Sebastian Boblest1, Thomas Müller2 und Günter Wunner3
(1)
Dürnau, Deutschland
(2)
Max-Planck-Institut für Astronomie, Haus der Astronomie, Heidelberg, Deutschland
(3)
Universität Stuttgart, 1. Institut für Theoretische Physik, Stuttgart, Deutschland
In diesem Kapitel überlegen wir uns, welche Konsequenzen das Postulat einer beobachterunabhängigen Lichtgeschwindigkeit hat. Dazu fassen wir als Erstes kurz die wesentlichen Punkte der Newton’schen Mechanik und der Elektrodynamik zusammen.
3.1 Transformation zwischen Bezugssystemen
In der Newton’schen Mechanik ist jeder Raumpunkt durch einen Koordinatenvektor in einem beliebig gewählten Koordinatensystem bestimmt. Jeder Zeitpunkt kann durch die Zeit t relativ zu einem beliebig gewählten Zeitnullpunkt (z. B. der Greenwichzeit) angegeben werden.
Für die Bewegung eines Punktteilchens mit konstanter Masse m gilt nach dem zweiten Newton’schen Axiom
(3.1)
Die Beschleunigung die das Punktteilchen erfährt, hängt also von der äußeren Kraft F und seiner trägen Masse m ab. Aus diesem Differentialgleichungssystem ergibt sich die Bahnkurve r(t) des Teilchens. Nach dem klassischen Verständnis von Raum und Zeit gelten die Gesetze der Newton’schen Mechanik in jedem Inertialsystem (s. Abschn. 2.4).
Ein Wechsel des Inertialsystems in ein relativ dazu mit der Geschwindigkeit v bewegtes System erfolgt durch die allgemeine Galilei-Transformation
(3.2)
Dabei bezeichnet D eine Drehung des Inertialsystems, v die Relativgeschwindigkeit zwischen den Inertialsystemen und r0 und t0 sind Verschiebungen des Raum- und Zeitursprungs.
Die Galilei-Transformation (3.2) beinhaltet insgesamt 10 freie Parameter: drei Drehwinkel in D, drei Geschwindigkeitskomponenten in v, drei Translationskomponenten in r0 und die Zeitverschiebung in t0. Die Menge aller Galilei-Transformationen bildet eine 10-parametrige Gruppe, da je zwei Galilei-Transformationen wieder eine Galilei-Transformation ergeben. Das neutrale Element der Gruppe ist die identische Abbildung mit D = 1, v = 0, r0 = 0 und t0 = 0. Das inverse Element ist gerade die Umkehrtransformation. Wichtig zu bemerken ist, dass die Newton’sche Mechanik unter allen Transformationen dieser Gruppe invariant ist. Setzen wir die Galilei-Transformation in die Bewegungsgleichungen (3.1) ein, so ändert sich deren Form nicht.
Wie verhalten sich nun die Grundgleichungen der Elektrodynamik gegenüber Galilei-Transformationen? Die Maxwell’schen Gl. (1.5)
(3.3)
sind ein Differentialgleichungssystem zur Bestimmung der elektrischen und magnetischen Felder E(r, t) und B(r, t) bei gegebener Verteilung der elektrischen Ladungen ρel(r, t) und Ströme j(r, t). Mögliche Lösungen sind beispielsweise statische Felder, die in der Elektro- und Magnetostatik behandelt werden, oder elektromagnetische Wellen, die sich im Vakuum mit der Lichtgeschwindigkeit ausbreiten, die nach (1.8) mit der elektrischen Feldkonstante ε0 und der magnetischen Feldkonstante μ0 verknüpft ist.
Wie man durch direktes Einsetzen nachrechnen kann, sind die Maxwell’schen Gleichungen nicht invariant unter Galilei-Transformationen. Um dies klar zu machen, betrachten wir die Ausbreitung einer ebenen Welle in x-Richtung.
In einem bewegten System mit r′ = r − vext würde sich die Welle mit der Geschwindigkeit c′ = c − v ≠ c ausbreiten. Diese Welle mit Geschwindigkeit c′ wäre aber keine Lösung der Maxwell’schen Gleichungen.
Wir wissen bereits, wo an dieser Argumentation das Problem ist: Die in Kap. 2 besprochenen Experimente und viele weitere ergeben, dass die Lichtgeschwindigkeit beobachterunabhängig ist, d. h. sie ist in beiden Inertialsystemen gleich. Die Maxwell-Gleichungen gelten demnach in jedem Inertialsystem. Es gibt dann aber nur eine mögliche Konsequenz: Der Wechsel zwischen Inertialsystemen in der Elektrodynamik erfolgt nicht über die Galilei-Transformation! Damit sind wir an einem widersprüchlichen Punkt angelangt. Bewegt sich ein Beobachter z. B. mit halber Schallgeschwindigkeit auf eine Schallquelle zu, was ein Problem der Mechanik ist, so beobachtet er nach der Galilei-Transformation eine Schallgeschwindigkeit vges = 3vS∕2 im Vergleich zu einem ruhenden Beobachter. Da die Lichtgeschwindigkeit konstant sein soll, gilt das Gleiche nicht bei einer Lichtquelle und einem sich darauf mit halber Lichtgeschwindigkeit zubewegenden Beobachter (s. Abb. 3.1). Es ist nicht zufriedenstellend, anzunehmen, dass die Transformationsvorschrift in der Newton’schen Mechanik eine andere sein soll als in der Elektrodynamik.
Abb. 3.1
Bewegt sich ein Beobachter mit halber Schallgeschwindigkeit auf eine Schallquelle zu, so beobachtet er nach der Galilei-Transformation eine Schallgeschwindigkeit vges = 3vS∕2 im Vergleich zu einem ruhenden Beobachter. Da die Lichtgeschwindigkeit konstant sein soll, gilt das Gleiche nicht bei einer Lichtquelle und einem sich darauf mit halber Lichtgeschwindigkeit zu bewegenden Beobachter. Diese Beobachtung bedeutet, dass die Galilei-Transformation nur eine Näherung der korrekten Transformation für kleine Geschwindigkeiten sein kann
Wir können diesen Widerspruch auflösen, wenn wir annehmen, dass die Galilei-Transformation nur eine Näherung der korrekten Transformation ist, unter der sich die Gleichungen der klassischen Elektrodynamik transformieren. Diese heißt Lorentz-Transformation.1 Einsteins Verdienst war es zu erkennen, dass die Lorentz-Transformation nicht auf die Elektrodynamik beschränkt ist, sondern eine allgemeine Eigenschaft von Raum und Zeit darstellt. Die mit der Galilei-Transformation verknüpften, uns vertrauten Eigenschaften von Raum und Zeit, z. B. die Existenz einer absoluten Zeit, gelten in der Relativitätstheorie nicht mehr. Das erkennen wir an diesem einfachen Beispiel der Geschwindigkeitsaddition. Die Lorentz-Transformation muss so gestaltet sein, dass sich Geschwindigkeiten nicht zu einer Gesamtgeschwindigkeit über der Lichtgeschwindigkeit addieren können. Das ist nur möglich, wenn die Längen- oder Zeitmaßstäbe in verschiedenen Inertialsystemen unterschiedlich sein können.
3.2 Motivation der Lorentz-Transformation
Die Invarianz der Maxwell-Gleichungen gegenüber der Lorentz-Transformation war bereits vor Einsteins Arbeit ,,Zur Elektrodynamik bewegter Körper“ [1] bekannt.
Wir wollen im Folgenden eine Motivation zur Herleitung der Lorentz-Transformation geben. Wir gehen aus von einem Spezialfall der Galilei-Transformation vom System S ins System S′ mit D = 1, v = vex, r0 = 0, t0 = 0, also
(3.4)
Wir betrachten einen im Raumzeit-Ursprung (r = 0, t = 0) startenden Lichtstrahl. Dieser bewegt sich mit Lichtgeschwindigkeit und erreicht nach der Zeit t den Ort (x, y, z) mit Da nun die Lichtgeschwindigkeit in allen Systemen gleich groß sein soll, muss auch gelten, wobei (x′, y′, z′) und t′ zusammen den gleichen Punkt in Raum und Zeit, jedoch in anderen Koordinaten, beschreiben. Quadrieren und Umsortieren führt auf die beiden Beziehungen
(3.5)
wobei die erste Gleichung unsere Voraussetzung darstellt und die zweite Gleichung die Forderung an die Transformation angibt. Setzen wir die Galilei-Transformation (3.4) in die rechte Gleichung von (3.5) ein, so gelangen wir zu
(3.6)
Die Galilei-Transformation erfüllt also nicht die Konstanz der Lichtgeschwindigkeit. Um den Restterm −2xvt + v2t2 durch eine Transformation der Zeit auch noch zu eliminieren, werden wir zwei Ansätze ausprobieren.
Als ersten Ansatz lassen wir für die Zeit eine einfache Verschiebung zu, d. h. statt (3.4) haben wir
Dabei wurde in der letzten Zeile α = xv∕c2 gesetzt. Nun treten aber Faktoren auf, die wir auch noch loswerden müssen. Durch die Wahl für α haben wir aber erreicht, dass vor x2 und c2t2 der gleiche Faktor steht. Das hilft uns, einen verbesserten Ansatz zu finden.
Dieser zweite Ansatz lautet
(3.9)
der uns dann auch zum gewünschten Ergebnis führt,
(3.10)
Unter Lorentz-Transformationen ist damit die Größe
(3.11)
invariant, d. h. es gilt s2 = s′2. Die Wahl des Vorzeichens von s2 ist rein willkürlich und kann auch anders gewählt werden. Wir folgen der Vorzeichenkonvention von Misner, Thorne und Wheeler [3].
Stünden in (3.11) nur positive Vorzeichen, so würde
(3.12)
gelten, d. h. die Lorentz-Transformation würde als Drehmatrix die Norm des Vektors erhalten, wie in der euklidischen Geometrie.2 Tatsächlich können wir Lorentz-Transformationen in einem erweiterten Sinn als Drehungen betrachten, allerdings mit einem imaginären Winkel (s. Abschn. 5.1.2).
Wir haben in (3.9) die spezielle Lorentz-Transformation für Geschwindigkeiten v = vex in x-Richtung eingeführt. Speziell soll hier bedeuten, dass die Transformation in ein parallel zu einer Koordinatenachse bewegtes System, das nicht relativ zum ruhenden System gedreht ist, erfolgt.
Warum fallen uns im täglichen Leben die Effekte der Lorentz-Transformation nicht auf? Wenn wir sehr großzügig sind, können wir als maximale Geschwindigkeit, mit der wir im Alltag konfrontiert sind, die zweite kosmische Geschwindigkeit v ≈ 11 km s−1 verwenden, die eine Rakete erreichen muss, die das Schwerefeld der Erde verlassen soll (s. Tab. 1.1). Selbst für diese im alltäglichen Sinn sehr hohe Geschwindigkeit ist immer noch v∕c ≈ 4 · 10−5 und damit ! Die Geschwindigkeiten, mit denen wir uns im Alltag bewegen, sind also viel zu gering, als dass der Unterschied zwischen Lorentz- und Galilei-Transformation zu erkennen wäre.
Andererseits sehen wir aber auch, dass für v → c
(3.13)
geht. Es existiert also keine Lorentz-Transformation in ein sich mit Lichtgeschwindigkeit bewegendes Inertialsystem. Das bedeutet letztlich, dass ein Photon, das sich ja mit Lichtgeschwindigkeit bewegt, kein Ruhsystem hat, Licht bewegt sich in jedem System exakt mit Lichtgeschwindigkeit.
Die Invarianz der Maxwell-Gleichungen wird aus der Notation von (3.3) noch nicht deutlich. Die Gleichungen lassen sich aber auf eine mathematisch sehr elegante Form bringen, bei der die Lorentz-Invarianz klar zu erkennen ist, wie wir in Kap. 7 sehen.
3.3 Matrixdarstellung
In der SRT haben wir mit der Lichtgeschwindigkeit c eine wichtige Referenzgeschwindigkeit, keine Geschwindigkeit darf höher sein. Aus diesem Grund ist es zweckmäßig, Geschwindigkeiten direkt in Einheiten der Lichtgeschwindigkeit zu messen. Wir führen dazu den Parameter
(3.14)
ein. Die Darstellung der Lorentz-Transformation (3.9) wird noch kompakter, wenn wir für den Wurzelausdruck ebenfalls ein eigenes Symbol einführen. Wir schreiben
(3.15)
Dieser Ausdruck wird auch Lorentz-Faktor genannt. Für β → 1 geht γ → ∞ (s. Abb. 3.2). Des Weiteren ist es jetzt nicht mehr sinnvoll, die Ortskoordinaten und die Zeit getrennt voneinander zu notieren, da die Lorentz-Transformation diese Koordinaten miteinander verknüpft. Deshalb fassen wir von nun an Ort und Zeit zur 4-dimensionalen Raumzeit zusammen und schreiben für die Koordinaten
Abb. 3.2
Der γ-Faktor ist für Geschwindigkeiten β ≪ 1 nahezu 1, divergiert aber für β → 1
(3.16)
Dabei bezeichnet man xμ als Vierervektor und es gilt μ ∈ {0, 1, 2, 3}. Die Zeitkoordinate hat also den Index 0. Um gleiche Einheiten zu erreichen, haben wir die Zeit außerdem mit der Lichtgeschwindigkeit durchmultipliziert. Griechische Indizes bezeichnen ab jetzt immer Vierervektoren, bzw. Komponenten von Vierervektoren je nach Kontext. Möchte man sich nur auf die Raumkoordinaten eines Vierervektors beziehen, so werden lateinische Buchstaben verwendet, d. h. xi mit i ∈ {1, 2, 3}. Details darüber, weshalb wir den Index μ oben schreiben und warum die Menge aller Punkte aus und nicht einfach aus ist, besprechen wir in Kap. 5.
Die spezielle Lorentz-Transformation (3.9) lautet in dieser Schreibweise dann
(3.17)
Da die Lorentz-Transformation eine lineare Transformation in den Raumzeit-Koordinaten ist, können wir (3.17) übersichtlich in der Form einer Matrix-Vektor-Multiplikation schreiben,
(3.18)
bzw. in Kurzschreibung
(3.19)
Dabei verwenden wir für Lorentz-Transformationen generell den großen griechischen Buchstaben Λ (Lambda). Der Vierervektor hat die Komponenten xμ aus (3.16).
3.3.1 Spezielle Lorentz-Transformationen
Gl. (3.9) ist natürlich nicht die einzige Lorentz-Transformation. Sie verknüpft zwei Inertialsysteme, von denen das eine sich mit einer Geschwindigkeit β in x-Richtung relativ zum anderen bewegt. Solche reinen Transformationen in ein System, das sich mit einer bestimmten Geschwindigkeit gegen das momentane Inertialsystem bewegt, werden Lorentz-Boost genannt. Wichtige Spezialfälle der Lorentz-Transformation sind die Boosts Λx, Λy und Λz in x-, y- und z-Richtung, sowie reine Drehungen
(3.20)
mit einer Drehmatrix Di, für die gilt. Die Standard-(3 × 3)-Drehmatrizen um die x-, y- bzw. z-Achse lauten
(3.21)
Die Determinanten der einzelnen Boosts sowie der reinen Drehungen sind alle Eins. Die Inversen ergeben sich durch Vertauschen des Vorzeichens der Geschwindigkeit, β ↦ −β, bzw. des Winkels α ↦ −α.
3.3.2 Vergleich mit der Galilei-Transformation
In der Form (3.2) erkennt man die Ähnlichkeit zwischen Galilei-Transformationen und Lorentz-Transformationen nur schlecht. Wir können aber auch die Galilei-Transformationen ohne Verschiebung des Koordinatenursprungs in einer reinen Matrixform schreiben. Dem Boost in x-Richtung in (3.20) entspricht die Galilei-Transformation
(3.22)
Tatsächlich ist βγ ≈ β für β ≪ 1. Der ,,Boost“ in der Galilei-Transformation ist aber keine symmetrische Matrix, weil die Kopplung der Zeit an die Raumkomponenten vernachlässigt wird. In diesem Sinn ergibt sich die Galilei-Transformation also nicht streng als mathematischer Grenzfall der Lorentz-Transformation.
3.3.3 Rapidität
Wir können eine Lorentz-Transformation auch mit Hilfe der Rapidität θ ausdrücken, die definiert ist über die Beziehung
(3.23)
(s. Abb. 3.3). Der Sinn hinter dieser Definition wird deutlich, wenn wir berücksichtigen, dass aus (3.23) die Zusammenhänge
Abb. 3.3
Die Rapidität θ ∈ (−∞, ∞) ist im Gegensatz zur Geschwindigkeit β ∈ (−1, 1) eine unbeschränkte Funktion
(3.24)
folgen. Damit können wir z. B. den Lorentz-Boost Λx in der Form
(3.25)
schreiben. Zum Vergleich: Die elementare Drehmatrix einer Drehung um die z-Achse im dreidimensionalen euklidischen Raum ist durch (3.21) gegeben, wobei die Drehrichtung im mathematisch positiven Sinn gewählt wurde. Die inverse Drehmatrix folgt direkt aus der Rückdrehung um den selben Winkel, . Man erkennt die große Ähnlichkeit der Drehmatrix zum Boost (3.25). Wenn man außerdem noch die Verwandschaft der trigonometrischen Funktionen ,,“ und ,,“ und der hyperbolischen Funktionen ,,“ und ,,“ berücksichtigt, es gilt ja z. B. , wird diese Ähnlichkeit noch größer. Die Lorentz-Boosts sind also Drehungen um hyperbolische Winkel im Minkowski-Raum.
3.3.4 Hintereinanderschaltung von Lorentz-Transformationen
Natürlich lassen sich auch mehrere Lorentz-Transformationen hintereinander ausführen. Als Beispiel betrachten wir die Herleitung eines Lorentz-Boosts in ein System S′, das sich mit der beliebigen Geschwindigkeit v = (vx, vy, vz)T bzw. β = (βx, βy, βz)T relativ zum System S bewegt. Die Achsen beider Systeme sollen dabei aber parallel bleiben. Die Idee hinter der Berechnung ist, das System S so zu drehen, dass die gedrehte x-Achse in Richtung der Geschwindigkeit β zeigt, dann einen Boost in x-Richtung auszuführen und anschließend zurückzudrehen. Man startet mit einer Rotation um die z-Achse mit Winkel φ1, gefolgt von einer Rotation um die daraus resultierende y-Achse mit Winkel φ2 (s. Abb. 3.4). Mit der Definition
Abb. 3.4
Definition der Geschwindigkeitskomponenten βx, βy und βz und ihr Zusammenhang mit den Drehwinkeln φ1 und φ2
(3.26)
ergeben sich die Beziehungen
(3.27a)
und
(3.27b)
zwischen den Drehwinkeln und den Geschwindigkeitskomponenten. Dann erhalten wir direkt die Drehmatrizen
(3.28)
Man beachte hier, dass die mathematisch positive Drehrichtung Dz umgekehrt werden muss, weil der Geschwindigkeitsvektor β auf die x-Achse zurück gedreht werden soll.
Der allgemeine Lorentz-Boost ist dann gegeben über
(3.29)
mit der resultierenden Gesamtdrehung
(3.30)
Am Ende finden wir die explizite Form
(3.31)
für diese Lorentz-Transformation. Die zum allgemeinen Lorentz-Boost (3.31) gehörende Matrix ist symmetrisch, jeder Boost ist dementsprechend durch eine symmetrische Matrix repräsentiert. Allerdings gilt das nicht für jede Lorentz-Transformation, da Rotationen keinen symmetrischen Matrizen entsprechen.
3.4 Additionstheorem der Geschwindigkeit
Gegeben seien drei Koordinatensysteme S, S′ und S″. S′ bewege sich relativ zu S mit Geschwindigkeit β1 parallel zur x-Achse, und S″ bewege sich relativ zu S′ mit Geschwindigkeit β2 parallel zur x′-Achse. Die Frage, der wir nun nachgehen wollen ist, mit welcher Geschwindigkeit sich S″ relativ zu S bewegt.
Laut Galilei-Transformation müssten wir die Geschwindigkeiten einfach addieren, also β3 = β1 + β2. In der SRT müssen wir jedoch die Lorentz-Transformationen berücksichtigen, wobei Λ3 = Λ2 · Λ1 gilt. Mit der Form des Boosts in x-Richtung aus (3.20) folgt dann für die relevanten (ct-x)-Komponenten
(3.32)
Da Λ3 eine symmetrische Matrix ist, liegt die Vermutung nahe, dass hiesige Hintereinanderausführung zweier Boosts wieder einen Boost ergibt. Aus (3.32) ergeben sich dann die Bestimmungsgleichungen
(3.33a)
(3.33b)
Gl. (3.33a) ergibt mit der Definition von γ in (3.15)
(3.34)
Wir formen die rechte Seite entsprechend der linken Seite um über
(3.35)
also
(3.36)
Die Relativgeschwindigkeit von S″ zu S ist demnach
(3.37)
Wir können durch Einsetzen in (3.33b) leicht überprüfen, dass der gefundene Wert β3 auch diese Gleichung erfüllt. Gl. (3.37) nennt man das Additionstheorem der Geschwindigkeit in der SRT im Fall von parallelen Geschwindigkeiten.
Setzen wir z. B. v1 < c und v2 = c, so ergibt sich
(3.38)
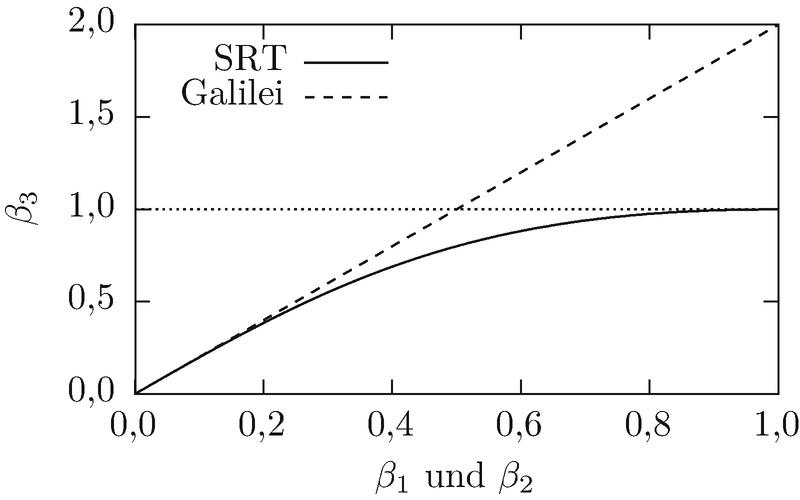
Die Geschwindigkeit v3 kann also wie gefordert maximal gleich der Lichtgeschwindigkeit werden. Abb. 3.5 zeigt das Ergebnis der Addition zweier gleich großer Geschwindigkeiten β1 und β2 nach der Galilei-Transformation und anhand der Lorentz-Transformation. Für kleine Geschwindigkeiten liefern beide Transformationen natürlich das gleiche Ergebnis.
Abb. 3.5
Addition zweier gleich großer Geschwindigkeiten β1 und β2 in der SRT und nach der Galilei-Transformation
3.4.1 Geschwindigkeitsaddition und Rapidität
In (3.23) haben wir die Rapidität eingeführt, mit der sich die Lorentz-Boosts analog zu Drehmatrizen mit dem hyperbolischen Winkel θ formulieren lassen. Für zwei hintereinander ausgeführte Drehungen, z. B. um die z-Achse, mit den Drehwinkeln φ1 und φ2 gilt
(3.39)
d. h. die Drehwinkel addieren sich einfach. Analog gilt für die Rapidität
(3.40)
wie in Übung 3.6.1 gezeigt werden soll. Die Rapiditäten zweier paralleler Boosts addieren sich also ebenfalls einfach, was die Analogie zu Rotationen noch deutlicher macht.
3.4.2 Addition nicht paralleler Geschwindigkeiten
Bei der Addition nicht paralleler Geschwindigkeiten müssen wir bei der Galilei-Transformation die entsprechende Rechnung einfach vektoriell ausführen, also v3 = v1 + v2.
Wir untersuchen jetzt diesen Fall bei der Lorentz-Transformation. Wir beschränken uns auf den Sonderfall der Kombination eines Boosts in x-Richtung mit einem anschließenden Boost in y-Richtung und folgen eng der Diskussion von Ferraro und Thibeault [2].
Die Lorentz-Matrizen Λx und Λy für die beiden Boosts lauten
(3.41)
wobei und . Die Hintereinanderausführung dieser beiden Boosts ergibt
(3.42)
Diese Matrix ist nicht symmetrisch und kann daher nicht als reiner Boost geschrieben werden, da jeder Boost nach (3.31) durch eine symmetrische Matrix dargestellt werden kann. Wenn wir jedoch eine zusätzliche Rotation einfügen, gelangen wir wieder zu einer Boost-Transformation. Um den zugehörigen Rotationswinkel 𝜗 zu finden, machen wir folgenden Ansatz
(3.43)
mit der Drehung
(3.44)
Wir müssen dann in dieser allgemeinen Matrix den Winkel 𝜗 so bestimmen, dass ΛBoost symmetrisch wird und damit ein Boost ist. Die Rechnung ergibt.
(3.45)
Die Bedingung, dass diese Matrix symmetrisch ist, führt auf drei Gleichungen:
(3.46a)
aus dem Vergleich der 01- und der 10-Komponente,
(3.46b)
aus dem Vergleich der 02- und 20-Komponente und
(3.46c)
aus dem Vergleich der 12- und 21-Komponente. Gleichsetzen von (3.46a) und (3.46b) führt auf
(3.47)
Im zweiten Schritt wurde dabei mit γx erweitert und der Zusammenhang β2γ2 = γ2 − 1, sowie die dritte binomische Formel verwendet. Mit für 𝜗 ∈ [0, π∕2] erhält man dann noch
(3.48)
Mit kann man zeigen, dass (3.46c) auf die gleiche Relation führt.
Einsetzen von (3.47) und (3.48) in (3.45) führt schließlich auf
(3.49)
Diese Matrix ist wie gefordert symmetrisch und stellt daher einen Boost dar. Durch Vergleich mit dem Ausdruck für den allgemeinen Boost in (3.31) können wir die Richtung und den Betrag der zugehörigen Geschwindigkeit leicht finden, denn wir erhalten die Relationen
(3.50)
wobei βz = 0 offensichtlich ist. Die Boostgeschwindigkeit ergibt sich aus Vergleich der 00-Komponenten, d. h.
(3.51)
Aus den beiden verbleibenden Gleichungen ergibt sich
(3.52)
Der Faktor 1∕γx in der y-Komponente der Geschwindigkeit unterscheidet das Ergebnis vom nichtrelativistischen Fall.
Um uns diese Ergebnisse noch etwas zu veranschaulichen, betrachten wir wie bei der Addition paralleler Geschwindigkeiten den Sonderfall βx = βy. Aus der Galilei-Transformation folgt dann der Geschwindigkeitsbetrag Wir finden stattdessen Wieder kann die Gesamtgeschwindigkeit natürlich maximal gegen den Wert β = 1 gehen. Abb. 3.6 dient dem Vergleich dieses Ergebnisses mit dem Fall paralleler Addition und der Galilei-Transformation. Nicht nur der Betrag der Geschwindigkeit, sondern auch ihre Richtung unterscheidet sich vom nichtrelativistischen Fall. Bei der Galilei-Transformation ist der Winkel des Geschwindigkeitsvektors relativ zur x-Achse immer . Da für große βx der Faktor 1∕γx gegen Null geht, finden wir als Grenzwinkel für große Geschwindigkeiten in der SRT dagegen φ → 0, d. h. die resultierende Geschwindigkeit zeigt fast in Richtung der x-Achse. Gleichzeitig gilt für den Rotationswinkel mit (3.48)
Abb. 3.6
Betrag der Gesamtgeschwindigkeit bei Addition zweier gleich großer senkrecht stehender Geschwindigkeiten βx und βy in der SRT und nach der Galilei-Transformation
(3.53)
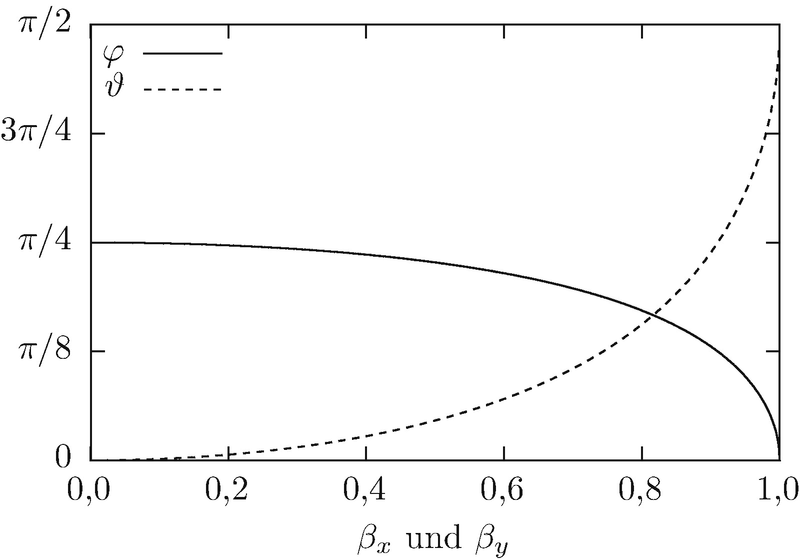
Das Argument des Arkuskosinus geht für große Geschwindigkeiten gegen Null, d. h. der Grenzwinkel ist 𝜗 → π∕2, das resultierende Koordinatensystem ist um 90° verdreht (s. Abb. 3.7).
Abb. 3.7
Drehwinkel 𝜗 und Geschwindigkeitsrichtung φ bei Addition zweier gleich großer senkrecht stehender Geschwindigkeiten βx und βy
3.5 Minkowski-Diagramm
Die graphische Darstellung von eindimensionalen Bewegungen erfolgt für gewöhnlich in Form eines Weg-Zeit-Diagramms mit der Zeit auf der Ordinate und dem zurückgelegten Weg auf der Abszisse. Einen Punkt innerhalb des Weg-Zeit-Diagramms nennt man auch ein Ereignis, welches zu einem bestimmten Zeitpunkt an einem bestimmten Ort stattfindet. Die jeweiligen Achsenabschnitte heißen Koordinaten des Ereignisses.
Im Hinblick auf die Relativitätstheorie müssen wir uns nun klar werden, dass ein Ereignis unabhängig von jedweden Koordinaten stattfindet. Um aber Berechnungen durchführen zu können, müssen wir uns auf ein Koordinatensystem einigen, sodass wir dem Ereignis Koordinaten zuweisen können.
Der genaue Ursprung des Koordinatensystems ist dabei willkürlich, und auch eine etwaige Bewegung kann, solange wir im Bereich der Newton’schen Mechanik bleiben, aufgrund der Galilei-Invarianz einfach wegtransformiert werden. Gehen wir zur SRT über, müssen wir dem Bewegungszustand eines Beobachters größere Aufmerksamkeit schenken.
Das Minkowski-Diagramm3 ist die Erweiterung des gewöhnlichen Weg-Zeit-Diagramms hin zur Darstellung von Ereignissen in zwei sich relativ zueinander bewegenden Bezugssystemen. Die Koordinatentransformation zwischen beiden Systemen ist durch die Lorentz-Transformation gegeben, die im Minkowski-Diagramm veranschaulicht werden soll. Wir beschränken uns hier auf das 1 + 1 D-Minkowski-Diagramm bestehend aus einer Raum- und einer Zeitachse. Im Fall der Bewegung in x-Richtung lautet die zugehörige Lorentz-Transformation
(3.54)
Multiplizieren wir die Zeit-Achse mit der Lichtgeschwindigkeit c durch und skalieren wir die x- und die ct-Achse gleich, so bewegen sich Lichtstrahlen auf Geraden mit Steigung ± 45°. Zeichnen wir die in positive und negative x-Richtung laufenden Lichtstrahlen für ein bestimmtes Ereignis E ein, so wird das Minkowski-Diagramm in drei unterschiedliche Bereiche aufgeteilt, die die kausale Struktur der Raumzeit wiederspiegeln (s. Abb. 3.8).
Abb. 3.8
Minkowski-Diagramm mit Ereignis E und zugehörigem Lichtkegel, der raumartige und zeitartige Ereignisse trennt. Die gestrichelte Linie zeigt die Weltlinie eines Beobachters, der sich mit konstanter Geschwindigkeit in positiver x-Richtung bewegt und das Ereignis E durchläuft
Man bezeichnet diese separierenden Lichtstrahlen auch als zukunfts- beziehungsweise vergangenheitsgerichtete Lichtkegel. Alle Ereignisse, die sich innerhalb des zukunftsgerichteten Lichtkegels befinden, können von dem Ereignis E prinzipiell beeinflusst werden. Dies kann entweder durch ein massebehaftetes Teilchen, welches sich auf einer zeitartigen Trajektorie mit einer Geschwindigkeit v < c bewegt, oder durch einen Lichtstrahl auf einer lichtartigen Bahn sein. Dementsprechend können alle Ereignisse innerhalb des vergangenheitsgerichteten Lichtkegels Einfluss auf E nehmen. Alle anderen Ereignisse sind kausal von dem Ereignis E entkoppelt und werden als raumartig zu E bezeichnet.
Wir wollen uns nun überlegen, wie zwei Bezugssysteme S und S′, die über die Lorentz-Transformation (3.54) verknüpft sind, in ein Diagramm eingezeichnet werden können. Sei S das ruhende Bezugssystem mit den Koordinatenachsen ct und x, und S′ das dazu bewegte System. Ein Beobachter, der im System S′ im Ursprung ruht, erfüllt die Beziehung x′ = γ(x − βct) = 0. Seine zeitartige Trajektorie, auch Weltlinie genannt, wird daher durch die Gleichung ct = x∕β beschrieben. Alle Ereignisse, die gleichzeitig zu t′ = 0 stattfinden, werden durch die Beziehung ct′ = γ(ct − βx) = 0 definiert, was uns zur Geradengleichung ct = βx führt. Beide Geraden liefern uns bereits die Koordinatenachsen des Systems S′, wobei der Winkel
(3.55)
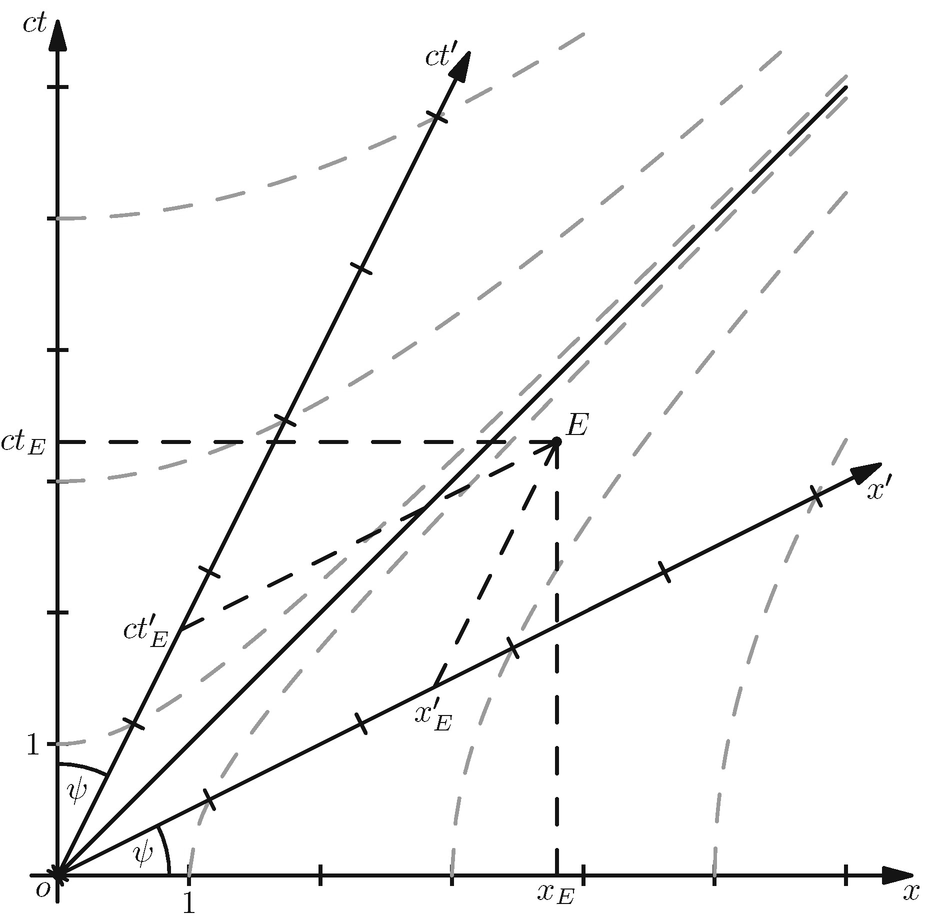
zwischen der ct- und der ct′-Achse gleich dem Winkel zwischen der x- und der x′-Achse ist (s. Abb. 3.9).
Abb. 3.9
Minkowski-Diagramm für ein Bezugssystem S′, welches sich mit der Geschwindigkeit β = 0,5 relativ zu S bewegt. Die gestrichelten Hyperbeln repräsentieren die Invarianz-Beziehung s2 = |ct2 − x2| = |ct′2 − x′2| = s′2. Die Winkelhalbierende entspricht einem Lichtstrahl, der zur Zeit t = t′ = 0 vom Beobachter im Ursprung in positive x-Richtung emittiert wird
Die Skalenstriche (engl. ticks) entlang der Koordinatenachsen können ebenfalls direkt aus der Lorentz-Transformation hergeleitet werden. Im Fall der ct′-Achse gilt weiterhin x′ = 0, also ct = x∕β, und zusätzlich ist ct′ = γ(ct − βx) = n mit . Daraus folgen die Koordinaten (ct = nγ, x = nβγ) der Ticks bezogen auf S. Eine analoge Rechnung liefert uns die Koordinaten der Ticks entlang der x′-Achse, (ct = nβγ, x = nγ). Wir hätten die Ticks auch durch die Schnitte der Hyperbeln s2 = |ct2 − x2| = |ct′2 − x′2| = s′2 = n2 mit den Koordinatenachsen bestimmen können.
Die Koordinaten eines Ereignisses E können wir nun sowohl bezogen auf das System S, als auch bezüglich S′ ermitteln. Die orthogonale Projektion von E auf die Achsen x und ct liefert uns die Koordinaten in S. Die Achsenabschnitte bezogen auf S′ erhalten wir durch Parallelverschiebung der x′- bzw. ct′-Achse durch das Ereignis E. Diese Konstruktion ergibt sich, da Ereignisse zur gleichen Zeit bzw. am gleichen Ort jeweils parallel zu den entsprechenden Achsen liegen müssen.
3.6 Übungsaufgaben
3.6.1 Galilei-Invarianz der Newton’schen Bewegungsgleichungen
Zeigen Sie, dass die Newton’schen Bewegungsgleichungen (3.1) gegenüber der Galilei-Transformation (3.2) invariant sind.
3.6.2 Geschwindigkeitsadditionstheorem und der Fizeau-Versuch
In Abschn. 2.3 haben wir den von Fizeau durchgeführten Versuch zur Äthermitbewegung kennengelernt. Zeigen Sie, dass sich (2.14) aus dem Geschwindigkeitsadditionstheorem (3.37) ergibt.
3.6.3 Geschwindigkeitsadditionstheorem bei Verwendung der Rapidität
Zeigen Sie, dass der Zusammenhang (3.40) gilt, welcher besagt, dass bei zwei hintereinander ausgeführten Boosts in gleiche Richtung sich die Rapiditäten addieren. Verwenden Sie dazu die Additionstheoreme
(3.56a)
(3.56b)
für die hyperbolischen Funktionen, sowie die Definitionen
 in einem beliebig gewählten Koordinatensystem bestimmt. Jeder Zeitpunkt kann durch die Zeit t relativ zu einem beliebig gewählten Zeitnullpunkt (z. B. der Greenwichzeit) angegeben werden.
in einem beliebig gewählten Koordinatensystem bestimmt. Jeder Zeitpunkt kann durch die Zeit t relativ zu einem beliebig gewählten Zeitnullpunkt (z. B. der Greenwichzeit) angegeben werden.
 die das Punktteilchen erfährt, hängt also von der äußeren Kraft F und seiner trägen Masse m ab. Aus diesem Differentialgleichungssystem ergibt sich die Bahnkurve r(t) des Teilchens. Nach dem klassischen Verständnis von Raum und Zeit gelten die Gesetze der Newton’schen Mechanik in jedem Inertialsystem
(s. Abschn. 2.4).
die das Punktteilchen erfährt, hängt also von der äußeren Kraft F und seiner trägen Masse m ab. Aus diesem Differentialgleichungssystem ergibt sich die Bahnkurve r(t) des Teilchens. Nach dem klassischen Verständnis von Raum und Zeit gelten die Gesetze der Newton’schen Mechanik in jedem Inertialsystem
(s. Abschn. 2.4).

 ausbreiten, die nach (1.8) mit der elektrischen Feldkonstante ε0 und der magnetischen Feldkonstante μ0 verknüpft ist.
ausbreiten, die nach (1.8) mit der elektrischen Feldkonstante ε0 und der magnetischen Feldkonstante μ0 verknüpft ist.

 Da nun die Lichtgeschwindigkeit in allen Systemen gleich groß sein soll, muss auch
Da nun die Lichtgeschwindigkeit in allen Systemen gleich groß sein soll, muss auch  gelten, wobei (x′, y′, z′) und t′ zusammen den gleichen Punkt in Raum und Zeit, jedoch in anderen Koordinaten, beschreiben. Quadrieren und Umsortieren führt auf die beiden Beziehungen
gelten, wobei (x′, y′, z′) und t′ zusammen den gleichen Punkt in Raum und Zeit, jedoch in anderen Koordinaten, beschreiben. Quadrieren und Umsortieren führt auf die beiden Beziehungen



 auf, die wir auch noch loswerden müssen. Durch die Wahl für α haben wir aber erreicht, dass vor x2 und c2t2 der gleiche Faktor steht. Das hilft uns, einen verbesserten Ansatz zu finden.
auf, die wir auch noch loswerden müssen. Durch die Wahl für α haben wir aber erreicht, dass vor x2 und c2t2 der gleiche Faktor steht. Das hilft uns, einen verbesserten Ansatz zu finden.



 ! Die Geschwindigkeiten, mit denen wir uns im Alltag bewegen, sind also viel zu gering, als dass der Unterschied zwischen Lorentz- und Galilei-Transformation zu erkennen wäre.
! Die Geschwindigkeiten, mit denen wir uns im Alltag bewegen, sind also viel zu gering, als dass der Unterschied zwischen Lorentz- und Galilei-Transformation zu erkennen wäre.




 und nicht einfach aus
und nicht einfach aus  ist, besprechen wir in Kap. 5.
ist, besprechen wir in Kap. 5.


 hat die Komponenten xμ aus (3.16).
hat die Komponenten xμ aus (3.16).

 gilt. Die Standard-(3 × 3)-Drehmatrizen um die x-, y- bzw. z-Achse lauten
gilt. Die Standard-(3 × 3)-Drehmatrizen um die x-, y- bzw. z-Achse lauten





 . Man erkennt die große Ähnlichkeit der Drehmatrix zum Boost (3.25)
. Wenn man außerdem noch die Verwandschaft der trigonometrischen Funktionen ,,
. Man erkennt die große Ähnlichkeit der Drehmatrix zum Boost (3.25)
. Wenn man außerdem noch die Verwandschaft der trigonometrischen Funktionen ,, “ und ,,
“ und ,, “ und der hyperbolischen Funktionen ,,
“ und der hyperbolischen Funktionen ,, “ und ,,
“ und ,, “ berücksichtigt, es gilt ja z. B.
“ berücksichtigt, es gilt ja z. B.  , wird diese Ähnlichkeit noch größer. Die Lorentz-Boosts sind also Drehungen um hyperbolische Winkel im Minkowski-Raum.
, wird diese Ähnlichkeit noch größer. Die Lorentz-Boosts sind also Drehungen um hyperbolische Winkel im Minkowski-Raum.















 eingeführt, mit der sich die Lorentz-Boosts analog zu Drehmatrizen mit dem hyperbolischen Winkel θ formulieren lassen. Für zwei hintereinander ausgeführte Drehungen, z. B. um die z-Achse, mit den Drehwinkeln φ1 und φ2 gilt
eingeführt, mit der sich die Lorentz-Boosts analog zu Drehmatrizen mit dem hyperbolischen Winkel θ formulieren lassen. Für zwei hintereinander ausgeführte Drehungen, z. B. um die z-Achse, mit den Drehwinkeln φ1 und φ2 gilt


 und
und  . Die Hintereinanderausführung dieser beiden Boosts ergibt
. Die Hintereinanderausführung dieser beiden Boosts ergibt







 für 𝜗 ∈ [0, π∕2] erhält man dann noch
für 𝜗 ∈ [0, π∕2] erhält man dann noch
 kann man zeigen, dass (3.46c) auf die gleiche Relation führt.
kann man zeigen, dass (3.46c) auf die gleiche Relation führt.



 Wir finden stattdessen
Wir finden stattdessen  Wieder kann die Gesamtgeschwindigkeit natürlich maximal gegen den Wert β = 1 gehen. Abb. 3.6 dient dem Vergleich dieses Ergebnisses mit dem Fall paralleler Addition und der Galilei-Transformation. Nicht nur der Betrag der Geschwindigkeit, sondern auch ihre Richtung unterscheidet sich vom nichtrelativistischen Fall. Bei der Galilei-Transformation ist der Winkel des Geschwindigkeitsvektors relativ zur x-Achse immer
Wieder kann die Gesamtgeschwindigkeit natürlich maximal gegen den Wert β = 1 gehen. Abb. 3.6 dient dem Vergleich dieses Ergebnisses mit dem Fall paralleler Addition und der Galilei-Transformation. Nicht nur der Betrag der Geschwindigkeit, sondern auch ihre Richtung unterscheidet sich vom nichtrelativistischen Fall. Bei der Galilei-Transformation ist der Winkel des Geschwindigkeitsvektors relativ zur x-Achse immer  . Da für große βx der Faktor 1∕γx gegen Null geht, finden wir als Grenzwinkel für große Geschwindigkeiten in der SRT dagegen φ → 0, d. h. die resultierende Geschwindigkeit zeigt fast in Richtung der x-Achse. Gleichzeitig gilt für den Rotationswinkel mit (3.48)
. Da für große βx der Faktor 1∕γx gegen Null geht, finden wir als Grenzwinkel für große Geschwindigkeiten in der SRT dagegen φ → 0, d. h. die resultierende Geschwindigkeit zeigt fast in Richtung der x-Achse. Gleichzeitig gilt für den Rotationswinkel mit (3.48)




 . Daraus folgen die Koordinaten (ct = nγ, x = nβγ) der Ticks bezogen auf S. Eine analoge Rechnung liefert uns die Koordinaten der Ticks entlang der x′-Achse, (ct = nβγ, x = nγ). Wir hätten die Ticks auch durch die Schnitte der Hyperbeln s2 = |ct2 − x2| = |ct′2 − x′2| = s′2 = n2 mit den Koordinatenachsen bestimmen können.
. Daraus folgen die Koordinaten (ct = nγ, x = nβγ) der Ticks bezogen auf S. Eine analoge Rechnung liefert uns die Koordinaten der Ticks entlang der x′-Achse, (ct = nβγ, x = nγ). Wir hätten die Ticks auch durch die Schnitte der Hyperbeln s2 = |ct2 − x2| = |ct′2 − x′2| = s′2 = n2 mit den Koordinatenachsen bestimmen können.

