3
Elements of Form
When two objects collide, the result is pure physics. This is true whether the two objects are vehicles speeding down a freeway, billiard balls rolling along a felt table top, or a runner colliding with the ground with each step, 180 times per minute.
The specific characteristics of those encounters between the ground and a runner’s foot determine how fast an athlete can run, yet most runners devote very little time to working on their “collision dynamics.” While runners concern themselves with such variables as weekly mileage, long-run distance, running speed, heart rate, and the composition of interval workouts, they often ignore the fact that running capacity depends on the quality of a runner’s interactions with the ground and that the outcome of any collision depends on the angles with which objects strike each other. People know this is true when they play billiards but disregard the principle when they run. They are usually not concerned at all about the angles their legs and feet make with respect to the ground at impact—even though some angles are strongly linked to the highest production of propulsive force and the lowest risk of injury, while other angles produce excessive braking forces and increase the chances of getting hurt.
By running the way they’ve always run and believing their naturally adopted gait is best, most runners don’t stress over the exact point of impact with the ground (whether they are hitting the ground with the heel, midfoot, or forefoot), even though choosing the wrong impact area is linked with both higher braking forces and the transfer of injury, producing force at greater rates through the legs. And few runners consider the stiffness of their legs at impact, yet stiffness has a significant effect on collision force patterns. For example, the firmer the ground, the greater the force that is transferred back to the runner’s leg after impact. The stiffer the leg, the greater the force that is pushed into the ground to provide propulsion.
With respect to collision angles of the leg and foot, points of impact with the ground, and leg stiffness, an individual runner’s collisions with the ground are predictable and repeatable. And since no runner (not even Usain Bolt) can move with the speed of light, Newton’s Laws of Motion apply to the outcomes of the collisions, regardless of the athlete’s training volume, heart rate, or aerobic capacity. Newton’s Third Law is especially important from the standpoint of collision forces and running speed: It tells us that if a runner’s foot hits the ground while the leg is relatively straight and the foot is in front of the body, that foot will push down and forward on the ground, and the ground will push up and back on the athlete’s leg and body.
As Newton said, “For every action, there is an equal and opposite reaction.” And the opposite reaction in this case is exactly what the runner does not want, since the forces are directed in opposition to his desired path of movement. In other words, the runner wants to move forward, but his collision with the ground is directing him upward and backward (figure 3.1).

Figure 3.1 When a runner strikes the ground with her heel, well in front of her body, the initial impact (and thus propulsive) forces are directed upward and backward, away from the direction of movement desired by the runner.
When a runner hits the ground with the wrong leg angle, Newton’s laws suggest that the resulting forces must be non-optimal and that the runner can never achieve his best possible running speeds. Therefore, it is imperative for the runner to learn to use the correct collision angle; this is an essential element of good form.
The critical angle of impact is called “shank angle” and is determined by the angle the shank makes with the ground at initial impact. Shank angle is measured at the exact moment the foot makes first contact with the running surface. To determine shank angle, a line is drawn from the center of the knee, parallel with the shank, directly to the ground. Another line is then drawn straight forward along the ground, from the point at which the line parallel with the shank touches the ground. Then, 90 degrees are subtracted from this angle to reveal the actual shank angle, which is therefore the angle between the shank and a line perpendicular with the ground at the point of impact.
For example, let’s say that the angle between the ground and shank at first impact is 100 degrees (figure 3.2). The actual shank angle is 100 − 90 = 10 degrees. (Remember that the shank angle is actually the angle between a line drawn perpendicular with the ground at the point of impact and the shank itself.)

Figure 3.2 Shank angle is the angle between the shank and a line drawn perpendicular to the ground at the point of impact.
A shank angle can be positive, neutral, or negative. If the shin is inclined forward from the knee when the foot makes contact with the ground, the shank angle is positive (figure 3.3). If the shank is perfectly perpendicular with the ground when the foot hits the ground, the shank angle is neutral, or zero degrees (figure 3.4).
If the shank is inclined backward from the knee at the time of impact, the shank angle is negative by definition. In this situation, the total angle between the ground and the shank is going to be less than 90 degrees. If we say it is 84 degrees, then the shank angle at first impact will be 84 − 90 = negative 6 degrees (figure 3.5), and the athlete is in effect falling forward at impact with the ground.

Figure 3.3 When the shank is inclined forward from the knee at the moment of impact, the shank angle is positive.

Figure 3.4 When the shank is perpendicular to the ground at the moment of impact, the shank angle is neither positive or negative—it is zero.

Figure 3.5 When the shank is inclined backward from the knee at the moment of impact, the shank angle is negative.
The Paradox of Small, Positive Shank Angles
Why is shank angle at initial impact (also called shank angle at touchdown, or SAT) an absolutely critical element of running form, even though it has never been mentioned as such—anywhere—prior to publication of this book? As Sir Isaac Newton pointed out more than 300 years ago, the angle at which two objects collide with each other determines the directions of the forces created. A negative shank angle, with the leg pushing down and back on the ground and thus the ground pushing ahead and up on the leg and body, would appear to be optimal during running (but read chapter 11 to find out why this is actually not the case). In theory, a neutral, zero-degree shank angle might be very good because it would allow a runner to bounce forward elastically and economically (like a basketball bouncing along a court), with very little braking force during each impact with the ground. Positive shank angles would appear to be sub-optimal since they bring significant braking forces into play, especially at larger shank angles in which braking forces on the body are directed upward and backward fairly dramatically. The bottom line is that shank angle determines the braking and propulsive forces that are present when a runner’s foot hits the ground. Thus, shank angle is critically important, since it determines forward velocity. As it turns out, shank angle also has a strong effect on the risk of injury, with large, positive shank angles significantly raising the chance of getting hurt. Somewhat surprisingly, though, small, positive shank angles are actually optimal.
There is no gene for shank angle, and therefore it is not genetically determined. It is controlled by environmental factors and extremely subject to corruption by the modern running shoe. It is certainly not set at its optimal position in all runners. In fact, most runners run with horrible shank angles at impact, which both slows them down and magnifies their probability of injury. Fortunately, shank angle is trainable, and—this is critical—it should be trained, despite the popular, but misguided, view that a runner runs the way he runs and nothing should be done about it. As a key element of running form, shank angle can be adjusted and made optimal with the use of some superb running-form drills that teach the nervous system how to control the angle of the shank with the ground at impact. These drills will be fully described in chapter 7. It seems likely that Isaac Newton would be proud of this use of his Third Law.
The Importance of Maximum Shank Angle
In addition to SAT, there is another angle relevant and critically important to form: maximum shank angle. Unlike SAT, which is measured when the foot makes initial contact with the ground, maximum shank angle is determined during the swing phase of gait, when the foot is airborne and moving ahead of the body. In fact, maximum shank angle is usually measured when the foot has reached its farthest point forward relative to the body during forward swing of the leg. To calculate maximum shank angle, a line is again drawn from the knee to the foot, completely parallel with the shank itself. Another line is drawn parallel with the ground from the bottom end of the shank (knee-to-foot line); the angle between these lines is computed (figure 3.6). Once again, 90 degrees is subtracted from this angle to determine maximum shank angle. In figure 3.6, the maximum shank angle for the runner would be 114 − 90 = 24 degrees

Figure 3.6 Maximum shank angle is the largest angle the shank makes during forward swing of the leg.
Why is maximum shank angle an important element of running form, even though—like SAT—it has never before been described in a book, article, blog, video, or app? For one thing, maximum shank angle can be related to step length, which is an important performance variable determined by form. Step length is one of the two essential factors that determines running speed, the other being step rate. The equation for this is simply Running Speed = Step Rate (steps per second) × Step Length (in meters). For example, a runner moving along with a step rate of three steps per second and a step length (distance between steps) of 2 meters per step would be running at a speed of 6 meters per second, or a tempo of 400/6 = 66.7 seconds per 400 meters. Maximal running speed, a strong predictor of distance-running performance (and of course sprint performance too), is the optimal combination of step rate and step length, and step length can be strongly associated with maximum shank angle. As an aside, this association can occur for two different reasons:
- A less skilled runner might simply allow the foot to plop onto the ground after a large forward swing and with a hefty maximum shank angle, thus creating a rather long (but sub-optimal) step length—sub-optimal because of the backward-directed propulsive forces and the corresponding negative effect on step rate.
- A more accomplished runner might accelerate the foot dramatically back toward the ground after achieving a big maximum shank angle and thus transfer an impressive amount of kinetic energy into the ground (more than could be attained with a small maximum shank angle). This causes the body to fly forward farther and correspondingly creates a relatively long step length.
Maximum shank angle is very important for another reason: It has a direct impact on another critically important form variable called reversal of swing (ROS), or the difference between maximum shank angle (MSA) and shank angle at touchdown (SAT). For example, if a runner has an MSA of 15 degrees and an SAT of three degrees, by definition his ROS is then 15 − 3 = 12 degrees (refer back to figure 2.8a and b). In other words, the runner has swept his foot back 12 degrees from the maximum position prior to collision with the ground; he has reversed maximal swing by 12 degrees.
ROS is another essential element of form. Picture a runner’s foot, either the right or left, as it moves through the entire gait cycle, from toe-off through airborne swing, then back to the ground via ROS, and then through the stance phase of gait with a return to toe-off. What would a diagram of the foot’s pattern of movement look like?
The Kidney Bean in Your Stride
If you answered “a rectangle,” it is a good thing that you purchased this book—as your concept of running form needs some updating. If you answered “an oval,” you are getting closer and deserve at least a “C” on your running-form exam. But in fact, as famed German running coach Winfried Vonstein has pointed out, the actual trajectory of the foot is shaped like a kidney bean (1) (figure 3.7).
As shown in figure 3.7, after toe-off the foot moves backward and upward, then starts forward and takes a little downward dip, producing the concavity on the top side of the kidney bean. It then moves upward and forward until it reaches its farthest distance ahead of the body, at which point maximum shank angle (MSA) is measured. From the point of maximum shank angle, the foot then starts back toward the body and downward toward the ground before making impact with terra firma at SAT. The movement of the shank and foot from the most-forward point to initial ground contact is the ROS and the subsequent phase of gait is sometimes referred to as the “clawing” (or pawing) action of the foot on the ground. The foot remains on the ground (the “stance” phase of gait) as the body passes overhead before once again toeing off and moving upward and backward. The overall pathway of the foot traces the shape of a kidney bean in almost every runner.

Figure 3.7 The foot has a kidney bean shaped flight path during running.
As Vonstein has pointed out, this has some implications for proper pelvic position during running. For example, if the bottom of the pelvis is tilted backward (and thus the top of the pelvis is tipped forward), the foot’s acrobatics change and the kidney bean can spoil and become rotten (figure 3.8, and also see figure 1.1b). Specifically, the ability of the foot to move forward is crippled when the top of the pelvis tips forward, as this decreases MSA, ROS, and almost certainly running velocity. The capacity of the foot to move backward is enhanced when the bottom of the pelvis is back—but this produces no positive gain in running speed (in effect, it reduces the magnitude of vertical propulsive forces, which, as we will see in subsequent chapters, are so critical for speed). In contrast, if the pelvis is aligned vertically, with no significant forward or rearward tilt, maximum shank angle is not harmed, and stride length and ROS are not impaired (figure 3.9).

Figure 3.8 A pelvis which is tilted forward can thwart MSA, ROS, and SAT.

Figure 3.9 An upright pelvis does not harm MSA, ROS, or SAT.
Sir Isaac Newton and Your Next Marathon or 10K
As mentioned, the movement downward and backward of the foot to the ground, starting from the point at which the foot has reached its farthest point ahead of the body, is called sweep or reversal of swing (ROS). The foot hits the ground at the end of ROS, and that is when Newtonian kinetic energy must be considered if a runner wants to move along with optimal form and speed. Though Sir Isaac was not much of a marathoner or cross-country runner, he rightly pointed out that the kinetic energy of an object is the energy the object possesses as a result of its movement. We can apply this to running; in this case, the object that is moving is obviously the runner’s leg and foot. The work that the leg and foot carry out as the foot makes contact with the ground determines the forward propulsive forces created and thus the speed of the runner. And that work is a direct function of the kinetic energy of the leg; the greater the kinetic energy, the greater the work done on the ground and the higher the propulsive force that can be developed.
The equation for this phenomenon is simply Ek = ½ mv2, where Ek is the kinetic energy of the leg and foot, ½ is a constant, m is the mass of the leg and foot, and v is the velocity of the leg and foot. From this equation it is possible to see that the kinetic energy of the leg during running, and specifically during ROS, is determined by the leg’s velocity. Expressed another way, the work that the foot and leg can do on the ground, and thus the propulsive force that can be created, depends on the ROS velocity of the leg and its attached foot. In fact, work and force depend on the square of the velocity of the leg (as can be seen in the equation), which means when the velocity of the leg during ROS doubles, the kinetic energy of the leg quadruples.
The importance of ROS is readily apparent. Yet the average distance runner has an MSA of about 18 degrees and an SAT of only 16 degrees. Yes, that’s right: His ROS is an outrageously small two degrees (figure 3.10).
Very little velocity can be generated from such a small ROS. Further, when the velocity of the leg is generated during only two degrees of movement, the leg has very little kinetic energy as it approaches the ground and very little propulsive force can be created via ground contact. Yet this is the way the vast majority of distance runners move along the ground, with tiny doses of ROS and large SATs. Instead of creating large propulsive force, they are generating mega quantities of braking force. This helps explain why average runners are so slow. It would all seem a little depressing—except that ROS and SAT and thus the forces the leg applies to the ground are responsive to proper form training. Specifically, the drills outlined in this book will dramatically upgrade ROS and SAT and lead to significantly faster running.
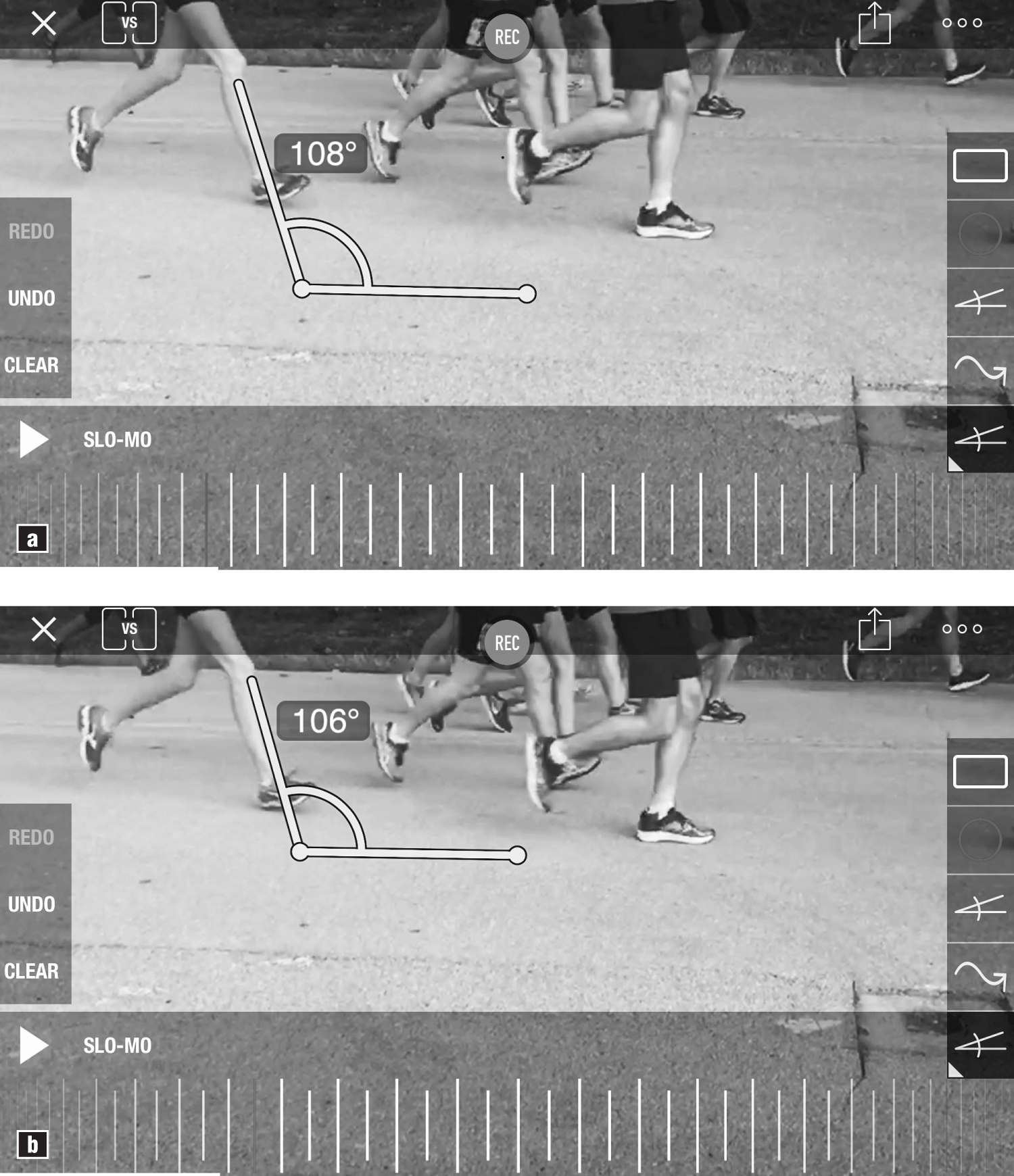
Figure 3.10 (a) This very typical runner has an MSA of 18 (108 - 90) and (b) an SAT of 16 (106 - 90). Thus, ROS is only two degrees, and a ridiculously small amount of kinetic energy imparted to the ground at impact.
What is the ROS of Usain Bolt, the world’s fastest human in 2017? It is close to insane, as Bolt usually prefers an ROS of about 21 degrees or so when he runs 100 meters at top speed. (His maximum shank angle is often about 28 degrees when he sprints 100 meters, and his ground-contact shank angle is frequently close to 7 degrees, creating an ROS of 21 degrees, or 75 percent of maximal shank angle (2).) Over the course of those 21 degrees, an amazing amount of velocity is generated, resulting in a high level of kinetic energy that can be transformed into force-generating work against the ground. Elite marathon runners, of course, don’t have to generate such “Bolts” of lightning as they run at their relatively slower paces. For example, when Dennis Kimetto set the men’s world record for the marathon, he employed an average ROS of about 8 degrees (from 14 at MSA to 6 at SAT) (3)—just over one-third as much as Bolt yet four times as much as the average distance runner.
ROS to Maximum Shank Angle Ratio
This discussion of maximum shank angle and reversal of swing leads us to another critical, quantifiable form variable: the ratio of Reversal of Swing to maximum shank angle, or ROS/MSA. This variable tells us how effectively a runner is using his swing—in other words, once he “loads his gun” (puts his foot out in front of his body), how much of that loading process is used to place propulsive force on the ground. In most cases, the higher the ratio (ROS/MSA), the better the force applied to the ground.
Take the case of the average runner we previously mentioned, who swings out 18 degrees but reverses that swing and moves the high leg back by only two degrees before hitting the ground, producing a minuscule ROS/MSA of 2/18, or .11. Essentially, she is moving her leg and foot back only 11 percent of the distance she moved them forward, and thus is producing only a minor amount of desired propulsive force on the ground. Furthermore, with her foot so far ahead of the body (since she has not come back the remaining 89 percent), she is producing huge braking forces with each ground collision.
How much better she would be as a runner if she would sweep halfway back, hitting the ground with an SAT of 9 degrees, thus producing an ROS/MSA of 9/18 = .5? There would be considerably less braking force, with the foot not so far ahead of the body, and much more propulsive force because of the greater kinetic energy developed by the leg during sweep.
She would be even better yet with a larger ROS, coming back to an SAT of about 6 degrees, thus producing an ROS/MSA of 12/18 = .67. This would decrease braking force, since the foot would be closer to the body at impact and would simultaneously increase propulsive force, thanks to the increase in Newtonian kinetic energy.
You might think that a full sweep back to an SAT of 0 degrees would be optimal, since it would minimize braking force. That is logical; however, this creates a situation in which the shank is not at the proper angle when maximal propulsive force is created.
In fact, research carried out by noted running-form expert Walt Reynolds suggests that the optimal ROS/MSA (from the standpoint of creating the highest running speeds) is approximately .7 to .75 (3). In other words, after you swing out with your foot, you should sweep back and reverse the swing by about 75 percent of the swing distance before making contact with the ground. A ratio lower than .75 expands braking forces and decreases forward propulsive forces; a higher ratio tends to decrease forward propulsive forces as well.
Foot-Strike Pattern
The way the foot itself strikes the ground is yet another essential component of form. In a forefoot-strike the initial contact of the foot with the ground is toward the front portion of the shoe, with no heel contact at initial foot-strike. A midfoot-strike is one in which roughly the middle region of the shoe makes first contact with the ground, with the heel contacting the ground shortly thereafter. A heel-strike, also known as rear-foot strike, is one in which the first contact of the shoe with the ground is made in the heel area (4).
Foot-strike pattern is an important element of form because it affects the duration of the stance phase of gait and thus another important form variable: cadence, or the number of steps taken per minute, which is one version of step rate. Foot-strike pattern also shapes the velocity and magnitude of impact forces that travel up the leg after the foot collides with the ground.
Heel-striking does not fare well from the standpoints of stance duration and the “loading rate” of force (the rate at which force on the leg increases after impact). Heel-striking tends to expand the duration of stance by about one-hundredth of a second, compared with midfoot- or forefoot-striking. While this might seem small, those hundredths of seconds, which are unnecessarily wasted on the ground, add up over time. In the case of a heel-striking runner taking 180 steps per minute while running one mile (or 1.6 kilometers) in five minutes, the equation 5 minutes × 180 steps per minute × .01 seconds = 9 seconds shows he is unnecessarily glued to the ground for a significant amount of time. In other words, he has the potential to reduce his time from 5:00 to 4:51 simply by changing from heel- to midfoot-striking. If he is running the half-marathon, the gains would be even greater: 13.1 miles × 9 seconds per mile = 117.9 seconds “lost” on the ground because of heel-striking, which can potentially be retrieved by shifting to midfoot-striking. An improvement in time of 1:57 could be achieved, which would be a huge gain for a near-elite male competitor, in this case from 65:30 to 63:33.
Of course, the gains for a non-elite runner could be even greater. Take the case of a half-marathon runner moving along at 8 minutes per mile with a cadence of 180 steps per minute and a heel-strike pattern. The equation 8 × 180 × .01 seconds = 14.4 seconds per mile shows he is spending an excessive amount of time on the ground per mile. Per the equation 13.1 × 14.4 = 188.6 seconds, he is 3 minutes and 8 seconds slower than he could be if he were using midfoot-striking.
A beginning runner moving along at a relatively slow speed spends about 70 percent of his time on the ground while running and 30 percent of his time flying forward, whereas the fastest humans spend only 39 percent of their time on the ground with 61 percent of their time in flight. Shifting from heel-striking to midfoot-striking can help the average runner make the transition to more flight time with less stance time and attain higher training speeds, greater overall fitness, and faster competitive running velocities.
Compared to midfoot-striking, heel-striking also has a dramatic effect on the way impact forces are experienced by the foot, leg, hips, and spine. Specifically, heel-striking creates a greater “impact transient,” meaning impact force travels up the leg more quickly with a heel-strike pattern, compared with midfoot-striking. In fact, heel-striking creates a quick spike of impact force that hammers the leg, compared with the less traumatic and more even distribution of force associated with midfoot-striking (see figure 2.3 in chapter 2).
The loftier impact transient associated with heel-striking creates a greater risk of injury, compared with midfoot-striking. Fortunately, like SAT, MSA, and ROS, foot-strike pattern is highly trainable. This is especially fortunate, since approximately 95 percent of distance runners are confirmed heel-strikers. Another term, foot angle at touchdown (FAT) describes what the foot is doing at initial impact with the ground. There will be more information about FAT in subsequent chapters (figure 3.11).

Figure 3.11 FAT is simply the angle the foot makes at initial impact with the ground.
Cadence and Lean
As mentioned previously, cadence (one version of step rate) is simply the number of steps taken per minute during running. Cadence is fundamentally important for running performance because it is one of the two variables that determines running speed, the other being step length.
During quality workouts and competitions, elite runners always move along with a cadence of at least 180 steps per minute, suggesting that it is a kind of threshold for cadence which should be strived for by runners hoping to improve their training and competitive speeds. A higher cadence generally means that a runner is spending less time on the ground per step and thus has the potential to achieve greater relative flight times and distances and higher running speeds.
Cadence is linked with other form variables. For example, midfoot-strikers tend to have a naturally higher cadence, compared with heel-strikers. In fact, if you require a runner to move along with a higher cadence than usual, he will almost always automatically shift toward a midfoot-strike pattern (if he is normally a heel-striker). Runners who slightly lean forward from the ankles during the stance phase of gait also tend to have a higher cadence (figure 3.12), compared with upright runners and those unfortunate souls who actually lean backward while attempting to run the 5K or marathon.

Figure 3.12 Lean is simply the angle made by the body with respect to a line drawn perpendicular to the ground at the heel during stance.
If the runner is leaning forward, the lean is positive. If she is completely upright and perpendicular to the ground, the lean is neutral. If she is leaning backward, the lean is negative. Slight forward lean is preferred because it is believed that, in conformity with Newton’s Laws of Motion, propulsive force applied to the ground travels through the body in the direction of the body, and it is better that the force be applied upward and forward, rather than straight upward, or upward and backward. Excessive forward lean could, of course, reduce step length; it is believed that a forward lean of about 5 percent is close to optimal.
Posture
As Walt Reynolds has pointed out (3), running posture is composed of three key elements: arm action and placement; trunk rotation; and the relative positions of the head, neck, and trunk with respect to each other.
Among a group of one thousand runners, the arms are held and moved in one thousand different ways. However, it is clear that certain arm habits have a negative impact on running performance and that there is a most economical way to use the arms during gait. For example, “winginess,” or holding the arms out to the sides, cannot be a positive, since it forces the runner to expend energy keeping the arms laterally suspended. Similarly, large looping actions of the arms tend to be rather slow movements; if a runner learns to run in this way, his legs will usually move slowly in parallel with the upper limbs, producing a meager cadence. Arms with big swing (associated with their active, energy-using, concentric contractions of the shoulder muscles) are also energetically costly, compared to a situation in which the arms simply swing back and forth like nearly friction-free pendulums suspended from the shoulders. It is important for distance runners to note that their  O2max (maximal aerobic capacity) is not an infinite variable. It makes little sense to eat up a significant fraction of that O2max during running as a result of arm action. The available oxygen should be used by the part of the body that actually produces forward propulsion—notably the core, legs, and feet.
O2max (maximal aerobic capacity) is not an infinite variable. It makes little sense to eat up a significant fraction of that O2max during running as a result of arm action. The available oxygen should be used by the part of the body that actually produces forward propulsion—notably the core, legs, and feet.
It is clear that the most economical pattern of movement of the arms can be recommended without trepidation, especially since the modern runner realizes that the arms do not provide propulsive force. An economical pattern involves a simple, straight-ahead swinging action of the arms from the shoulders, with the hands beside the hips at the end of the arm backswing and the elbows beside the hips at the end of the forward swing of the arms. Furthermore, since long levers are more costly to move back and forth than short levers, and since the arms are indeed levers, it would appear optimal to shorten the levers by initiating 90-degree angles at the elbows and then moving the hands roughly halfway to the shoulders during running (figure 3.13 and 3.14).
The economy principle also applies to rotational actions of the trunk during running. It makes little sense to rotate the trunk significantly, like a washing machine, clockwise and counter-clockwise, as a runner moves along. The greater the rotation, the larger the energy expenditure. “Wash-tubbing” is also evidence that a runner has a weak core. While it is natural for the right arm to move ahead as the left knee drives forward during gait, it is not natural or economical for the trunk to rotate counter-clockwise significantly to accomplish a counter-balance to the forward movement of the left leg. In other words, forward leg movement should not perturb body balance so much that a dramatic counter-rotation of the trunk is required to achieve balance. A relatively still trunk is preferred. This is attained through diligent training of the core and by paying attention to what the trunk is doing during running.

Figure 3.13 The 90-degree position of the elbows.

Figure 3.14 The halfway position, with the hands moved toward the shoulders.
Finally, upper body posture can be determined by taking video of a runner and then placing points (on a still image from the video) at the center of the runner’s head, the center of her neck, and the centers of her thorax and hips. When the dots are connected, the line should be straight. If it is not straight, the runner is moving along with her upper body hunched forward or leaning backward, neither of which is optimal (figure 3.15). Hunching the upper body forward tends to decrease step length and thwart the attainment of the types of speeds that can be obtained with a straighter posture. Leaning the upper body backward tends to push the feet out in front of the center of mass, which increases braking forces whenever a foot hits the ground.

Figure 3.15 Hunching the body forward tends to decrease step length and reduce running speed.
Fortunately, all three postural elements—arm action; trunk rotation; and head, neck, and trunk position—can be optimized by the drills described later in this book.
Summary
For the first time in running history, running form can be quantified and then developed and coached in a proper way. The key variables of form are maximum shank angle (MSA), shank angle at touchdown (SAT), foot angle at touchdown (FAT), reversal of swing (ROS), and the ratio of ROS to MSA (ROS/MSA). These essential variables can be measured easily by runners and coaches and then improved steadily over time to produce optimal running form. Such form will produce a “collision physics” of running that simultaneously optimizes propulsive forces, minimizes braking forces, and controls the rate at which impact forces are transferred through the leg and body (thereby decreasing the risk of injury).
References
1. W. Vonstein, “Some Reflections on Maximum Speed Sprinting Technique,” New Studies in Athletics 11, no. 2–3 (1996): 161–165.
2. Owen Anderson, personal observation, July 7, 2017
3. Walt Reynolds, video analysis, July 7, 2017
4. P. Larson et al., “Foot Strike Patterns of Recreational and Sub-Elite Runners in a Long-Distance Road Race,” Journal of Sports Sciences, 29, no. 15 (2011): 1665–1673.