In fluid mechanics, the field quantities like fluid velocity, fluid density, pressure, etc. may vary in time, t, and across three-dimensional space, herein specified by three coordinates as a vector x = (x, y, z) or (x1, x2, x3). For multivariable functions, such as f(x1, x2, x3, t), there are important differences between partial and total derivatives, for example between ∂f/∂t and df/dt.
Partial Differentiation
(∂/∂t)f(x1, x2, x3, t) means differentiate the function f(x1, x2, x3, t) with respect to time, t, treating all other independent variables as constants. Additional information and specifications are not needed. And, multiple partial derivatives that operate on different variables can be applied in either order, that is, (∂/∂t)(∂f/∂xi) = (∂/∂xi)(∂f/∂t) and (∂/∂xi)(∂f/∂xj) = (∂/∂xj)(∂f/∂xi).
Total Differentiation
(d/dt)f(x1, x2, x3, t) means differentiate the function f(x1, x2, x3, t) with respect to time, t, including the time variation of the spatial coordinates. This total time derivative has meaning along a space-time path specified through the three-dimensional domain. Such a path specification may be given as a vector function of time, for example x = (X1(t), X2(t), X3(t)). Without such a path specification, the total time derivative of f is not fully defined; however, when the path is specified, then:
When studying fluid mechanics, the space-time path, x(t), most commonly chosen is that of a fluid particle. This path specification is commonly denoted by use of capital Ds:
Here, the evaluation of the total derivative following a fluid particle can be formally completed by using the fluid-particle velocity matching condition:
where u(x,t) is the fluid velocity at the particle location, and u1, u2, and u3 are the Cartesian components of the fluid velocity. The third equality in (B.1.2) provides three velocity-component matching conditions:
dX1/dt=u1,dX2/dt=u2,anddX3/dt=u3.
(B.1.3)
When the various parts of (B.1.3) are substituted into (B.1.1), a final form for Df/Dt emerges:
which is the same as (3.4). Here the final two equalities involve vector and index notation, respectively. These notations are described in Chapter 2. All three forms of Df/Dt are used in this text. Total and partial differentiation are the same when they operate on the same independent variable and this independent variable is the only independent variable.
Uses of Partial and Total Derivatives
There are situations in the study of fluid mechanics where a first-order partial differential equation, involving both time and space derivatives, like:
A(x,t)∂f(x,t)∂t+B(x,t)∂f(x,t)∂x=g(x,t,f)
(B.1.5)
needs to be solved to find f(x,t). To accomplish this task, assume there exists a curve C in x-t space described by equations x = X(s) and t = T(s) that allows (B.1.5) to be recast as a total derivative with respect to s. Here s is the arc length in x-t space along the curve C. The total derivative of f along s is:
Taking a ratio of the last two equations produces:
dX/dT=B(X,T)/A(X,T),
(B.1.8)
which parametrically specifies a set of curves C. Along any such curve, df/ds = g and this equation can be integrated starting from an initial condition or boundary condition to determine f.
Example B.1
Consider one-dimensional unidirectional wave propagation as specified by:
∂f(x,t)∂t+U(t)∂f(x,t)∂x=0wheref(x,0)=ϕ(x),
(B.1.9, B.1.10)
f represents a propagating disturbance of some type, and U is the propagation velocity. In this case A = 1 and B = U; thus, (B.1.8) specifies the C curves via
dXdT=U(T),orX(T)=Xo+∫0TU(τ)dτ.
(B.1.11)
With A = 1, the middle equation of (B.1.7) implies T = To + s, so (B.1.11) leads to:
x=X(s)=Xo+∫oTo+sU(τ)dτ,andt=T(s)=To+s.
(B.1.12, B.1.13)
These two equations define the set of C curves in x-t space along which the behavior of f is easily determined from the first equation of (B.1.7) with g = 0:
Here fo is the constant value of f(x,t) that is found when s varies along a particular C curve, and Xo and To are constants of integration that specify the x-t location of s = 0 on this C curve. These constants can be evaluated using the initial condition specified in (B.1.10) in terms of ϕ at T = To + s = 0, and the last form for f in (B.1.14):
fo=f(Xo,0)=ϕ(Xo)
(B.1.15)
Here it is important to note that the constant fo may be different for the various C curves that start from different x-t locations. To reach the final solution of (B.1.9), eliminate fo and Xo from (B.1.15) using (B.1.12) through (B.1.14) in favor of x, t, and f(x,t):
f(x,t)=ϕ(x−∫otU(τ)dτ).
(B.1.16)
This approach to differential equation solving where special paths are found that simplify the governing equation (or equations) can be formalized and generalized; it is called the method of characteristics. But, independent of this and perhaps more important, the two fundamental and enduring features of partial differential equation solving are displayed here.
i) Partial differential equations are solved by rearrangement and integration. Extra differentiation is typically not useful; first look for ways to integrate to find a solution.
ii) Difficulty is not entirely eliminated by changing from partial to total derivatives or vice versa. In the above example, there is initially one unknown function, f, and two independent coordinates, x and t, but this is transformed (via the method of characteristics) into a problem with two unknown functions, f and X, and one independent variable, s or t.
Integration of Partial Derivatives
There is really nothing special here except to note that constants of integration turn into functions that may depend on all the not-integrated-over independent variables. For example, consider f(x, y, z, t) that solves the partial differential equation: ∂f/∂x = Ax + By. Direct integration with y, z, and t treated as constants produces:
f=∫(Ax+By)dx=Ax2/2+Byx+C(y,z,t),
where C(y,z,t) is an unknown function that does not depend on x; it replaces the usual constant of integration in one-variable indefinite integration.
B.2. Changing Independent Variables
Two situations commonly arise in the study of fluid mechanics where changing the independent variable(s) is advantageous. The first situation is changing coordinate systems. Here the number of new and old independent variables will usually be the same. Consider the situation where a partial differential equation is known in Cartesian-time coordinates (x, y, z, t), but it will be easier to solve in another coordinate system (ξ, ψ, ζ, τ). Assume the trans-formation between the two coordinate systems is given by: ξ = X(x, y, z, t), ψ = Y(x, y, z, t), ζ = Z(x, y, z, t), and τ = T(x, y, z, t). Cartesian and temporal partial derivatives can be transformed as follows:
Consider the case where (x, y, z, t) and (ξ, ψ, ζ, τ) represent Cartesian systems with parallel axes that are moving with respect to each other at a constant velocity (U, V, W) when observed in (x, y, z, t), so that ξ = x−Ut, ψ = y−Vt, ζ = z−Wt, and τ = t. Application of the above derivative transformations (B.2.1) produces:
Perhaps unexpectedly, extra differentiations only appear in the transformed time derivative, even though the time variable transformation equation was simplest.
The second situation that requires changing independent variables occurs when a combination of independent variables (and parameters) is found that might simplify a partial differential equation. Here the usual goal is to convert a partial differential equation having multiple independent variables into a total differential equation with one independent variable. If η = H(x, y, z, t) is the combination variable, then a straightforward application of the chain rule for partial differentiation produces:
Consider a function with two independent variables, f(x,t), for which we hypothesize the existence of a special combination (or similarity) variable η = xtα, where α is a real number, that facilitates the solution of the partial differential equation for f(x,t). Mathematically, this hypothesis can be stated as: f(x,t) = f(η) = f(xtα), and partial derivatives of f can be obtained from the first and last equations of (B.2.3) with H = xtα:
Second-order derivatives are generated by appropriately differentiating these first-order results.
B.3. Basic Vector Calculus
The gradient operator, ∇, is the general-purpose directional derivative for multiple spatial coordinates. It is a vector operator, and it exists in all suitably defined coordinate systems. Its properties are a combination of those of ordinary partial derivatives and ordinary vectors. It has components and its position and operation character (multiply, dot product, cross product, etc.) matter within a set or grouping of functions or variables. For example, (u·∇)v≠v(∇·u) in general, even though these two expressions would be an equal if ∇ were replaced by an ordinary vector. Some properties of ∇ are listed here:
• In Cartesian coordinates,x=(x,y,z):∇=ex∂∂x+ey∂∂y+ez∂∂z where the es are unit vectors
• The gradient of the scalar field ρ is: ∇ρ=ex∂ρ∂x+ey∂ρ∂y+ez∂ρ∂z
• The divergence of a vector field u=(u,v,w) is: ∇·u=∂u∂x+∂v∂y+∂w∂z
• The curl of a vector field u=(u,v,w) is: ∇×u=det|exeyez∂/∂x∂/∂y∂/∂zuvw|.
Vector Identities Involving ∇
Here ρ and ϕ are scalar functions, u and F are vector functions, and x is the position vector.
• For a closed curve C that bounds surface A with n = the normal to A and t the tangent to C, Stokes' Theorem is: ∮Cu·tds=∫A(∇×u)·ndA, where s is the arc length along C.
B.4. The Dirac Delta Function
The Dirac delta function is commonly denoted δ(x), where x is a real variable. It is a unit-area impulse that exists at only one point in space; it is zero everywhere except where its argument is zero. The Dirac delta-function can be defined as a limit of a smooth function, such as:
δ(x)=limσ→0(2πσ)−1exp{−x2/2σ2}.
(B.4.1)
The value of δ(x) is infinite at x = 0 but its integral is unity. Here are a few properties of δ(x) for a, b, and xo real constants and b > a:
xδ(x−a)=aδ(x−a),
(B.4.2)
∫abδ(x−xo)dx={1fora≤xo≤b0forxo<aorb<xo},
(B.4.3)
∫−∞+∞f(x)δ(x−xo)dx=f(xo).
(B.4.4)
These properties ease the evaluation of complicated integrals when a Dirac delta function appears in the integrand. In more dimensions where x=(x,y,z), the following notation is common:
δ(x−xo)=δ(x−xo)δ(y−yo)δ(z−zo).
In the study of fluid mechanics, the usual notation for the Dirac delta-function is potentially confusing because δ is also commonly used to denote a length scale of interest in the flow field, such as a boundary-layer thickness or the length scale of a similarity variable. Thus, specific mention of the Dirac delta function is made where it is used in the text.
Example B.4
Evaluate the integral: I=∫−∞+∞F(x)[(xo−x)2+ro2]−1/2eikxδ(x−ct)dx. Here the limits of integration ensure that x will equal ct somewhere in the integration. Equation (B.4.4) implies that the value of this integral is determined by replacing x with ct in the integrand; therefore: I=F(ct)[(xo−ct)2+ro2]−1/2eikct.
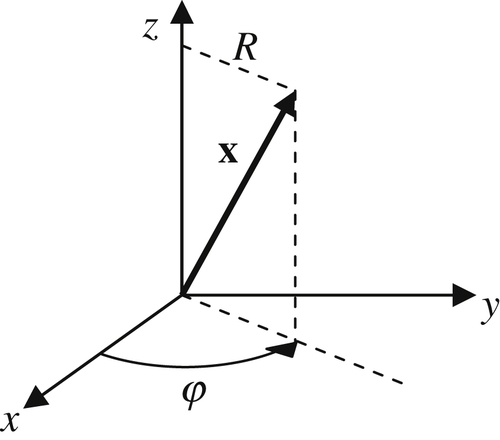
B.5. Common Three-Dimensional Coordinate Systems
In all cases that follow, ξ, ψ, and ζ are constants.

 (B.1.1)
(B.1.1) (B.1.2)
(B.1.2) (B.1.3)
(B.1.3) (B.1.4)
(B.1.4) (B.1.5)
(B.1.5) (B.1.6)
(B.1.6) (B.1.7)
(B.1.7) (B.1.8)
(B.1.8) (B.1.9, B.1.10)
(B.1.9, B.1.10) (B.1.11)
(B.1.11) (B.1.12, B.1.13)
(B.1.12, B.1.13) (B.1.14)
(B.1.14) (B.1.15)
(B.1.15) (B.1.16)
(B.1.16)
 (B.2.1)
(B.2.1) (B.2.2)
(B.2.2) (B.2.3)
(B.2.3)
 , is the general-purpose directional derivative for multiple spatial coordinates. It is a vector operator, and it exists in all suitably defined coordinate systems. Its properties are a combination of those of ordinary partial derivatives and ordinary vectors. It has components and its position and operation character (multiply, dot product, cross product, etc.) matter within a set or grouping of functions or variables. For example,
, is the general-purpose directional derivative for multiple spatial coordinates. It is a vector operator, and it exists in all suitably defined coordinate systems. Its properties are a combination of those of ordinary partial derivatives and ordinary vectors. It has components and its position and operation character (multiply, dot product, cross product, etc.) matter within a set or grouping of functions or variables. For example,  in general, even though these two expressions would be an equal if
in general, even though these two expressions would be an equal if  where the es are unit vectors
where the es are unit vectors
 is:
is: 
 is:
is:  .
. (B.3.1)
(B.3.1) (B.3.2)
(B.3.2) (B.3.3)
(B.3.3) (B.3.4)
(B.3.4) (B.3.5)
(B.3.5) (B.3.6)
(B.3.6) (B.3.7)
(B.3.7) (B.3.8)
(B.3.8) (B.3.9)
(B.3.9) (B.3.10)
(B.3.10) (B.3.11)
(B.3.11) (B.3.12)
(B.3.12) (B.3.13)
(B.3.13)
 , where s is the arc length along C.
, where s is the arc length along C. (B.4.1)
(B.4.1) (B.4.2)
(B.4.2) (B.4.3)
(B.4.3) (B.4.4)
(B.4.4) , the following notation is common:
, the following notation is common:
 . Here the limits of integration ensure that x will equal ct somewhere in the integration. Equation (B.4.4) implies that the value of this integral is determined by replacing x with ct in the integrand; therefore:
. Here the limits of integration ensure that x will equal ct somewhere in the integration. Equation (B.4.4) implies that the value of this integral is determined by replacing x with ct in the integrand; therefore:  .
.

 for i and j = 1, 2, or 3; that is, Cartesian unit vectors are independent of the coordinate values
for i and j = 1, 2, or 3; that is, Cartesian unit vectors are independent of the coordinate values
 or
or  ,
, 
 ,
,  , ez = same as Cartesian
, ez = same as Cartesian


 ,
,  ,
,  ; or
; or  ,
,  , and
, and 
 ,
,  ,
,