10.1 Smooth Worlds
Mathematicians have developed two methods of deriving the theorems of geometry: the analytic and the synthetic. While the analytical method is based on the introduction of numerical coordinates , and so on the theory of real numbers , the (much older) idea behind the synthetic approach is to furnish the subject of geometry with an autonomous foundation within which the theorems become deducible by logical means from an initial body of postulates.
The most familiar examples of the synthetic geometry are classical Euclidean geometry and the synthetic projective geometry introduced by Desargues in the seventeenth century and revived and developed by Poncelet , Steiner and others in the nineteenth century.
The power of analytic geometry derives very largely from the fact that it permits the methods of the calculus, and, more generally, of mathematical analysis, to be introduced into geometry, leading in particular to differential geometry. That being the case, the notion of a “synthetic” differential geometry appears elusive: how can differential geometry be placed on a “purely geometric” or “axiomatic” foundation when the apparatus of the calculus seems to be inextricably involved?
There have been (at least) two attempts to develop a synthetic differential geometry. The first was initiated by Herbert Busemann1 in the 1940s, building on earlier work of Paul Finsler. Here the idea was to build a differential geometry that, in its author’s words, “requires no derivatives”: the basic objects in Busemann’s approach are not differentiable manifolds, but metric spaces of a certain type in which the notion of a geodesic can be defined in an intrinsic manner.
The second approach, the focus of our attention here, was first proposed in the 1960s by F. W. Lawvere , in his pursuit of a decisive axiomatic framework for continuum mechanics. His ideas have led to the development of a theory now claiming, with good reason, exclusive title to the appellation synthetic differential geometry (SDG).
- 1.
It lacks exponentials: that is, the “space of all smooth maps ” from one manifold to another in general fails to be a manifold. And even if it did—
- 2.
It also lacks “infinitesimal objects”; in particular, there is no “infinitesimal” manifold2 Δ for which the tangent bundle Tan M of an arbitrary manifold M can be identified as the exponential “manifold” M Δ of all “infinitesimal paths” in M. 3
In enlarging Man to Space—in contradistinction to Set—no “new” maps between manifolds are introduced, that is, all maps in Space between objects of Man are smooth4 differentiable arbitrarily many times, It is for this reason that analysis in Space is called smooth infinitesimal analysis (SIA) .
Nevertheless, Space, like Set , is a topos. 5
But unlike Set, Space has infinitesimal objects. Let R be the smooth real line , that is, the real line considered as an object of Man , and hence also of Space. Then there is a nondegenerate infinitesimal segment Δ of R around 0 which is rigid, that is, remains straight and unbroken under any map in Space . In other words, Δ is subject in Space to Euclidean motions only. If we identify maps on R as curves, then the images of Δ can be considered as “infinitesimal straight segments” of curves.
SDG provides an image of the world in which the continuous is an autonomous notion, not explicable in terms of the discrete. In SDG all functions or correlations between spaces are smooth, and so in particular continuous. Accordingly SDG realizes in a very strong way Leibniz’s Principle of Continuity: natura non facit saltus.
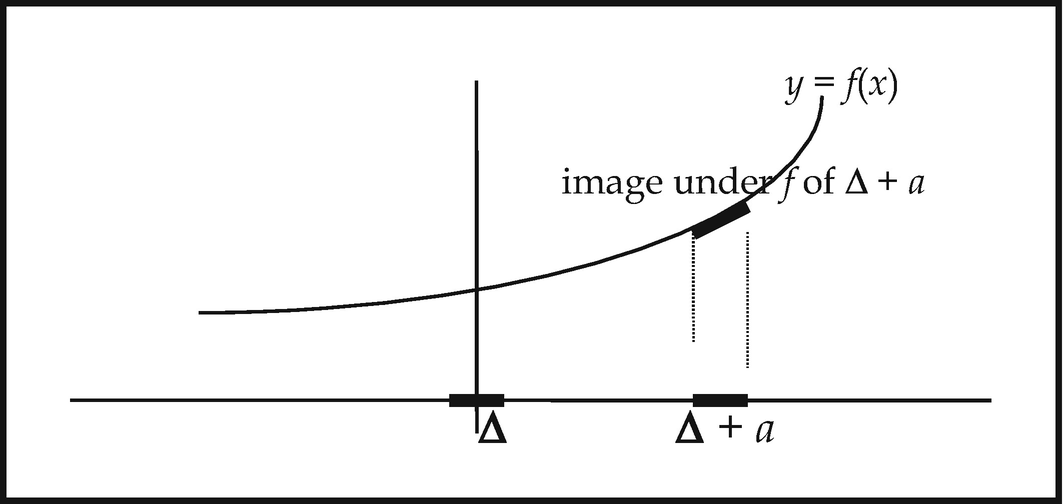
In SIA the rigidity of Δ is given precise formulation as the

This says that any real-valued function on Δ is affine. If we think of f as a graph in the Cartesian plane, the quantity a measures the displacement, and b the rotation undergone by Δ under the map f.

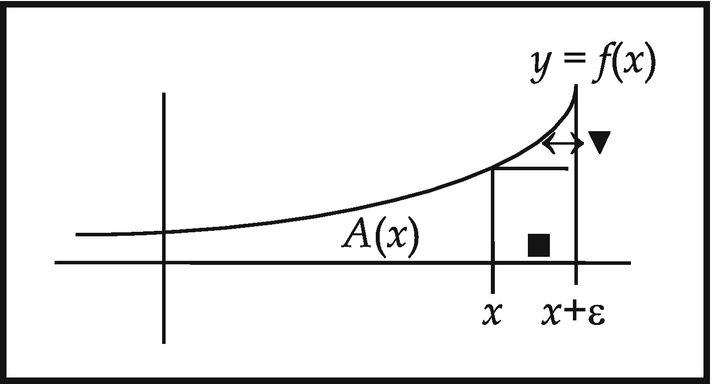
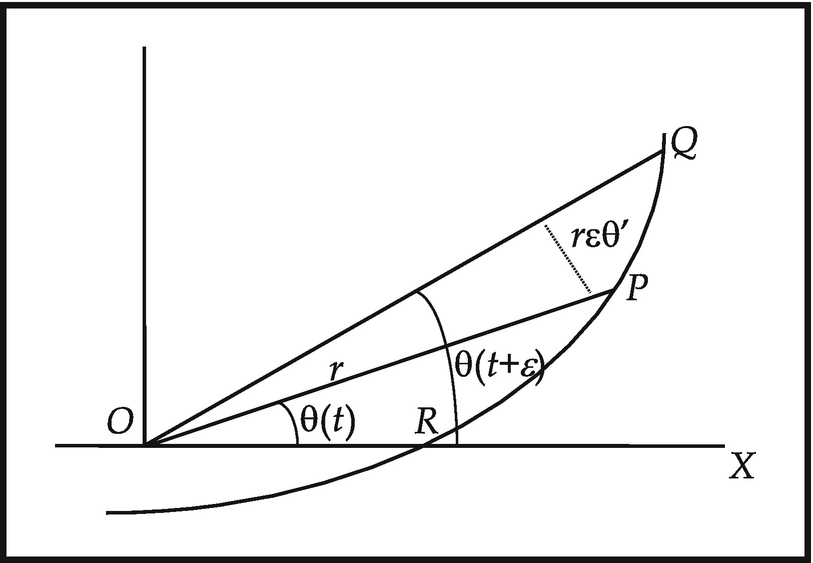
- As a generic infinitesimal tangent vector . For consider any curve C in a space S—that is, the image of a segment of R (containing Δ) under a map f into S (Fig. 10.1). Then the image of Δ under f may considered as a short straight line segment lying along C, that is, as part of the tangent to the curve at its contact point actually lying in the curve. Thus curves in S can be considered as infinitesimally straight, or microstraight. This is the Principle of Microstraightness in Space .
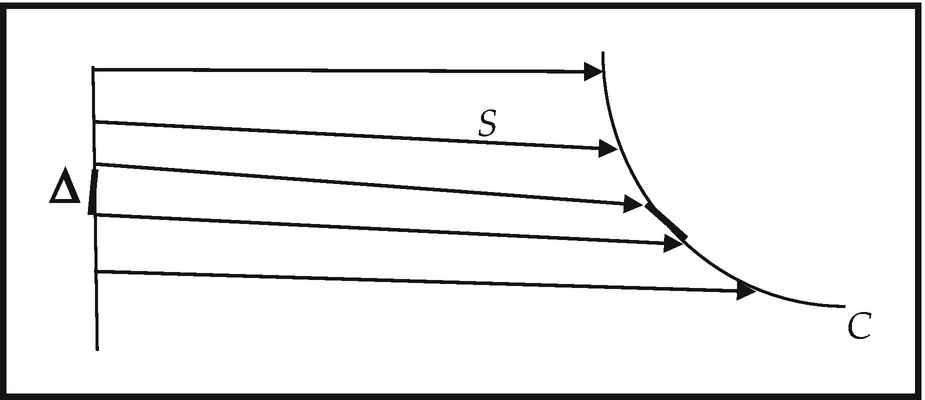 Fig. 10.1
Fig. 10.1Caption
As an intensive magnitude possessing only location and direction, and so which, considered (per impossibile) as an extension, cannot be “bent” or “broken”.
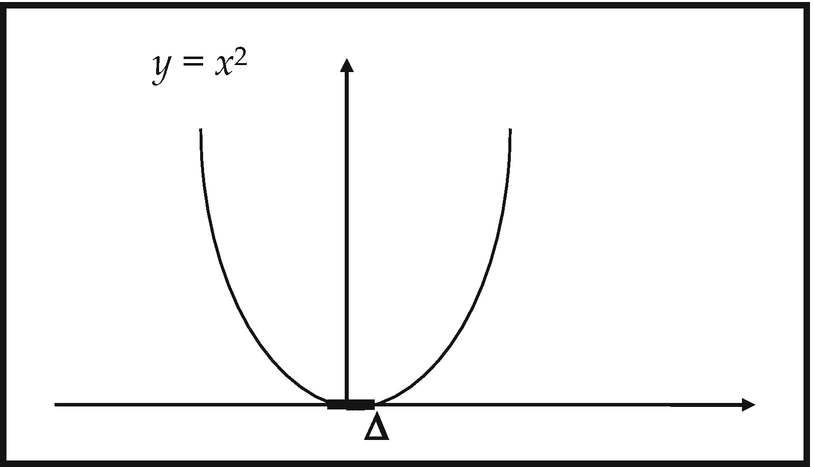
As a domain of nilsquare infinitesimals . For by considering the curve in R × R given by f(x) = x 2 , we see that Δ is the intersection of the curve y = x 2 with the x-axis7 (Fig. 10.2):
Accordingly
Caption

As an infinitesimal generator , or microgenerator of spaces . For consider the space Δ Δ of self-maps of Δ. It follows from the Microaffineness Axiom that the subspace (Δ Δ)0 of Δ Δ consisting of maps vanishing at 0 is isomorphic to R. 10 Accordingly R, and hence all Euclidean spaces, may be seen as being “generated” by the infinitesimal object Δ.
The space Δ Δ is a monoid11 under composition which may be regarded as acting on Δ by evaluation: for f ∈ Δ Δ, f ⋅ ε = f(ε). Its subspace (Δ Δ)0 is a submonoid naturally identified as the space of ratios of microquantities. The isomorphism between (Δ Δ)0 and R noted above is easily seen to be an isomorphism of monoids (where R is considered a monoid under its usual multiplication.) It follows that R itself may be regarded as the space of ratios of microquantities. This was essentially the view of Euler , who, as we have seen,12 regarded (real) numbers as representing the possible results of calculating the ratio 0/0. For this reason Lawvere has suggested that R be called the space of Euler reals. 13
As we have said, Δ may be viwed as an intensive magnitude of a certain kind. The microquantities that make up Δ may then be termed intensive quantities. If we think of R as the domain of extensive quantities, then an intensive quantity may be identified as an extensive microquantity , and (by the remarks in the paragraph above) an extensive quantity as the ratio of two intensive quantities.14
If we think of a smooth world as a model of the natural world, then the Principle of Microstraightness entails not just Leibniz’s Principle of Continuity—that natural processes occur continuously, but also the Principle of Microuniformity, namely, the assertion that any such process may be considered as taking place at a constant rate over any sufficiently small period of time- a Barrovian timelet. For example, if the process is the motion of a particle, the Principle of Microuniformity entails that over an extremely short period the particle undergoes no accelerations. This idea, although rarely explicitly stated, is freely employed in a heuristic capacity in classical mechanics and the theory of differential equations. The virtual equivalence between the Principles of Microuniformity and Microstraightness becomes manifest when natural processes—the motions of bodies, for example, are represented as curves correlating dependent and independent variables. For then, microuniformity of the process is represented by microstraightness of the associated curve.
The Principle of Microstarightness yields an intuitively satisfying account of motion. For it entails that infinitesimal parts of (the curve representing a) motion are not points at which, as Aristotle observed, no motion is detectable—or, indeed, even possible. Rather, infinitesimal parts of the motion are nondegenerate spatial segments just large enough for motion through each to be discernible. On this reckoning a state of motion is to be accorded an intrinsic status, and is not, as Russell claimed, merely to be identified with its result—the successive occupation of a series of distinct positions. Rather, a state of motion is represented by the smoothly varying straight microsegment, the infinitesimal tangent vector , of its associated curve. This straight microsegment may be thought of as an infinitesimal “rigid rod”, just long enough to have a slope—and so, like a speedometer needle, to indicate the presence of motion—but too short to bend, and so also too short to indicate a rate of change of motion.
This analysis may also be applied to the mathematical representation of time. Classically, time is represented as a succession of discrete instants, isolated “nows” at which time has, as it were, stopped. The Principle of Microstraightness , however, suggests that time be instead regarded as a plurality of smoothly overlapping Barrovian timelets each of which may be held to represent a “now” or “specious present” and over which time is, as it were, still passing. This conception of the nature of time is similar to that proposed by Aristotle to refute Zeno’s paradox of the arrow15; it is also closely related to Peirce’s ideas on time.16
10.2 Elementary Differential Geometry in a Smooth World
There is a very simple way of constructing the tangent bundle of a space in a smooth world. Let us start with the real line R. Intuitively, the tangent bundle Tan S of a space S is the assemblage of infinitesimally short straight paths in S. In a smooth world such a path may be taken to be a map from the generic tangent vector Δ to S. accordingly the tangent bundle S should be identified with the exponential S Δ.

Elements of S Δ are called tangent vectors to S. Thus a tangent vector to S at a point p ∈ S is just a map t: Δ → S with t(0) = p. That is, a tangent vector at p is a micropath in S with base point p. The base point map π: TS → S is defined by π(t) = t(0). For p ∈ S, the fibre π−1(p) = Tan p S is the tangent space to S at p.
Observe that, if we identify each tangent vector with its image in S, then each tangent space to S may be regarded as lying in S. In this sense each smooth space is “infinitesimally flat”.
The assignment S ↦ Tan S = S Δ can be turned into a functor in the natural way—the tangent bundle functor . (For f: S → T, Tan f: Tan S → Tan T is defined by (Tan f)t = f ° t for t ∈ Tan S.)
Synthetic differential geometry turns on the fact that the tangent bundle functor is rendered representable: Tan S is “represented” as the space of all maps from some fixed object—in this case Δ)—to S. (Classically, this is impossible.) This in turn simplifies a number of fundamental definitions in differential geometry.
For instance, a vector field on a smooth space S is an assignment of a tangent vector to S at each point in it, that is, a map ξ: S → Tan S = S Δ such that ξ(x)(0) = x for all x ∈ S. This means that π ° ξ is the identity on S, so that a vector field is a section of the base point map .







Accordingly, in Space , or SDG, vector fields , microflows , and micropaths are equivalent. 17 Classically, this is a metaphor at best.

Maps
S
Δ → R are differential forms on S, so the existence of this right adjoint allows differential forms to be represented as maps  with values in the bigger algebraic structure
with values in the bigger algebraic structure  . This feature has led Lawvere
to call
Δ an “a.t.o.m.”: an “amazingly tiny object model”. Classically, the only objects having this feature are singletons.
. This feature has led Lawvere
to call
Δ an “a.t.o.m.”: an “amazingly tiny object model”. Classically, the only objects having this feature are singletons.
10.3 The Calculus in Smooth Infinitesimal Analysis






Caption
From the Microaffiness Axiom we deduce the.
Principle of Microcancellation If εa = εb for all ε, then a = b.
For the premise asserts that the graph of the function g: Δ → R defined by g (ε) = aε has both slope a and slope b: the uniqueness condition in the Microaffineness Axiom then gives a = b. The Principle of Microcancellation supplies the exact sense in which there are “enough” infinitesimals in SIA .

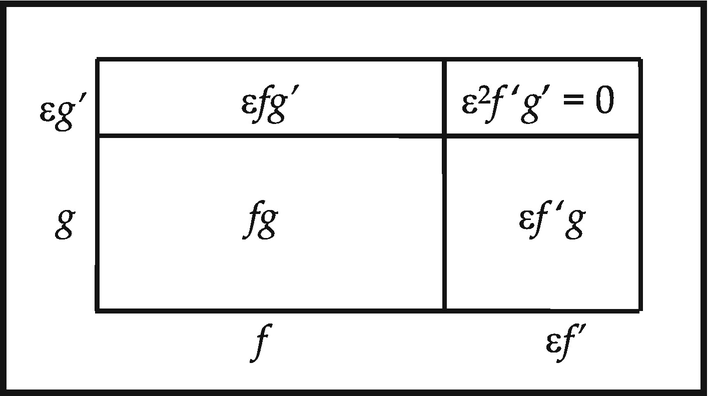
Since Eq. (10.3) holds for any f, it also holds for its derivative f ′; it follows that functions in smooth infinitesimal analysis are differentiable arbitrarily many times, thereby justifying the use of the term “smooth”.

![$$ {\displaystyle \begin{array}{lll}(fg)\left(x+\upvarepsilon \right)& =& (fg)(x)+\upvarepsilon {(fg)}^{\prime }(x)=f(x)g(x)+\upvarepsilon {(fg)}^{\prime }(x),\\ {}(fg)\left(x+\upvarepsilon \right)& =& f\left(x+\upvarepsilon \right)g\left(x+\upvarepsilon \right)=\left[f(x)+\upvarepsilon {f}^{\prime }(x)\right]\cdot \left[g(x)+\upvarepsilon\ {g}^{\prime }(x)\right]\\ {}& =& f(x)g(x)+\varepsilon \left({f}^{\prime }g+{fg}^{\hbox{'}}\right)+{\upvarepsilon}^2{f}^{\prime }{g}^{\prime}\\ {}& =& f(x)g(x)+\upvarepsilon \left({f}^{\prime }g+f{g}^{\prime}\right),\end{array}} $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equq.png)
Caption
Caption
Let J be a closed interval {x: a ≤ x ≤ b} in R and f: J → R; let A(x) be the area under the curve y = f(x) as indicated above. Then, using Eq. (10.3),


Following Fermat ,21 in SIA a stationary point a in R of a function f: R → R is defined to be a point in whose vicinity microvariations fail to change the value of f, that is, for which f(a + ε) = f(a) for all ε. This means that f(a) + εf ′(a) = f(a), so that εf ′(a) = 0 for all ε, from which it follows by microcancellation that f ′(a) = 0. So a stationary point of a function is precisely a point at which the derivative of the function vanishes.
In classical analysis, if the derivative of a function is identically zero, the function is constant. This fact is the source of the following postulate concerning stationary points adopted in SIA:
Constancy Principle . If every point in an interval J is a stationary point of f: J → R (that is, if f ′ is identically 0), then f is constant.
It follows from the Constancy Principle that two functions with identical derivatives differ by at most a constant. Thus if we define an antiderivative of a function f: J → R to be a function g: J → R such that g′ = f, then any function with an antiderivative has a unique antiderivative. This observation, combined with the Principles of Microstraightness and Microcancellation , yields simple derivations of basic equations of mathematics and physics.22 We illustrate the method by deriving the equation of a tractrix.
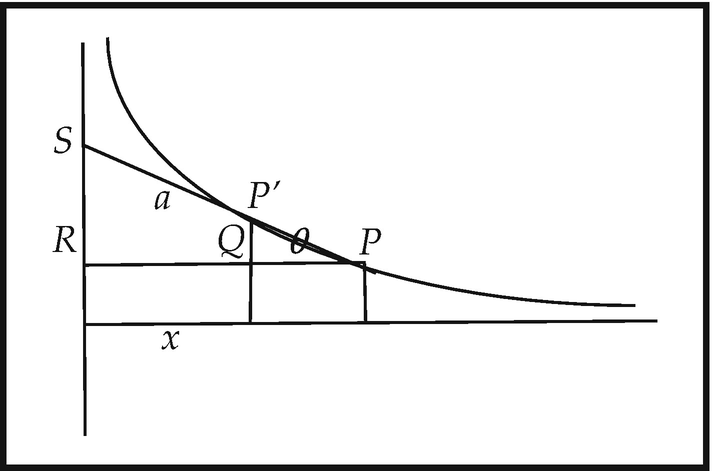
The tractrix has the property that the length of the tangent to the curve from an arbitrary point on it to the y-axis is constant. It is the curve traced out by an object dragged, under the influence of friction, by a string attached to a pulling point that moves at a right angle to the initial line between the object and the puller.




![$$ y=a\;\log \left[\left(a+{\left({a}^2\hbox{--} {x}^2\right)}^{\frac{1}{2}}\right)/x\right)\Big]-{\left({a}^2\hbox{--} {x}^2\right)}^{\frac{1}{2}} $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equv.png)
Caption
This sort of argument is typical in SIA . The pattern is this. Suppose we want to determine the explicit form of a function f(x). We subject x to a microvariation by adding an infiniresimal ε, and consider the “increment” in f, δf = f(x + ε) – f(x) = εf ′(x). Then we use geometric or other methods “in the small” (i.e. employing microstraightness and the nilsquare propery of ε) to present δf in the form εg(x), where g(x) is an explicit function with explicit antiderivative h. Since εf ′(x) = εg(x), microcancellation gives f ′(x) = g(x). Accordingly f is also an antiderivative of g, and so must be identical with h. This latter function is the explicit form of f.
Put succinctly, the Constancy Principle asserts that “universal infinitesmal (or “local”) constancy implies global constancy”, or “infinitesimal behaviour determines global behaviour” The Constancy Principle brings into sharp focus the difference in SIA between points and infinitesimals. For if in the Constancy Principle one replaces “infinitesimal constancy” by “constancy at a point” the the resulting “Principle” is false because any function whatsoever is constant at every point. But since in SIA all functions on R are microaffine and hence smooth, the Constancy Principle embodies the idea that for such functions local constancy is sufficient for global constancy, that a nonconstant smooth function must be somewhere nonconstant over arbitrarily small intervals.
In a smooth world the Constancy Principle reconnects the infinitesimal and the extended. Behaviour “in the large” is completely determined by behaviour “in the infinitely small”.[In its struggle with the infinitely small] the limiting process was victorious. For the limit is an indispensable concept, whose importance is not affected by the acceptance or rejection of the infinitely small. But once the limit concept has been grasped, it is seen to render the infinitely small superfluous. Infinitesimal analysis proposes to draw conclusions by integration from the behavior in the infinitely small, which is governed by elementary laws, to the behavior in the large; for instance, from the universal law of attraction for two material “volume elements” to the magnitude of attraction between two arbitrarily shaped bodies with homogeneous or non-homogeneous mass distribution. If the infinitely small is not interpreted ‘potentially’ here, in the sense of the limiting process, then the one has nothing to do with the other, the process in infinitesimal and finite dimensions become independent of each other, the tie which binds them together is cut. 23
10.4 The Internal Logic of a Smooth World Is Intuitionistic



For simplicity we sgall refer to the refutability of the assertion (∗) as the refutability of the law of excluded middle in SIA .
The Principle of Continuity also implies that propositional functions, or predicates, cannot be taken as being merely “bipolar” in Wittgenstein’s sense, that is, representable in terms of assuming just two “truth values” within the set 2 = {true, false} = {1, 0}. For let Ω be the domain of truth values in a world in which the Principle holds. Then, as usual, for any object X, parts of X correspond to predicates on X, that is “propositional functions” on X, in other words maps X → Ω. Now if X is a (connected) continuum, it presumably does have proper nonempty parts. But there are only two continuous maps X → 2, namely the constant ones corresponding to the whole of X and the empty part of X, because a nonconstant continuous such map on X would yield a “splitting” of X into two nontrivial disconnected pieces. Thus: X has more than two parts; these correspond to maps X → Ω., so there are more than two of these; but there are just two maps X → 2; whence Ω ≠ 2.
Now if we are to accept the common idea of continuity...we must either say that a continuous line contains no points...or that the law of excluded middle does not hold of these points. The principle of excluded middle applies only to an individual...but places being mere possibilities without actual existence are not individuals.

The “internal” logic of SIA is accordingly not full classical logic. It is, instead, intuitionistic logic , that is, the logic derived from the constructive interpretation of mathematical assertions.27 This “change of logic” is not noticed in the development of basic calculus because there arguments are in the main constructive, proceeding by direct computation.
(AC) for any family
 of inhabited28 sets, there is a choice function on , that is, a function f: →∪ for which f(X) ∈ X whenever X ∈ .
of inhabited28 sets, there is a choice function on , that is, a function f: →∪ for which f(X) ∈ X whenever X ∈ .

![$$ \left[a=0\vee p\right]\wedge \left[b=1\vee p\right]. $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equz.png)
![$$ \left[a=0\wedge b=1\right]\vee p, $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equaa.png)



Thus the law of excluded middle is derivable from this special case of the Axiom of Choice . Since the law of excluded middle is refutable in SIA , so equally, then, is AC.
The refutability of the Axiom of Choice in SIA, and hence its incompatibility with the Principle of Continuity which prevails in smooth worlds, is not surprising in view of the Axiom’swell-known “paradoxical” consequences. One of these is the famous Banach-Tarski paradox 29 which asserts that any solid sphere can be decomposed into finitely many pieces which can themselves be reassembled to form two solid spheres each of the same size as the original, or into one solid sphere of any preassigned size. Paradoxical decompositions such as these become possible only when continuous geometric objects are, in Dedekind ’s words,30 “dissolved to atoms ... [through a] frightful, dizzying discontinuity” into discrete sets of points which the axiom of choice then allows to be rearranged in an arbitrary (discontinuous) manner. Such procedures are inadmissible in smooth worlds.

10.5 Smooth Infinitesimal Analysis as an Axiomatic Theory. Consequences for the Continuum
SIA can be axiomatized as a theory formulated within higher-order intuitionistic logic . Here are the basic axioms of the theory.32
Axioms for the continuum, or smooth real line R. These include the usual axioms for a commutative ring with unit expressed in terms of two operations + and ., (we usually write xy for x . y) and two distinguished elements 0 ≠ 1.33 In addition we stipulate that R is an intuitionistic field, i.e., satisfies the following axiom:

O1. a < b and b < c implies a < c.
O2. ¬(a < a).
O3. a < b implies a + c < b + c for any c.
O4. a < b and 0 < c implies ac < bc.
O5. either 0 < a or a < 1.
O6. a ≠ b implies a < b or b < a. 34
O7. 0 < x implies ∃y (x = y 2).
- 1.
N is a cofinal or Archimedean subset of R, i.e. N ⊆ R and ∀x ∈ R ∃n ∈ N x < n.
- 2.
Peano axioms:

- 3.
Restricted Induction scheme. For every formula φ(x) involving just =,∧, ∨, T, ⊥, ∃35
![$$ \upvarphi (0)\kern0.75em \forall x\in \mathbf{N}\left[\upvarphi (x)\to \upvarphi \left(x+1\right)\right]\to \forall x\in N\upvarphi (x). $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equag.png)
N has decidable equality, i.e. ∀x ∈ ∀ y ∈ N(x = y ∨ x ≠ y)
N is linearly ordered, i.e. ∀x ∈ N ∀ y ∈ N(x < y ∨ x = y ∨ y < x).
N satisfies decidable induction: for any formula φ(x),
![$$ \forall x\in \mathbf{N}\left(\upvarphi (x)\vee \neg \upvarphi (x)\right)\to \left[\right[\upvarphi (0)\wedge \forall x\in \mathbf{N}\left(\upvarphi (x)\to \upvarphi \left(x+1\right)\right]\to \forall x\upvarphi (x)\Big]. $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equah.png)
The relation ≤ on R is defined by a ≤ b ⇔ ¬b < a. The open interval (a, b) and closed interval [a, b] are defined as usual, viz. (a, b) = {x: a < x < b} and [a, b] = {x: a ≤ x ≤ b}; similarly for half-open, half-closed, and unbounded intervals.
We have written Δ for the subset {x: x 2 = 0} of R consisting of (nilsquare) infinitesimals or microquantities. As before, we use the letter ε as a variable ranging over Δ. Δ is subject to the.

Constancy Principle . If A ⊆ R is any closed interval on R, or R itself, and f: A → R satisfies f(a + ε) = f(a) for all a ∈ A and ε ∈ Δ, then f is constant.
It follows easily from the Microaffineness Axiom that Δ is nondegenerate, i.e. Δ ≠ {0}.36 For if Δ = {0}, then the identity map i: Δ → Δ can be represented as i(ε) = bε for any b, in violation of the uniqueness condition on b.



Except for the presence of intuitionistic logic , we note that the algebraic structure on R in SIA differs little from the classical situation. In SIA, R is equipped with the usual addition and multiplication operations under which it is a field. In particular, R satisfies the condition that each x ≠ 0 has a multiplicative inverse. Notice, however, that since in SIA no microquantity (apart from 0 itself) is provably ≠ 0, microquantities are not required to have multiplicative inverses (a requirement which would lead to inconsistency). From a strictly algebraic standpoint, R in SIA differs from its classical counterpart only in being required to satisfy the Principle of Microcancellation .






In CA the object Δ is degenerate while the nondegeneracy of Δ in SIA is one of its characteristic features.
Axiom O6 of SIA, together with the transitivity and irreflexivity of <, implies that < is stable . This may be seen as follows. Suppose ¬¬a < b. Then certainly a ≠ b, since a = b → ¬a < b by irreflexivity. Therefore a < b or b < a. The second disjunct together with ¬¬a < b and transitivity gives ¬¬a < a, which contradicts ¬a < a. Accordingly we are left with a < b. Hence < is stable . But the stability of < cannot be deduced in CA .38
10.6 Cohesiveness of the Continuum and Its Subsets in SIA
In oclassical analysis the continuum and its closed intervals are connected in the sense that they cannot be split into two nonempty subsets neither of which contains a limit point of the other. In SIA the Constancy Principle ensures that these have the vastly stronger property of cohesiveness, 39 that is, they cannot be split into two disjoint nonempty subsets in any way whatsoever. This is clearly equivalent to saying that any map A → {0, 1} is constant.

- (i)
f(x) = 0 & f(x + ε) = 0
- (ii)
f(x) = 0 & f(x + ε) = 1
- (iii)
f(x) = 1 & f(x + ε) = 0
- (iv)
f(x) = 1 & f(x + ε) = 1
From the cohesiveness of closed intervals it can be inferred40 that in SIA all intervals in R are cohesive.

The set Q of (smooth) rational numbers is defined as usual to be the set of all fractions of the form m/n with m, n ∈ N , n ≠ 0. The fact that N is cofinal in R ensures that Q is dense in R .
![$$ \mathbf{R}\hbox{--} \mathbf{Q}=\left[\left\{x:x>0\right\}\hbox{--} \mathbf{Q}\right]\cup \left[\left\{x:x<0\right\}\hbox{--} \mathbf{Q}\right\}. $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equas.png)
Caption


An argument similar to that establishing the cohesiveness of Δ does the same for each Δ k. Thus let f: Δ k → {0, 1}; Micropolynomiality implies the existence of a, b 1, ..., b k ∈ R such that f(δ) = a + ζ(δ), where ζ(δ) = b 1δ + b 2δ2 + ... + b kδk. Notice that ζ(δ) ∈ Δ k, that is, ζ(δ) is nilpotent. Now a = f(0) = 0 or 1; if a = 0 then ζ(δ) = f(δ) = 0 or 1, but since ζ(δ) is nilpotent it cannot =1. Accordingly in this case f(δ) = 0 for all δ ∈ Δ k. If on the other hand a = 1, then 1 + ζ(δ) = f(δ) = 0 or 1, but 1 + ζ(δ) = 0 would imply ζ(δ) = −1 which is again impossible. Accordingly f is constant and Δ cohesive.
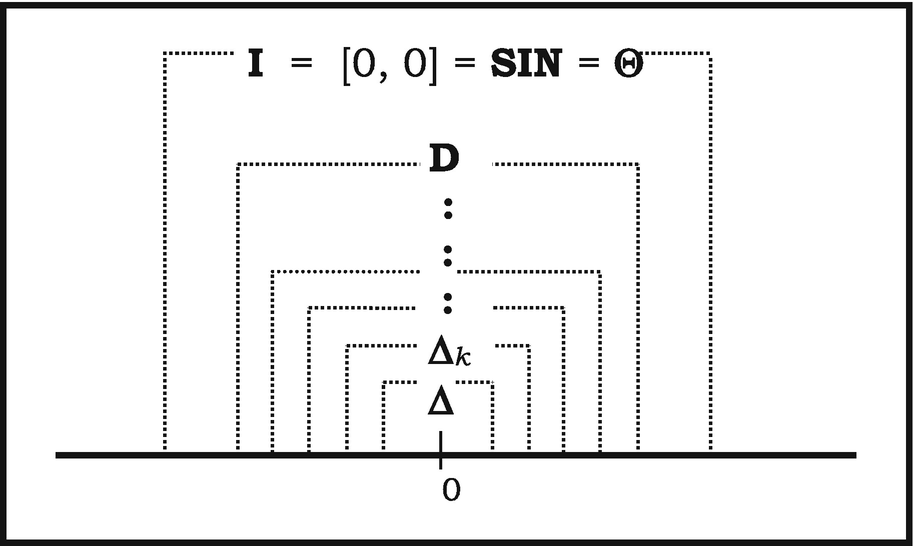
The union D of all the Δ k is the set of nilpotent infinitesimals , another infinitesimal neighbourhood of 0. The cohesiveness of D follows readily from that of each Δ k.
The next infinitesimal neighbourhood of 0 is [0, 0], which, as a closed interval, is cohesive. It is easily shown that [0, 0] includes D, so that it does not coincide with {0}.


![$$ \mathbf{R}-\left\{0\right\}\subset \left(\mathbf{R}-\left\{0\right\}\right)\cup \left\{0\right\}\subset \left(\mathbf{R}-\left\{0\right\}\right)\cup {\varDelta}_1\subset \left(\mathbf{R}-\left\{0\right\}\right)\cup {\varDelta}_2\subset \dots \left(\mathbf{R}-\left\{0\right\}\right)\cup \mathbf{D}\subset \left(\mathbf{R}-\left\{0\right\}\right)\cup \left[0,0\right]. $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equax.png)
10.7 Comparing the Smooth and Dedekind Real Lines in SIA
 Q ×
Q
44 satisfying the conditions:
Q ×
Q
44 satisfying the conditions:








![$$ \forall x\left(x\ne 0\to x\ is\ invertible\right)\kern1.00em \forall x\forall y\left[ xy=0\to x=0\vee y=0\right]. $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equbh.png)
In any model of SIA the usual open interval topology can be defined on R d. It can be shown47 that with this topology R d is always connected in the sense that it cannot be partitioned into two disjoint inhabited open subsets. In SIA R d actually inherits a stronger cohesiveness property from R. To see this, call a subset X of a set A detachable 48 if there is a subset Y of A such that X ∩ Y = ∅, X ∪ Y = A. Now we can show that, if X is a detachable subset of R d, then φ [R] ⊆ X or X ∩ φ[R] = ∅ . For suppose X ⊆ R d detachable and define f: R d → 2 by f(x) = 1 if x ∈ X, f(x) = 0 if x ∉ X. Then f ° φ: R → 2 must be constant since R is cohesive. If f ° φ is constantly 1, then φ[R] ⊆ X; if constantly 0, then A ∩ φ[R] = ∅. It follows easily that if φ is surjective then R d is itself cohesive.
10.8 Nonstandard Analysis in SIA
In certain models of SIA the system of natural numbers possesses some intriguing features which make it possible to introduce another type of infinitesimal—the so-called invertible infinitesimals —resembling those of nonstandard analysis , whose presence engenders yet another infinitesimal neighbourhood of 0 properly containing all those introduced above.
We recall that the set N of smooth natural numbers is required to satisfy not the full principle of mathematical induction for arbitrary properties but only the weaker restricted induction scheme. This raises the possibility that N may not coincide with the set ℕ of standard natural numbers, which is defined to be the smallest subset of R containing 0 and closed under the operation of adding 1. Now, models of SIA have been constructed49 in which ℕ is a proper subset of N; accordingly the members of N – ℕ may be considered nonstandard integers. Multiplicative inverses of nonstandard integers are infinitesimals, but, being themselves invertible, they are of a different type from the (necessarily noninvertible) nilpotent infinitesimals which are basic to SIA.
![$$ \mathrm{\mathbb{N}}=\left\{n\in \mathbf{N}:\forall X\subseteq \mathbf{N}\left[0\in X\wedge \forall m\left(m\in X\to m+1\in X\right)\to n\in X\right]\right\} $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equbi.png)
![$$ \forall X\subseteq \mathbf{N}\left[0\in X\wedge \forall m\left(m\in X\to m+1\in X\right)\to X=\mathbf{N}\right]. $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equbj.png)


![$$ \forall x\forall y\left[x\in \Theta \wedge y\in \mathrm{I}\ y>0\to x<y\right]. $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equbm.png)

![$$ \forall n\in \mathbf{N}\left[\forall x\in \mathbf{N}\hbox{--} \mathrm{\mathbb{N}}\left(x>n\right)\to n\in \mathrm{\mathbb{N}}\right], $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equbo.png)
In the presence of invertible infinitesimals R d is a nonstandard model of the reals lacking nilpotent elements. The passage via φ from R to R d eliminates the nilpotent elements but preserves invertible infinitesimals. When φ is onto, R d is a cohesive nonstandard model of the reals.


We observe that R fin can only be a detachable subset of R d when N = ℕ, or equivalently, when R acc and R coincide, or to put it another way, when no invertible infinitesimals are present. For if R fin is detachable in R d, then, as above, either φ[R] ⊆ R fin, or R fin ∩ φ[R] = ∅. The latter being obviously false, it follows that φ[R] ⊆ R fin. But then φ[N] ⊆ R fin ∩ φ[N] = φ[ℕ], whence N = ℕ.
10.9 Contrasting Nonstandard Analysis with Smooth Infinitesimal Analysis
In models of SIA , only smooth maps between objects are present. In models of NSA, all set-theoretically definable maps (including, in particular, discontinuous ones) appear.
The logic of SIA is intuitionistic, making possible the nondegeneracy of the infinitesimal neigbourhoods Δ, D and SIN. The logic of NSA is classical,53 causing all these neighbourhoods to collaose to {0}.
In SIA , all curves are microstraight, and closed curves infinilateral polygons . Nothing resembling this is present in NSA.
The nilpotency of the infinitesimals of SIA reduces the differential calculus to simple algebra. In NSA the use of infinitesimals is a disguised form of the classical limit method.
The hyperreal line in NSA is obtained by augmenting the classical real line with infinitesimals (and infinite numbers), while the smooth real line R comes already equipped with infinitesimals.
In any model of NSA, the hyperreal line ℝ★ has exactly the same set-theoretically expressible properties as does the classical real line: in particular ℝ★ is an archimedean field in the sense of that model. This means that the infinitesimals (and infinite numbers) of NSA are not intrinsically so in the sense of the model in which they “live”, but only relative to the “standard” model with which the construction began. That is, speaking figuratively, an inhabitant of a model of NSA would be unable to detect the presence of infinitesimals or infinite numbers in ℝ★. This contrasts with SIA in two respects. First, in models of SIA containing invertible infinitesimals , the real line is nonarchimedean with respect to the set of standard natural numbers, which is itself an object of the model. In other words, the presence of (invertible) infinitesimals and infinite numbers would be perfectly detectable by an inhabitant of the model. And secondly, the characteristic property of nilpotency possessed by the microquantities of a model of SIA is an intrinsic property, perfectly identifiable within the model. In NSA the hyperreals have precisely the same algebraic properties as do the classical real numbers , but the smooth reals in SIA do not.
The differences between NSA and SIA arise because the former is essentially a theory of infinitesimal numbers designed to provide a succinct formulation of the limit concept, while the latter is, by contrast, a theory of infinitesimal geometric objects, designed to provide an intrinsic formulation of the concept of differentiability.
10.10 Smooth Infinitesimal Analysis and Physics
In the past physicists showed no hesitation in employing infinitesimal methods,54 the use of which in turn relied on the implicit assumption that the (physical) world is smooth, or at least that the maps encountered there are differentiable as many times as needed. For this reason smooth infinitesimal analysis provides an ideal framework for the rigorous derivation of results in classical physics.55 We present two here.
First, we derive the equation of continuity for fluids, whose original derivation by Euler was outlined in Chap. 3. The derivation in SIA will follow Euler’s very closely, but the use of nilsquare infinitesimals and the Microcancellation Axiom will render the argument entirely rigorous.
 is defined as usual to be the derivative of the function f (a
1, ..., x
i, ..., a
n) obtained by fixing the values of all the variables apart
from x
i. In that case, for an arbitrary microquantity
ε, we have
is defined as usual to be the derivative of the function f (a
1, ..., x
i, ..., a
n) obtained by fixing the values of all the variables apart
from x
i. In that case, for an arbitrary microquantity
ε, we have

These equations are pivotal in deriving the equation of continuity. Here we are given a inviscid fluid of varying density flowing smoothly in space . At any point O = (x, y, z) in the fluid and at any time t, the fluid’s density ρ and the components u, v, w of the fluid’s velocity are given as functions of x, y, z, t. Following Euler , we consider the elementary volume element E —a microparallelepiped—with origin O and edges OA, OB, BC of microlengths ε, η, ζ and so of mass εηζρ:

 so that the length of O’A’ is
so that the length of O’A’ is  Similarly, the lengths of O′B′ and O′C′ are, respectively,
Similarly, the lengths of O′B′ and O′C′ are, respectively,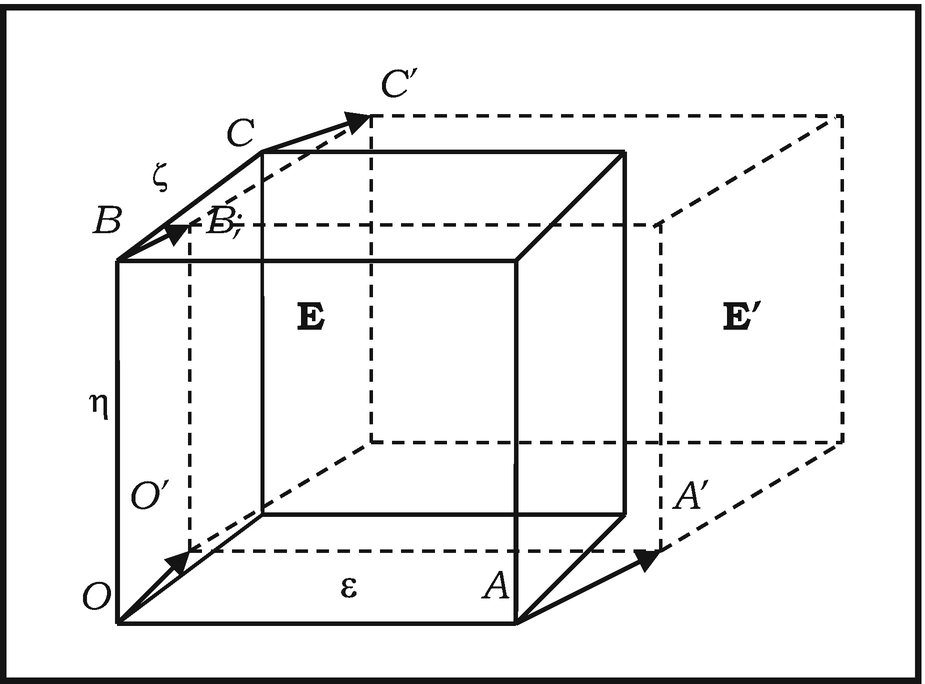
Caption

![$$ \upvarepsilon \upeta \upzeta \left[1+\uptau \left(\frac{\partial u}{\partial x}+\frac{\partial v}{\partial y}+\frac{\partial w}{\partial z}\right)\right]. $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equ15.png)






Caption
![$$ r\ \sin \left[\uptheta \left(t+\upvarepsilon \right)-\uptheta (t)\right]=r\ \sin\ \upvarepsilon {\uptheta}^{\prime }=r\upvarepsilon {\uptheta}^{\prime }{.}^{56} $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equbx.png)







Finally, from x = r cosθ, y = r sinθ, it follows in the usual way that



Here is an appropriate place to remark on an intriguing use of infinitesimals in Einstein’s celebrated 1905 paper On the Electrodynamics of Moving Bodies, 56 in which the special theory of relativity is first formulated. In deriving the Lorentz transformations from the principle of the constancy of the velocity of light Einstein obtains the following equation for the time coordinate τ(x’, y, z, t) of a moving frame57:
![$$ \frac{1}{2}\left[\uptau \left(0,0,0,t\right)+\uptau \left(0,0,0,t+\frac{x^{\prime }}{c-v}+\frac{x^{\prime }}{c+v}\right)\right]=\uptau \left({x}^{\prime },0,0,t+\frac{x^{\prime }}{c-v}\right). $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equ20.png)


Now the derivation of Equation ( 10.11 ) from equation ( 10.10 ) can be simply and rigorously carried out in SIA by choosing x′ to be a microquantity ε. For then ( 10.10 ) becomes
![$$ \frac{1}{2}\left[\uptau \left(0,0,0,t\right)+\uptau \left(0,0,0,t+\upvarepsilon \left(\frac{1}{c-v}+\frac{1}{c+v}\right)\right)\right]=\uptau \left(\upvarepsilon, 0,0,t+\frac{\upvarepsilon}{c-v}\right). $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equch.png)






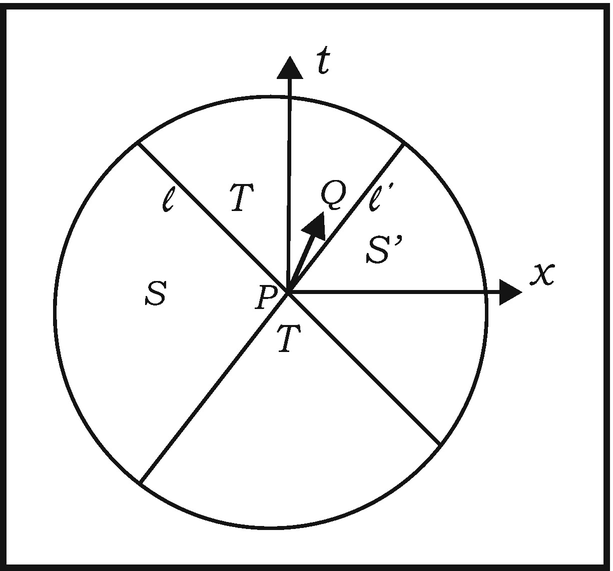
This tells us that the “infinitesimal distance
” ds between a point P with coordinates
(x
1, x
2, x
3, x
4) and an infinitesimally near point Q with coordinate (x
1 + k
1ε, x
2 + k
2ε, x
3 + k
3ε, x
4 + k
4ε) is  . Here a curious situation arises. For when the “infinitesimal interval” ds between P and Q is timelike (or lightlike), the quantity
Σg
μv
k
μ
k
vis nonnegative, so that its square root is a real number
. In this case ds may be written as εd, where d is a real number. On the other hand, if ds is spacelike, then Σg
μv
k
μ
k
vis negative, so that its square root is imaginary. In this case, then, ds assumes the form iεd, where d is a real number (and, of course
. Here a curious situation arises. For when the “infinitesimal interval” ds between P and Q is timelike (or lightlike), the quantity
Σg
μv
k
μ
k
vis nonnegative, so that its square root is a real number
. In this case ds may be written as εd, where d is a real number. On the other hand, if ds is spacelike, then Σg
μv
k
μ
k
vis negative, so that its square root is imaginary. In this case, then, ds assumes the form iεd, where d is a real number (and, of course  ). On comparing these we see that, if we take ε as the “infinitesimal unit” for measuring infinitesimal timelike distances, then iε serves as the “imaginary infinitesimal unit” for measuring infinitesimal spacelike distances
.
). On comparing these we see that, if we take ε as the “infinitesimal unit” for measuring infinitesimal timelike distances, then iε serves as the “imaginary infinitesimal unit” for measuring infinitesimal spacelike distances
.
 , then in the first case, the infinitesimal distance
between P and Q is εd, in the second, it is 0, and in the third it is iεd.
, then in the first case, the infinitesimal distance
between P and Q is εd, in the second, it is 0, and in the third it is iεd.
Caption

The consistency of SIA shows that, on the contrary, yielding to this temptation is compatible with complete mathematical precision: there tangent spaces may indeed be regarded as lying in spacetime itself.Another danger in curved spacetime is the temptation to regard ... the tangent space as lying in spacetime itself. This practice can be useful for heuristic purposes but is incompatible with complete mathematical precision. 60


On this account, Planck scales seem very similar in certain respects to Δ. In particular, the sentence (∗) above seems to be an exact embodiment of the idea that we cannot decide of two “events” in Δ which came first; in fact it makes the stronger assertion that actually neither comes “first”.Some theorists are more willing to speculate than others. But even the boldest acknowledge the “ Planck scales ” as an ultimate barrier. We cannot measure distances smaller than the Planck length [about 10 19 times smaller than a proton]. We cannot distinguish two events (or even decide which came first) when the time interval between them is less than the Planck time (about 10 –43 seconds).
Could Δ serve as a suitable model for “Planck scales ”? While Δ is unquestionably small enough to play the role, it inhabits a domain in which everything is smooth and continuous, while Planck scales live in the quantum world which, if not outright discrete, is far from being universally continuous. So if Planck scales could indeed be modelled by microneighbourhoods in SIA , then one might begin to suspect that the quantum microworld, the Planck regime—smaller, in Rees’s words, “than atoms by just as much as atoms are smaller than stars”—is not, like the world of atoms, discrete, but instead continuous like the world of stars. This would be a major victory for the Continuous in its long struggle with the Discrete.
10.11 Relating Sets and Smooth Spaces
Considerable light is shed on the nineteenth century arithmetization , or set-theorization, of analysis by examining the relationship that exists between Space and the category Set of sets.62
![$$ \neg \forall x\forall y\left[x=y\vee x\ne y\right]. $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equcp.png)
Now, as we have seen, this is precisely the view that most mathematicians and philosophers took of the geometric line, and of continua generally, before the nineteenth century set-theorization of analysis. This suggests that we view the objects of Space as representing continua as they were conceived before that process took place.63 It is also reasonable to take the smooth maps in Space as representing the functions between continua actually recognized by pre-nineteenth century mathematicians, since these were, before the emergence of the notion of a function as an arbitrary correspondence, mostly smooth in any case. The category Space accordingly provides a working “model” of the pre-set-theoretic mathematics of continua.
As we know, the view that a mathematical continuum cannot be composed of points began to change in the nineteenth century, giving way to the arithmetization of analysis and the emergence of a set-theoretic, or discrete, account of the continuum. In effect, this meant the displacement of Space by Set as the locus of activity in mathematical analysis. Let us investigate the relation between the two.
![$$ \forall x\forall y\left[x=y\vee x\ne y\right] $$](../images/474107_1_En_10_Chapter/474107_1_En_10_Chapter_TeX_Equcq.png)
Next, recall that each topological space or manifold has an underlying set of elements or points; we want to extend this idea to a space as an object of Space. What should we mean by a point of a space? The natural response is to define a point of a space S to be a map (in Space) from the terminal object (one-point space) 1 to S. We think of points as being the smallest possible nonempty spaces, so it is natural to stipulate that Space satisffy the
Points Axiom . Each space is either empty or has points.
It follows from this axion that, for any points p, q of a space, either p = q or p ≠ q. In other words, as Aristotle asserted, points either coincide or are totally separate. Clearly 0 is then the only point of Δ.
To ensure that each space has an underlying set of points we introduce the
Discrete Subspace Axiom . Each space S has a unique discrete subspace ΓS such that every point of S is in ΓS.
The space ΓS is called the set of points of the space S. It is the “arithmetized” or “atomized” version of S. ΓS may be thought of as the set obtained from S by removing the “glue” binding the points of S together. Notice that ΓΔ = {0}.
These new axioms (together with those of SIA ) suffice to ensure that each space S has an underlying set of points and each map between spaces induces an underlying function between the corresponding sets of points. But “the underlying sets and functions are far too weakly axiomatized to supply foundations for geometry”.65 In the case of the smooth real line R, for example, the stated axioms ensure only that its underlying set of points ΓR = ℝ is a field, nothing more than a discrete algebraic structure. For ℝ to provide an adequate surrogate for R, it is necessary to capture the concept of convergence , of capital importance to the arithmetical account of the continuum. Since the amorphousness of R undermines the uniqueness of the limit required by the theory of convergence, whatever axioms are introduced to ensure that the usual convergence criteria introduced by Cauchy are satisfied, they must of necessity be formulated for ℝ rather than R. This fact helps to explain why “Cauchy’s theory of convergence led towards set-theoretic as opposed to geometric foundations.”66
We have seen that, following Weierstrass’s lead, Cantor and Dedekind laboured to formulate an independent characterization of ℝ as a discrete set of real numbers . Working as they did “only with discrete collections, using the law of excluded middle ”, 67 their efforts can be seen as taking place in Set rather than Space. Each provided a definition of ℝ as an ordered field, both postulating in addition that “this represented the set of points on the geometric line with [its] arithmetic and order relation.”68 In effect, they “defined ℝ within Set and added an axiom ΓR = ℝ plus others for arithmetic and order.”69
We turn next to the space R R of maps from R to R in Space. We need to distinguish carefully between Γ(R R), the set of functions corresponding to smooth maps from R to R, and ΓR ΓR = ℝℝ, the set of arbitrary functions from ℝ to ℝ. Clearly, however, Γ(R R) ⊆ ℝℝ; in fact, it can be shown that every function in Γ(R R) has derivatives of all orders.
The set Γ(R R) includes all the real-valued functions known to eighteenth century mathematics, in particular, the polynomial, trigonometric, and exponential functions and all functions obtained by composing these. Γ(R R) may be said to represent functions of “the well-behaved form with which mathematicians [of the day] were familiar”.70 But the work of Fourier on trigonometric series in the early nineteenth century stimulated mathematicians to begin to admit as “functions” not of that well-behaved form, that is, functions which are clearly not in Γ(R R).71 but which we would today recognize as being in ℝℝ. This development provided a further motive for the development of an independent theory of ℝ, so also assisting in leading analysis away from Space to Set .
The upshot was that “the [geometric] line came to be defined as ℝ with additional structure [and] smooth maps were defined to be functions with derivatives of all orders .” Set theory came to dominate analysis, and, eventually, geometry as well. In the process, as we have seen, infinitesimals fell by the wayside,72 not to be returned to active duty for another three-quarters of a century. Even more lamentably,
the disappearance of infinitesimals is only a symptom of a deeper loss . The independent reality of spaces and maps almost disappeared from mathematical consciousness as everything was reduced to sets. 73
It is fortunate that today, through category theory and intuiutionistic logic, the means for reviving the geometric vision are at hand.