4.4.3 Differential forms taking values in a fiber bundle. List of formulas
The next section reproduces the presentation of [BOU 82a], sections 7.3 and 7.8, with slight changes to the order and a few simplifications.
(I) Let π : N → B be a vector bundle and consider the vector bundle Alt p (M; N) (M = T (B)) whose fiber over an arbitrary point b ∈ B is Alt p (M; N) b := Alt p (M b ; N b ) (section 4.2.6, Example 4.14(3)). If N is the trivial bundle B × F, where F is a Banach space, write Alt p (M; F) for Alt p (M; N).
Clearly, for any open subset U of B, Ω
p
(U ; N) is a
 -module and the mapping U → Ω
p
(U ; N) is a sheaf of
-module and the mapping U → Ω
p
(U ; N) is a sheaf of
 -Modules.
-Modules.
(II) Exterior product
Let π
i
: N
i
→ B (i = 1,2) and π : N → B be three vector bundles of class C
r
and Φ a mapping from N
1 ×
Β
N
2 into N. Suppose that, for every b
0 ∈ B, there exist an open neighborhood U of b
0 in B and vector charts t
i
= (U
i
, φ
i
, F
i
) of π
i
(i = 1, 2) and t = (U, φ, F) of π, together with a mapping λ of class C
r
in
 , satisfying the following condition: for every b ∈ U and all (x
1, x
2) ∈ F
1 × F
2 (with the notation of Definition 3.22(i), Condition (V)),
, satisfying the following condition: for every b ∈ U and all (x
1, x
2) ∈ F
1 × F
2 (with the notation of Definition 3.22(i), Condition (V)),

Suppose that one such coupling is given and let M be a fiber bundle with base B and of class C r . For every b ∈ B, there is a continuous bilinear mapping

The collection of these continuous bilinear mappings determines a coupling

Given sections ω 1, ω 2 of Alt p (M; N 1) and Alt q (M; N 2) on U, the section u (ω 1, ω 2) of Alt p + q (M; N) on U is written as ω 1 ∧Φ ω 2 (see Remark 4.18).
If the s i (i = 1, …, p + q) are morphic sections of M on U, then:
where the sum ranges over permutations of {1, …, p + q} such that σ (1) < … < σ (p) and σ (p + 1) < … < σ (p + q) (see Lemma-Definition 4.10(i)).
(III) De Rham algebra: generalization
An algebra bundle of base B is a vector bundle A of base B equipped with a coupling from A ×
Β
A into A. In the following, the fibers A
b
(b ∈ B) are assumed to be associative and commutative algebras with neutral element e
b
([P1], section 2.3.10(I)). Let π : M → B be a vector bundle with base B (e.g. T (B)). Write Ω
p
(U; A) (where U is an open subset of B) for the
-module formed by the morphic sections of Alt
p
(M; A) on U.
The exterior product allows the direct sum Ω(U; A) = ⊕ p ≥ 0Ω p (U; A) to be equipped with the structure of an associative, anticommutative and graduated algebra, again called the de Rham algebra (section 4.4.1(III)).
If ω = ω 1 ∧ … ∧ ω p , where ω i ∈ Ω1 (U; A), and s i is a morphic section of M on U (i = 1,…, p), then (see [4.21]):

(IV) Interior product Let p ≥ 1. There exists a coupling i from M × Β Alt p (M; A) into Alt p–1 (M; A) whose restriction to each fiber is the interior product (Remark 4.12). If s is a section of M on the open subset U of B and ω ∈ Ω p (U; A), write i (s) ω for the section i (s, ω) of Alt p–1 (M; A) on U. Then, for every b ∈ U,

We say that i (s) ω is the interior product of s and ω. From this definition and the formulas listed in section 4.2.5, we can deduce the following relations (where the s j are sections of M):
The interior product is an antiderivation of degree – 1 of the de Rham algebra ([P1], section 2.3.12).
(V) Preimage Let f : B′ → B be a morphism of manifolds and ω ∈ Ω p (B; N). Let f ⁎ (N) be the preimage of N under f (section 3.4.6). There exists a uniquely determined differential p-form f ⁎ (ω) such that [4.22] holds (mutatis mutandis). For every family of vector fields X′1, …, X′ p of class C r on B′, the mapping

is a lifting of f into N (Definition 3.6, section 3.3.1).
In particular, a differential 0-form G on B′ taking values in N is in fact just a lifting of class C r of f into N, i.e. a mapping (of class C r ) G : B′ → N such that G (b′) ∈ N f (b′) for all b′ ∈ B′.
(VI) Vector-valued differential forms
The fiber bundle Ω
p
(B; N) is trivial if and only if N is trivial (section 3.4.1, Example 3.26(a)), or in other words N = B × F, where F is a Banach space (exercise). If so, the fibers N
b
can be identified with F. We write Alt
p
(M; F) for Alt
p
(M; N), Ω
p
(B; F) for Ω
p
(B; N), and we say that ω is a vector-valued differential p-form taking values in F. In particular, if
 , N = T (B), and
, N = T (B), and
 , then ω is a complex differential p-form on the real manifold B.
, then ω is a complex differential p-form on the real manifold B.
The usual fiber bundle
 can also be written as
can also be written as
 , and
, and

Remark 4.33
The space of differential p-forms on an
 or
or
 manifold can be defined using
[4.25]
(
[KRI 97]
,
Chapter VII
, section 33).
manifold can be defined using
[4.25]
(
[KRI 97]
,
Chapter VII
, section 33).
4.4.4 Orientation
For the rest of this chapter, excluding section 4.5.1, every manifold is a locally finite-dimensional differential manifold and F always denotes a Banach space.
(I) Orientation of a vector space
Let E be a real m-dimensional vector space. We know that
 (section 4.2.3(I)), so
(section 4.2.3(I)), so
 is the union of two closed half-lines on the real axis with opposite directions and origin 0. These half-lines are written as O and –O. The set {O, –O} formed by these half-lines is written as Or (E).
is the union of two closed half-lines on the real axis with opposite directions and origin 0. These half-lines are written as O and –O. The set {O, –O} formed by these half-lines is written as Or (E).
(II) Orientation of a real manifold Let Β be a manifold and M = T (B). Write

Lemma 4.34
Let
 be the mapping defined by
be the mapping defined by
 for every b ∈ Β. There exists a unique topological space structure on Or
M
for which the following two conditions are satisfied:
for every b ∈ Β. There exists a unique topological space structure on Or
M
for which the following two conditions are satisfied:
-
i)
 is continuous.
is continuous.
- ii) If s is a continuous, everywhere non-zero section of the vector bundle det (M) (whose fibers are the det (M b ), b ∈ Β, with the notation of (I), implying that s(b) ∈ det (M b ) = O(b) ∪ (− O((b))) on an open subset U of Β and s (b) ∈ O (s (b)) for every b ∈ U, then the mapping B → Or M : b ↦ O (s (b)) is continuous (exercise).
Suppose that the topological space Or
M
is equipped with the manifold structure determined by taking the preimage under
of the manifold structure of Β (Remark 2.44), and consider the fibration
 . The multiplicative group {± 1} acts simply transitively (and hence freely) ([P1], section 2.2.8(II)) on Or
M
by O ↦ –O. The manifold of orbits of this action is Or
M
\{± 1} ≅ B.
. The multiplicative group {± 1} acts simply transitively (and hence freely) ([P1], section 2.2.8(II)) on Or
M
by O ↦ –O. The manifold of orbits of this action is Or
M
\{± 1} ≅ B.
Corollary-Definition 4.35
-
1)
The fibration π : Or
M
→ Β is a principal bundle with structural group {± 1}. This principal bundle
 is a covering of Β with fiber type {± 1} (
section 3.3.3
), namely a covering of two leaves.
is a covering of Β with fiber type {± 1} (
section 3.3.3
), namely a covering of two leaves.
-
2)
The principal bundle
is said to be the orientation covering. An orientation of Β is a continuous section O : b ↦ (b, O
b
) of
 . If any such section exists, the pair (B, O) is said to be an oriented manifold. The orientations O and –O are said to be opposite.
. If any such section exists, the pair (B, O) is said to be an oriented manifold. The orientations O and –O are said to be opposite.
- 3) A manifold B is said to be orientable if there exists an orientation on B.
-
4)
A pure m-dimensional manifold B is orientable if and only if one of the following equivalent conditions is satisfied:
-
i)
The orientation covering
is the trivial bundle B × {± 1}.
- ii) There exists a continuous differential m-form v 0 such that v 0 (b) ≠ 0 for every b ∈ B; if so, v 0 is of class C ∞, i.e. v 0 ∈ Ω m (B). Since dim (Ω m (B)) b = 1, the sign of v 0 (b) must be constant on B, and v 0 determines an orientation O : b ↦ (b, sgn (v 0 (b))) of B (where sgn denotes the sign).
-
iii)
There exists an atlas of B whose charts (U
i
, φ
i
, n
i
) satisfy the property that, if U
i
∩ U
j
≠ ∅ (which implies n
i
= n
j
), then
on U i ∩ U j .
-
i)
The orientation covering
-
5)
Hence, if B is a pure orientable m-dimensional manifold, then the relation ∼ on Ω
m
(B) defined by v ∼ v′ if sgn (v (b)) = sgn (v′ (b)) (where b is an arbitrary point of B) is an equivalence relation. The orientation O : b ↦ (b, sgn (v (b))) is the equivalence class of v, written as
 .
.
Corollary 4.36
- 1) Let B be a manifold and b some point of B. By Corollary-Definition 4.35 (4), there exists an open neighborhood U of b in B that is orientable.
- 2) A manifold B is orientable if and only if each of its connected components is orientable.
-
3)
Let (B, O) be a pure m-dimensional oriented manifold and v
0 ∈ O. Every differential m-form ω ∈ Ω
m
(B) can be uniquely written in the form ω = f.v
0, where
 is of class C
∞. Given b ∈ B, write
is of class C
∞. Given b ∈ B, write
 if
if
 .
.
- 4) Let (B, O) be a pure m-dimensional oriented manifold. If ω ∈ Ω m (B; F), there exists a unique mapping f : B → F of class C ∞ satisfying ω = f.v 0 (exercise).
Definition 4.37
Let (B, O) be an oriented manifold and v 0 ∈ O. A sequence (Z 1,…, Z m ) of vector fields is said to be positive or direct (respectively negative or retrograde) if, for every b ∈ B,

Example 4.38
-
i)
The space
 is orientable and the canonical m-form dx
1 ∧ … ∧ dx
m
(where x
i
is the i-th coordinate function in the canonical basis) defines its canonical orientation.
is orientable and the canonical m-form dx
1 ∧ … ∧ dx
m
(where x
i
is the i-th coordinate function in the canonical basis) defines its canonical orientation.
- ii) More generally, the underlying manifold of a finite-dimensional real Lie group G is always orientable. Indeed, suppose that G is m-dimensional, and let z ∨ be an m-covector such that z e ∨ ≠ 0 (where e is the neutral element); then the differential m-form g ↦ γ (g) z ∨ (of class C ω ), where γ is left translation ( section 2.4.1 ( I )), is non-zero at every point.
- iii) Every simply connected manifold and every parallelizable manifold ( Definition 3.28 ) is orientable ( [NAR 73] , Corollary 2.7.6; [LEE 02] , Proposition 10.5).
-
iv)
In particular, the sphere
 (see footnote 2, p. 98) is orientable.
(see footnote 2, p. 98) is orientable.
- v) Every finite product of orientable manifolds is orientable. If B 1, B 2 are two manifolds with orientations O 1, O 2 respectively, the mapping (b 1, b 2) ↦ O b1 O b2 is an orientation of B 1 × B 2 written as O 1 ⊗ O 2.
- vi) Let B bean oriented manifold with orientation O. Let U be a submanifold of B. The mapping O | U is an orientation of U. Hence, every submanifold of an orientable manifold is orientable.
- vii) It can be shown that any finite-dimensional pure differential manifold B 0 underlying a holomorphic manifold B is orientable ( [DIE 93] , Volume 3, (16.21.13)).
- viii) The Möbius strip (see Figure 3.2 in section 3.3.1 and footnote 3, p. 98) and the Klein bottle (see footnote 6, p. 70) are not orientable. The Möbius strip is a striking example of a non-orientable manifold: any reader who wishes to experiment with the concept of orientation can make a Möbius strip by gluing together the two ends of a strip of paper with a half-twist. Now, draw a pencil line along the middle of the strip – the line will almost magically reach “the other side” of the strip from the starting point.
Let (B, O) be an oriented manifold. If we write this oriented manifold as
 , we can write
, we can write
 or
or
 for the manifold equipped with the opposite orientation.
for the manifold equipped with the opposite orientation.
4.4.5 Integral of a differential form of maximal degree
(I) Volume integrals in
Lemma 4.39
Let U, U′ be open subsets of
and u : U → U′ a diffeomorphism. For every x ∈ U, let
 be the Jacobian of u (
section 1.2.2
(
IV
)). Let λ
U
⊗ m
≔ λ
⊗ m
|
U
and λ
U
′
⊗ m
be the Radon measures induced on U and U′, respectively, by the Lebesgue measure on
([P2], section 4.1.5(I)). Then, the image of | J |. λ
U
⊗ m
under u is λ
U
′
⊗ m
([P2], section 4.1.5(II)); in other words, for every function
be the Jacobian of u (
section 1.2.2
(
IV
)). Let λ
U
⊗ m
≔ λ
⊗ m
|
U
and λ
U
′
⊗ m
be the Radon measures induced on U and U′, respectively, by the Lebesgue measure on
([P2], section 4.1.5(I)). Then, the image of | J |. λ
U
⊗ m
under u is λ
U
′
⊗ m
([P2], section 4.1.5(II)); in other words, for every function
 , where
, where
 denotes the space (of type
denotes the space (of type
 ) of compactly supported continuous functions from U′ into
) of compactly supported continuous functions from U′ into
 ([P2], section 4.1.4(IV)), we have the following change of variable formula, by
[4.24]
:
([P2], section 4.1.4(IV)), we have the following change of variable formula, by
[4.24]
:

This relation still holds if we replace
by a λ
⊗ m
-integrable mapping f : U′ ↦ F ([P2], section 4.1.2).
Example 4.40
Let U and U′ be two open intervals on the real line and u a diffeomorphism from U onto U′. Let f be a continuous function on U taking values in the Banach space F
. The function t ↦ u (t) is monotone, so
 has constant sign ε on U, and:
has constant sign ε on U, and:

Example 4.41
Let us calculate the volume V of a sphere of radius R.
-
1)
Cartesian coordinates. Pick the center of the sphere as the origin, and begin by calculating the volume of the hemisphere z ≥ 0. We can use the Fubini-Tonelli theorem ([P2], section 4.1.3(III)) to do this by cutting the hemisphere into “slices” of infinitely small thickness dz. Each slice is a cylinder with a circular cross-section of radius
 and thickness dz. The volume of the hemisphere is therefore given by
and thickness dz. The volume of the hemisphere is therefore given by
which gives us the classical formula .
.
-
2)
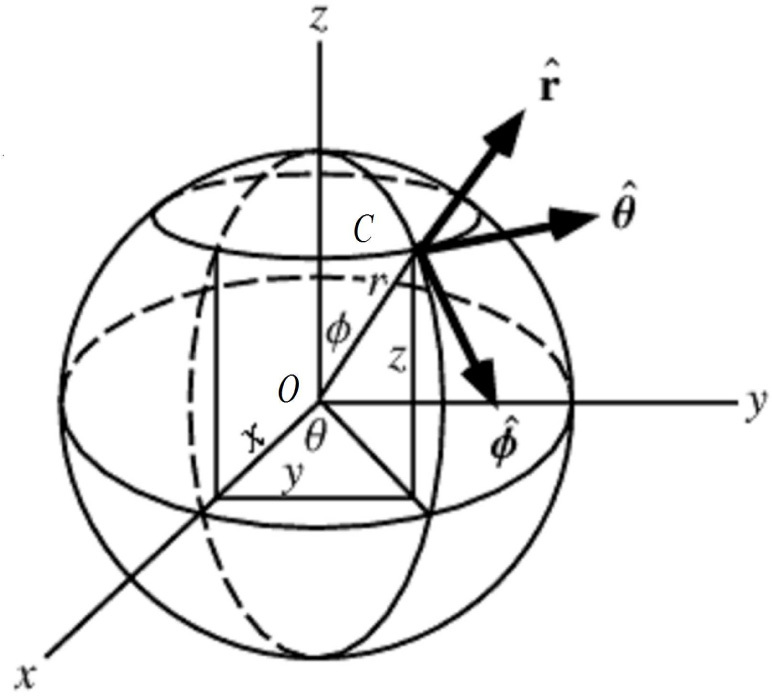
Spherical coordinates. In mathematics, the radial, azimuthal, and zenithal coordinates {r, ϕ, θ} are defined as shown in
Figure 4.1
, with r ≥ 0, 0 ≤ θ ≤ 2π, and 0 ≤ ϕ ≤ π (in physics, the symbols θ and ϕ are often swapped). These coordinates satisfy the relations:
Hence, by Lemma 4.39 ,
Let C be the point with Cartesian coordinates (x, y, z). Then, , where
, where
 ,
,
 ,
,
 are the vectors of the canonical basis. In spherical coordinates, write
are the vectors of the canonical basis. In spherical coordinates, write
 ,
,
 ,
,
 for the unit vector along the direction of
for the unit vector along the direction of
 , the unit vector tangent to the meridian in the direction of increasing ϕ, and the unit vector parallel to C in the direction of increasing θ, respectively. Then
,
, the unit vector tangent to the meridian in the direction of increasing ϕ, and the unit vector parallel to C in the direction of increasing θ, respectively. Then
,
 ,
,
 with
with
 , so
, so
The orthonormal frame is positively oriented, since the determinant
[4.27]
is positive.
is positively oriented, since the determinant
[4.27]
is positive.
-
3)
Calculation based on the radial coordinate, the longitude, and the latitude. The coordinates are now (r, φ, λ) (see
Example 2.12
,
section 2.2.1
(
II
)). In radians, the latitude φ and the longitude λ may now be expressed as a function of the zenith φ and the azimuth θ by
 and λ = θ – π. Starting from the expressions
[2.1]
, an analogous calculation gives dxdydz = r
2 cos φdrdφdλ, and
and λ = θ – π. Starting from the expressions
[2.1]
, an analogous calculation gives dxdydz = r
2 cos φdrdφdλ, and





(II) Lebesgue measures
Corollary-Definition 4.42
Let B be a pure m-dimensional manifold. There exists a positive Radon measure μ on B ([P2], section 4.1.5(V)) with the following properties:
- i) For every chart c = (U, φ, m) of Β, the image under φ ([P2], section 4.1.5(II)) of the induced measure μ U is of the form f c . λ φ(U) ⊗ m , where f c is a function of class C ∞ that does not vanish on φ (U).
- ii)
In other words, for every function
 ,
,
- iii) Any Radon measure μ with the property (i) is said to be Lebesgue on B. Any two Lebesgue measures μ, μ′ on B are equivalent in the sense that each is absolutely continuous with respect to the other ([P2], section 4.1.6(III)) and each has a density function ofclass C ∞ with respect to the other.

(III) Integral of a form of maximal degree over an
m
-dimensional oriented manifold
Let
be a pure oriented manifold of dimension m ≥ 0 and let ω be a differential m-form taking values in a Banach space F. our next task is to give meaning to the quantity

By Corollary-Definition 4.35(5), there exists a differential m-form v
0 ∈ Ω
m
(B) that belongs to the orientation of
. Let c = (U, φ, m) be a chart of B such that the open set U is connected. For every point ζ = (ζ1,…, ζ
m
) ∈ φ (U), we can write (with the same notation as above):

Since U is connected, f c is of class C ∞ and has constant sign in φ (U). Let μ v 0, U , U be the positive Radon measure on U defined by

If we proceed in the same way for another arbitrary chart c′ = (U′, φ′, m) of B, where U′ is also connected, we obtain a measure μ v 0, U ′ that is positive on U′. It is easy to show ([DIE 93], Volume 3, (16.24.1)) that, if U ∩ U ′ ≠ ∅, the restrictions of μ v 0, U and μ v 0, U ′ ′ to U ∩ U ′ are equal. The positive measures μ v 0, U (as U ranges over the set of connected open subsets of B, which form a covering of B) are, therefore, the restrictions to U of a unique positive Radon measure μ v 0 (which is Lebesgue) defined on B. With the same hypotheses and notation as Corollary 4.36(4):
Corollary-Definition 4.43
The differential m-form ω is said to be integrable (over
)if f is μ
v
0
-integrable. If so, define:

This quantity only depends on the orientation of
and not on the particular choice of v
0 made to specify this orientation.
Let ω ∈ Ω
m
(B; F) be an integrable differential m-form on
taking values in F. With the notation introduced at the end of section 4.4.4
(II):
If
 and ω ∈ Ω
m
(B; F), then g.ω is a continuous m-form and
and ω ∈ Ω
m
(B; F), then g.ω is a continuous m-form and
 is a Radon measure [ω] taking values in F ([P2], section 4.1.5(VIII)).
7
is a Radon measure [ω] taking values in F ([P2], section 4.1.5(VIII)).
7
Definition 4.44
The Radon measure [ω] defined on B is called the volume form on
determined by the differential m-form ω.
The above leads to the following result ([DIE 93], Volume 3, (16.24.2)):
Corollary 4.45
If ω ∈ Ω
m
(B) belongs to the orientation of
, then the volume form

is a positive Lebesgue measure on
. Conversely, every positive Lebesgue measure on
is of the form [ω], ω ∈ Ω
m
(B).
(IV) Orientation of a morphism
Definition 4.46
Let B, B′ be locally finite-dimensional manifolds and f : B → B′ a morphism. An orientation of f is a morphism
 that makes the diagram
that makes the diagram
commute and which is compatible with the group action {± 1}. In other words,
 . We write that
. We write that
 , ε ∈ {–1, 1}.
, ε ∈ {–1, 1}.
Corollary-Definition 4.47
-
1)
Let B, B′ be orientable manifolds, f : B′ → B a diffeomorphism, and
an orientation of f. Let O be an orientation of B and write
 . There exists a unique orientation O′ on B′ such that, setting
. There exists a unique orientation O′ on B′ such that, setting
 , every differential form ω ∈ Ω
m
(B; F) satisfies
, every differential form ω ∈ Ω
m
(B; F) satisfies
(exercise). The orientation O′ is said to be associated with O by .
.
- 2)
Conversely, let
,
 be two oriented manifolds and f : B′ → B a diffeomorphism. If the
relation [4.30]
is satisfied for every differential form ω ∈ Ω
m
(B; F) and ε = + 1, we say that f preserves orientations, or that f reverses orientations if ε = –1. The pair
is an orientation of f, where f is viewed as a diffeomorphism from B′ onto B (and B and B′ are the orientable manifolds underlying
and
, respectively).
be two oriented manifolds and f : B′ → B a diffeomorphism. If the
relation [4.30]
is satisfied for every differential form ω ∈ Ω
m
(B; F) and ε = + 1, we say that f preserves orientations, or that f reverses orientations if ε = –1. The pair
is an orientation of f, where f is viewed as a diffeomorphism from B′ onto B (and B and B′ are the orientable manifolds underlying
and
, respectively).
(V) Canonical orientation of the orientation covering
Let B be a manifold and
 the orientation covering (Corollary-Definition 4.35(1)). Let
the orientation covering (Corollary-Definition 4.35(1)). Let
 . The projection
. The projection
 is the linear mapping
is the linear mapping
 . Its tangent linear mapping
. Its tangent linear mapping
 is an isomorphism, so
is a local diffeomorphism (Theorem 2.61(2)), i.e. a diffeomorphism from an open subset U of
is an isomorphism, so
is a local diffeomorphism (Theorem 2.61(2)), i.e. a diffeomorphism from an open subset U of
 onto an open subset V of b. We can choose U and V to be orientable (Corollary 4.36(1)); thus, there exists an orientation
onto an open subset V of b. We can choose U and V to be orientable (Corollary 4.36(1)); thus, there exists an orientation
 of V taking the value O
b
at the point b. We have
of V taking the value O
b
at the point b. We have
 . Let ω ∈ O,
. Let ω ∈ O,
 , and
, and
 (see Corollary-Definition 4.35(5)); then
(see Corollary-Definition 4.35(5)); then
 is an orientation of B ([DIE 93], Volume 3, (16.21.6)), which gives us the following result:
is an orientation of B ([DIE 93], Volume 3, (16.21.6)), which gives us the following result:
Theorem 4.48
The manifold
is orientable.
Remark 4.49
-
(1)
The space
is a covering of two leaves. It therefore has a canonical involution
8
 that permutes these leaves over each point b ∈ B. If
that permutes these leaves over each point b ∈ B. If
 is an orientation of
, then the orientation of
associated with ι (
Corollary-Definition 4.47
) is
is an orientation of
, then the orientation of
associated with ι (
Corollary-Definition 4.47
) is
 . Therefore, both
and
are orientations of
; nevertheless, we say that
is the canonical orientation. This ambiguity is irrelevant in practice because
is unique up to permutation of the two leaves of
.
. Therefore, both
and
are orientations of
; nevertheless, we say that
is the canonical orientation. This ambiguity is irrelevant in practice because
is unique up to permutation of the two leaves of
.
-
2)
Conversely, if
 is an oriented covering of class C
∞ with two leaves and its canonical involution associates a given orientation of M with the opposite orientation, then
is isomorphic to
is an oriented covering of class C
∞ with two leaves and its canonical involution associates a given orientation of M with the opposite orientation, then
is isomorphic to
 (
[LEB 82]
,
Chapter I
, section 5.C, Theorem 2).
(
[LEB 82]
,
Chapter I
, section 5.C, Theorem 2).
4.4.6 Differential forms of odd type
(I) Definition
The fiber bundle
 associated with
of fiber type
(section 3.5.5) is called the bundle of scalars of odd type. Let N be a vector bundle of base B. A differential p-form
associated with
of fiber type
(section 3.5.5) is called the bundle of scalars of odd type. Let N be a vector bundle of base B. A differential p-form
 is said to be a differential p-form of odd type on B taking values in N. Let
be the projection. There exists a bijection
is said to be a differential p-form of odd type on B taking values in N. Let
be the projection. There exists a bijection

between the differential p-forms of odd type on B taking values in N and the differential p-forms on
taking values in
 such that
such that
 for every orientation
for every orientation
 .
.
Remark 4.50
-
a)
When B is equipped with an orientation O, the bijection
allows us to identify the usual differential p-forms ω on
with the differential p-forms of odd type
 on
. Thus, in most cases, we do not need to talk about differential forms of odd type on an oriented manifold. However, the concept of differential p-form of odd type becomes crucial on manifolds without an orientation (especially when these manifolds are non-orientable). Whenever we talk about p-forms on these manifolds, we will always be referring to differential p-forms of odd type.
on
. Thus, in most cases, we do not need to talk about differential forms of odd type on an oriented manifold. However, the concept of differential p-form of odd type becomes crucial on manifolds without an orientation (especially when these manifolds are non-orientable). Whenever we talk about p-forms on these manifolds, we will always be referring to differential p-forms of odd type.
-
b)
We also say that an ordinary differential form (belonging to Ω
p
(B; N))is even and that a differential form of odd type (belonging to
 )is odd (
[DER 84]
,
Chapter II
). This more simple terminology is adopted below.
)is odd (
[DER 84]
,
Chapter II
). This more simple terminology is adopted below.

If N is the trivial bundle B × F, we write
 for the space
, and we say that the odd p-form
for the space
, and we say that the odd p-form
 takes values in F.
takes values in F.
(II) Preimage
Let f : B → B′ be a morphism,
 an orientation of f (Definition 4.46), and
.
an orientation of f (Definition 4.46), and
.
Definition 4.51
The preimage
 is the odd differential form in
is the odd differential form in
 uniquely determined by the following property (
[BOU 82a]
, 10.4.2): let
uniquely determined by the following property (
[BOU 82a]
, 10.4.2): let
 (respectively
(respectively
 ) be the differential p-form on
) be the differential p-form on
 (respectively
) associated with
(respectively
) by the bijection
(respectively
) associated with
(respectively
) by the bijection
 from
[4.31]
; then the following relation holds:
from
[4.31]
; then the following relation holds:
(III) Exterior and interior products
Given three fiber bundles N
1, N
2, N with the same base B, a coupling Φ from N
1 ×
B
N
2 into N (Definition 4.31), and two odd differential forms
 ,
,
 , we can define the exterior product
, we can define the exterior product
 in the same way as in Definition 4.32. The coupling Φ uniquely determines a coupling
in the same way as in Definition 4.32. The coupling Φ uniquely determines a coupling
 from
from
 into
into
 , and (exercise)
, and (exercise)

If ω 1 and ω 2 are differential forms of same parity (respectively of opposite parity) (Remark 4.50(b)), then ω 1 ∧Φ ω 2 is an even (respectively odd) differential form.
The formulas satisfied by the exterior product and the interior product (section 4.4.3 (II),(IV)) also hold for odd differential forms.
(IV) Change of variable
In practical settings, an odd differential p-form
 can be expressed locally in the form [4.20]. Even differential p-forms satisfy the change-of-variable formula [4.23], whereas the corresponding formula satisfied by odd differential p-forms is as follows:
can be expressed locally in the form [4.20]. Even differential p-forms satisfy the change-of-variable formula [4.23], whereas the corresponding formula satisfied by odd differential p-forms is as follows:

where
 ([DER 84], Chapter II, section 5).
([DER 84], Chapter II, section 5).
(V) Measure defined by an odd
m
-form
Let B be an m-dimensional Hausdorff pure manifold,
 , and O
m
the canonical orientation of
(Example 4.38(i)). Let c =(U, φ, m) be a chart of B.
, and O
m
the canonical orientation of
(Example 4.38(i)). Let c =(U, φ, m) be a chart of B.
Lemma 4.52
There exists a unique mapping f c : φ (U) → F so that

We say that
is locally integrable if f
c
is locally λ
U
⊗ m
-integrable. If so, there exists a unique Radon measure
 taking values in F that satisfies the following property: for every chart c = (U, φ, m) of B,
taking values in F that satisfies the following property: for every chart c = (U, φ, m) of B,
 .
.
Definition 4.53
The Radon measure
is said to be defined by the odd differential m-form
and is also written as
.
Remark 4.54
Suppose that
 ; let
be an oriented m-dimensional manifold with orientation O. Let ω ∈ Ω
m
(B),
; let
be an oriented m-dimensional manifold with orientation O. Let ω ∈ Ω
m
(B),
 (see
[4.32]
). Unlike the Radon measure [ω] from
Definition 4.44
, the Radon measure
from
Definition 4.53
is not necessarily positive. We have the relation
(see
[4.32]
). Unlike the Radon measure [ω] from
Definition 4.44
, the Radon measure
from
Definition 4.53
is not necessarily positive. We have the relation
 ([P2], section 4.1.5(VI)). In a certain sense, the notion of an odd differential form transfers the orientation of the manifold over to the form (see
Example 4.55
).
([P2], section 4.1.5(VI)). In a certain sense, the notion of an odd differential form transfers the orientation of the manifold over to the form (see
Example 4.55
).
Example 4.55
Let Β be the cube 0 < ξ
i
< 1 in
 ; this is an open subset of
and hence a submanifold (
section 2.3.3
). Write
for the manifold B equipped with the orientation induced by the canonical orientation of
(
Example 4.38
(vi)).
; this is an open subset of
and hence a submanifold (
section 2.3.3
). Write
for the manifold B equipped with the orientation induced by the canonical orientation of
(
Example 4.38
(vi)).
-
a)
The “algebraic volume” of B (
[SCH 93]
, Volume IV,
Chapter VI
, Remark 12) is (see
Corollary 4.45
)
with ω := dξ1 ∧ dξ2 ∧ dξ3 ∈ Ω3 (B) (ordinary differential 3-form) and [ω] = λ B ⊗ 3.
Let φ : (x 1, x 2, x 3) ↦ (ξ1, ξ2, ξ3), where ξ2 = x 1, ξ1 = x 2, x 3 = ξ3. By [4.24] ,
However, φ reverses the orientation of B ( Corollary-Definition 4.47 (2)), so , and performing the change of variable φ transforms V into
, and performing the change of variable φ transforms V into
-
b)
Now consider the odd differential 3-form
 . This time, we have:
. This time, we have:
By [4.33] , , so
9
, so
9





Remark 4.56
Since the differential forms ω and
from
Example 4.55
have the same expression (dξ1 ∧ dξ2 ∧ dξ3), they are often written in the same way (even though the first belongs to Ω3 (B) and the second belongs to
 ; strictly speaking, they are distinct objects).
; strictly speaking, they are distinct objects).
4.4.7 Integration of a differential form over a chain
(I) Integration over an odd simplex
Recall that the standard m-simplex Δ
m
in
is defined by

where v
0 = 0and {
v
1, …, v
m
} is the canonical basis of
([P1], section 3.3.8(V)). Let U be an open neighborhood of Δ in
, F a Banach space, and ω ∈ Ω
m
(U; F) an even m-form (Remark 4.32(b)). Since the space
is equipped with an orientation O, we can calculate
 , where χΔ
m
is the characteristic function of Δ
m
and
, where χΔ
m
is the characteristic function of Δ
m
and
 is equipped with the orientation induced by O.
is equipped with the orientation induced by O.
Definition 4.57
Let B be a pure, metrizable, m-dimensional manifold. An odd m-simplex in B is a triple
 , where Δ
m
is the standard m-simplex in
, U is an open neighborhood of Δ
m
, σ is a mapping of class C
∞ from U into B and O is an orientation of
.
, where Δ
m
is the standard m-simplex in
, U is an open neighborhood of Δ
m
, σ is a mapping of class C
∞ from U into B and O is an orientation of
.
In algebraic topology, B is a topological space, σ is only assumed to be continuous, O is the canonical orientation of
and
 can be identified with σ. In differential geometry, where σ is of class C
∞, we sometimes specify that
is a smooth simplex.
can be identified with σ. In differential geometry, where σ is of class C
∞, we sometimes specify that
is a smooth simplex.
Let α ∈ Ω m (B; F) be an even m-form. The preimage σ ⁎ (α) is an even m-form in Ω m (U; F). Set:
(II) Integration over an even simplex Let Δ m , U, F, σ, B be as defined above.
Definition 4.58
An even m-simplex in B is a pair
 , where
, where
 is an orientation of a mapping σ of class C
∞ from U into B (
Definition 4.46
).
is an orientation of a mapping σ of class C
∞ from U into B (
Definition 4.46
).
Consider an odd differential m-form
 . Its preimage
. Its preimage
 is another odd differential m-form (Definition 4.51). Set:
is another odd differential m-form (Definition 4.51). Set:

Remark 4.59
If
 (respectively
(respectively
 ), where p < m, then
), where p < m, then
 (respectively
(respectively
 ), since we are integrating over a set of measure zero. If
), since we are integrating over a set of measure zero. If
 is an even non-homogeneous differential form Σ0 ≤ p ≤ m
α
p
, then ∫
τ
α = ∫
τ
α
m
, and an analogous result holds when integrating an odd non-homogeneous differential form over an even simplex.
is an even non-homogeneous differential form Σ0 ≤ p ≤ m
α
p
, then ∫
τ
α = ∫
τ
α
m
, and an analogous result holds when integrating an odd non-homogeneous differential form over an even simplex.
(III) Integration over a chain There are two cases to consider:
- i) integration of an odd form over an even chain;
- ii) integration of an even form over an odd chain.
The remarks up to and including part (IV) discuss the first case (i). The second case (ii) is similar and is left to the reader.
Let {τ i : i ∈ I} be a set of even m-simplexes in the metrizable, pure, m-dimensional manifold B. The free group with this set as a basis is the set S m (B) of linear combinations with integer coefficients
where all but finitely many of the k
i
are zero ([P1], section 3.3.8(VI)). It is useful to consider the real vector space
 formed by allowing these sums to have real coefficients; any such sum is called a chain of simplexes (ibid.).
formed by allowing these sums to have real coefficients; any such sum is called a chain of simplexes (ibid.).
Example 4.60
A closed, convex polyhedron
10
in
is a finite intersection of closed half-spaces. Any closed polyhedron is a finite union of convex closed polyhedra (
[BOU 82a]
, 11.3.1). A closed polyhedron is a chain of simplexes (see [P1], section 3.3.8(VI) for a demonstration of how to express a square as the sum of two simplexes), so a chain of closed polyhedra is a chain of simplexes.
In the following, every chain is a chain of simplexes. If
, set
This definition still makes sense in the obvious way if the chain τ = ∑
i ∈ I
k
i
τ
i
. is allowed to be infinite (i.e. the sum is allowed to include infinitely many non-zero terms) and the set supp
 is compact.
is compact.
(IV) Change of variable
Let B′ be another metrizable pure m-dimensional manifold, suppose that f : B → B′ is a morphism, and let
 be an orientation of f .If
be an orientation of f .If
 is an even simplex in B, then
is an even simplex in B, then
 is an even simplex in B′. From [4.38], we can deduce the definition of f (τ) when τ is an even chain in B. By [4.36],
is an even simplex in B′. From [4.38], we can deduce the definition of f (τ) when τ is an even chain in B. By [4.36],
(V) Boundary of a chain
The i-th face of the standard m-simplex Δ
m
in
is ϵ
i
m
: Δ
m − 1 ↦ Δ
m
, where ([P1], section 3.3.8(VI))

Given an m-simplex
, its boundary ∂ τ is defined as follows for m ≥ 1 :
If
 is the chain defined by [4.37], where the τ
i
are m-simplexes, write:
is the chain defined by [4.37], where the τ
i
are m-simplexes, write:
The boundary ∂(τ) is a chain with the same parity as the chain τ. If these chains are odd (which will be assumed henceforth), the orientation of ∂ (τ) above is said to be induced by the orientation of τ. Consider, for example, the triangle Δ2 in the plane, equipped with its canonical orientation, and write v
0, v
1, v
2 for its vertices; then ([P1], section 3.3.8(V))
 : see Figure 4.2
: see Figure 4.2
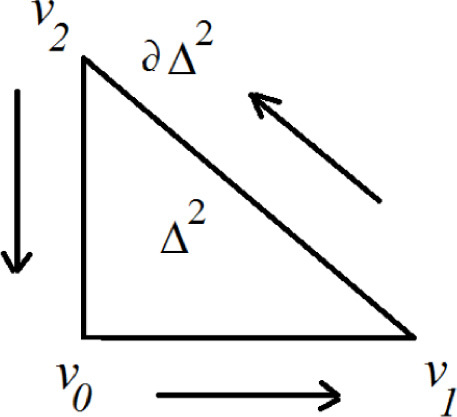
.
Proof
We have:
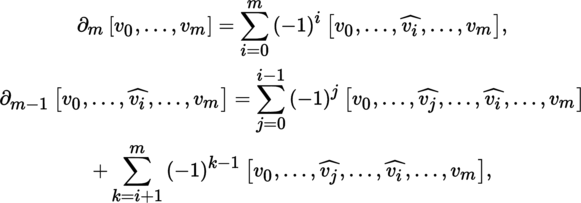
and ∂ m − 1 ∘ ∂ m [v 0, …, v m ] = 0.
(VI) Orientation of a boundary Our next task is to specify the notion of the boundary of an odd chain, as well as the orientation of this boundary. This is straightforward if we proceed as described in Remark 4.61. Let τ be an odd chain in an m-dimensional manifold B (m ≥ 2) and write Fr (τ) for its frontier. The latter is the union of a submanifold ∂ τ of dimension m – 1, called the regular boundary (or simply the boundary) of τ (in the example from Remark 4.61, this is the union of the open segments ]v i , v j [), and a set of points contained in a submanifold of dimension m – 2 (the endpoints of the segments, in the example).
Let b ∈ ∂ τ and suppose that ξ is an orientation of T
b
(∂ τ). Write
 for the orientation of T
b
(B) containing each of the vectors v ∧ u, where v is a vector pointing strictly outward from τ at b and u is a non-zero element of
for the orientation of T
b
(B) containing each of the vectors v ∧ u, where v is a vector pointing strictly outward from τ at b and u is a non-zero element of
 that belongs to the orientation ξ. The mapping
that belongs to the orientation ξ. The mapping
 is a bijection from Or (T
x
(∂ τ) onto Or (B) and the
is a bijection from Or (T
x
(∂ τ) onto Or (B) and the
 determine a morphism
determine a morphism
 that is an orientation of the canonical injection i : ∂ τ ↪ B (section 4.4.5(IV)).
that is an orientation of the canonical injection i : ∂ τ ↪ B (section 4.4.5(IV)).
Definition 4.63
If O is an orientation of B, the orientation of ∂ τ associated with O by
 (
Corollary-Definition 4.47
) is said to be induced by O.
(
Corollary-Definition 4.47
) is said to be induced by O.
4.5 Pseudo-Riemannian manifolds
4.5.1 Metric
Let B be a Banach manifold of class C r (r ≥ ∞) and g :(X, Y) ↦ g (X, Y) = 〈X | Y〉 a twice covariant Hermitian tensor field of class C r . For every b ∈ B,

Consider the condition (M) and the weaker condition (WM) stated below:

is an anti-linear bijection from T b (B) onto T b ∨ (B) ([P2], section 3.10.1(I)).

is non-degenerate (i.e. if g (Y b , X b ) b = 0 for all X b ∈ T b (B), then Y b = 0).
If B is locally finite-dimensional (which is typically the case in practice), the conditions (M) and (WM) are equivalent.
Suppose now that
and let B be a pure m-dimensional manifold.
Definition 4.65
A frame (h α)1 ≤ α ≤ m of T (B) (Definition 3.23) is said to be orthonormal for the metric g if

for every b ∈ B, where η b , (α, β) ∈ {1, –1}. We say that g (b) has signature (p b , m – p b ) if, for every β ∈ {1,…, m}, Card {α ∈ {1, …, m} : sgn (η b (α, β)) = 1} = p b .
If B is connected, the signature of g is constant. Let (U, ξ, m) be a chart; we can express g locally (over U) by

where the square matrix G (b) = (g
ij
(b)) is real, symmetric, and nowhere singular. Any such chart is said to be a system of normal pseudo-Riemannian coordinates at the point b ∈ B if the system of tangent vectors
 is orthonormal for the real symmetric form 〈.|.〉
b
.
is orthonormal for the real symmetric form 〈.|.〉
b
.
The real manifold B is Riemannian if the symmetric form g (b) has signature (m, 0) at every point; if m ≥ 2 and the signature is (1, m – 1) or (m – 1, 1) at every point, then the manifold B is said to be Lorentzian (the Lorentzian manifold of dimension 4 is encountered in general relativity; we will call it the Einstein manifold).
4.5.2 Pseudo-Riemannian volume element
Let {σ α :1 ≤ α ≤ m} be the dual coframe of the orthonormal frame (h α )1 ≤ α ≤ m (Lemma-Definition 3.38). The pseudo-Riemannian volume element for which the frame (h α )1 ≤ α ≤ m is positively oriented is (Definition 4.37 and section 4.4.5(III)):

Let (h β′) be another, arbitrary frame. Let (σ β′) be its dual, and suppose that A = (A α ′ α ) is the inverse change-of-basis matrix satisfying h α ′ = ∑ α h α ′ A α ′ α (see [1.2], section 1.2.1( II )). Then, by [4.40], using the fact that g is bilinear,

where g α ′ β ′ = g(h α , h β ′ ). Writing (g α ′ β ′ ) for the matrix with entries g α ′ β ′ ,we therefore have det(g α ′ β ′ ) = det (A)2 η, which implies that

where ε =+1if the frame (h β′) is positively oriented and ε = – 1 otherwise. Moreover, σ α = ∑ α ′ A α ′ α σ α ′ , so

(see [P1], section 2.3.11(V)) and hence
