B → A”. Suppose p is not the polar of P (this is supposing “B”). Then p is joined to some line x on P by a point, call it “Q” (Fig. 16) [D2*]. But then P is joined to Q on p by the line x [A0,D1]. Therefore, P is not a pole of p [D2].
B → A”. Suppose p is not the polar of P (this is supposing “B”). Then p is joined to some line x on P by a point, call it “Q” (Fig. 16) [D2*]. But then P is joined to Q on p by the line x [A0,D1]. Therefore, P is not a pole of p [D2].IV: |
ABSTRACT |
It is a revealing experiment to pose the question: “What is a point?” to a mathematics class. Typical responses are: “A point is a position in space”, “A point has no length or width”, “A point is the intersection of two lines”, “A point has location but no dimensions”. It is easy enough to point out how each of these attempts fails as a definition. If now the questioner persists in posing the question, the responses dwindle, and the class may well fall into an angry frustrated silence. What is of interest here is that only rarely will any student take issue with the legitimacy of the question. It seems quite proper to the student that after studying plane geometry for a year he ought to be able to define a point in the same sense that he is able to define a triangle or circle.
Of course, the question is not legitimate since the word “point” in geometry is not defined in the usual sense at all. The words “point”, “line”, “distance”, “on”, and some others, are primitive notions or undefined words of the system. They are taken as undefined in order to avoid circularity of definitions.
It seems intuitively clear that any attempt to define every geometric word must lead to circularity of some sort. Consider, for instance, an immense dictionary containing all the one-half million or more words in the English language. Each word in this dictionary is defined in terms of other English words, also of necessity in the dictionary. It seems inevitable if one starts to track down the definition of “point” by looking up its definition, then looking up all the words in its definition and so on, that one sooner or later comes upon a word whose definition uses the word “point”, and a circularity has occurred.
On the other hand, given a set of undefined words of geometry designated by such symbols as “point”, “line”, “distance”, “on”, “between”, it will be possible to define further words in terms of these undefined words. It is possible to compose statements using these words, and it may be possible to order these statements into a system in which it can be shown that some of the statements follow logically from a small subset regarded as axioms. Such a program presupposes a basic language and requires a system of logic that describes how a statement follows from other statements.
The familiar axiom of Euclidean geometry,
Through two distinct points there is one and only one line,
is a mixture of the underlying language (in this case English) and primitive notions or undefined words of geometry, which have been italicized. In viewing Euclidean geometry as a formal system, it must be emphasized that the primitive notions must be regarded as meaningless. A surveyor may regard the cross hairs in the telescope of his transit as a point and may regard his line of sight as a line, or regard a string held taut by a plumb bob as a line. To a carpenter, a line may be in practice the edge of a plank or a streak of chalk deposited on a board by snapping a chalk-laden string. Point and line to a draftsman may be a dot of ink and a streak of ink made by a pen on drafting paper. All of these so-called lines and points have many properties not attributed to the lines and points of geometry and must be regarded as pictures or interpretations of geometric lines and points.
To put it another way, the carpenter, the surveyor, and the draftsman each has his own interpretation of the axioms of Euclidean geometry. Each finds Euclidean geometry to be a satisfactory body of statements about the behavior of points, lines, and so on, as he interprets these words. But Euclidean geometry as a formal system has to be considered as uninterpreted.
Note that even though uninterpreted, the axioms of geometry tell us all we need to know about the properties of the undefined words of geometry. While the axioms do not tell us what the undefined words mean, they do define the properties of the undefined words in the sense that any statement about them is proved or disproved on the basis of the axioms.
The notion of an abstract mathematical system can be summarized as follows. The basic elements are:
1. An underlying language
2. A deductive logic system
3. A vocabulary of undefined words
4. A set of axioms—statements about the undefined words
5. Theorems—statements about the undefined words that can be demonstrated, as in Secs. 3.8 to 3.11
Before going on to an example of an abstract mathematical system, a miniature geometry, a comment about definitions is, perhaps, in order. In an uninterpreted abstract system, a definition is a statement of equivalence that is used to introduce new, and generally shorter, names for more complex statements. In theory, an abstract system can be built without definitions but with a great loss of economy in use of words. In plane geometry, for instance, instead of introducing the name “triangle”, the description “three points not on the same line and the three line segments determined by them” might be used.
Definitions in mathematics often appear in the form of conditional statements, but nevertheless they are always to be taken as statements of equivalence. Although the statement,
A triangle is isosceles if it has two equal sides,
does not say so, it is to be understood that “if a triangle is isosceles, it has two equal sides”. The definition is correctly stated:
A triangle is isosceles if and only if it has two equal sides.
The form of definition in which the “only if” remains tacit is quite common in higher mathematics and causes no trouble there. In elementary mathematics, where some students have a tendency to treat all conditionals as statements of equivalence, it might be wise to state definitions in the if-and-only-if form.
To illustrate the notion of an abstract mathematical system, we shall describe one having just three undefined words and six axioms. The resulting structure is limited enough to view as a whole and yet has enough complexity to serve as a fair model of all abstract mathematical systems.
Before we begin a description of the system, a note on notation is in order. Axioms will be designated by a capital “A” and a subscript, definitions by a capital “D” and a subscript, and theorems by a capital “T” and a subscript. Lower-case letters will be used to refer to lines and upper-case letters to points.
Undefined words: “point”, “line”, “on”.
Axioms and definitions:
A0: Point P is on line q if and only if line q is on point P.
A1: There exists at least one line.
A2: There are exactly three distinct points on every line.
D1: A number of points are said to be joined by a line s if and only if all the points are on s.
D1*: A number of lines are said to be joined by a point S if and only if all the lines are on S.
D2: A point P is called a pole of a line p if and only if P is not joined to any point on p by a line.
D2*: A line p is called a polar of a point P if and only if p is not joined to any line on P by a point.
NOTE: The pole-polar relation will be frequently indicated by using the same letters, upper and lower case.
A3: Every line has exactly one pole.
A4: Every point has exactly one polar.
A5: If a point P is not on line x but is joined to a point on x by a line m, then P is joined to exactly one other point on x by a line n distinct from m.
While we have named the undefined words “point”, “line”, “on”, recall that the undefined words are meaningless and might as well be called by any other names, say “goo”, “oog”, “over”. With these names, Axiom 2 would read:
There are exactly three distinct goos over every oog.
It will be easier to follow the development of theorems in the system if we continue to use the more familiar words “point ”, “line”, “on”, but we emphasize that the words are meaningless and must not be taken as names of real objects or relations. Furthermore, it will not do to confuse these points and lines with the points and lines of Euclidean geometry. From Axiom A2, for example, it is clear that our lines, at least, are not Euclidean lines. The properties of our points and lines are given by the axioms, just as the properties of Euclidean points and lines are given by the Euclidean axioms.
The proofs that follow will not be complete demonstrations as described in Sec. 3.8, since even in this miniature system complete demonstrations are prohibitively lengthy. The proofs will be abbreviated but will illustrate many of the formal notions so far developed. The proofs will not be displayed in column form, but the source of each statement will be indicated by naming the axiom, theorem, or definition that applies. The name will appear inside square brackets following the statement.
Preceding the statement and proof of the first theorem of our system are two lemmas. A lemma is a theorem; however, it is a theorem whose interest lies not so much in its result but in its application in the proofs of other theorems whose results are of more moment, or of greater interest.
Lemma 1: Point P is a pole of line p if and only if line p is a polar of point P.
Proof: By using the notational convention regarding pole-polar relations, the lemma may be written
P is a pole of p ↔ p is a polar of P.
If the left member is translated as “A” and the right member as “B”, the lemma can be written “A ↔ B”.
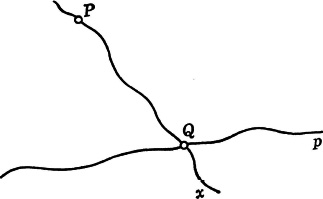
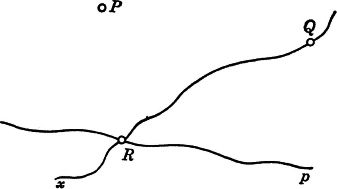
Proof of “A → B”: Use the contrapositive method of proof, that is, prove “B → A”. Suppose p is not the polar of P (this is supposing “B”). Then p is joined to some line x on P by a point, call it “Q” (Fig. 16) [D2*]. But then P is joined to Q on p by the line x [A0,D1]. Therefore, P is not a pole of p [D2].
FIG. 16.
What has been established here is “A0, …, A5, B  A”; hence, by the deduction principle, we have “A0, …, A5 B → A”. Then, by contrapositive equivalence (2.42) and substitution, Sec. 2.11, we are assured
A”; hence, by the deduction principle, we have “A0, …, A5 B → A”. Then, by contrapositive equivalence (2.42) and substitution, Sec. 2.11, we are assured

Proof of “B → A”: The assertion can be proved by showing “A → B”, and is left as an exercise.
Lemma 2: If point P is not joined to two points on p, then P is a pole of p.
Proof: The lemma is a statement in the form “A → B”. Again we employ a contrapositive form of proof, starting with “B”.
Suppose P is not a pole of p. Then P is joined to some point X on p by a line [D2]. Now, P is on p, or P is not on p [an instance of the valid formula (2.36)].
Case I: P is joined to X on p by a line, and P is on p.
In addition to P and X on p, there is a third point on p [A2], call it “Y”. But P is joined to Y by p [D1]; so we have that P is joined to two points on p, contradicting the hypothesis “A”, that is, that P is not joined to two points on p.
Case II: P is joined to X on p by a line, and P is not on p.
With the assumption of Case II as minor premise, the axiom “A5” as major premise, we have by modus ponens that P is joined to some point on p other than X. So again, P is joined to two points on p, contradicting the hypothesis “A”.
It follows that “B” leads to “A”, and we conclude as in the proof of Lemma 1.
It is interesting to spell out the logical form of this proof, as it is a variant of a proof by cases. We started with
1. “B”
and, using the definition of a pole, got
2. “B → C”
So
3. “C” by modus ponens
Now,
4. “S∨S” is a valid formula,
so
5. “C(S∨S)” by conjunctive inference. (This was tacit in the proof.)
In Case I we proved
6. “CS → A”
7. “CS → A”,
so
8. “(CS∨CS) → A”. Inference by cases (2.78).
But,
9. “C(S∨S) ↔ (CS∨CS)” by the distribution formula (2.48).
So, by substitution,
10. “C(S∨S)→ A”,
and so
11. “A” by modus ponens [5, 10].
Steps 1 to 11 show that “B” leads to “A” and the proof concludes as in the proof of Lemma 1.
T1: Two distinct points are not joined by more than one line.
Proof: The form of the proof is indirect. We start with “T1” and show that this leads to a denial of “A4”, that is, to “A4”.
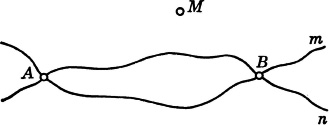
Suppose that there are two distinct points A and B, and A and B are joined by more than one line (Fig. 17). Then there are at least two distinct lines, m and n, joining A and B.
FIG. 17.
Now, line m has a unique pole M [A3]. But, since M is not joined to A or B on n, M is also a pole of n [Lemma 2].
Then m and n are polars of M [Lemma 1], and since m and n are distinct, we have a denial of “A4”, that is, we have established “A4”, and the indirect proof is complete.
Theorem T1 is also a true theorem about Euclidean points and lines. That is, the same statement follows from the axioms of Euclidean geometry. About Euclidean points and lines we can say, in addition to “T1”,
Every two points are joined by a line.
For the points and lines of our geometry this statement is false, for if point P is the pole of line p, then P is not joined to any of the three points on p; so there are pairs of points in our geometry not joined by any line.
With “T1” we have established that if a pair of points are joined by a line, then the line is unique. Clearly there are pairs of points that are joined [A1, A2]. The next theorem throws light on the pole-polar relation.
T2: If P is the pole of p, and Q is the pole of q, and P is on q, then Q is on p.
Proof: Using the notational convention for indicating the pole-polar relation, we may write the statement “T2” in the shorter form

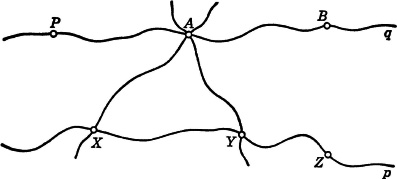
Since P is on q [hyp], there exist exactly two other points on q [A2], call them “A” and “B” (Fig. 18).
FIG. 18.
P is the pole of p [hyp]; therefore A is not the pole of p [A3]. Hence, A is joined to some point on p [D2]; call it “X”. A is also joined to exactly one other point on p [A5]; call it “Y”.
There is a third point on p different from X and Y [A2]; call it “Z”. A and Z are not joined [A5]; P and Z are not joined [D2]; hence Z is a pole of q [Lemma 2].
But Q is the pole of q [hyp], so that Z = Q [A3], and we conclude that Q is on p.
T3: If A, B, and C are joined by 1, then the polars a, b, and c are joined by L, which is the pole of 1.
Proof: Suppose A, B, and C are joined by 1 [hyp]. A on 1 implies a on L [T2], hence, a on L [mod pon]. Similarly, b on L and c on L. That is, a, b, and c are joined by L [D1*].
Definition: “Point” and “line” are called dual words. That is, we say the dual of “point” is “line”, or the dual of “line” is “point”. “Pole” and “polar” are also dual words. “On” and “join” are each self-dual. If “S” is a statement in the geometry, then its dual statement, denoted by “S*”, is obtained from “S” by replacing each undefined or defined word in “S” by its dual.
It follows from the definition that “S*” is a statement in the geometry, that is, a statement about the terms and relations of the geometry. It is obvious that “(S*)*” is the same statement as “S”.
We have not given the foregoing definition a designation “D3”, because the definition is not a statement within the geometry but is a statement about the geometry. The statement “A2”, for instance, is a statement about points and lines, whereas the foregoing definition is a statement about “statements of the geometry”. The notion of duality is a little like the notion of inference in that it gives a way of deriving new statements from given statements.
Examples of dual statements have been encountered already. “D1” and “D1*” are dual as are “D2” and “D2*”. The notion of duality is useful, because we shall show that if a statement in the geometry is true, then so is its dual. To establish this, we first prove the next six theorems.
T4: (A0*) Line p is on point Q if and only if point Q is on line p.
Proof: The statement is just “A0” with an obvious permutation of names and clauses.
T5: (A1*) There exists at least one point.
Proof: There exists a line [A1] that has a pole [A3].
T6: (A2*) There exist exactly three distinct lines on every point.
Proof: Let L be a given point [hyp]. L has a unique polar [A4], call it “1”. 1 has exactly three distinct points on it [A2], call them “A”, “B”, and “C”. Now,

hence,

From A3, it follows that
(a and b are not distinct) → (A and B are not distinct);
hence,
Similarly, a and c, and b and c, are distinct. Thus, we have at least three distinct lines on L.
Suppose there is a fourth line d on L and distinct from a, b, or c. Now,

so,

Now,

but a ≠ d; hence,

Similarly, B ≠ D and C ≠ D, so that 1 joins four distinct points [conj inf], which contradicts “A2”.
We conclude that there is not a fourth line d on L.
T7: (A3*) Every point has exactly one polar.
T8: (A4*) Every line has exactly one pole.
Proof: The proofs of “T7” and “T8” are trivial.
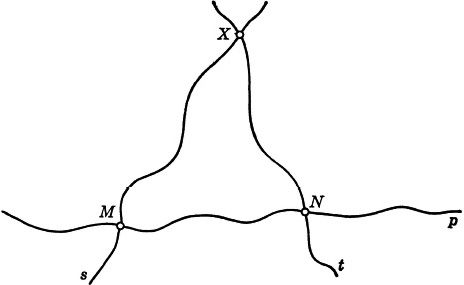
T9: (A5*) If a line p is not on a point X, but is joined to a line on X by a point M, then p is joined to exactly one other line on X by a point N distinct from M.
FIG. 19.
Proof: Point X is not on p, but a line on X, call it “s”, is joined to p by a point M (Fig. 19) [hyp]. X and M are joined by s [D1]; hence, X is joined to exactly one other point on p by a line, call it “t”, distinct from s [A5]. Call this point “N”, then N joins t and p [D1*], and t is on X [A0]. So the theorem is proved.
With the proofs of T4 to T9 we have shown that the dual of every axiom is a theorem of the geometry. It is now possible to state and justify the duality principle.
Duality Principle: If “S” is a proved statement in the geometry, then the dual “S*” can be proved.
Proof: Suppose there exists a sequence of statements,

that is a demonstration of

Then, consider the sequence of statements

There remains to be shown that each of the “Si*” satisfies the requirements of one of the four categories for statements in a demonstration, as given in Sec. 3.8. In other words we must check to see if an “Si*” is an axiom, or is in the form of a valid statement formula, or follows from earlier statements by means of an established inference rule, or is a repetition of an earlier statement in the sequence.
Suppose “Si” is one of the axioms “A0” to “A5”. Then “Si*” is clearly the dual of this axiom.
If “Si” is in the form of a valid statement formula, then so is “Si*”.
If “Si” is the result of an inference from earlier “S’s”, say

then, clearly,

is a similar inference.
Finally, if “Si” is a repetition of some earlier “Sj”, then “Si*” is a repetition of “Sj*”.
It follows that (4.1) is a demonstration of

While the proof of “T4”, for example, was not a demonstration of

it gives assurance that such a demonstration exists. Similarly, there exist demonstrations of the remaining duals of the axioms. Thus, with (4.2) and the six statements of which (4.3) is the first, by (3.25) we know that a demonstration of

exists, and the duality principle is established.
The principle is in effect a special derived inference rule that holds for statements of the geometry. The statement of the duality principle is not itself a statement within the geometry but is a statement about statements of the geometry. (Recall that a statement within the geometry is about the undefined or defined words of the geometry.)
We did not mention definition in arguing the duality principle because definitions are just a convenience and not a formal necessity. It is not necessary, for example, to use the word “join”. Instead of “A and B are joined by x” we can say “A is on x and B is on x”. Similarly, we could dispense with the words “pole” and “polar”. Of course, it is impractical to try to get along without definitions, and we shall continue to use them. However, so as not to disturb the use of the duality principle, when a new word is defined, we must take care that the dual of its definition is taken as defining the dual word. This was the case in defining “join” and “pole” and “polar”. We proceed to define a new word “triangle”.
D3: A triangle consists of three points not on a line and three lines not on a point, with each pair of points joined by one of the lines, and each pair of lines joined by one of the points. The points are called vertices. The lines are called sides.
Vertex and side are dual words. Triangle is a self-dual word.
That the definition is self-dual can be verified by writing out the dual and comparing the two statements. Further we define:
D4: A triangle is called perspective from a point C if and only if its three vertices are on three lines joined by C, with exactly one vertex on each line.
C is called the center.
D4*: A triangle is called perspective from a line c if and only if its three sides are on the three points joined by c, with exactly one side on each point.
c is called the axis.
In these definitions “center” and “axis” are dual words. The definitions are duals of each other.
Before proceeding to theorems about triangles, we pause to prove a useful theorem.
T10: If two distinct points are not joined by a line, then each lies on the polar of the other.
Proof: Using the conventions of the pole-polar relation notation, “T10” can be written:
(P and Q not joined by a line) → (P on q)(Q on p).
The form of the proof will be that of an indirect proof by cases. Hence, assume
(4.4) (P and Q not joined by a line)[(P on q)(Q on p)]
Now, by the valid form (2.38),
(4.5) [(P on q)(Q on p)] ↔[(P on q)∨(Q on p)].
From (4.4), using conjunctive simplification,

and with (4.5), by modus ponens we conclude

is true. We now proceed to the proof that each of the cases leads to a contradiction.
Case I: Assume
(P and Q not joined by a line)(Q on p).
Since P is the pole of p [hyp], Q is not the pole of p [A3]; so Q is joined to some point on p [D2], say “R”, by a line we shall call “x” (Fig. 20). Now,

(P not joined to R)(P not joined to Q) → (P is a pole of x)
is an instance of Lemma 2. Hence,

Then x is the polar of P [Lemma 1], and p is the polar of P [Lemma 1], x is distinct from p, since we have Q on x and (Q on p), [hyp of the case]. Thus P has two polars, contradicting “A4”.
Case II: Assume
(P and Q not joined by a line)(P on q).
A proof that this leads to a contradiction of “A4” is similar to Case I.
FIG. 20.
With the proof of Case II, the indirect proof by cases is complete. The form of the proof, in outline, was as follows.
To prove:

In Case I, we proved

In Case II,

Hence, by the deduction theorem,

Therefore, by the method of proof by cases, Sec. 3.4,

So we have

or by substitution from (2.48),

and by substitution from De Morgan’s law (2.38),

or, finally, by substitution in (2.41)

We are now ready to prove a theorem about the existence of triangles. Triangles have been defined, but, of course, a definition never asserts existence. In Euclidean geometry, for example, parallel lines are defined to be lines that do not intersect, but the existence of parallel lines is given in an axiom. It is easy enough to define words that do not name anything existing in the system. For instance, in Euclidean geometry we might agree to call any triangle having an interior angle greater than 300° a “purple triangle”. But we could never prove the existence of purple triangles from the axioms of Euclidean geometry.
It would be easy to prove the mere existence of a triangle in the miniature geometry. The next theorem can be used to prove existence of triangles, but asserts a great deal more than mere existence, and consequently has a rather long proof.
T11: Every point has exactly two triangles perspective from it.
NOTE: From now on, it will be convenient to use a new notation for lines. If X and Y are joined by a line, we shall designate this line by the symbol “(XY)”. We shall also designate the triangle whose vertices are X1, X2, X3, by the symbol “(X1X2X3)”.
FIG. 21.
Proof: Call the point “P”. P joins just three lines [A2*], call them “l1”, “l2”, and “l3”.
l1 has exactly two other points on it [A2]. Call them “X1” and “Y1”. X1 is joined to l2 at P [hyp]; so X1 is joined to exactly one other point on l2 [A5], call it “X2” (see Fig. 21).
Similarly, X1 is joined to some point of l3 other than P. Call it “X3”.
Similarly, X2 is joined to a point on l3 different from P, call it “F” (Fig. 21).
We would like to prove that F = X3 so that (X1X2X3) is a triangle. We proceed indirectly.
Suppose X3 ≠ F.
Now, the figure suggests that there are three lines joined by X2. Let us prove that they are indeed all distinct. If (X1X2) is the same line as l2, that is, (X1X2) = l2, then X1 is on l2 and l1 = l2 [T1]. But we have l1 ≠ l2, so we have (X1X2) ≠ l2 [contrap. inf.].
Similarly, (X2F) ≠ l2.
Finally, if (X1X2) = (X2F), then P is joined to all three points of this line, which contradicts “A5”. Thus, there are three distinct lines (X1X2), (X2F), and l2 joined by X2. By “A2*” these are the only lines on X2.
Now,

But

Therefore,

Hence, either (X2P) or (X2F) or (X1X2) is the polar of X3 [T10], but this is impossible, since we already have that X3 is joined to a point on each of these lines [D2*].
The contradiction shows that X3 ≠ F is false, or that X3 = F is true.
It remains to show that X1, X2, and X3 are vertices of a triangle. Two distinct lines are not joined by more than one point [T1*], thus, since l1 and l3 are joined by P, X1 ≠ X3. Similarly, X2 ≠ X3 and X1 ≠ X2. The method used to show that (X1X2) ≠ (X2F) can be applied to show the sides are distinct, so that X1, X2, and X3 are indeed vertices of a triangle.
To get the second triangle, we note that there is a third point on l1 distinct from P and X1 [A2], call it “Y1”. To show that Y1, Y2, and Y3 are vertices of a triangle is exactly similar to the foregoing proof.
That these two triangles are the only triangles perspective from P is left as an exercise.
Corollary: If two triangles are perspective from a point, their vertices and the perspective center form a set of seven distinct points and their sides and the lines on the center form a set of nine distinct lines.
By the duality principle we know that the dual of “T11” is a theorem, namely, “Every line has exactly two triangles perspective from it”. The relation between the two types of perspectivity is given in the next theorem. We call it Desargues’ theorem because of its similarity to a theorem of that name in Euclidean geometry.
T12 (Desargues’ theorem): If two triangles are perspective from a point, they are perspective from a line.
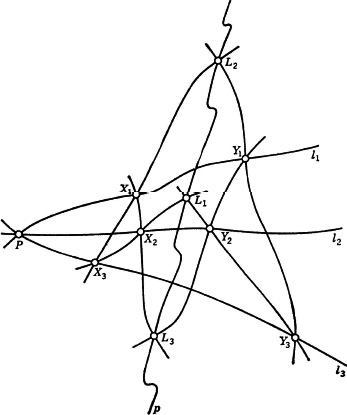
Proof: Consider two triangles (X1X2X3) and (Y1Y2Y3) perspective from a point P (Fig. 22).
FIG. 22.
Y3 is joined to P and Y1 on l1 [hyp]; hence, Y3 is not joined to X1 [indirectly from A5]. Similarly, Y3 is not joined to X2. From an instance of Lemma 2 it follows that
(Y3 not joined to X1)(Y3 not joined to X2) → (Y3 is the pole of (X1X2)),
therefore,

Or (X1X2) is the polar of Y3 [Lemma 1].
Similarly, (Y1Y2) is the polar of X3. Now,

where L3 is the pole of l3. So,

Similarly, it can be shown that L1 joins p, (X2X3), (Y2Y3) and L2 joins p, (X1X3), (Y1Y3). It follows that p joins L1, L2, L3 [D1].
That L1, L2, L3 are distinct is left as an exercise. It is now easily seen that the two triangles are perspective from p.
Corollary 1: The axis of the two perspective triangles is the polar of their center.
D5: The collection of points and lines consisting of the sides and vertices of two perspective triangles, together with their center and axis and the lines joined by the center, is called a Desargues configuration.
Corollary 2: The three lines on any point of a Desargues configuration are lines of the Desargues configuration.
The proof is left as an exercise. Observe that not every pair of triangles need be perspective from a point.
The finiteness of the geometry is proved in the following theorem, which is the last one that we shall prove here.
T13: There exist exactly 10 lines and 10 points.
Proof: The proof is made in terms of the notation of Fig. 22.
There exists a point, call it “P” [A1*]. P has exactly three lines on it, call them “l1”, “l2”, “l3” [A2*], and P has exactly two triangles perspective from it [T11], Denote the triangles by their vertices as “(X1X2X3)” and“(Y1Y2Y3)”.
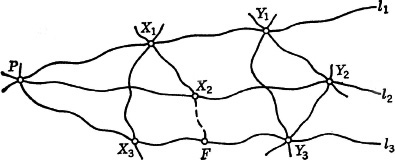
The two triangles are perspective from a line, say “p” [T12]. The lines and points so far proved to exist form a Desargues configuration [D5], That the points and lines of a Desargues configuration are, respectively, distinct follows from the corollary to “T11” and its dual. It is easy to see that the Desargues configuration contains 10 points and 10 lines. Let us show that there cannot be an eleventh point.
Assume Q is an eleventh point distinct from any point of the Desargues configuration so far constructed. Since every line of the configuration already has three points of the configuration on it [dual of Corollary 2, T12], Q is not on any line of the configuration [A2].
At least one of the 10 lines of the configuration is not the polar of Q [A4]; so Q is joined to a point on this line, call it “X”. X has three lines of the configuration on it [Corollary 2, T12], and since line (QX) is not one of them, X has four lines on it, which contradicts “A2*”. From the contradiction it follows that there is no eleventh point. By the duality principle, we then know that there is no eleventh line.
While there are more theorems of this miniature geometry, the theorems that we have proved provide a fairly complete description of the properties of the geometry. The proofs presented are, of course, not demonstrations and are still quite lengthy. They are lengthy because we have tried to be careful about proving distinctness of points and lines where this is needed rather than to leave these proofs tacit as is so common in plane geometry proofs. After it happened that we had a line 1 with points A and B on it, we concluded that there was another point on 1 distinct from A and B. This is supposed to follow from “A2”. We are dealing here with a little lemma, which may be stated
A ≠ B and A on 1 and B on 1 implies there exists C on 1, such that A ≠ C and B ≠ C.
A demonstration of this extremely obvious lemma is not at all short. In fact, before attempting a demonstration, we would find it necessary to restate the axioms in a more suitable form. For instance, “A2” would have to be restated in a form that spells out more precisely the meaning of the word “exactly” as follows:
For every line 1, there exist three points X, Y, Z, such that X is on 1, Y is on 1, Z is on 1, and X ≠ Y, Y ≠ Z, Z ≠ X, and for all points W, if W is on 1, then W = X or W = Y or W = Z.
We have not attempted demonstrations, indeed, we do not yet have the formal machinery to handle demonstrations depending upon such complex statements as the axioms of the miniature geometry. In the restated axiom, the quantifications “For every line 1 there exist three points X, Y, Z”, “for all points W” cannot be adequately handled by the methods of the statement calculus. They depend upon notions to be developed in a later section.
EXERCISES
1. Prove each of the statements that were left as exercises in Sec. 4.2.
a. Page 105: Proof of “B → A” of Lemma 1.
b. Page 115: Proof that the two triangles of “T11” are the only triangles perspective from P.
c. Page 117: Proof that L1, L2, L3 of “T12” are distinct.
d. Page 117: Proof of Corollary 2 of “T12”.
2. Prove, or disprove, the following conjectures about the miniature geometry:
a. Every triangle has a unique center. See “D4”.
b. If two triangles have no common vertex, then they have the same center.
c. Define lines to be parallel if they are not joined by a point. Then consider the conjecture: If P is not on 1, then there exists a line on P parallel to 1.
d. If P is not on 1, then there is not more than one line on P parallel to 1.
3. Define parallel points in such a way that in view of Exercise 2c “parallel” is a self-dual word.
4. Prove or disprove: If p || q, then for their poles, P || Q.
5. The following seven statements are the axioms for a miniature geometry with undefined words point and line and an undefined relation on.
F0: A point is on a line if and only if the line is on the point.
F1: There exists at least one line.
F2: On any two distinct points there exists at least one line.
F3: On any two distinct points there exists not more than one line.
F4: Every line has exactly three points on it.
F5: On any two lines there is at least one common point.
F6: Not all the points of the geometry are on a single line.
Find and prove some theorems of the geometry. The geometry has a finite number of points and a finite number of lines and has duality. An account of this geometry can be found in Veblen and Young.1 It is discussed also in a paper by H. F. MacNeish.2
1 Projective Geometry, vol. 1, chap. 1, Boston: Ginn and Company, 1918.
2 “Four Finite Geometries,” The American Mathematical Monthly, vol. 79, pp. 15–17, January, 1942.
In an abstract mathematical system, such as the miniature geometry, the statements of the axioms and the theorems are meaningless statements. They remain meaningless until interpreted within some other system, either abstract or real. The miniature geometry, for instance, can be interpreted in the system of arithmetic by means of additional statements, which we can call correlative definitions, that tell us what notions of arithmetic are to correspond to the primitive undefined notions of the geometry. We can say that by means of these correlative definitions, the previously undefined notions of the geometry are given meaning within arithmetic. With these meanings, the axioms of the geometry become statements of arithmetic, and as such are either true or false within arithmetic. If the axioms are all true statements of the arithmetic, then so will all the interpreted theorems of the geometry be true arithmetical statements; the resulting system of statements about arithmetic is called a valid interpretation of the geometry. Such a system is also called a model of the geometry. The word model is, however, often used in exactly the opposite sense. That is, the geometry may sometimes be called a model of what we have called the arithmetic interpretation.
As an example of an interpretation of the miniature geometry, consider the following correlative definitions:
With the meanings introduced by these correlative definitions, every statement of the geometry becomes a statement about certain numbers. There is, of course, no assurance that the interpreted statements are true statements about numbers. To show that the interpretation is valid, it is necessary to check all the interpretations of the axioms.
It is easy to see that axioms “A0”, “A1”, and “A2” are satisfied in the interpretation. The definitions “D1”, “D1*”, “D2”, “D2*” can be regarded as defining new words in terms of the interpreted words point and line and on. As an application of “D1*”, for instance, we would say that lines 047 and 038 are joined by 0.
From “D1” we know what a pole of a line is, but we do not know whether every (or any) line has a pole, or that each line has a unique pole. This must be checked in order to see if “A3” is a true statement in the interpretation.
Let us try to find a pole for the line 256. The points 2, 5, and 6 are immediately ruled out as possible poles by the definition. The existence of the line 578 rules out points 7 and 8 as poles for 256, since both 7 and 8 are joined to 5 on 256 by the line 578. In order to make the analysis more systematic we list in column A below some lines and in column B some points. The points in column B are points that cannot be poles of 256 because of the existence of the corresponding line in column A. We do not bother to list in column B points already eliminated.
Column B |
||
256 |
2, 5, 6 |
|
679 |
7, 9 |
|
289 |
8 |
|
123 |
1, 3 |
|
146 |
4 |
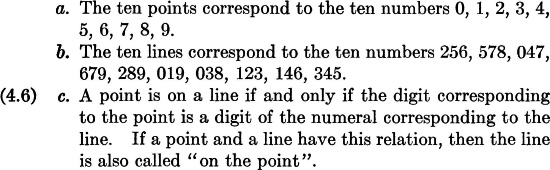
The only number not listed in column B is 0. To see that 0 is the pole of 256, we observe that the only lines on 0 are 047, 019, and 038, and none of these is on a point of 256. Clearly, we not only have found a pole of 256 but the pole of 256. In fact, the lines were listed in (4.6) in such a way that 0 is the pole of 256, 1 is the pole of 578, and so on. Once a unique pole for each line is found, we also have a unique polar for each point. It is easy, if tedious, to check that there is just one polar for each point.
Axiom “A5” is the most onerous to check. We shall check it in the case of point 1 and line 256, and assert without proof that it checks in all cases. Now, 1 is joined to 2 by 123. Also, 1 is joined to 6 by 146. For “A5” to be satisfied in this case, there must be no line joining 1 and 5, where 5 is the third point on 256. A check of the lines shows that there is no line joining 1 and 5. A complete check could be made similarly, but a little ingenuity can reduce much of the labor involved. We do not carry the matter further here but assert that all the axioms are true statements in the interpretation. Hence, the interpretation is valid.
It follows that all the theorems are true statements in the interpretation. From “T11”, “T12”, and their duals (pages 114 and 116), for example, every pole-polar pair should determine exactly two perspective triangles. To find the triangles determined by 0 and its polar 256, we first locate the three lines on 0, they are: 047, 019, and 038. If “Δ1” and “Δ2” denote the triangles we are looking for, then if 4 on 047 is a vertex of Δ1, 7 must be a vertex of Δ2. In the proof of “T12” it was shown that each side of Δ1 is a polar of a vertex of Δ2; so 123, which is the polar of 7, must be a side of Δ1. It follows that Δ1 has vertices 4, 1, and 3, leaving 7, 9, and 8 for the vertices of Δ2.
The interpreted lines and points have many other properties and relations besides those given by the axioms. For instance, the point 7 is a prime number, and the line 345 is divisible by the point 3, etc. The additional properties in no way affect the validity of the interpretation.
The given interpretation is abstract, since it is a subsystem of the abstract system of arithmetic. It would be easy to find other arithmetic interpretations different from the one given. In particular, we could interchange the words “point” and “line” in the first two correlative definitions (4.6), and with a suitable rewording of the third definition obtain an interpretation. From the duality principle it is clear that the new interpretation is a valid one.
Another interpretation could be made in which the ten points are ten individuals, and the ten lines are certain committees of three individuals each. “On” could be taken to mean “member of”.
More interesting is the following algebraic interpretation.
a. The ten points correspond to the following ordered pairs of integers:
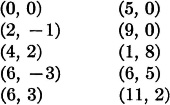
b. The ten lines correspond to the linear equations:
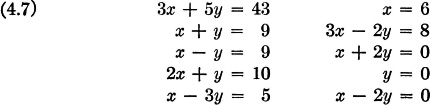
c. A point is on a line (and the line is on the point) if and only if the number pair corresponding to the point satisfies the linear equation corresponding to the line when the first number of the pair is substituted for x and the second for y.
Checking the validity of the interpretation is left as an exercise.
This interpretation is interesting, because it is well known from Descartes’ development of analytic geometry that ordered pairs of real numbers and linear equations in two variables can be interpreted in Euclidean geometry with linear equations corresponding to lines and the ordered pairs of real numbers corresponding to points. Then, “point on a line” corresponds to “coordinates of the point satisfy the equation of the line”. It follows that the Euclidean points and lines corresponding to the number pairs and linear equations given in (4.7) constitute a Euclidean interpretation of the miniature geometry. As a result, the figure obtained by graphing the equations and number pairs given in (4.7) in the usual way will be of great help in checking the algebraic interpretation given by (4.7). In fact, the streaks and dots of lead or ink on a sheet of paper can be taken as a physical interpretation of the geometry, if appropriate correlative definitions are given.
While it is not our purpose to discuss the scientific method at length in this book, yet the preoccupation with the formal side of mathematics, particularly in these last sections, may tend to give a false picture of mathematics in relation to the real world. We pause a moment to consider the empirical bases for mathematics.
Abstract mathematical systems are not created in a meaningless vacuum independently of an interpretation. It is invariably the case that abstract systems are created with some specific interpretation in mind, which guides the selection of axioms and undefined notions. This is not to say that the guiding interpretation is necessarily a real one, that is, a part of the real world. Yet mathematics has strong empirical roots.1 The Greek geometry got its start as an empirical science. The profound achievement of Euclidean geometry can be regarded as a step toward abstracting geometry from its empirical roots, but the presence of an interpretation is everywhere felt in the Euclidean formulation, and it cannot stand as a rigorously formulated abstract system independent of its interpretation. It is only in recent times that mathematicians have completed the process of abstraction to produce a rigorous system that can stand independently of an interpretation. Examples are the formulations for Euclidean geometry of Hilbert2 and Veblen.3 However rigorous these “de-empiricized” formulations, it is still true that empirical notions provided the inspiration for Euclid’s geometry, and hence for these new geometries, since they are just more careful formulations having an interpretation in common with Euclidean geometry. To quote Hilbert, “This problem [the problem of choosing axioms for geometry and investigating their relations] is tantamount to the logical analysis of our intuition of space”.4
The process of selecting axioms for a system that is to have a preconceived interpretation is inductive. If the interpretation is to be a part of the real world, generally some process of idealization of the real phenomena is necessary, that is, one does not try to deal with his total experience of the phenomena in question, but abstracts certain parts of the experience for consideration. An axiomatic system is sought that will have the idealized phenomena as an interpretation. When such a system is found, it can be examined critically from the point of view of its logical form quite independently of any interpretation. However, since it is the interpretation that is of prime importance, there remains the question of the adequacy of the interpretation as a body of statements about the real world, idealized or not. Criticism from this point of view depends upon careful observation and controlled experimentation.
Successful theoretical systems have tremendous value in systematizing our knowledge of nature and in predicting relationships not previously observed or considered in nature. Logically sound theoretical systems are successful to the extent that they systematize large areas of knowledge, and unsuccessful to the extent that their interpretations differ from a reasonable idealization of the real world. Even though the interpretation of the Newtonian physical theory is now known to differ significantly in places from the observable world, it must be considered a highly successful theory in view of the large area of knowledge it systematizes and its contribution to new knowledge. The new physics is more successful in that it systematizes more and has fewer points of difference between its interpretation and the real world. One can regard the Newtonian interpretation as an approximation to the real world and the new physical interpretation as a closer approximation. It should be noted that the better approximation is earned at the expense of a far more complex theory.
Let us return to the question of precedence, which comes first, the abstraction or the interpretation, the chicken or the egg? It is overwhelmingly the case that an abstract system is developed with some interpretation in mind, but the interpretations for mathematical systems are often themselves abstract. Sometimes the abstractions are so extreme that the empirical roots are hard to find. This is the case with the higher reaches of modern topology and modern algebra. However, in some other newer developments in mathematics, the empirical roots are quite evident, as in probability theory, information theory, and the theory of games.
EXERCISES
1. In the interpretation given by (4.6):
a. Find the two triangles perspective from 9 and 345.
b. Find the pole of 289 and show that “A3” is satisfied for this polepolar pair.
c. Find a line parallel to 289 (see Exercise 2c, page 119).
2. Write out the correlative definitions necessary to yield an interpretation of the miniature geometry in terms of people and committees, as suggested in the text, page 122.
3. Check the validity of the interpretation given by the correlative definitions in (4.7).
4a. Write out the necessary correlative definitions to yield an interpretation of the miniature geometry as a system of pencil streaks (drawn with a straightedge) and pencil dots.
b. Draw the interpretation for these correlative definitions, using the suggestions on page 122.
5. Find an interpretation of the miniature geometry in which points and lines are natural numbers, and where “point x is on line y” means “y ÷ x is a natural number”. (HINT: Exploit properties of prime numbers.)
1 University of Chicago, The Works of the Mind, Chicago: The University of Chicago Press, 1947. See S. Chandrasekhar, “The Scientist,” pp. 159–179, and John von Neumann, “The Mathematician,” pp. 180-196.
2 David Hilbert, The Foundations of Geometry, La Salle, Ill.: The Open Court Publishing Company, 1902.
3 Oswald Veblen, “A System of Axioms for Geometry,” Transactions of the American Mathematical Society, vol. 5, pp. 343–84, 1904.
4 Hilbert, op. cit., p. 1.