Chapter 3
Kinematics
Abstract
Kinematics is the study of motion without reference to the forces or stresses that produce the motion. In fluid mechanics, the Eulerian description of fluid motion is most common. Here, the fluid velocity field is considered in a fixed region of space through which the fluid moves so there are as many as four independent variables – three spatial coordinates and time. In the Eulerian formulation, fluid acceleration is not determined for individual fluid particles. Instead it is determined as a function of all four independent variables and therefore involves both temporal and spatial differentiations of the fluid velocity field. Streamlines, path lines, and streak lines may be used to describe flow field kinematics within the region of interest. Strain-rate and rotation tensors describe the deformation and rotation of infinitesimal fluid particles. For arbitrary but finite regions of space, commonly called control volumes, time derivatives of volume integrals must include the possibility of fluid and/or volume motion through use of the Reynolds Transport Theorem.
Keywords
Kinematics; Coordinate systems; Streamlines; Flow lines; Fluid acceleration; Strain rate; Rotation rate; Reynolds Transport Theorem• To review the basic Cartesian and curvilinear coordinates systems
• To link fluid flow kinematics with the particle kinematics
• To define the various flow lines in unsteady fluid velocity fields
• To present fluid particle acceleration in the Eulerian flow-field formulation
• To establish the fundamental meaning of the strain rate and rotation tensors
• To present the means for time differentiating general three-dimensional volume integrations
3.1. Introduction and Coordinate Systems
Kinematics is the study of motion without reference to the forces or stresses that produce the motion. In this chapter, fluid kinematics is presented in two and three dimensions starting with simple fluid-particle-path concepts and then proceeding to topics of greater complexity. These include: particle- and field-based descriptions for the time-dependent position, velocity, and acceleration of fluid particles; the relationship between the fluid velocity gradient tensor and the deformation and rotation of fluid elements; and the general mathematical relationships that govern arbitrary volumes that move and deform within flow fields. The forces and stresses that cause fluid motion are considered in subsequent chapters covering the dynamics or kinetics of fluid motion.
In general, three independent spatial dimensions and time are needed to fully describe fluid motion. When a flow does not depend on time, it is called steady; when it does depend on time it is called unsteady. In addition, fluid motion is studied in fewer than three dimensions whenever possible because the necessary analysis is usually simpler and relevant phenomena are more easily understood and visualized.
A truly one-dimensional flow is one in which the flow’s characteristics can be entirely described with one independent spatial variable. Few real flows are strictly one dimensional, although flows in long, straight constant-cross-section conduits come close. Here, the independent coordinate may be aligned with the flow direction, as in the case of low-frequency pulsations in a pipe as shown in Figure 3.1a, where z is the independent coordinate and darker gray indicates higher gas density. Alternatively, the independent coordinate may be aligned in the cross-stream direction, as in the case of viscous flow in a round tube where the radial distance, R, from the tube’s centerline is the independent coordinate (Figure 3.1b). In addition, higher dimensional flows are sometimes analyzed in one dimension by averaging the properties of the higher dimensional flow over an appropriate distance or area (Figure 3.1c and d).
A two-dimensional, or plane, flow is one in which the variation of flow characteristics can be described by two spatial coordinates. The flow of an ideal fluid past a circular cylinder of infinite length having its axis perpendicular to the primary flow direction is an example of a plane flow (see Figure 3.2a). (Here we should note that the word “cylinder” may also be used in this context for any body having a cross-sectional shape that is invariant along its length even if this shape is not circular.) This definition of two-dimensional flow officially includes the flow around bodies of revolution where flow characteristics are identical in any plane that contains the body’s axis (see Figure 7.24). However, such flows are customarily called three-dimensional axisymmetric flows.
A three-dimensional flow is one that can only be properly described with three independent spatial coordinates and is the most general case considered in this text. Sometimes curvilinear coordinates that match flow-field boundaries or symmetries greatly simplify the analysis and description of flow fields. Thus, several different coordinate systems are used in this text (see Figure 3.3). Two-dimensional (plane) Cartesian and polar coordinates for an arbitrary point P (Figure 3.3a) may be denoted by the coordinate pairs (x, y), (x1, x2), or (r, θ) with the corresponding velocity components (u, v), (u1, u2), or ( u r , u θ )  . Here the axis perpendicular to the plane of interest will be the z-axis or x3-axis. In three dimensions, Cartesian coordinates (Figures 2.1 and 3.3b) may be used to locate a point P via the coordinate triplets (x, y, z) or (x1, x2, x3) with corresponding velocity components (u, v, w) or (u1, u2, u3). Cylindrical polar coordinates for P (Figure 3.3c) are denoted by (R, φ, z) with corresponding velocity components
. Here the axis perpendicular to the plane of interest will be the z-axis or x3-axis. In three dimensions, Cartesian coordinates (Figures 2.1 and 3.3b) may be used to locate a point P via the coordinate triplets (x, y, z) or (x1, x2, x3) with corresponding velocity components (u, v, w) or (u1, u2, u3). Cylindrical polar coordinates for P (Figure 3.3c) are denoted by (R, φ, z) with corresponding velocity components ( u R , u φ , u z )  . Spherical polar coordinates for P (Figure 3.3d) are denoted by (r, θ, φ) with the corresponding velocity components
. Spherical polar coordinates for P (Figure 3.3d) are denoted by (r, θ, φ) with the corresponding velocity components ( u r , u θ , u φ )  . In all cases, unit vectors are denoted by e with an appropriate subscript as in (2.1) and Figure 2.1. More information about these coordinate systems is provided in Appendix B.
. In all cases, unit vectors are denoted by e with an appropriate subscript as in (2.1) and Figure 2.1. More information about these coordinate systems is provided in Appendix B.
. Here the axis perpendicular to the plane of interest will be the z-axis or x3-axis. In three dimensions, Cartesian coordinates (Figures 2.1 and 3.3b) may be used to locate a point P via the coordinate triplets (x, y, z) or (x1, x2, x3) with corresponding velocity components (u, v, w) or (u1, u2, u3). Cylindrical polar coordinates for P (Figure 3.3c) are denoted by (R, φ, z) with corresponding velocity components . Spherical polar coordinates for P (Figure 3.3d) are denoted by (r, θ, φ) with the corresponding velocity components . In all cases, unit vectors are denoted by e with an appropriate subscript as in (2.1) and Figure 2.1. More information about these coordinate systems is provided in Appendix B.
Figure 3.1 (a) Example of a one-dimensional fluid flow in which the gas density, shown by the grayscale, varies in the stream-wise z direction but not in the cross-stream direction. (b) Example of a one-dimensional fluid flow in which the fluid velocity varies in the cross-stream R direction but not in the stream-wise direction. (c) Example of a two-dimensional fluid flow where the fluid velocity varies in the cross-stream and stream-wise directions. (d) The one-dimensional approximation to the flow shown in part (c). Here the approximate flow field varies only in the stream-wise z direction. In (c) and (d), these arguments are for the primary velocity component in the z-direction; in such a tapered duct there must be a vertical velocity component that varies in the vertical direction, too.
Example 3.1
Write the unidirectional velocity field u = Vey in spherical coordinates, and the uniform outflow velocity field u = Uer in Cartesian coordinates.
Solution
The coordinate system descriptions in Figure 3.3 and the information in Appendix B.5 are needed here. The first flow field, u = Vey, represents a uniform velocity in the y-direction, and it is specified with a Cartesian coordinate unit vector. To find its components ( u r , u θ , u φ )  in spherical coordinates, compute the appropriate dot products:
in spherical coordinates, compute the appropriate dot products: u r = u · e r = V e y · e r = V sin θ sin φ  ,
, u θ = u · e θ = V e y · e θ = V cos θ sin φ  , and
, and u φ = u · e φ = V e y · e φ = V cos φ  , so:
, so:
in spherical coordinates, compute the appropriate dot products: , , and , so:
The second flow field u = Uer, represents constant radial flow away from the origin of coordinates, and it is specified with a spherical coordinate unit vector. To find its components ( u , v , w )  in Cartesian coordinates, compute the appropriate dot products:
in Cartesian coordinates, compute the appropriate dot products: u = u · e x = U e r · e x = U sin θ cos φ  ,
, v = u · e y = U e r · e y = U sin θ sin φ  , and
, and w = u · e z = U e r · e z = U cos θ  , so:
, so:
in Cartesian coordinates, compute the appropriate dot products: , , and , so:
The flow-field specifications in the problem statement are much simpler than either answer. This fact motivates selection of a coordinate system that matches the flow geometry. Mathematical expressions for velocity fields, boundary conditions, and other aspects of fluid flows are much simpler when stated using an appropriate coordinate system.
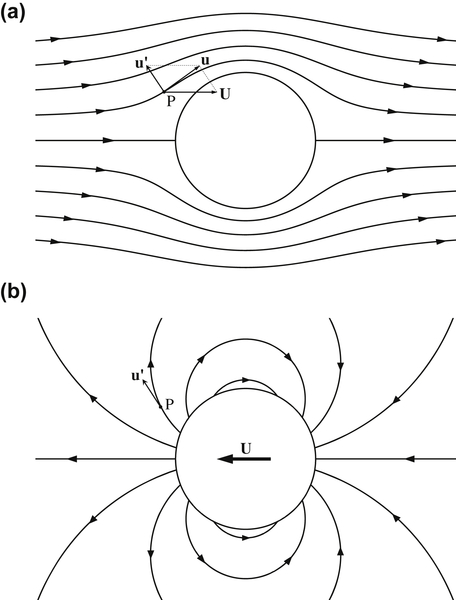
Figure 3.2 Sample flow fields where two spatial coordinates are needed. (a) Steady flow of an ideal incompressible fluid past a long stationary circular cylinder with its axis perpendicular to the flow. Here the total fluid velocity u at point P can be considered a sum of the flow velocity far from the cylinder U, and a velocity component u′ caused by the presence of the cylinder. (b) Unsteady flow of a nominally quiescent ideal incompressible fluid around a moving long circular cylinder with its axis perpendicular to the page. Here the cylinder velocity U is shown inside the cylinder, and the fluid velocity u′ at point P is caused by the presence of the moving cylinder alone. Although the two fields look very different, they only differ by a Galilean transformation. The streamlines in (a) can be changed to those in (b) by switching to a frame of reference where the fluid far from the cylinder is motionless.

Figure 3.3 Coordinate systems commonly used in this text. In each case P is an arbitrary point away from the origin. (a) Plane Cartesian or polar coordinates where P is located by the coordinate pairs (x, y), (x1, x2), or (r, θ). (b) Three-dimensional Cartesian coordinates where P is located by the coordinate triplets (x, y, z) or (x1, x2, x3). (c) Cylindrical polar coordinates where P is located by the coordinate triplet (R, φ, z). (d) Spherical polar coordinates where P is located by the coordinate triplet (r, θ, φ).
3.2. Particle and Field Descriptions of Fluid Motion
There are two ways to describe fluid motion. In the Lagrangian description, fluid particles are followed as they move through a flow field. In the Eulerian description, a flow field’s characteristics are monitored at fixed locations or in stationary regions of space. In fluid mechanics, an understanding of both descriptions is necessary because the acceleration following a fluid particle is needed for application of Newton’s second law to fluid motion while observations, measurements, and simulations of fluid flows are commonly made at fixed locations or in stationary spatial regions with the fluid moving past these locations or through the regions of interest.
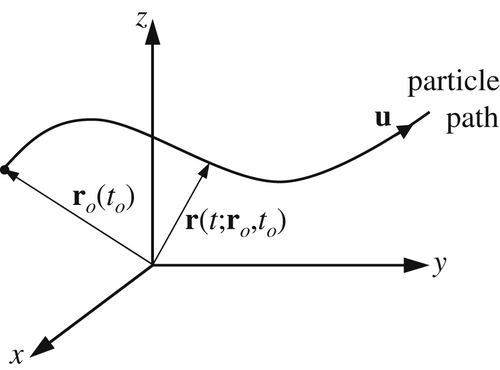
The Lagrangian description is based on the motion of fluid particles. It is the direct extension of single particle kinematics (e.g., see Meriam & Kraige, 2007) to a whole field of fluid particles that are labeled by their location, ro, at a reference time, t = to. The subsequent position r of each fluid particle as a function of time, r(t;ro,to), specifies the flow field. Here, ro and to are boundary or initial condition parameters that label fluid particles, and are not independent variables. Thus, the current velocity u and acceleration a of the fluid particle that was located at ro at time to are obtained from the first and second temporal derivatives of particle position r(t;ro,to):
 (3.1)
(3.1)
These are Lagrangian definitions for u and a, and are valid for any fluid particle as it moves along its trajectory through the flow field (Figure 3.4). In this particle-based description of fluid motion, fluid particle kinematics are identical to that in ordinary particle mechanics, and any scalar, vector, or tensor flow-field property F may depend on the path(s) followed of the relevant fluid particle(s) and time: F = F[r(t;ro,to), t]. The Lagrangian description of fluid motion is used in some simulations of combustion and multiphase flows, and in cinema-graphic animations.
The Eulerian description of fluid kinematics focuses on flow field properties at locations or in regions of interest, and involves four independent variables: the three spatial coordinates represented by the position vector x, and time t. Thus, in this field-based Eulerian description of fluid motion, a flow-field property F depends directly on x and t: F = F(x,t). Even though this description complicates the calculation of a, because individual fluid particles are not followed, it is the favored description of fluid motion.
Kinematic relationships between the two descriptions can be determined by requiring equality of flow-field properties when r and x define the same point in space, both are resolved in the same coordinate system, and a common clock is used to determine the time t:
 (3.2)
(3.2)
Here the second equation specifies the trajectory followed by a fluid particle. This compatibility requirement forms the basis for determining and interpreting time derivatives in the Eulerian description of fluid motion. Applying a total time derivative to the first equation in (3.2) produces:
 (3.3)
(3.3)
where the components of r are ri. In (3.3), the time derivatives of ri are the components ui of the fluid particle’s velocity u from (3.1). In addition, ∂F/∂ri = ∂F/∂xi when x = r, so the right side of (3.3) can be rewritten entirely in the Eulerian description:
 (3.4)
(3.4)
where the final equality defines D/Dt as the total time derivative in the Eulerian description of fluid motion. It is the equivalent of the total time derivative d/dt in the Lagrangian description and is known as the material derivative, substantial derivative, or particle derivative, where the final attribution emphasizes the fact that it provides time derivative information following a fluid particle.
The material derivative D/Dt defined in (3.4) is composed of unsteady and advective parts. (1) The unsteady part of DF/Dt is ∂F/∂t and it is the local temporal rate of change of F at the location x. It is zero when F is independent of time. (2) The advective (or convective) part of DF/Dt is u·∇F and it is the rate of change of F that occurs as fluid particles move from one location to another. It is zero where F is spatially uniform, the fluid is not moving, or u and ∇F are perpendicular. For clarity and consistency in this book, the movement of fluid particles from place to place is referred to as advection with the term convection being reserved for the special circumstance of heat transport by fluid movement. In vector and index notations, (3.4) is commonly rearranged slightly and written as:
 (3.5)
(3.5)
The scalar product u·∇F is the magnitude of u times the component of ∇F in the direction of u so (3.5) can then be written in scalar notation as:
 (3.6)
(3.6)
where s is a path-length coordinate along the fluid particle trajectory x = r(t;ro,to), that is, d r = e u d s  with
with e u = u / | u |  .
.
with .Example 3.2
A fluid particle in a steady flow moves along the x-axis. Its distance from the origin is ro at time to and it's trajectory is r ( t ) = [ K ( t − t o ) + r o 3 ] 1 / 3  , where K is a positive constant with units of volume/time. Determine this flow's Eulerian velocity and acceleration, u(x) and a(x), and show that a(x) may also be obtained from Du(x)/Dt.
, where K is a positive constant with units of volume/time. Determine this flow's Eulerian velocity and acceleration, u(x) and a(x), and show that a(x) may also be obtained from Du(x)/Dt.
, where K is a positive constant with units of volume/time. Determine this flow's Eulerian velocity and acceleration, u(x) and a(x), and show that a(x) may also be obtained from Du(x)/Dt.Solution
First, perform the differentiations indicated in (3.1) to determine the particle's Lagrangian velocity and acceleration:

To find the Eulerian fluid velocity and acceleration (functions of position), require u(x) and a(x) to be equal to u(t) and a(t) when x = r(t). This step can be completed by substituting the given form of r(t) into the equations for u(t) and a(t) to eliminate the particle-specification information (ro and to) as follows:

To show that this a(x) may also be obtained from Du(x)/Dt, use (3.5) with F = u(x). Here, the Eulerian velocity does not depend on time and it is unidirectional, so the partial time derivative in Du(x)/Dt drops out, and the dot product in Du(x)/Dt simplifies to a single term. This lone dot-product term yields the desired result.

3.3. Flow Lines, Fluid Acceleration, and Galilean Transformation
In the Eulerian description, three types of curves are commonly used to describe fluid motion – streamlines, path lines, and streak lines. These are defined and described here assuming that the fluid velocity vector, u, is known at every point of space and instant of time throughout the region of interest. Streamlines, path lines, and streak lines all coincide when the flow is steady. These curves are often valuable for understanding fluid motion and form the basis for experimental techniques that track seed particles or dye filaments. Pictorial and photographic examples of flow lines can be found in specialty volumes devoted to flow visualization (Van Dyke, 1982; Samimy et al., 2003).
A streamline is a curve that is instantaneously tangent to the fluid velocity throughout the flow field. In unsteady flows the streamline pattern changes with time. In Cartesian coordinates, if ds = (dx, dy, dz) is an element of arc length along a streamline (Figure 3.5) and u = (u, v, w) is the local fluid velocity vector, then the tangency requirement on ds and u leads to:
 (3.7)
(3.7)
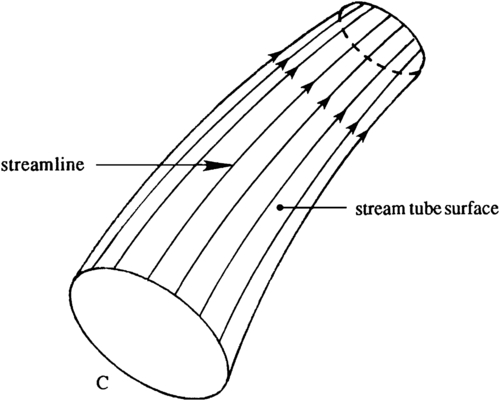
(see Exercise 3.5), and u × ds = 0 because ds and u are locally parallel. Integrating (3.7) in both the upstream and downstream directions from a variety of reference locations allows streamlines to be determined throughout the flow field. If these reference locations lie on a closed curve C, the resulting stream surface is called a stream tube (Figure 3.6). No fluid crosses a stream tube’s surface because the fluid velocity vector is everywhere tangent to it. Streamlines are useful in the depiction of flow fields and important for calculations involving simplifications (Bernoulli equations) of the full equations of fluid motion. In experiments, streamlines may be visualized by particle streak photography or by integrating (3.7) using measured velocity fields.
A path line is the trajectory of a fluid particle of fixed identity. It is defined in (3.2) and (3.3) as x = r(t;ro,to). The equation of the path line for the fluid particle launched from ro at to is obtained from the fluid velocity u by integrating:
 (3.8)
(3.8)
subject to the requirement r(to) = ro. Other path lines are obtained by integrating (3.8) from different values of ro or to. A discretized version of (3.8) is the basis for particle image velocimetry (PIV), a popular and powerful flow field measurement technique (Raffel et al., 1998).
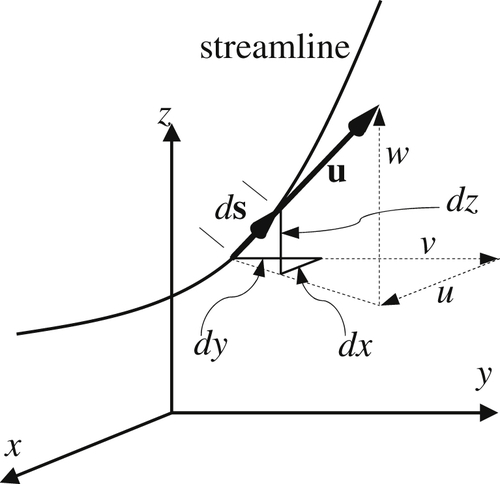
Figure 3.5 Streamline geometry. The arc-length element of a streamline, ds, is locally tangent to the fluid velocity u so its components and the components of the velocity must follow (3.7).
A streak line is the curve obtained by connecting all the fluid particles that will pass or have passed through a fixed point in space. The streak line through the point xo at time t is found by integrating (3.8) for all relevant reference times, to, subject to the requirement r(to) = xo. When completed, this integration provides a path line, x = r(t;xo,to), for each value of to. At a fixed time t, the components of these path-line equations, xi = ri(t;xo,to), provide a parametric specification of the streak line with to as the parameter. Alternatively, these path-line component equations can sometimes be combined to eliminate to and thereby produce an equation that directly specifies the streak line through the point xo at time t. Streak lines may be visualized in experiments by injecting a passive marker, like dye or smoke, from a small port and observing were it goes as it is carried through the flow field.
Example 3.3
In two-dimensional (x,y)-Cartesian coordinates, determine the streamline, path line, and streak line that pass through the origin of coordinates at t = t′ in the unsteady two-dimensional near-surface flow field typical of long-wavelength water waves with amplitude ξo: u = ωξocos(ωt) and v = ωξosin(ωt).
Streamline Solution
Utilize the first equality in (3.7) to find:

Integrating once produces: y = xtan(ωt′) + const. For the streamline to pass through the origin (x = y = 0), the constant must equal zero, so the streamline equation is: y = xtan(ωt′).

Path-line Solution

Integrate each of these equations once to find: x = ξosin(ωt) + xo, and y = –ξocos(ωt) + yo, where xo and yo are integration constants. The path-line requirement at x = y = 0 and t = t′ implies xo = −ξosin(ωt′), and yo = ξocos(ωt′), so the path-line component equations are:

Here, the time variable t can be eliminated via a little algebra to find:

which is the equation of a circle of radius ξo centered on the location [–ξosin(ωt′), ξocos(ωt′)].
Streak-line Solution
To determine the streak line that passes through the origin of coordinates at t = t′, the location of the fluid particle that passed through x = y = 0 at t = to must be found. Use the path-line results above but evaluate at to instead of t′ to find different constants. Thus the parametric streak-line component equations are:

Combine these equations to eliminate to and evaluate the result at t = t′ to find the required streak line:

This is the equation of a circle of radius ξo centered on the location [ξosin(ωt′), –ξocos(ωt′)]. The three flow lines in this example are shown in Figure 3.7. In this case, the streamline, path line, and streak line are all tangent to each other at the origin of coordinates.
From this example it should be clear that streamlines, path lines, and streak lines differ in an unsteady flow field. This situation is also illustrated in Figure 3.2, which shows streamlines when there is relative motion of a circular cylinder and an ideal fluid. Figure 3.2a shows streamlines for a stationary cylinder with the fluid moving past it, a steady flow. Here, fluid particles that approach the cylinder are forced to move up or down to go around it. Figure 3.2b shows streamlines for a moving cylinder in a nominally quiescent fluid, an unsteady flow. Here, streamlines originate on the left side of the advancing cylinder where fluid particles are pushed to the left to make room for the cylinder. These streamlines curve backward and fluid particles move rightward at the cylinder’s widest point. These streamlines terminate on the right side of the cylinder where fluid particles again move to the left to fill in the region behind the moving cylinder. Although their streamline patterns appear dissimilar, these flow fields only differ by a Galilean transformation. Consider the fluid velocity at a point P that lies at the same location relative to the cylinder in both fields. If u′ is the fluid velocity at P in Figure 3.2b where the cylinder is moving at speed U, then the fluid velocity u at P in Figure 3.2a is u = U + u′. If U is constant, the fluid acceleration in both fields must be the same at the same location relative to the cylinder.
This expectation can be verified in general using (3.5) with F replaced by the fluid velocity observed in different coordinate frames. Consider a Cartesian coordinate system O ′ x ′ y ′ z ′  that moves at a constant velocity U with respect to a stationary system
that moves at a constant velocity U with respect to a stationary system O x y z  having parallel axes (Figure 3.8). The fluid velocity
having parallel axes (Figure 3.8). The fluid velocity u ′ ( x ′ , t ′ )  observed in
observed in O ′ x ′ y ′ z ′ O x y z u ′ ( x ′ , t ′ ) x = x ′ + U t + x ′ o  , where
, where x ′ o  is the vector distance from
is the vector distance from O  to
to O ′  at t = 0. Under these conditions it can be shown that:
at t = 0. Under these conditions it can be shown that:
that moves at a constant velocity U with respect to a stationary system having parallel axes (Figure 3.8). The fluid velocity observed in will be related to the fluid velocity u(x,t) observed in by u(x,t) = U + when t = t′ and , where is the vector distance from to at t = 0. Under these conditions it can be shown that: (3.9)
(3.9)
(Exercise 3.13) where ∇ ′  operates on the primed coordinates. The first and second terms of the left most part of (3.9) are the unsteady and advective acceleration terms in
operates on the primed coordinates. The first and second terms of the left most part of (3.9) are the unsteady and advective acceleration terms in O x y z
operates on the primed coordinates. The first and second terms of the left most part of (3.9) are the unsteady and advective acceleration terms in . The unsteady acceleration term, ∂u/∂t, is nonzero at x when u varies with time at x. It is zero everywhere when the flow is steady. The advective acceleration term, (u·∇)u, is nonzero when fluid particles move between locations where the fluid velocity is different. It is zero when the fluid velocity is zero, the fluid velocity is uniform in space, or when the fluid velocity only varies in the cross-stream direction. In addition, the unsteady term is linear in u while the advective term is nonlinear (quadratic) in u. This nonlinearity is a primary feature of fluid mechanics. When u is small enough for this nonlinearity to be ignored, fluid mechanics reduces to acoustics or, when u = 0, to fluid statics.When examined together, the sample flow fields in Figure 3.2 and the Galilean invariance of the Eulerian fluid acceleration, (3.9), show that the relative importance of the steady and advective fluid-acceleration terms depends on the frame of reference of the observer. Figure 3.2a depicts a steady flow where the streamlines do not depend on time. Thus, the unsteady acceleration term, ∂u/∂t, is zero. However, the streamlines do bend in the vicinity of the cylinder so fluid particles must feel some acceleration because the absence of fluid-particle acceleration in a flow field corresponds to constant fluid-particle velocity and straight streamlines. Therefore, the advective acceleration term, (u·∇)u, is nonzero for the flow in Figure 3.2a. In Figure 3.2b, the flow is unsteady and the streamlines are curved, so both acceleration terms in the right-most part of (3.9) are nonzero. These observations imply that a Galilean transformation can alter the relative importance of the unsteady and advective fluid acceleration terms without changing the overall fluid-particle acceleration. Thus, an astutely-chosen steadily-moving coordinate system can be used to enhance (or reduce) the relative importance of either the unsteady or advective fluid-acceleration term.
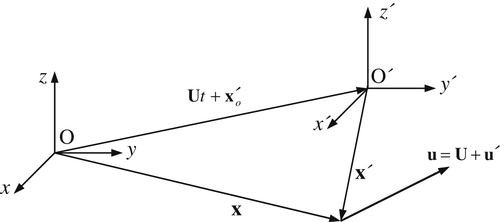
Figure 3.8 Geometry for showing that the fluid particle acceleration as determined by (3.9) is independent of the frame of reference when the frames differ by a Galilean transformation. Here O x y z O ′ x ′ y ′ z ′ O x y z O ′ x ′ y ′ z ′
is stationary and moves with respect to it at a constant speed U, the axes of the two frames are parallel, and x and x′ represent the same location. The fluid velocity observed at x in frame is u. The fluid velocity observed at x′ in frame is u′.Additional insights into the character of the unsteady and advective acceleration terms might also be obtained from the reader’s observations and experiences. For example, a nonzero unsteady acceleration is readily observed at any street intersection regulated by a traffic light with the moving or stationary vehicles taking the place of fluid particles. Here, a change in the traffic light may halt east-west vehicle flow and allow north-south vehicle flow to begin, thereby producing a time-dependent 90° rotation of the traffic-flow streamlines at the intersection location. Similarly, a nonzero advective acceleration is readily observed or experienced by rollercoaster riders when an analogy is made between the rollercoaster track and a streamline. While stationary and waiting in line, soon-to-be rollercoaster riders can observe that the track’s shape involves hills, curves, and bends, and that this shape does not depend on time. This situation is analogous to the stationary observer of a nontrivial steady fluid flow – like that depicted in Figure 3.2a – who readily notes that streamlines curve and bend but do not depend on time. Thus, the unsteady acceleration term is zero for both the rollercoaster and a steady flow because both the rollercoaster cars and fluid particles travel through space on fixed-shape trajectories and achieve consistent (time-independent) velocities at any point along the track or streamline. However, anyone who has ever ridden a rollercoaster will know that significant acceleration is possible while following a rollercoaster’s fixed-shape track because a rollercoaster car’s velocity varies in magnitude and direction as it traverses the track. These velocity variations result from the advective acceleration, and fluid particles that follow curved fixed-shape streamlines experience it as well. Within this rollercoaster-streamline analogy a nonzero unsteady acceleration would correspond to rollercoaster cars and fluid particles following time-dependent paths. Such a possibility is certainly unusual for rollercoaster riders; rollercoaster tracks are nearly rigid, seldom fall down (thankfully), and are typically designed to produce consistent car velocities at each point along the track.
3.4. Strain and Rotation Rates
Given the definition of a fluid as a material that deforms continuously under the action of a shear stress, the basic constitutive law for fluids relates fluid element deformation rates to the stresses (surface forces per unit area) applied to a fluid element. This section describes fluid-element deformation and rotation rates in terms of the fluid velocity gradient tensor, ∂ui/∂xj. The constitutive law for Newtonian fluids is covered in the next chapter. The various illustrations and interpretations provided here are analogous to their counterparts in solid mechanics when the fluid-appropriate strain rate (based on velocity u) is replaced by the solid-appropriate strain (based on displacement).
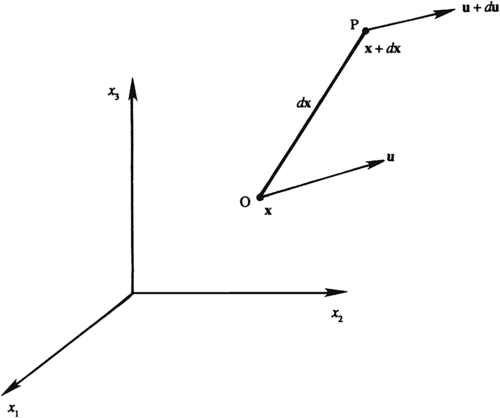
The relative motion between two neighboring points can be written as the sum of the motion due to local rotation and deformation. Consider the situation depicted in Figure 3.9, and let u(x,t) be the velocity at point O (position vector x), and let u + du be the velocity at the same time at a nearby neighboring point P (position vector x + dx). A three-dimensional first-order Taylor expansion of u about x leads to the following relationship between the components of du and dx:
 (3.10)
(3.10)
The term in parentheses in (3.10), ∂ui/∂xj, is the velocity gradient tensor, and it can be decomposed into symmetric, Sij, and antisymmetric, Rij, tensors:
 (3.11, 3.12, 3.13)
(3.11, 3.12, 3.13)
Here, Sij is the strain rate tensor, and Rij is the rotation tensor. The decomposition of ∂ui/∂xj provided by (3.11) is important when formulating the conservation equations for fluid motion because Sij, which embodies fluid element deformation, is related to the stress field in a moving fluid while Rij, which embodies fluid element rotation, is not.
The strain rate tensor has on- and off-diagonal terms. The diagonal terms of Sij represent elongation and contraction per unit length in the various coordinate directions, and are sometimes called linear strain rates. A geometrical interpretation of Sij’s first component, S11, is provided in Figure 3.10. The rate of change of fluid element length in the x1-direction per unit length in this direction is:

where D/Dt indicates that the fluid element is followed as extension takes place. This simple construction is readily extended to the other two Cartesian directions, and in general the linear strain rate in the η direction is ∂ u η / ∂ x η  where no summation over the repeated η-index is implied. (Greek subscripts are commonly used when the summation convention is not followed.)
where no summation over the repeated η-index is implied. (Greek subscripts are commonly used when the summation convention is not followed.)
where no summation over the repeated η-index is implied. (Greek subscripts are commonly used when the summation convention is not followed.)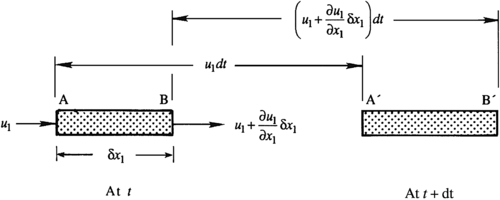
Figure 3.10 Illustration of positive linear strain rate in the first coordinate direction. Here, A′B′ = AB + BB′ − AA′, and a positive S11 = ∂u1/∂x1 corresponds to a lengthening of the fluid element.
The off-diagonal terms of Sij represent shear deformations that change the relative orientations of material line segments initially parallel to the i- and j-directions in the flow. A geometrical interpretation of Sij’s first off-diagonal component, S12 = S21, is provided in Figure 3.11. The average rate at which the initially perpendicular segments δx1 and δx2 rotate toward each other is:

where again D/Dt indicates that the fluid element is followed as shear deformation takes place, and again this simple construction is readily extended to the other two Cartesian direction pairs. Thus, the off-diagonal terms of Sij represent the average rate at which material line segments initially parallel to the i- and j-directions rotate toward each other.

Figure 3.11 Illustration of positive deformation of a fluid element in the plane defined by the first and second coordinate directions. Here, both ∂u1/∂x2 and ∂u2/∂x1 are shown as positive, so S12 = S21 from (3.12) is also positive. The deformation angle dα = ∠ C B A  is proportional to ∂u1/∂x2 while dβ is proportional to ∂u2/∂x1.
is proportional to ∂u1/∂x2 while dβ is proportional to ∂u2/∂x1.
is proportional to ∂u1/∂x2 while dβ is proportional to ∂u2/∂x1.Here we also note that Sij is zero for any rigid body motion composed of translation at a spatially uniform velocity U and rotation at a constant rate Ω (see Exercise 3.19). Thus, Sij is independent of the frame of reference in which it is observed, even if U depends on time and the frame of reference is rotating.
The first invariant of Sij (the sum of its diagonal terms) is the volumetric strain rate or bulk strain rate. For a small volume δV = δx1δx2δx3, it can be shown (Exercise 3.20) that:
 (3.14)
(3.14)
Thus, Sii specifies the rate of volume change per unit volume and it does not depend on the orientation of the coordinate system.
The second member of the strain-rate decomposition (3.11) is the rotation tensor, Rij. It is antisymmetric so its diagonal elements are zero and its off-diagonal elements are equal and opposite. Furthermore, its three independent elements can be put in correspondence with a vector. From (2.26), (2.27), or (3.13), this vector is the vorticity, ω =∇× u  , and the correspondence is:
, and the correspondence is:
, and the correspondence is: (2.26, 2.27, 3.15)
(2.26, 2.27, 3.15)
where
 (2.25, 3.16)
(2.25, 3.16)
Figure 3.11 illustrates the motion of an initially square fluid element in the (x1,x2)-plane when ∂u1/∂x2 and ∂u2/∂x1 are nonzero and unequal so that –ω3 = R12 = –R21 ≠ 0. In this situation, the fluid element translates and deforms in the (x1,x2)-plane, and rotates about the third coordinate axis. The average rotation rate is:

where again D/Dt indicates that the fluid element is followed as rotation takes place, and again this simple construction is readily extended to the other two Cartesian direction pairs. Thus, ω and Rij represent twice the fluid element rotation rate (see also Exercise 2.1). This means that ω and Rij depend on the frame of reference in which they are determined since it is possible to choose a frame of reference that rotates with the fluid particle of interest at the time of interest. In such a co-rotating frame, ω and Rij will be zero but they will be nonzero if they are determined in a frame of reference that rotates at a different rate (see Exercise 3.21).
Interestingly, the presence or absence of fluid rotation often determines the character of a flow, and this dependence leads to two additional kinematic concepts related to fluid rotation. First, fluid motion is called irrotational if:
 (3.17)
(3.17)
When (3.17) is true, the fluid velocity u can be written as the gradient of a scalar function ϕ(x,t) because u i = ∂ ϕ / ∂ x i  satisfies the condition of irrotationality (see Exercises 2.6 and 2.22). Although this may seem to be an unnecessary mathematical complication, finding a scalar function ϕ(x,t) such that ∇ϕ solves the irrotational equations of fluid motion is sometimes easier than solving these equations directly for the vector velocity u(x,t) in the same circumstance.
satisfies the condition of irrotationality (see Exercises 2.6 and 2.22). Although this may seem to be an unnecessary mathematical complication, finding a scalar function ϕ(x,t) such that ∇ϕ solves the irrotational equations of fluid motion is sometimes easier than solving these equations directly for the vector velocity u(x,t) in the same circumstance.
satisfies the condition of irrotationality (see Exercises 2.6 and 2.22). Although this may seem to be an unnecessary mathematical complication, finding a scalar function ϕ(x,t) such that ∇ϕ solves the irrotational equations of fluid motion is sometimes easier than solving these equations directly for the vector velocity u(x,t) in the same circumstance.The second concept related to fluid rotation is the extension of the vorticity, twice the fluid rotation rate at a point, to the circulation Γ, the amount of fluid rotation within a closed contour (or circuit) C. Here the circulation Γ is defined by:
 (3.18)
(3.18)
where ds is an element of C, and the geometry is shown in Figure 3.12. The loop through the first integral sign signifies that C is a closed circuit and is often omitted. The second equality in (3.18) follows from Stokes’ theorem (Section 2.13) and the definition of the vorticity ω = ∇ × u  . The second equality requires the line integral of u around a closed curve C to be equal to the flux of vorticity through the arbitrary surface A bounded by C. Here, and elsewhere in this text, the term flux is used for the integral of a vector field normal to a surface. Equation (3.18) allows ω to be identified as the circulation per unit area. This identification also follows directly from the definition of the curl as the limit of the circulation integral (see (2.35)).
. The second equality requires the line integral of u around a closed curve C to be equal to the flux of vorticity through the arbitrary surface A bounded by C. Here, and elsewhere in this text, the term flux is used for the integral of a vector field normal to a surface. Equation (3.18) allows ω to be identified as the circulation per unit area. This identification also follows directly from the definition of the curl as the limit of the circulation integral (see (2.35)).
. The second equality requires the line integral of u around a closed curve C to be equal to the flux of vorticity through the arbitrary surface A bounded by C. Here, and elsewhere in this text, the term flux is used for the integral of a vector field normal to a surface. Equation (3.18) allows ω to be identified as the circulation per unit area. This identification also follows directly from the definition of the curl as the limit of the circulation integral (see (2.35)).Returning to the situation in Figure 3.9, equations (3.11) through (3.14) allow (3.10) to be rewritten:
 (3.19)
(3.19)
where εijkωkdxj is the i-component of the cross product −ω × dx (see (2.21)). Thus, the meaning of the second term in (3.19) is can be deduced as follows. The velocity at a distance x from the axis of rotation of a rigid body rotating at angular velocity Ω is Ω × x. The second term in (3.19) therefore represents the velocity of point P relative to point O because of an angular velocity of ω/2.
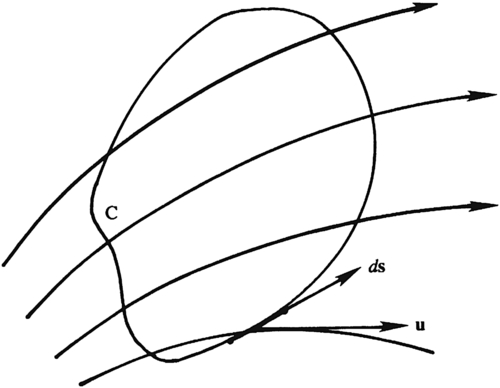
Figure 3.12 The circulation around the closed contour C is the line integral of the dot product of the velocity u and the contour element ds.
The first term in (3.19) is the relative velocity between point P and point O caused by deformation of the fluid element defined by dx. This deformation becomes particularly simple in a coordinate system coinciding with the principal axes of the strain-rate tensor. The components Sij change as the coordinate system is rotated, and for one particular orientation of the coordinate system, a symmetric tensor has only diagonal components; these are called the principal axes of the tensor (see Section 2.12 and Example 2.11). Denoting the variables in this principal coordinate system by an over bar (Figure 3.13), the first part of (3.19) can be written as:
 (3.20)
(3.20)
Here, S ¯ 11  ,
, S ¯ 22  , and
, and S ¯ 33  are the diagonal components of S in the principal-axis coordinate system and are called the eigenvalues of S. The three components of (3.20) can be written:
are the diagonal components of S in the principal-axis coordinate system and are called the eigenvalues of S. The three components of (3.20) can be written:
, , and are the diagonal components of S in the principal-axis coordinate system and are called the eigenvalues of S. The three components of (3.20) can be written: (3.21)
(3.21)
Consider the significance of d u ¯ 1 = S ¯ 11 d x ¯ 1  when
when S ¯ 11 x ¯ 1  -direction at a rate proportional to the distance
-direction at a rate proportional to the distance d x ¯ 1  . Considering all points on the surface of a sphere centered on O and having radius |dx| (see Figure 3.13), the movement of P in the
. Considering all points on the surface of a sphere centered on O and having radius |dx| (see Figure 3.13), the movement of P in the x ¯ 1 d x ¯ 1 d x ¯ 1 ( x ¯ 1 , x ¯ 2 )  -plane for the case where
-plane for the case where S ¯ 11 S ¯ 22
when is positive. This equation implies that point P in Figure 3.9 is moving away from point O in the -direction at a rate proportional to the distance . Considering all points on the surface of a sphere centered on O and having radius |dx| (see Figure 3.13), the movement of P in the -direction is maximum when P coincides with point M (where = |dx|) and is zero when P coincides with point N (where = 0). Figure 3.13 illustrates the intersection of this sphere with the -plane for the case where > 0 and < 0; the deformation in the x3 direction is not shown in this figure. In a small interval of time, a spherical fluid element around O therefore becomes an ellipsoid whose axes are the principal axes of the strain-rate tensor S.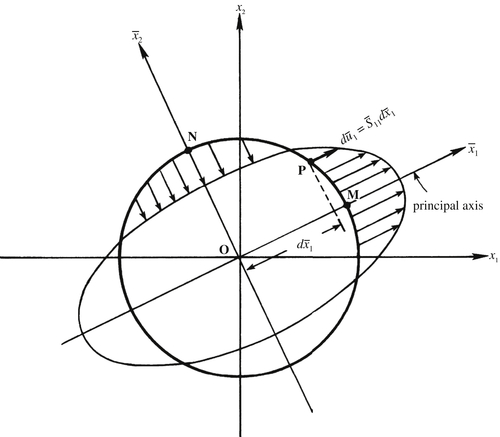
Figure 3.13 Deformation of a spherical fluid element into an ellipsoid. Here only the intersection of the element with the plane defined by the first and second coordinate directions is shown.
Example 3.4
A steady two-dimensional flow field incorporating fluid element rotation and strain is given in (x,y)-Cartesian coordinates by u = ( u , v ) = ( q y / x 2 , q y 2 / x 3 )  where q is a positive constant with units of area/time. Sample profiles of u(x,y) vs. y are shown at two x-locations in Figure 3.14. Determine the streamlines, vorticity, and strain rate tensor in this flow away from x = 0. What are the equations of the streamlines along which the x- and y-axes are aligned with the principal axes of the flow?
where q is a positive constant with units of area/time. Sample profiles of u(x,y) vs. y are shown at two x-locations in Figure 3.14. Determine the streamlines, vorticity, and strain rate tensor in this flow away from x = 0. What are the equations of the streamlines along which the x- and y-axes are aligned with the principal axes of the flow?
where q is a positive constant with units of area/time. Sample profiles of u(x,y) vs. y are shown at two x-locations in Figure 3.14. Determine the streamlines, vorticity, and strain rate tensor in this flow away from x = 0. What are the equations of the streamlines along which the x- and y-axes are aligned with the principal axes of the flow?Solution
Utilize the first equality in (3.7) to find:
Integrating once produces: ln(y) = ln(x) + const. Exponentiate both sides to find y = mx, where m is another constant. Thus the flow's streamlines are straight lines with slope m that pass through the origin of coordinates (such as the dashed line in Figure 3.14).
For two-dimensional flow in the (x,y)-plane, there is only a z-component of vorticity. For the given flow field it is:

Thus, all fluid elements rotate clockwise at a position dependent rate.
The strain rate tensor for this flow is:

In the first quadrant where x and y are both positive, fluid elements contract in the x-direction and expand in the y-direction. For the streamlines y = ± x / 3  , the off-diagonal terms of the strain rate tensor are zero, so the x- and y-axes are aligned with the flow's principal axes along these streamlines.
, the off-diagonal terms of the strain rate tensor are zero, so the x- and y-axes are aligned with the flow's principal axes along these streamlines.
, the off-diagonal terms of the strain rate tensor are zero, so the x- and y-axes are aligned with the flow's principal axes along these streamlines.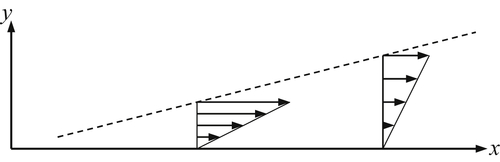
Figure 3.14 Sample horizontal velocity profiles at two downstream locations for the flow field specified in Example 3.4. The dashed line intersects the origin.
Summary
The relative velocity in the neighborhood of a point can be divided into two parts. One part comes from rotation of the element, and the other part comes from deformation of the element. When element rotation is absent, a spherical element deforms into an ellipsoid whose axes coincide with the principal axes of the local strain-rate tensor.
3.5. Kinematics of Simple Plane Flows
In this section, the rotation and deformation of fluid elements in two simple steady flows with straight and circular streamlines are considered in two-dimensional (x1,x2)-Cartesian and (r,θ)-polar coordinates, respectively. In both cases, the flows can be described with a single independent spatial coordinate that increases perpendicular to the flow direction.
First consider parallel shear flow where u = (u1(x2), 0) as shown in Figure 3.15. The lone nonzero velocity gradient is γ(x2) ≡ du1/dx2, and, from (3.16), the only nonzero component of vorticity is ω3 = −γ. In Figure 3.15, the angular velocity of line element AB is −γ, and that of BC is zero, giving −γ/2 as the overall angular velocity (half the vorticity). The average value does not depend on which two mutually perpendicular elements in the (x1,x2)-plane are chosen to compute it.
In contrast, the components of the strain rate do depend on the orientation of the element. From (3.11), Sij for a fluid element such as ABCD, with sides parallel to the x1,x2-axes, is:
which shows that there are only off-diagonal elements of S. Therefore, the element ABCD undergoes shear, but no normal strain. As discussed in Section 2.11 and Example 2.11, a symmetric tensor with zero diagonal elements can be diagonalized by rotating the coordinate system through 45°. It is shown there that, along these principal axes (denoted by an overbar in Figure 3.13), the strain rate tensor is:

so that along the first principle axis there is a linear extension rate of γ/2, along the second principle axis there is a linear compression rate of –γ/2, and no shear. This can be seen geometrically in Figure 3.15 by examining the deformation of an element PQRS oriented at 45°, which deforms to P′Q′R′S′. It is clear that the side PS elongates and the side PQ contracts, but the angles between the sides of the element remain 90°. In a small time interval, a small spherical element in this flow would become an ellipsoid oriented at 45° to the x1, x2-coordinate system. However, elements in this shear flow still rotate, so the orientation of this ellipsoid changes as time progresses.

Figure 3.15 Deformation of elements in a parallel shear flow. The element is stretched along the principal axis x ¯ 1 x ¯ 2  . The lengths of the sides of ADCB remain unchanged while the corner angles of SRQP also remain unchanged.
. The lengths of the sides of ADCB remain unchanged while the corner angles of SRQP also remain unchanged.
and compressed along the principal axis . The lengths of the sides of ADCB remain unchanged while the corner angles of SRQP also remain unchanged.In summary, the element ABCD in a parallel shear flow deforms via shear without normal strain, whereas the element PQRS deforms via normal strain without shear strain. And, both elements rotate at the same angular velocity.
Now consider two steady vortex flows having circular streamlines. In (r,θ)-polar coordinates, both flows are defined by ur = 0 and u θ  =
= u θ ( r )  , with the first one being solid body rotation:
, with the first one being solid body rotation:
= , with the first one being solid body rotation: (3.22)
(3.22)
where ω0 is a constant equal to the angular velocity of each particle about the origin (Figure 3.16). Such a flow can be generated by steadily rotating a cylindrical tank containing a viscous fluid about its axis and waiting until the transients die out. From Appendix B, the vorticity component in the z-direction perpendicular to the (r,θ)-plane is:
 (3.23)
(3.23)
which is independent of location. Thus, each fluid element is rotating about its own center at the same rate that it rotates about the origin of coordinates. This is evident in Figure 3.16, which shows the location of element ABCD at two successive times. The two mutually perpendicular fluid lines AD and AB both rotate counterclockwise (about the center of the element) with speed ω0. The time period for one rotation of the particle about its own center equals the time period for one revolution around the origin of coordinates. In addition, S = 0 for this flow so fluid elements do not deform and each retains its location relative to other elements, as is expected for solid body rotation.
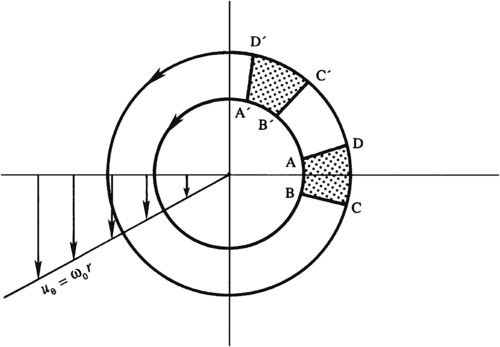
Figure 3.16 Solid-body rotation. The streamlines are circular and fluid elements spin about their own centers at the same rate that they revolve around the origin. There is no deformation of the elements, only rotation.
The circulation around a circuit of radius r in this flow is:
 (3.24)
(3.24)
which shows that circulation equals the vorticity, 2ω0, times the area contained by C. This result is true for any circuit C, regardless of whether or not it contains the origin (see Exercise 3.25).
Another flow with circular streamlines is that from an ideal vortex line oriented perpendicular to the (r,θ)-plane. Here, the θ-component of fluid velocity is inversely proportional to the radius of the streamline and the radial velocity is again zero:
 (3.25)
(3.25)
where B is a constant. From (3.23), the vorticity in this flow at any point away from the origin is ωz = 0, but the circulation around a circuit of radius r centered on the origin is a nonzero constant:
 (3.26)
(3.26)
independent of r. Thus, considering vorticity to be the circulation per unit area, as in (3.18) when n = ez, then (3.26) implies that the flow specified by (3.25) is irrotational everywhere except at r = 0 where the vorticity is infinite with a finite area integral:
 (3.27)
(3.27)
Although the circulation around a circuit containing the origin in an irrotational vortex flow is nonzero, that around a circuit not containing the origin is zero. The circulation around the contour ABCD (Figure 3.17) is:

The line integrals of u·ds on BC and DA are zero because u and ds are perpendicular, and the remaining parts of the circuit ABCD produce:

where the line integral along AB is negative because u and ds are oppositely directed, and the final equality is obtained by noting that the product u θ
r = B is a constant. In addition, zero circulation around ABCD is expected because of Stokes’ theorem and the fact that the vorticity vanishes everywhere within ABCD.Real vortices, such as a bathtub vortex, a wing-tip vortex, or a tornado, do not mimic solid body rotation over large regions of space, nor do they produce unbounded fluid velocity magnitudes near their axes of rotation. Instead, real vortices combine elements of the ideal vortex flows described by (3.22) and (3.25). Near the center of rotation, a real vortex’s core flow is nearly solid-body rotation, but far from this core, real-vortex-induced flow is nearly irrotational. Two common idealizations of the this behavior are the Rankine vortex defined by:
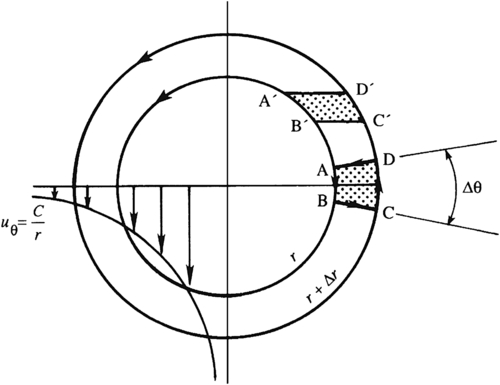
Figure 3.17 Irrotational vortex. The streamlines are circular, as for solid body rotation, but the fluid velocity varies with distance from the origin so that fluid elements only deform; they do not spin. The vorticity of fluid elements is zero everywhere, except at the origin where it is infinite.
 (3.28)
(3.28)
and the Gaussian vortex defined by:
 (3.29)
(3.29)
In both cases, σ is a core-size parameter that determines the radial distance where real vortex behavior transitions from solid-body rotation to irrotational-vortex flow. For the Rankine vortex, this transition is abrupt and occurs at r = σ where u θ u θ
reaches its maximum. For the Gaussian vortex, this transition is gradual and the maximum value of is reached at r/σ ≈ 1.12091 (see Exercise 3.28).Example 3.5
The two-dimensional flow described in Cartesian coordinates by u = (Ax,–Ay), where A is a constant, produces pure straining motion. Determine the streamlines, vorticity, and strain rate tensor in this flow, and sketch fluid element shapes in the first quadrant when A is positive.
Solution
Again, utilize the first equality in (3.7) to find:
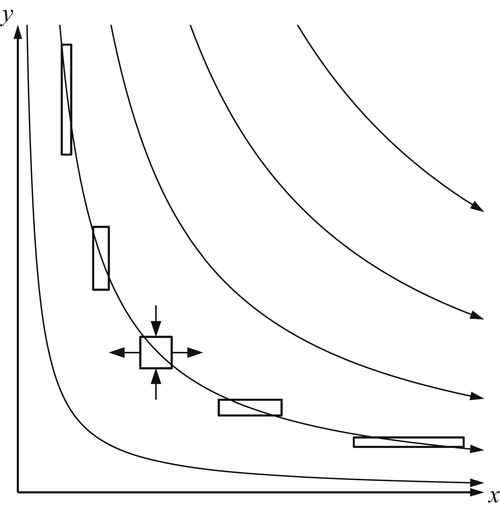
Figure 3.18 Sketch of the flow for Example 3.5 in x-y coordinates. The streamlines are hyperbolae. Arrowheads at the right side show the flow direction. A rectangular fluid element changes shape as it passes through the flow field following the second streamline. It does not rotate but it lengthens in the x-direction and contracts in the y-direction. Arrows indicating this strain are shown when the element is square.
Integrating once produces: ln(y) = –ln(x) + const., or ln(y) + ln(x) = const. Exponentiate both sides to find xy = c, where c is another constant. Thus, the flow's streamlines are hyperbolae that asymptote to the x- and y-axes.
For two-dimensional flow in the (x,y)-plane, there is only a z-component of vorticity. For the given flow field it is:

Thus, fluid elements do not rotate in this flow.
The strain rate tensor for this flow is:

Thus, the x- and y-axes are principle axes, and, when A is positive, fluid elements expand in the x-direction and contract in the y-direction. A sketch of these flow results appears in Figure 3.18.