9.3. Elementary Lubrication Theory
The exact viscous flow solutions for ideal geometries presented in the prior section indicate that a linear or simply varying velocity profile is a robust solution for flow within a confined space. This observation has been developed into the theory of lubrication, which provides approximate solutions to the viscous flow equations when the geometry is not ideal but at least one transverse flow dimension is small. The elementary features of lubrication theory are presented here because of its connection to the exact solutions described in Section 9.2, especially the Couette and Poiseuille flow solutions. Plus, the development of approximate equations in this section parallels that necessary for the boundary layer approximation (see Section 10.1).
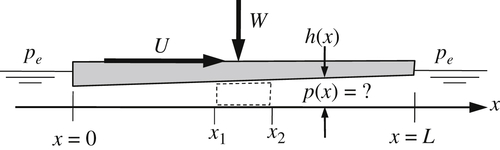
The economic importance of lubrication with viscous fluids is hard to overestimate, and lubrication theory covers the mathematical formulation and analysis of such flows. The purpose of this section is to develop the most elementary equations of lubrication theory and illustrate some interesting phenomena that occur in viscous constant-density flows where the flow’s boundaries or confining walls are close together, but not precisely parallel, and their motion is mildly unsteady. For simplicity, consider two spatial dimensions, x and y, where the primary flow direction, x, lies along a narrow passage with gap height h(x,t) (see Figure 9.8). The length L of this passage is presumed to be large compared to h so that viscous and pressure forces are the primary terms in any fluid-momentum balance. If the passage is curved, this will not influence the analysis as long as the radius of curvature is much larger than the gap height h. The field equations are (4.10) and (9.1) for the horizontal u, and vertical v velocity components, and the pressure p in the fluid:

Figure 9.8 Nearly parallel flow of a viscous fluid having a film thickness of h(x,t) above a flat stationary surface.
 (7.2)
(7.2)
 (9.13a, 9.13b)
(9.13a, 9.13b)
Here, the boundary conditions are u = U0(t) on y = 0 and u = Uh(t) on y = h(x,t), and the pressure is presumed to be time dependent as well.
To determine which terms are important and which may be neglected when the passage is narrow, recast these equations in terms of dimensionless variables:
 (9.14)
(9.14)
where U is a characteristic velocity of the flow, Pa is atmospheric pressure, and ε = h/L is the passage’s fineness ratio (the inverse of its aspect ratio). The goal of this effort is to find a set of approximate equations that are valid for common lubrication geometries where ε ≪ 1. Because of the passage geometry, the magnitude of v is expected to be much less than the magnitude of u and gradients along the passage, ∂/∂x ∼ 1/L, are expected to be much smaller than gradients across it, ∂/∂y ∼ 1/h. These expectations have been incorporated into the dimensionless scaling (9.14). Combining (7.2), (9.13), and (9.14) leads to the following dimensionless equations:
 (9.15)
(9.15)
 (9.16a)
(9.16a)
 (9.16b)
(9.16b)
where ReL = ρUL/μ, and Λ = μUL/Pah2 is the ratio of the viscous and pressure forces on a fluid element; it is sometimes called the bearing number. All the dimensionless derivative terms should be of order unity when the scaling (9.14) is correct. Thus, possible simplifying approximations are based on the size of the dimensionless coefficients of the various terms. The scaled two-dimensional continuity equation (9.15) does not contain any dimensionless coefficients so mass must be conserved without approximation. The two scaled momentum equations (9.16) contain ε, ReL, and Λ. For the present purposes, Λ must be considered to be near unity, ReL must be finite, and ε ≪ 1. When ε2ReL ≪ 1, the left side and the middle term on the right side of (9.16a) may be ignored. In (9.16b) the pressure derivative is the only term not multiplied by ε. Therefore, the momentum equations can be approximately simplified to:
 (9.17a, 9.17b)
(9.17a, 9.17b)
when ε2ReL → 0. As a numerical example of this approximation, ε2ReL = 0.001 for room temperature flow of common 30-weight oil with ν ≈ 4 × 10–4 m2/s within a 0.1 mm gap between two 25-cm-long surfaces moving with a differential speed of 10 m/s. When combined with a statement of conservation of mass, the equations (9.17) are the simplest form of the lubrication approximation (the zeroth-order approximation), and these equations are readily extended to two-dimensional gap-thickness variations (see Exercise 9.23). Interestingly, the approximations leading to (9.17) eliminated both the unsteady and the advective fluid acceleration terms from (9.16). This occurs because the flow's time scale was assumed to be L/U. When there is an externally imposed time scale, τ (the period of a mechanical oscillation for example), the additional requirement ρh2/μτ ≪ 1 is needed for the validity of (9.17) (see Exercise 9.16). Thus, time is typically still an independent variable in lubrication-flow analysis even though it does not explicitly appear in (9.16) or (9.17).
A generic solution to (9.17) is readily produced by repeating the steps leading to (9.5). Equation (9.17b) implies that p is not a function of y, so (9.16a) can be integrated twice to produce:
 (9.18)
(9.18)
where A and B might be functions of x and t but not y. Applying the boundary conditions mentioned earlier allows A and B to be evaluated, and the fluid velocity within the gap is found to be:
 (9.19)
(9.19)
The basic result here is that balancing viscous and pressure forces leads to a velocity profile that is parabolic in the cross-stream direction. While (9.19) represents a significant simplification of the two momentum equations (9.13), it is not a complete solution because the pressure p(x,t) within the gap has not yet been determined. The complete solution to an elementary lubrication flow problem is typically obtained by combining (9.19), or an appropriate equivalent, with a differential or integral form of (4.10) or (7.2), and pressure boundary conditions. Such solutions are illustrated in the following examples.
Example 9.3
A sloped bearing pad of width B into the page moves horizontally at a steady speed U on a thin layer of oil with density ρ and viscosity μ. The gap between the bearing pad and a stationary hard, flat surface located at y = 0 is h(x) = ho(1 + αx/L) where α ≪ 1. If pe is the exterior pressure and p(x) is the pressure in the oil under the bearing pad, determine the load W (per unit width into the page) that the bearing can support.
Solution
The solution plan is to conserve mass exactly using (4.5), a control volume (CV) that is attached to the bearing pad, and the generic velocity profile (9.19). Then, pressure boundary conditions at the ends of the bearing pad should allow the pressure distribution under the pad to be found. Finally, W can be determined by integrating this pressure distribution.
Use the fixed-shape, but moving CV shown in Figure 9.9 that lies between x1 and x2 at the moment of interest. The mass of fluid in the CV is constant so the unsteady term in (4.5) is zero, and the control surface velocity is b = Uex. Denote the fluid velocity as u = u(x,y)ex, and recognize ndA = –exBdy on the vertical CV surface at x1 and ndA = +exBdy on the vertical CV surface at x2. Thus, (4.5) simplifies to:

Dividing this equation by ρB(x2 – x1) and taking the limit as (x2 – x1) → 0 produces:


which can substituted into the conservation of mass result and integrated to determine C1 in terms of dp/dx and h(x):

The second equation is just an algebraic rearrangement of the first, and is a simple first-order differential equation for the pressure that can be integrated using the known h(x) from the problem statement:

Using the two ends of this extended equality and the pressure conditions p(x = 0) = p(x = L) = pe produces two algebraic equations that can be solved simultaneously for the constants C1 and C2:

Thus, after some algebra the following pressure distribution is found:

However, this distribution may contain some superfluous dependence on α and x, because no approximations have been made regarding the size of α while (9.19) is only valid when α ≪ 1. Thus, keeping only the linear term in α produces:

The bearing load per unit depth into the page is:

This result shows that larger loads may be carried when the bearing slope, the fluid viscosity, the bearing size, and/or the bearing speed are larger, or the oil passage is smaller. Thus, the lubrication action of this bearing pad as described in this example is stable to load perturbations when the other parameters are held constant; an increase in load will lead to a smaller ho where the bearing’s load-carrying capacity is higher. However, the load-carrying capacity of this bearing goes to zero when α, μ, L, or U go to zero, and this bearing design fails (i.e., W becomes negative so the pad and surface are drawn into contact) when either α or U are negative. Thus, the bearing only works when it moves in the proper direction. A more detailed analysis of this bearing flow is provided in Sherman (1990).
Example 9.4: Viscous Flow Between Parallel Plates (Hele-Shaw 1898)
A viscous fluid flows with velocity u = (u, v, w) in a narrow gap between stationary parallel plates lying at z = 0 and z = h as shown in Figure 9.10. Non-zero x- and y-directed pressure gradients are maintained at the plates’ edges, and obstacles or objects of various sizes may be placed between the plates. Using the continuity equation (4.10) and the two horizontal (x,y) and one vertical (z) momentum equations (deduced in Exercise 9.23):

show that the two in-plane velocity components parallel to the plates, u and v, can be determined from the equations for two-dimensional potential flow:
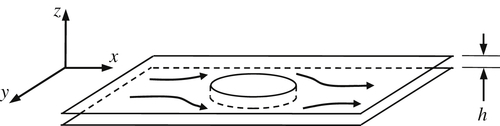
Figure 9.10 Pressure-driven viscous flow between parallel plates that trap an obstacle. The gap height h is small compared to the extent of the plates and the extent of the obstacle, shown here as a round disk.
 (7.10, 7.12)
(7.10, 7.12)
for an appropriate choice of ϕ.
Solution
The solution plan is to use the two horizontal momentum equations given above to determine the functional forms of u and v. Then ϕ can be determined via integration of (7.10). Combining these results into (4.10) should produce (7.12), the two-dimensional Laplace equation for ϕ. Integrating the two horizontal momentum equations twice in the z-direction produces:

where A, B, C, and D are constants that can be determined from the boundary conditions on z = 0, u = v = 0 which produces B = D = 0, and on z = h, u = v = 0, which produces A = –(h/2μ)(∂p/∂x) and C = –(h/2μ)(∂p/∂y). Thus, the two in-plane velocity components are:

Integrating the second equality in each case produces:

These equations are consistent when E = F = const., and this constant can be set to zero without loss of generality because it does not influence u and v, which are determined from derivatives of ϕ. Therefore, the velocity field requires a potential ϕ of the form:
To determine the equation satisfied by p or ϕ, place the results for u and v into the continuity equation (4.10) and integrate in the z-direction from z = 0 to h to find:

where the no-through-flow boundary condition ensures w = 0 on z = 0 and h. The vertical momentum equation given above requires p to be independent of z, that is, p = p(x,y,t), so p may be taken outside the z integration. The integral of z(h – z) from z = 0 to h is not zero, so it and –1/2μ can be divided out of the last equation to achieve:

This is a rather unusual and unexpected result because it requires viscous flow between closely spaced parallel plates to produce the same potential-line and streamline patterns as two-dimensional ideal flow. Interestingly, this suggestion is correct, except in thin layers having a thickness of order h near the surface of obstacles where the no-slip boundary condition on the obstacle prevents the tangential-flow slip that occurs in ideal flow. (Hele-Shaw flow near the surface of an obstacle is considered in Exercise 9.44). Thus, two-dimensional, ideal-flow streamlines past an object or obstacle may be visualized by injecting dye into pressure-driven viscous flow between closely spaced glass plates that trap a cross-sectional slice of the object or obstacle. Hele-Shaw flow has practical applications, too. Much of the manufacturing design analysis done to create molds and tooling for plastic-forming operations is based on Hele-Shaw flow.
The basic balance of pressure and viscous stresses underlying lubrication theory can be extended to gravity-driven viscous flows by appropriately revising the meaning of the pressure gradient and evaluating the constants A and B in (9.18) for different boundary conditions. Such an extension is illustrated in the next example in two dimensions for gravity-driven flow of magma, paint, or viscous oil over a horizontal surface. Gravity re-enters the formulation here because there is a large density change across the free surface of the viscous fluid (see Section 4.9 “Neglect of Gravity in Constant Density Flows”).
Example 9.5
A two-dimensional bead of a viscous fluid with density ρ and viscosity μ spreads slowly on a smooth horizontal surface under the action of gravity. Ignoring surface tension and fluid acceleration, determine a differential equation for the thickness h(x,t) of the spreading bead as a function of time.
Solution
The solution plan is to conserve mass exactly using (4.5), a stationary control volume (CV) of thickness dx, height h, and unit depth into the page (see Figure 9.11), and the generic velocity profile (9.18) when the pressure gradient is recast in terms of the thickness gradient ∂h/∂x. The constants A and B in (9.18) can be determined from the no-slip condition at y = 0, and a stress-free condition on y = h. When this refined version of (9.18) is put into the conservation of mass statement, the result is the differential equation that is sought.
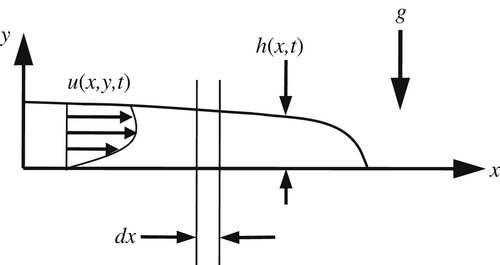
Figure 9.11 Gravity-driven spreading of a two-dimensional drop or bead on a flat, stationary surface. The fluid is not confined from above. Hydrostatic pressure forces cause the fluid to move but it is impeded by the viscous shear stress at y = 0. The flow is assumed to be symmetric about x = 0 so only half of it is shown.
By conserving mass between the two vertical lines in Figure 9.11, (4.5) becomes:

When rearranged and the limit dx → 0 is taken, this becomes:
At any location within the spreading bead, the pressure p is hydrostatic: p(x,y,t) = ρg(h(x,t) – y) when fluid acceleration is ignored. Thus, the horizontal pressure gradient in the viscous fluid is:

which is independent of y, so (9.18) becomes:

The no-slip condition at y = 0 implies that B = 0, and the no-stress condition at y = h implies:

So, the velocity profile within the bead is:
and its integral is:

When this result is combined with the integrated conservation of mass statement, the final equation is:
This is a single nonlinear partial differential equation for h(x,t) that in principle can be solved if a bead’s initial thickness, h(x,0), is known. Although this completes the effort for this example, a similarity solution to this equation does exist.