4 Eindeutigkeit von Maßen
Ehe wir die Fortsetzbarkeit von  und anderen Maßen diskutieren, untersuchen wir, ob es prinzipiell ausreicht, Maße auf einem Erzeuger
und anderen Maßen diskutieren, untersuchen wir, ob es prinzipiell ausreicht, Maße auf einem Erzeuger  einer σ-Algebra vorzugeben –z. B.
einer σ-Algebra vorzugeben –z. B.  auf
auf  . Dabei stoßen wir auf ein grundlegendes Problem: man kann selten
. Dabei stoßen wir auf ein grundlegendes Problem: man kann selten  konstruktiv zu
konstruktiv zu  erweitern. Einen Ausweg bietet das folgende Hilfsmittel.
erweitern. Einen Ausweg bietet das folgende Hilfsmittel.
4.1 Definition. Eine Familie  heißt Dynkin-System, wenn gilt
heißt Dynkin-System, wenn gilt

(D1)

(D2)

(D3)
Vergleicht man (D1)-(D3) mit (∑1)—(∑3), dann folgt sofort, dass jede σ-Algebra auch ein Dynkin-System ist. Wie in § 2.2.a), b) sieht man, dass
 und
und  .
.
4.2 Satz. a) Für jede Familie  existiert ein minimales Dynkin-System
existiert ein minimales Dynkin-System  mit
mit  .
.  heißt das von
heißt das von  erzeugte Dynkin-System. Bezeichnung:
erzeugte Dynkin-System. Bezeichnung:  .
.
b) Stets gilt  .
.
Beweis. Teil a) ist analog zu Satz 2.4. Zu b): Da die σ-Algebra  ein Dynkin-System ist, für das
ein Dynkin-System ist, für das  gilt, folgt wegen der Minimalität von
gilt, folgt wegen der Minimalität von  , dass
, dass 
Das folgende Lemma erklärt den Zusammenhang zwischen Dynkin-Systemen und  Algebren.
Algebren.
4.3 Lemma. Es sei  ein Dynkin-System.
ein Dynkin-System.
 ist eine
ist eine  ist ∩-stabil (d. h.
ist ∩-stabil (d. h.  .
.
Beweis. „⇒“: Ist  eine
eine  dann (∑1)—(∑3) ⇒ (D1)—(D3), und die ∩-Stabilität folgt aus § 2.2.c).
dann (∑1)—(∑3) ⇒ (D1)—(D3), und die ∩-Stabilität folgt aus § 2.2.c).
„⇐“: Wir müssen (∑3) zeigen:  . Setze E1:=D1 und
. Setze E1:=D1 und

Mithin folgt  .
.
Erzeuger sind i. Allg. kleiner und handlicher als die davon erzeugte σ-Algebra. Daher ist der folgende Satz von großer Bedeutung.
4.4 Satz.  ∩-stabil
∩-stabil  .
.
Beweis. 1°) Offensichtlich gilt 
2°) Wäre  eine σ-Algebra dann hätten wir
eine σ-Algebra dann hätten wir  , da ja
, da ja  die kleinste σ-Algebra ist, für die
die kleinste σ-Algebra ist, für die  gilt; wegen 1° ist
gilt; wegen 1° ist  . Im Hinblick auf Lemma 4.3 reicht es also zu zeigen, dass
. Im Hinblick auf Lemma 4.3 reicht es also zu zeigen, dass  ∩-stabil ist.
∩-stabil ist.
3°) Wir zeigen:  ist ein Dynkin-System für jedes
ist ein Dynkin-System für jedes 
(D1) Klar.
(D2) Für  gilt auch
gilt auch  . Das folgt so:
. Das folgt so:

(D3) 
Somit ist  .
.
4°) Offensichtlich ist  ; da
; da  ∩-stabil ist, gilt
∩-stabil ist, gilt
Nun besagt  für alle
für alle  gerade, dass
gerade, dass  ∩-stabil ist.
∩-stabil ist.

Einige Autoren verwenden monotone Klassen. Das sind Familien  mit
mit

(MC1)

(MC2)
Für monotone Klassen gilt folgende Aussage, die Satz 4.4 entspricht:
Satz von der monotonen Klasse. Es sei  eine Familien von Mengen, die stabil unter Schnitten und Komplementbildung ist
eine Familien von Mengen, die stabil unter Schnitten und Komplementbildung ist  . Dann gilt für jede monotone Klasse, dass aus
. Dann gilt für jede monotone Klasse, dass aus  sofort
sofort  folgt.
folgt.  Aufgabe 4.5)
Aufgabe 4.5)
Die Aussage und Beweistechnik von Satz 4.4 spielen in der Wahrscheinlichkeitstheorie eine wichtige Rolle. Wir verwenden Dynkin-Systeme zunächst nur im folgenden Satz.
4.5 Satz (Eindeutigkeitssatz). Es seien  ein beliebiger Messraum,
ein beliebiger Messraum,  zwei Maße und
zwei Maße und  mit folgenden Eigenschaften:
mit folgenden Eigenschaften:
a)  ist ∩-stabil,
ist ∩-stabil,
b) 
Dann  .
.
4.6 Bemerkung. a) Die Aussage von Satz 4.5 wird oft auch so geschrieben:  . (Dabei ist
. (Dabei ist  die Einschränkung von µ auf die Familie
die Einschränkung von µ auf die Familie  .)
.)
b) Sind µ und v W-Maße, dann kann Bedingung b) in Satz 4.5 weggelassen werden. Denn: µ(E) = ν(E) = 1. Füge o. E. E zu  hinzu und wähle Gn = E.
hinzu und wähle Gn = E.
Beweis von Satz 4.5. Setze  , n ∈
, n ∈  .
.
1°) Behauptung:  ist ein Dynkin-System.
ist ein Dynkin-System.
(D1) Klar.
(D2) Sei  dann ist
dann ist  weil gilt
weil gilt
(D3) Seien  paarweise disjunkt. Dann folgt
paarweise disjunkt. Dann folgt  aus
aus
2°) Für alle n gilt

Andererseits:

Also:

Aufgrund der Stetigkeit von Maßen (Satz 3.3.f) folgt nun

Weitere Anwendungen für Dynkin-Systeme
Die folgenden Resultate zeigen, dass das Lebesgue–Maß  – wenn es existiert – ein besonderes Maß ist. Zur Erinnerung
– wenn es existiert – ein besonderes Maß ist. Zur Erinnerung
x + B:= {x + b: b ∈ B} ist die um  verschobene Menge
verschobene Menge  .
.
4.7 Satz. a) Das Lebesgue–Maß λd ist translationsinvariant, d. h.

b) Es sei µ ein translationsinvariantes Maβ auf ( , ℬ(
, ℬ( )) mit K = µ([0, 1)d) < ∞. Dann gilt bereits µ = κ · λd.
)) mit K = µ([0, 1)d) < ∞. Dann gilt bereits µ = κ · λd.
Beweis. Zunächst überlegen wir uns, dass  für alle
für alle  — sonst wäre a) sinnlos. Für festes x ∈
— sonst wäre a) sinnlos. Für festes x ∈  setzen wir
setzen wir

Offenbar ist  eine σ-Algebra
eine σ-Algebra  und
und  . Somit gilt
. Somit gilt

a) Setze ν(B):= λd (x + B) für ein festes x ∈  und B ∈ ℬ(
und B ∈ ℬ( )Dann ist ν ein Maß auf (
)Dann ist ν ein Maß auf ( und
und
Also gilt  , wobei
, wobei  ein ∩-stabiler Erzeuger von ℬ(
ein ∩-stabiler Erzeuger von ℬ( ) ist (vgl. Abb. 4.1), für den außerdem [–m, m)d ∈
) ist (vgl. Abb. 4.1), für den außerdem [–m, m)d ∈  , [–, m)d ↑
, [–, m)d ↑  ,λd([-m,m)d) = (2m)d < ∞ erfüllt ist. Somit können wir Satz 4.5 anwenden und sehen, dass ν = λd gilt.
,λd([-m,m)d) = (2m)d < ∞ erfüllt ist. Somit können wir Satz 4.5 anwenden und sehen, dass ν = λd gilt.
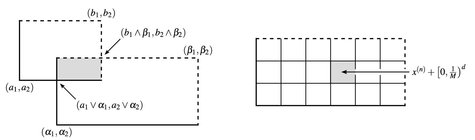
Abb. 4.1. Links: Es gilt  . Rechts: Wir parkettieren I mit Rechtecken
. Rechts: Wir parkettieren I mit Rechtecken  der Seitenlänge 1/M und mit linker unterer Ecke x(n). (M ist z. B. das kgV aller Nenner der an, bn ...).
der Seitenlänge 1/M und mit linker unterer Ecke x(n). (M ist z. B. das kgV aller Nenner der an, bn ...).
b) Es sei I ∈  . Dann existieren M, k(I) ∈ N und x(n) ∈
. Dann existieren M, k(I) ∈ N und x(n) ∈  mit
mit
(vgl. Abb. 4.1). Da λd und µ translationsinvariante Maße sind, gilt

Aus der ersten Zeile erhalten wir  und aus der zweiten Zeile ergibt sich
und aus der zweiten Zeile ergibt sich  Zusammen haben wir µ(I) = κ·λd(I) für alle Rechtecke
Zusammen haben wir µ(I) = κ·λd(I) für alle Rechtecke  . Aus dem Eindeutigkeitssatz 4.5 folgt dann µ = κ · λd.
. Aus dem Eindeutigkeitssatz 4.5 folgt dann µ = κ · λd.
Unser nächstes Etappenziel ist der Existenzbeweis für das Lebesgue–Maß (und viele andere Maße!).
Aufgaben
- Es sei λd das d-dimensionale Lebesgue-Maß auf (
 , ℬ(
, ℬ( )).
)).
- (a) Zeigen Sie:
 , λd(Nj) = 0 ∀j ∈
, λd(Nj) = 0 ∀j ∈  ⇒
⇒ 
- (b) Für alle r ∈
 gilt {r} ∈ ℬ(
gilt {r} ∈ ℬ( ) und λ1 {r} = 0. (Hinweis: Stetigkeit von oben.)
) und λ1 {r} = 0. (Hinweis: Stetigkeit von oben.) - (c) Es sei E eine Ebene in
 . Dann gilt E ∈ ℬ(
. Dann gilt E ∈ ℬ( )und λ3(E) = 0. (Hinweis: Satz 3.7 und 4.7.)
)und λ3(E) = 0. (Hinweis: Satz 3.7 und 4.7.) - (d) Es sei N eine λd-Nullmenge und M ⊂ N. Ist M eine λd-Nullmenge?
- (e) Gegeben sei der Maßraum (
 , ℬ(
, ℬ( ), δa + δb) mit a, b ∈
), δa + δb) mit a, b ∈  . Finde alle δa + δb-Nullmengen.
. Finde alle δa + δb-Nullmengen.
- (a) Zeigen Sie:
- Es sei k ∈
 und E = {1, 2,… , 2k – 1, 2k}. Ist F = {A ⊂ E: #A ist gerade} ein Dynkin-System bzw. eine σ-Algebra?
und E = {1, 2,… , 2k – 1, 2k}. Ist F = {A ⊂ E: #A ist gerade} ein Dynkin-System bzw. eine σ-Algebra? - Bestimmen Sie die Familien (
 ) und
) und  auf dem Grundraum E = (0,1) für
auf dem Grundraum E = (0,1) für

Hinweis: Beachten Sie die Struktur von σ({A1, ..., An}) für eine Partition A1, ...,An von E (vgl. Aufgabe 2.6), sowie
 und Satz 4.4.
und Satz 4.4. - (Alternative Charakterisierungvon Dynkin-Systemen) Eine Familie
 (E) ist genau dann ein Dynkin-System, wenn
(E) ist genau dann ein Dynkin-System, wenn

(D1)




- (Satz von der monotonen Klasse) Es sei ℳ ⊂
 eine monotone Klasse (MC), vgl. Seite 15, und ℱ ⊂
eine monotone Klasse (MC), vgl. Seite 15, und ℱ ⊂  eine Familie von Mengen.
eine Familie von Mengen.
- (a) Es gibt eine minimale MC µ(ℱ) mit ℱ ⊂ µ(ℱ).
- (b) Es sei ℱ
 -stabil, d. h. F ∈ ℱ ⇒ Fc ∈ ℱ. Dann ist auch µ(ℱ)
-stabil, d. h. F ∈ ℱ ⇒ Fc ∈ ℱ. Dann ist auch µ(ℱ)  -stabil.
-stabil. - (c) Es sei ℱ ∩-stabil, d. h. F, G ∈ ℱ ⇒ F ∩ G ∈ ℱ. Dann ist auch µ(ℱ) ∩-stabil.
Hinweis: Betrachten Sie nacheinander die Systeme

und zeigen Sie, dass dies auch monotone Klassen mit ℱ ⊂ Σ, Σ′ sind.
- (d) Beweisen Sie nun mit Hilfe der vorangehenden Teilaufgaben den folgenden
Satz (monotone Klassen). Es sei ℱ ⊂
 eine Familie, die C-stabil und ∩-stabil ist und E ∈ ℱ. Dann gilt für jede monotone Klasse ℳ ⊃ ℱ auch ℳ ⊃ σ(ℱ).
eine Familie, die C-stabil und ∩-stabil ist und E ∈ ℱ. Dann gilt für jede monotone Klasse ℳ ⊃ ℱ auch ℳ ⊃ σ(ℱ).
- (Approximation von σ-Algebren) Es sei
 eine Boolesche Algebra auf E, d. h. E ∈
eine Boolesche Algebra auf E, d. h. E ∈  und
und  ist stabil unter endlichen Schnitten, Vereinigungen und Komplementen. Weiter seien
ist stabil unter endlichen Schnitten, Vereinigungen und Komplementen. Weiter seien  und µ ein endliches Maß auf (E,
und µ ein endliches Maß auf (E,  ). Wir schreiben
). Wir schreiben  für die symmetrische Differenz von zwei Mengen A, B ⊂ E. Zeigen Sie:
für die symmetrische Differenz von zwei Mengen A, B ⊂ E. Zeigen Sie:
- (a) Für jedes ∈ > 0 und A ∈
 gibt es ein G ∈
gibt es ein G ∈  mit µ(A∆G) ≤ ∈. Hinweis: Die Familie {A ∈
mit µ(A∆G) ≤ ∈. Hinweis: Die Familie {A ∈  : Ve > 0 ∃G ∈
: Ve > 0 ∃G ∈  : µ (A ∆ G) ≤ ∈} ist ein Dynkin-System.
: µ (A ∆ G) ≤ ∈} ist ein Dynkin-System. - (b) Es seien µ, ν endliche Maße auf (E,
 ). Für jedes ∈ > 0 und A ∈
). Für jedes ∈ > 0 und A ∈  gibt es ein G ∈
gibt es ein G ∈  mit µ(A ∆ G) ≤ ∈ und ν (A ∆ G) ≤ ∈.
mit µ(A ∆ G) ≤ ∈ und ν (A ∆ G) ≤ ∈. - (c) Es sei E =
 ,
,  = ℬ(
= ℬ( ) und µ = λd. Für eine Menge A ∈
) und µ = λd. Für eine Menge A ∈  gilt µ(A) = 0 genau dann, wenn es für jedes ∈ > 0 eine Folge von Rechtecken
gilt µ(A) = 0 genau dann, wenn es für jedes ∈ > 0 eine Folge von Rechtecken gilt, so dass A ⊂ UnIn und µ(UnIn) ≤ ∈.
gilt, so dass A ⊂ UnIn und µ(UnIn) ≤ ∈.
- (a) Für jedes ∈ > 0 und A ∈
- Es sei (Ω,
 ,) ein Wahrscheinlichkeitsraum und ℬ,
,) ein Wahrscheinlichkeitsraum und ℬ,  ⊂
⊂  seien σ-Algebren. ℬ und
seien σ-Algebren. ℬ und  heißen (stochastisch) unabhängig, wenn
heißen (stochastisch) unabhängig, wenn

Seien ℬ =
 und
und  = σ(ℋ), wobei
= σ(ℋ), wobei  und ℋ durchschnittsstabile Mengenfamilien sind. Zeigen Sie:
und ℋ durchschnittsstabile Mengenfamilien sind. Zeigen Sie:

Hinweis: Beachten Sie die Struktur des Beweises von Satz 4.5.
- Zeigen Sie, dass Satz 4.5 auch dann gilt, wenn die Folge
 den Raum E überdeckt, d. h. E = Un Gn (aber nicht notwendig gegen E aufsteigt), und µ(Gn) = ν(Gn) < ∞ erfüllt.
den Raum E überdeckt, d. h. E = Un Gn (aber nicht notwendig gegen E aufsteigt), und µ(Gn) = ν(Gn) < ∞ erfüllt.
Hinweis: Die Mengen G1 ∪ · · · ∪ Gn erfüllen die Voraussetzungen von Satz 4.5.
- (Dilatationen) Adaptieren Sie den Beweis von Satz 4.7 und zeigen Sie, dass t · B:= {tb: b ∈ B} für jede Borelmenge B ∈ ℬ.(
 ) und t > 0 wiederum Borelsch ist. Weiter gilt
) und t > 0 wiederum Borelsch ist. Weiter gilt
- (Invariante Maße) Es sei (E,
 , µ) ein endlicher Maßraum und
, µ) ein endlicher Maßraum und  für einen ∩-stabilen Erzeuger
für einen ∩-stabilen Erzeuger  . Weiterhin sei θ: E → E eine Abbildung mit θ-1 (A) ∈
. Weiterhin sei θ: E → E eine Abbildung mit θ-1 (A) ∈  für alle A ∈
für alle A ∈  . Zeigen Sie, dass
. Zeigen Sie, dass
