hulls with precisely the same shape but different sizes. He discovered that the resistance was the same for the two hulls if the towing speeds were proportional to the square root of their lengths. He called this relationship the “law of comparison.” This result led him to devise the dimensionless Froude number; the greater this number, the greater the resistance.
In 1867 he built two ship models (called the Swan and the Raven, both now displayed in the Science Museum in London) in three sizes: 3, 6, and 12 feet. He towed them with a steam launch in the River Dart and measured the tension on the tow rope. His tests confirmed the basic concepts in his law of comparison but revealed some difficulties in the actual calculations when scaling up a model at different speeds. The problem arose because the total resistance consists of two components, friction and wave formation, which vary differently with increasing speed. But Froude found an empirical solution to this problem. And in contradiction to a statement by John Scott Russell (see chapter 4), he demonstrated that the blunt prow of the Swan models produced less resistance than the sharp prow of the Raven models.
Froude realized he could apply these results to full-sized ships. If a model had precisely the same hull shape as the ship and differed only in size, he could measure the model’s resistance and scale it up to predict the ship’s resistance. For example, he could build a model the same shape as that of a projected ship at a scale of, say, 1 to 20. Next, he could tow the model at different speeds and measure its resistance by the tension on the tow rope. Then he could calculate the resistance of the real ship when the ship sailed at the equivalent speeds determined by the common Froude number.
With these significant results in hand, Froude applied in 1868 to the Admiralty for funds to build a larger tow tank and to carry out a two-year research program. His request was granted in 1870, and a large tank was completed at his home in Torquay nine years later. By 1871 Froude was ready for a full-scale trial at sea. Using a scale model he was able to predict the power requirements at different speeds for the ship HMS Greyhound. The tests were a resounding success for his methods. The investigation into the sinking of the HMS Captain, chaired (as we saw earlier) by Lord Kelvin, also strongly enhanced Froude’s reputation, as the investigating commission for the Admiralty concluded that the builders of this turret ship had violated Froude’s 1861 criteria for rolling.
Froude went on to test hundreds of models for the Admiralty. He showed that the resistance to ship motion is proportional to the square of the ship’s speed, to the square of its length, and to a coefficient, C, that rises steeply with increasing Froude number. At a Froude number of less than about 0.3, the resistance due to waves is small, and friction predominates. However, at a Froude number of about 0.35, the C coefficient increases as the sixth power of the Froude number, and wave resistance predominates. At a Froude number of 0.50 (a speed-to-length ratio of about 1.5), the ship makes large waves, and the resistance is at its greatest. The reason is that the ship’s length is then about half the transverse wavelength, so that waves from bow and stern overlap constructively. This condition determines the speed limit of efficient sailing, the so-called hull speed. So to conserve fuel, most ship captains prefer to sail at less than hull speed, where the Froude number is less than 0.45.
Back in Froude’s time, this hull speed seemed to limit any increases in speed of ships. But above the Froude number of 0.50, the C coefficient starts to decrease. That would allow new designs using very thin ends and long hulls to break through this seeming limit. Where efficiency is less of a concern, these new designs have allowed competitive kayakers, fast ferries, and catamarans to reach up to twice their hull speeds.
Froude’s method of optimizing hulls with models is still used today, despite the availability of numerical modeling. The U.S. Navy, for example, operates the David Taylor Model Basin at Carderock, Maryland. It is one of the largest facilities of its type in the world, with a towing tank 850m long and 15m wide. The tank is used to optimize the shapes of ship hulls for maximum speed, stability, or maneuverability.
William Froude and his son Robert also contributed to the design of ship propellers. In 1878 the elder Froude considered the forces acting on a segment of a propeller blade as it cuts through the water at different speeds and angles and derived formulas for the thrust a propeller delivers and the power it requires. His theory was flawed, however, because it ignored the effect of one segment on another.
Robert Froude took a different approach, which focused on the momentum of the water as it flowed past the propeller. He carried out experiments to test his ideas, with ambiguous results. Later, his theory was tested on air in a wind tunnel, and his prediction of final air speed proved to be fairly accurate. When the Froudes’ ideas were combined with corrections for the interference between blade segments, a reasonably accurate theory for a simple propeller was obtained. Modern designs of complex propellers depend on a quite different approach, in which the vortices in the flow are analyzed.
It is ironic that all the while William Froude was conducting his careful experiments to understand wave resistance, shipwrights had refined a ship design that minimized resistance and maximized speed. Mind you, the design was perfected purely by trial and error, without the benefit of experiments or theory.
In the 1840s, the English middle class developed a passion for tea. To supply the product, merchants wanted a small, fast ship that could commute between India and England with a small, precious cargo. The answer ship-wrights provided was the clipper ship. It was a three-masted, square-rigged ship with a narrow waist relative to its length. It carried a huge area of sail and displaced a relatively small volume of water. In other words, it packed plenty of propulsion power along with minimum drag.
The “extreme” clipper design originated in America in 1845; it was picked up and refined by the Dutch and the English. Clipper ships carried gold diggers to California in 1848 and Australia in 1851. Clippers were also used to transport opium from the Far East and mail around the world.
The clipper design reached its pinnacle with the Cutty Sark. She was built for the tea trade at Dumbarton, Scotland, and launched in November 1869. She measured 212 feet long, 36 feet wide and 21 feet deep. She was a slim lady indeed, with a length-to-beam ratio of 5.9 (most sailing ships of the time had ratios as small as 3). With a displacement of only 2,100 tons and a sail area of 32,000 square feet, the ship was really fast. She set a record of 73 days for the London-to-Sydney run and was capable of speeds as high as 17 knots, or 32km/h. In the 1880s she carried wool from Australia to London. She was the last of her breed, however, as the new merchant steamships could carry more cargo at comparable speeds.
The clipper design was a triumph of practical engineering for a definite purpose; it succeeded in spite of the lack of a theory of ship resistance. It was obvious to a shipwright that if you wanted speed above all else, you reduced the displacement, slimmed down the ship, and carried lots of sail. Why these measures actually worked was not explained until John Henry Michell took up the challenge in 1898.
Michell was a professor of mathematics at the University of Melbourne in Australia and the first Australian to be elected as a fellow to the prestigious Royal Society of London. In his famous paper “The Wave Resistance of a Ship,” Michell showed how to calculate the wave resistance of a “thin” ship, one whose width (beam) is very small compared to its length. He summarized his theory with a single complicated formula that involved all the parameters of the ship. His theory still yields useful results for vessels as different as racing shells, kayaks, and Navy destroyers.
In the 1980s, Ernest Tuck and his colleagues at the University of Adelaide, Australia, extended Michell’s theory to ships with smaller length-to-width ratios and showed how to optimize a design. As an example of the process, suppose we want to build a sailboat for racing competitions. We want the boat to be able to exceed a certain speed, to be certain of beating its competition. We already have in mind a boat of a certain hull shape and displacement (the weight of the water that the boat will displace when it is fully loaded). To achieve our desired speed we’d like to carry as much sail as the boat can safely handle, and that depends in part on the length of the boat. (It also depends on the depth of the keel, the heavy fin under the hull.) For any chosen length we have to adjust the width of the boat to maintain our chosen displacement; longer boats will also be thinner.
With all these constraints, only the length of the boat remains adjustable. So how long should the boat be to fit our requirements and also minimize the resistance or drag on the boat?
We know that the frictional drag on the boat increases with the hull’s wetted area (the area that is normally under water). If we increase the length of the boat and keep its displacement fixed, its wetted area will increase. That is, longer, thinner boats will have greater frictional resistance. But on the other hand, if we increase the length of the boat, we decrease the wave resistance. As we increase the length, holding the speed constant, the Froude number decreases, and the resistance coefficient decreases sharply.
So as we increase the length, the frictional resistance increases and the wave resistance decreases. At some length we achieve a minimum total resistance. We can calculate that optimum length with an extension of Michell’s theory.
The beautiful yachts that compete in transoceanic races are the top of the line, built with titanium masts and carbon-epoxy hulls, with towering sails and lots of electronic sensors. Their performance has been fine-tuned by a process similar to the one just described. As an example consider the Open 60, a class of 18-m yachts designed to compete in the Vendee Globe races. The Vendee Globe is a nonstop, single-handed yacht race around the world that has been held every four years since 1992. The usual course begins at Les Sables-d’Olonne in France, runs down the Atlantic coast and around the Cape of Good Hope, and then rounds Antarctica in the Roaring Forties or Fifties. The yachts then take a turn around Cape Horn and head home to France, for a total distance of more than 40,000km.
The most exciting and dangerous leg of the course is around Antarctica, where gale-force winds and towering waves are the rule. A sailor has to be tough, resourceful, and skillful. Above all he must be able to rely on his yacht.
The winner in winter 2008–9 was Michel Desjoyeaux, who sailed his Foncia around the world in 84 days and 3 hours, beating his previous record win in 2000–2001 by 9 days. That corresponds to an average speed of 20km/h, or 12mi/h. “I had a few problems,” Michel said casually at his homecoming interview. “I almost lost my bowsprit and rudders and some stanchions. I didn’t sit around crying about what had happened. Once it happens, it’s in the past and you move on.”
Like all yachts that compete in the Vendee Globe, the Foncia conformed to a standard formula, the Open 60 rule, devised by the International Monohull Open Class Association. The formula constrains a combination of length, breadth, draft, and displacement, while still allowing the designer some latitude with each parameter. A typical Open 60 yacht has a length of 18.3m, a beam of 5.7m, a draft of 4.5m, and a displacement of 8 metric tons. So it is far from being a “thin” ship in the sense used by John Henry Michell. Maximum speed has been compromised for resistance to capsizing, an important consideration in the Roaring Forties. Nevertheless, such a boat can be designed numerically and then tested with models, much as Froude did in the nineteenth century.
There are other ways to reduce the drag on a ship, aside from the ones I’ve mentioned. One way is to reduce wave generation by shaping the prow of the ship. Two extremes have been employed—a thin, sharp prow or a bulbous prow. The thin, sharp prow will cut through the water more easily, while the bulb of a bulbous prow is a blunt projection under the water that suppresses the formation of long gravity waves. Each method has its advantages at different speeds.
Another way of reducing drag is to lift some part of the ship out of the water. A speedboat that lifts its bow and “planes” at high speed is an example. Of course, in this case the wake becomes turbulent, and the increased energy losses tend to offset the gains. A catamaran or a hydrofoil achieves the same result at relatively high speeds by relying on underwater pontoons to support the main part of the craft. In particular, the low drag and lack of wake of the pontoons deliver high performance because much of the weight is below the surface of the water, while the struts that hold the catamaran deck above the water provide minimal wave resistance at the water-air boundary.
The most extreme solution to drag is the hovercraft, which floats entirely out of the water, supported only by air pressure. Here, the high power required to support the craft cancels much of the gains achieved in zero drag. It also cannot operate when ocean waves would cause loss of air pressure.
Recently, dolphins have become a topic of discussion and study among hull designers after it was estimated that they ought to have seven times as much muscle power as they actually have in order to swim as swiftly as they do, based on the hull design equations. How could this paradox be explained? Although no definitive answers have been reached, some key studies show that dolphins have minimized wave resistance through their overall sleek design and through some skin characteristics. A dolphin’s skin is overall quite smooth and tough but not rigid like a boat hull. The dolphin’s body and particularly its fins also contain ridges which seem to exist where turbulent flows might affect the dolphin’s speed; the animal may use the ridges to control the turbulent flow around these parts of its body and thus reduce drag significantly.
The complete opposite to a hovercraft is a submarine. When submerged, a sub is subjected only to frictional drag, even at speeds that would generate substantial wakes if the sub were at the surface. So in principle a civilian submarine could make an efficient passenger vessel, capable of cruising at a steady 40 knots. It would have the added advantages of revealing the wonders of the deep to its passengers and avoiding storms at the surface. (Remember Captain Nemo’s Nautilus?) Perhaps we’ll see such craft in the future, offering a different experience in crossing an ocean.