
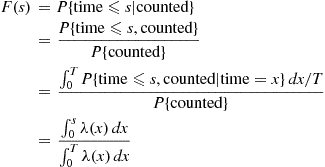
Method 2 Conditional Distribution of the Arrival Times
Recall the result for a Poisson process having rate  that given the number of events by time
that given the number of events by time  the set of event times are independent and identically distributed uniform
the set of event times are independent and identically distributed uniform  random variables. Now suppose that each of these events is independently counted with a probability that is equal to
random variables. Now suppose that each of these events is independently counted with a probability that is equal to  when the event occurred at time
when the event occurred at time  . Hence, given the number of counted events, it follows that the set of times of these counted events are independent with a common distribution given by
. Hence, given the number of counted events, it follows that the set of times of these counted events are independent with a common distribution given by  , where
, where
The preceding (somewhat heuristic) argument thus shows that given  events of a nonhomogeneous Poisson process by time
events of a nonhomogeneous Poisson process by time  the
the  event times are independent with a common density function
event times are independent with a common density function
 (11.10)
(11.10)Since  , the number of events by time
, the number of events by time  , is Poisson distributed with mean
, is Poisson distributed with mean  , we can simulate the nonhomogeneous Poisson process by first simulating
, we can simulate the nonhomogeneous Poisson process by first simulating  and then simulating
and then simulating  random variables from the density function of (11.10).
random variables from the density function of (11.10).
Example 11.12
If  , then we can simulate the first
, then we can simulate the first  time units of the nonhomogeneous Poisson process by first simulating
time units of the nonhomogeneous Poisson process by first simulating  , a Poisson random variable having mean
, a Poisson random variable having mean  , and then simulating
, and then simulating  random variables having distribution
random variables having distribution
Random variables having the preceding distribution either can be simulated by use of the inverse transform method (since  ) or by noting that
) or by noting that  is the distribution function of
is the distribution function of  when
when  and
and  are independent random numbers. ■
are independent random numbers. ■
If the distribution function specified by Equation (11.10) is not easily invertible, we can always simulate from (11.10) by using the rejection method where we either accept or reject simulated values of uniform  random variables. That is, let
random variables. That is, let  . Then
. Then

where  is a bound on
is a bound on  . Hence, the rejection method is to generate random numbers
. Hence, the rejection method is to generate random numbers  and
and  then accept
then accept  if
if
or, equivalently, if

Method 3 Simulating the Event Times
The third method we shall present for simulating a nonhomogeneous Poisson process having intensity function  is probably the most basic approach—namely, to simulate the successive event times. So let
is probably the most basic approach—namely, to simulate the successive event times. So let  denote the event times of such a process. As these random variables are dependent we will use the conditional distribution approach to simulation. Hence, we need the conditional distribution of
denote the event times of such a process. As these random variables are dependent we will use the conditional distribution approach to simulation. Hence, we need the conditional distribution of  given
given  .
.
To start, note that if an event occurs at time  then, independent of what has occurred prior to
then, independent of what has occurred prior to  , the time until the next event has the distribution
, the time until the next event has the distribution  given by
given by
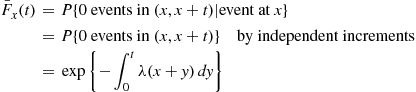
Differentiation yields that the density corresponding to  is
is

implying that the hazard rate function of  is
is
We can now simulate the event times  by simulating
by simulating  from
from  ; then if the simulated value of
; then if the simulated value of  is
is  , simulate
, simulate  by adding
by adding  to a value generated from
to a value generated from  , and if this sum is
, and if this sum is  simulate
simulate  by adding
by adding  to a value generated from
to a value generated from  , and so on. The method used to simulate from these distributions should depend, of course, on the form of these distributions. However, it is interesting to note that if we let
, and so on. The method used to simulate from these distributions should depend, of course, on the form of these distributions. However, it is interesting to note that if we let  be such that
be such that  and use the hazard rate method to simulate, then we end up with the approach of Method 1 (we leave the verification of this fact as an exercise). Sometimes, however, the distributions
and use the hazard rate method to simulate, then we end up with the approach of Method 1 (we leave the verification of this fact as an exercise). Sometimes, however, the distributions  can be easily inverted and so the inverse transform method can be applied.
can be easily inverted and so the inverse transform method can be applied.
Example 11.13
Suppose that  . Then
. Then

Hence,

and so
We can, therefore, simulate the successive event times  by generating
by generating  and then setting
and then setting
and, in general,

11.5.2 Simulating a Two-Dimensional Poisson Process
A point process consisting of randomly occurring points in the plane is said to be a two-dimensional Poisson process having rate  if
if
(a) the number of points in any given region of area  is Poisson distributed with mean
is Poisson distributed with mean  ; and
; and
(b) the numbers of points in disjoint regions are independent.
For a given fixed point O in the plane, we now show how to simulate events occurring according to a two-dimensional Poisson process with rate  in a circular region of radius
in a circular region of radius  centered about
centered about  . Let
. Let  , denote the distance between
, denote the distance between  and its
and its  th nearest Poisson point, and let
th nearest Poisson point, and let  denote the circle of radius
denote the circle of radius  centered at
centered at  . Then
. Then

Also, with  denoting the region between
denoting the region between  and
and  :
:
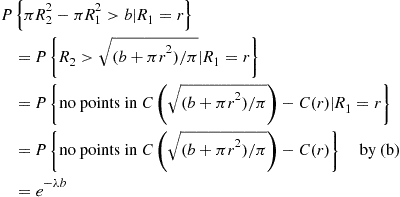
In fact, the same argument can be repeated to obtain the following.
Proposition 11.6
With  ,
,

are independent exponentials with rate  .
.
In other words, the amount of area that needs to be traversed to encompass a Poisson point is exponential with rate  . Since, by symmetry, the respective angles of the Poisson points are independent and uniformly distributed over
. Since, by symmetry, the respective angles of the Poisson points are independent and uniformly distributed over  , we thus have the following algorithm for simulating the Poisson process over a circular region of radius
, we thus have the following algorithm for simulating the Poisson process over a circular region of radius  about
about  :
:
Step 1 Generate independent exponentials with rate 1,  , stopping at
, stopping at

Step 2 If  , stop. There are no points in
, stop. There are no points in  . Otherwise, for
. Otherwise, for  , set
, set

Step 3 Generate independent uniform  random variables
random variables  .
.
Step 4 Return the  Poisson points in
Poisson points in  whose polar coordinates are
whose polar coordinates are

The preceding algorithm requires, on average,  exponentials and an equal number of uniform random numbers. Another approach to simulating points in
exponentials and an equal number of uniform random numbers. Another approach to simulating points in  is to first simulate
is to first simulate  , the number of such points, and then use the fact that, given
, the number of such points, and then use the fact that, given  , the points are uniformly distributed in
, the points are uniformly distributed in  . This latter procedure requires the simulation of
. This latter procedure requires the simulation of  , a Poisson random variable with mean
, a Poisson random variable with mean  ; we must then simulate
; we must then simulate  uniform points on
uniform points on  , by simulating
, by simulating  from the distribution
from the distribution  (see Exercise 25) and
(see Exercise 25) and  from uniform
from uniform  and must then sort these
and must then sort these  uniform values in increasing order of
uniform values in increasing order of  . The main advantage of the first procedure is that it eliminates the need to sort.
. The main advantage of the first procedure is that it eliminates the need to sort.
The preceding algorithm can be thought of as the fanning out of a circle centered at  with a radius that expands continuously from 0 to
with a radius that expands continuously from 0 to  . The successive radii at which Poisson points are encountered is simulated by noting that the additional area necessary to encompass a Poisson point is always, independent of the past, exponential with rate
. The successive radii at which Poisson points are encountered is simulated by noting that the additional area necessary to encompass a Poisson point is always, independent of the past, exponential with rate  . This technique can be used to simulate the process over noncircular regions. For instance, consider a nonnegative function
. This technique can be used to simulate the process over noncircular regions. For instance, consider a nonnegative function  , and suppose we are interested in simulating the Poisson process in the region between the
, and suppose we are interested in simulating the Poisson process in the region between the  -axis and
-axis and  with
with  going from 0 to
going from 0 to  (see Figure 11.4). To do so we can start at the left-hand end and fan vertically to the right by considering the successive areas
(see Figure 11.4). To do so we can start at the left-hand end and fan vertically to the right by considering the successive areas  . Now if
. Now if  denote the successive projections of the Poisson points on the
denote the successive projections of the Poisson points on the  -axis, then analogous to Proposition 11.6, it will follow that (with
-axis, then analogous to Proposition 11.6, it will follow that (with  )
)  , will be independent exponentials with rate 1. Hence, we should simulate
, will be independent exponentials with rate 1. Hence, we should simulate  , independent exponentials with rate 1, stopping at
, independent exponentials with rate 1, stopping at

and determine  by
by
If we now simulate  —independent uniform
—independent uniform  random numbers—then as the projection on the
random numbers—then as the projection on the  -axis of the Poisson point whose
-axis of the Poisson point whose  -coordinate is
-coordinate is  is uniform on (0,
is uniform on (0,  ), it follows that the simulated Poisson points in the interval are
), it follows that the simulated Poisson points in the interval are  .
.

Of course, the preceding technique is most useful when  is regular enough so that the foregoing equations can be solved for the
is regular enough so that the foregoing equations can be solved for the  . For instance, if
. For instance, if  (and so the region of interest is a rectangle), then
(and so the region of interest is a rectangle), then

and the Poisson points are

11.6 Variance Reduction Techniques
Let  have a given joint distribution, and suppose we are interested in computing
have a given joint distribution, and suppose we are interested in computing

where  is some specified function. It is often the case that it is not possible to analytically compute the preceding, and when such is the case we can attempt to use simulation to estimate
is some specified function. It is often the case that it is not possible to analytically compute the preceding, and when such is the case we can attempt to use simulation to estimate  . This is done as follows: Generate
. This is done as follows: Generate  having the same joint distribution as
having the same joint distribution as  and set
and set

Now, simulate a second set of random variables (independent of the first set)  having the distribution of
having the distribution of  and set
and set

Continue this until you have generated  (some predetermined number) sets, and so have also computed
(some predetermined number) sets, and so have also computed  . Now,
. Now,  are independent and identically distributed random variables each having the same distribution of
are independent and identically distributed random variables each having the same distribution of  . Thus, if we let
. Thus, if we let  denote the average of these
denote the average of these  random variables—that is,
random variables—that is,

then
Hence, we can use  as an estimate of
as an estimate of  . As the expected square of the difference between
. As the expected square of the difference between  and
and  is equal to the variance of
is equal to the variance of  , we would like this quantity to be as small as possible. In the preceding situation,
, we would like this quantity to be as small as possible. In the preceding situation,  , which is usually not known in advance but must be estimated from the generated values
, which is usually not known in advance but must be estimated from the generated values  . We now present three general techniques for reducing the variance of our estimator.
. We now present three general techniques for reducing the variance of our estimator.
11.6.1 Use of Antithetic Variables
In the preceding situation, suppose that we have generated  and
and  , identically distributed random variables having mean
, identically distributed random variables having mean  . Now,
. Now,
Hence, it would be advantageous (in the sense that the variance would be reduced) if  and
and  rather than being independent were negatively correlated. To see how we could arrange this, let us suppose that the random variables
rather than being independent were negatively correlated. To see how we could arrange this, let us suppose that the random variables  are independent and, in addition, that each is simulated via the inverse transform technique. That is,
are independent and, in addition, that each is simulated via the inverse transform technique. That is,  is simulated from
is simulated from  where
where  is a random number and
is a random number and  is the distribution of
is the distribution of  . Hence,
. Hence,  can be expressed as
can be expressed as

Now, since  is also uniform over
is also uniform over  whenever
whenever  is a random number (and is negatively correlated with
is a random number (and is negatively correlated with  ) it follows that
) it follows that  defined by
defined by

will have the same distribution as  . Hence, if
. Hence, if  and
and  were negatively correlated, then generating
were negatively correlated, then generating  by this means would lead to a smaller variance than if it were generated by a new set of random numbers. (In addition, there is a computational savings since rather than having to generate
by this means would lead to a smaller variance than if it were generated by a new set of random numbers. (In addition, there is a computational savings since rather than having to generate  additional random numbers, we need only subtract each of the previous
additional random numbers, we need only subtract each of the previous  from 1.) The following theorem will be the key to showing that this technique—known as the use of antithetic variables—will lead to a reduction in variance whenever
from 1.) The following theorem will be the key to showing that this technique—known as the use of antithetic variables—will lead to a reduction in variance whenever  is a monotone function.
is a monotone function.
Theorem 11.1
If  are independent, then, for any increasing functions
are independent, then, for any increasing functions  and
and  of
of  variables,
variables,
 (11.11)
(11.11)where  .
.
Proof
The proof is by induction on  . To prove it when
. To prove it when  , let
, let  and
and  be increasing functions of a single variable. Then, for any
be increasing functions of a single variable. Then, for any  and
and  ,
,

since if  then both factors are nonnegative (nonpositive). Hence, for any random variables
then both factors are nonnegative (nonpositive). Hence, for any random variables  and
and  ,
,

implying that

or, equivalently,

If we suppose that  and
and  are independent and identically distributed, as in this case, then
are independent and identically distributed, as in this case, then

and so we obtain the result when  .
.
So assume that (11.11) holds for  variables, and now suppose that
variables, and now suppose that  are independent and
are independent and  and
and  are increasing functions. Then
are increasing functions. Then

Hence,

and, upon taking expectations of both sides,

The last inequality follows because  and
and  are both increasing functions of
are both increasing functions of  , and so, by the result for
, and so, by the result for  ,
,

Corollary 11.7
If  are independent, and
are independent, and  is either an increasing or decreasing function, then
is either an increasing or decreasing function, then

Proof
Suppose  is increasing. As
is increasing. As  is increasing in
is increasing in  , then, from Theorem 11.1,
, then, from Theorem 11.1,

When  is decreasing just replace
is decreasing just replace  by its negative. ■
by its negative. ■
Since  is increasing in
is increasing in  (as
(as  , being a distribution function, is increasing) it follows that
, being a distribution function, is increasing) it follows that  is a monotone function of
is a monotone function of  whenever
whenever  is monotone. Hence, if
is monotone. Hence, if  is monotone the antithetic variable approach of twice using each set of random numbers
is monotone the antithetic variable approach of twice using each set of random numbers  by first computing
by first computing  and then
and then  will reduce the variance of the estimate of
will reduce the variance of the estimate of  . That is, rather than generating
. That is, rather than generating  sets of
sets of  random numbers, we should generate
random numbers, we should generate  sets and use each set twice.
sets and use each set twice.
Example 11.14
Simulating the Reliability Function
Consider a system of  components in which component
components in which component  , independently of other components, works with probability
, independently of other components, works with probability  . Letting
. Letting
suppose there is a monotone structure function  such that
such that

We are interested in using simulation to estimate

Now, we can simulate the  by generating uniform random numbers
by generating uniform random numbers  and then setting
and then setting

Hence, we see that

where  is a decreasing function of
is a decreasing function of  . Hence,
. Hence,

and so the antithetic variable approach of using  to generate both
to generate both  and
and  results in a smaller variance than if an independent set of random numbers was used to generate the second
results in a smaller variance than if an independent set of random numbers was used to generate the second  . ■
. ■
Example 11.15
Simulating a Queueing System
Consider a given queueing system, let  denote the delay in queue of the
denote the delay in queue of the  th arriving customer, and suppose we are interested in simulating the system so as to estimate
th arriving customer, and suppose we are interested in simulating the system so as to estimate

Let  denote the first
denote the first  interarrival times and
interarrival times and  the first
the first  service times of this system, and suppose these random variables are all independent. Now in most systems
service times of this system, and suppose these random variables are all independent. Now in most systems  will be a function of
will be a function of  —say,
—say,

Also,  will usually be increasing in
will usually be increasing in  and decreasing in
and decreasing in  . If we use the inverse transform method to simulate
. If we use the inverse transform method to simulate  —say,
—say,  where
where  are independent uniform random numbers—then we may write
are independent uniform random numbers—then we may write

where  is increasing in its variates. Hence, the antithetic variable approach will reduce the variance of the estimator of
is increasing in its variates. Hence, the antithetic variable approach will reduce the variance of the estimator of  . (Thus, we would generate
. (Thus, we would generate  and set
and set  and
and  for the first run, and
for the first run, and  and
and  for the second.) As all the
for the second.) As all the  and
and  are independent, however, this is equivalent to setting
are independent, however, this is equivalent to setting  in the first run and using
in the first run and using  for
for  and
and  for
for  in the second. ■
in the second. ■
11.6.2 Variance Reduction by Conditioning
Let us start by recalling (see Proposition 3.1) the conditional variance formula
 (11.12)
(11.12)Now suppose we are interested in estimating  by simulating
by simulating  and then computing
and then computing  . Now, if for some random variable
. Now, if for some random variable  we can compute
we can compute  then, as
then, as  , it follows from the conditional variance formula that
, it follows from the conditional variance formula that

implying, since  , that
, that  is a better estimator of
is a better estimator of  than is
than is  .
.
In many situations, there are a variety of  that can be conditioned on to obtain an improved estimator. Each of these estimators
that can be conditioned on to obtain an improved estimator. Each of these estimators  will have mean
will have mean  and smaller variance than does the raw estimator
and smaller variance than does the raw estimator  . We now show that for any choice of weights
. We now show that for any choice of weights  is also an improvement over
is also an improvement over  .
.



Proof
The proof of (a) is immediate. To prove (b), let  denote an integer valued random variable independent of all the other random variables under consideration and such that
denote an integer valued random variable independent of all the other random variables under consideration and such that

Applying the conditional variance formula twice yields

Example 11.16
Consider a queueing system having Poisson arrivals and suppose that any customer arriving when there are already  others in the system is lost. Suppose that we are interested in using simulation to estimate the expected number of lost customers by time
others in the system is lost. Suppose that we are interested in using simulation to estimate the expected number of lost customers by time  . The raw simulation approach would be to simulate the system up to time
. The raw simulation approach would be to simulate the system up to time  and determine
and determine  , the number of lost customers for that run. A better estimate, however, can be obtained by conditioning on the total time in
, the number of lost customers for that run. A better estimate, however, can be obtained by conditioning on the total time in  that the system is at capacity. Indeed, if we let
that the system is at capacity. Indeed, if we let  denote the time in
denote the time in  that there are
that there are  in the system, then
in the system, then

where  is the Poisson arrival rate. Hence, a better estimate for
is the Poisson arrival rate. Hence, a better estimate for  than the average value of
than the average value of  over all simulation runs can be obtained by multiplying the average value of
over all simulation runs can be obtained by multiplying the average value of  per simulation run by
per simulation run by  . If the arrival process were a nonhomogeneous Poisson process, then we could improve over the raw estimator
. If the arrival process were a nonhomogeneous Poisson process, then we could improve over the raw estimator  by keeping track of those time periods for which the system is at capacity. If we let
by keeping track of those time periods for which the system is at capacity. If we let  denote the time intervals in
denote the time intervals in  in which there are
in which there are  in the system, then
in the system, then
where  is the intensity function of the nonhomogeneous Poisson arrival process. The use of the right side of the preceding would thus lead to a better estimate of
is the intensity function of the nonhomogeneous Poisson arrival process. The use of the right side of the preceding would thus lead to a better estimate of  than the raw estimator
than the raw estimator  . ■
. ■
Example 11.17
Suppose that we wanted to estimate the expected sum of the times in the system of the first  customers in a queueing system. That is, if
customers in a queueing system. That is, if  is the time that the
is the time that the  th customer spends in the system, then we are interested in estimating
th customer spends in the system, then we are interested in estimating

Let  denote the “state of the system” at the moment at which the
denote the “state of the system” at the moment at which the  th customer arrives. It can be shown§ that for a wide class of models the estimator
th customer arrives. It can be shown§ that for a wide class of models the estimator  has (the same mean and) a smaller variance than the estimator
has (the same mean and) a smaller variance than the estimator  . (It should be noted that whereas it is immediate that
. (It should be noted that whereas it is immediate that  has smaller variance than
has smaller variance than  , because of the covariance terms involved it is not immediately apparent that
, because of the covariance terms involved it is not immediately apparent that  has smaller variance than
has smaller variance than  .) For instance, in the model
.) For instance, in the model 

where  is the number in the system encountered by the
is the number in the system encountered by the  th arrival and
th arrival and  is the mean service time; the result implies that
is the mean service time; the result implies that  is a better estimate of the expected total time in the system of the first
is a better estimate of the expected total time in the system of the first  customers than is the raw estimator
customers than is the raw estimator  . ■
. ■
Example 11.18
Estimating the Renewal Function by Simulation
Consider a queueing model in which customers arrive daily in accordance with a renewal process having interarrival distribution  . However, suppose that at some fixed time
. However, suppose that at some fixed time  , for instance 5 P.M., no additional arrivals are permitted and those customers that are still in the system are serviced. At the start of the next and each succeeding day customers again begin to arrive in accordance with the renewal process. Suppose we are interested in determining the average time that a customer spends in the system. Upon using the theory of renewal reward processes (with a cycle starting every
, for instance 5 P.M., no additional arrivals are permitted and those customers that are still in the system are serviced. At the start of the next and each succeeding day customers again begin to arrive in accordance with the renewal process. Suppose we are interested in determining the average time that a customer spends in the system. Upon using the theory of renewal reward processes (with a cycle starting every  time units), it can be shown that
time units), it can be shown that

where  is the expected number of renewals in (0,
is the expected number of renewals in (0,  ).
).
If we were to use simulation to estimate the preceding quantity, a run would consist of simulating a single day, and as part of a simulation run, we would observe the quantity  , the number of arrivals by time
, the number of arrivals by time  . Since
. Since  , the natural simulation estimator of
, the natural simulation estimator of  would be the average (over all simulated days) value of
would be the average (over all simulated days) value of  obtained. However, Var
obtained. However, Var is, for large
is, for large  , proportional to
, proportional to  (its asymptotic form being
(its asymptotic form being  , where
, where  is the variance and
is the variance and  the mean of the interarrival distribution
the mean of the interarrival distribution  ), and so, for large
), and so, for large  , the variance of our estimator would be large. A considerable improvement can be obtained by using the analytic formula (see Section 7.3)
, the variance of our estimator would be large. A considerable improvement can be obtained by using the analytic formula (see Section 7.3)
 (11.13)
(11.13)
where  denotes the time from
denotes the time from  until the next renewal—that is, it is the excess life at
until the next renewal—that is, it is the excess life at  . Since the variance of
. Since the variance of  does not grow with
does not grow with  (indeed, it converges to a finite value provided the moments of
(indeed, it converges to a finite value provided the moments of  are finite), it follows that for
are finite), it follows that for  large, we would do much better by using the simulation to estimate
large, we would do much better by using the simulation to estimate  and then using Equation (11.13) to estimate
and then using Equation (11.13) to estimate  .
.
However, by employing conditioning, we can improve further on our estimate of  . To do so, let
. To do so, let  denote the age of the renewal process at time
denote the age of the renewal process at time  —that is, it is the time at
—that is, it is the time at  since the last renewal. Then, rather than using the value of
since the last renewal. Then, rather than using the value of  , we can reduce the variance by considering
, we can reduce the variance by considering  . Now, knowing that the age at
. Now, knowing that the age at  is equal to
is equal to  is equivalent to knowing that there was a renewal at time
is equivalent to knowing that there was a renewal at time  and the next interarrival time
and the next interarrival time  is greater than
is greater than  . Since the excess at
. Since the excess at  will equal
will equal  (see Figure 11.5), it follows that
(see Figure 11.5), it follows that
which can be numerically evaluated if necessary.
As an illustration of the preceding note that if the renewal process is a Poisson process with rate  , then the raw simulation estimator
, then the raw simulation estimator  will have variance
will have variance  ; since
; since  will be exponential with rate
will be exponential with rate  , the estimator based on (11.13) will have variance
, the estimator based on (11.13) will have variance  . On the other hand, since
. On the other hand, since  will be independent of
will be independent of  (and
(and  ), it follows that the variance of the improved estimator
), it follows that the variance of the improved estimator  is 0. That is, conditioning on the age at time
is 0. That is, conditioning on the age at time  yields, in this case, the exact answer. ■
yields, in this case, the exact answer. ■
Example 11.19
Consider the  queueing system where customers arrive in accordance with a Poisson process with rate
queueing system where customers arrive in accordance with a Poisson process with rate  to a single server having service distribution
to a single server having service distribution  with mean
with mean  . Suppose that, for a specified time
. Suppose that, for a specified time  , the server will take a break at the first time
, the server will take a break at the first time  at which the system is empty. That is, if
at which the system is empty. That is, if  is the number of customers in the system at time
is the number of customers in the system at time  , then the server will take a break at time
, then the server will take a break at time

To efficiently use simulation to estimate  , generate the system to time
, generate the system to time  ; let
; let  denote the remaining service time of the customer in service at time
denote the remaining service time of the customer in service at time  , and let
, and let  equal the number of customers waiting in queue at time
equal the number of customers waiting in queue at time  . (Note that
. (Note that  is equal to
is equal to  if
if  , and
, and  .) Now, with
.) Now, with  equal to the number of customers that arrive in the remaining service time
equal to the number of customers that arrive in the remaining service time  , it follows that if
, it follows that if  and
and  , then the additional amount of time from
, then the additional amount of time from  until the server can take a break is equal to the amount of time that it takes until the system, starting with
until the server can take a break is equal to the amount of time that it takes until the system, starting with  customers, becomes empty. Because this is equal to the sum of
customers, becomes empty. Because this is equal to the sum of  busy periods, it follows from Section 8.5.3 that
busy periods, it follows from Section 8.5.3 that

Consequently,

Thus, rather than using the generated value of  as the estimator from a simulation run, it is better to stop the simulation at time
as the estimator from a simulation run, it is better to stop the simulation at time  and use the estimator
and use the estimator  . ■
. ■


11.6.3 Control Variates
Again suppose we want to use simulation to estimate  where
where  . But now suppose that for some function
. But now suppose that for some function  the expected value of
the expected value of  is known—say,
is known—say,  . Then for any constant
. Then for any constant  we can also use
we can also use

as an estimator of  . Now,
. Now,